
Моторы L2215J 900kV 200W – 4 шт.
Бесколлекторный двигательTurnigy L2215J-900 (200w)
Аккумулятор 5000mA, 11.1V, 20С
ZIPPY Flightmax 5000mAh 3S1P 20C аккумулятор
Аппаратура Turnigy 9X с 8-миканальным приёмником
Передатчик Turnigy 9X (Mode2 - газ СЛЕВА, 9 каналов, версия 2). В/ч модуль и приёмник (8 каналов)
GPS-приёмник – Ublox Neo-6M
(но лучше этот GPS-модуль UBLOX LEA-6H (версия 1.01) с встроенной антенной высокой точности.
Bluetooth-модуль – OR-BTM-115.2 с разъёмом RoboBus
Плата контроллера – Crius All In One Pro
Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560)
Радио-модуль APC220 – 2 шт.
2 прямых и 2 обратных винта 10х4,7
Пропеллеры 10x4,5 SF (цвет чёрный) 2шт. стандартного вращение / 2шт. RH вращения.
Пропсейвер – 4 шт.
Prop Saver w/ Band 3mm (10pcs)
Регулятор оборотов на 25А (со стабилизатором на 2А) – Turnigy AE-25A – 4 шт.
Регулятор для бесколлекторных двигателей Turnigy AE-25A
Метиз:
Винты:
М3х15 – 1 шт.
М3х25 – 8 шт.
М4х30 – 4 шт
М4х60 – 4 шт
Шайба 9 – 14 шт.
Гайки:
М3 – 1 шт
М4 – 16 шт.
Стеклотекстолитовая моторама – 4 шт. Стяжка нейлоновая – 8 шт.
Стяжка нейлоновая – 8 шт.
Типа таких Нейлоновые стяжки 3,6 x 250 мм 100 шт (Цвет белый)
Зуммер – 1шт.
"Пищалка" для поисков модели в траве от Hobby King
Сборка каркаса
Детали каркаса вырезаны из стеклотекстолита толщиной 1,5 мм. и покрыты нитроэмалью.
и покрыты нитроэмалью. Аккум крепится к детали 1 двусторонним скотчем. Разъём на аккумуляторе не перепаивал.
Аккум крепится к детали 1 двусторонним скотчем. Разъём на аккумуляторе не перепаивал.
Сверху к аккуму на двусторонний скотч крепится деталь 2. Деталь 1 и 2 стягиваются между собой пластиковыми стяжками.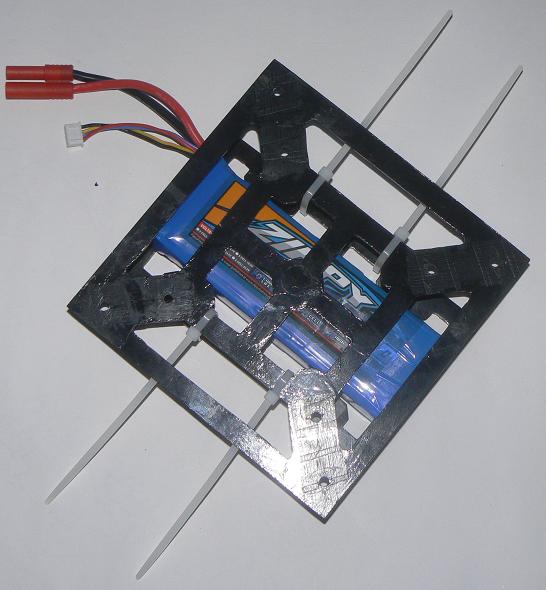 В центр детали 2 крепится узел питания регуляторов. Входы питания регуляторов соединяются вместе («плюсы» в один узел, а «минусы» - в другой). Распаян разъём для подключения датчика напряжения.
В центр детали 2 крепится узел питания регуляторов. Входы питания регуляторов соединяются вместе («плюсы» в один узел, а «минусы» - в другой). Распаян разъём для подключения датчика напряжения.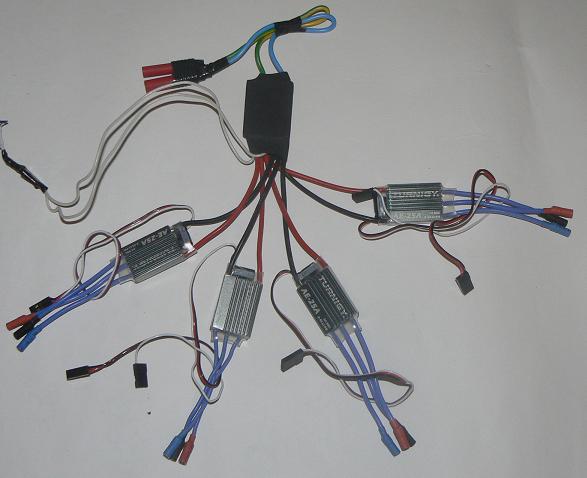 Деревянные лучи длиной 200мм. (квадратный профиль 20х20 мм.) предварительно обмотаны чёрным скотчем/изолентой и в них подготовлены отверстия для крепления к раме и моторам.
Деревянные лучи длиной 200мм. (квадратный профиль 20х20 мм.) предварительно обмотаны чёрным скотчем/изолентой и в них подготовлены отверстия для крепления к раме и моторам. Мотор крепится к лучу винтами Ø3мм. Стандартная моторама мотора слабовата, поэтому заменил её на самодельную (из стеклотекстолита).
Мотор крепится к лучу винтами Ø3мм. Стандартная моторама мотора слабовата, поэтому заменил её на самодельную (из стеклотекстолита).  В отверстия детали 2 вставляются винты Ø4 (шляпками вниз). Длинные винты расположены ближе к центру, а короткие – к краю детали.
В отверстия детали 2 вставляются винты Ø4 (шляпками вниз). Длинные винты расположены ближе к центру, а короткие – к краю детали.
Деревянные лучи продеваются в выступающие винты Ø4мм. с установленными на них моторами. Расстояние между длинным винтом крепления к раме и осью мотора равно 170 мм.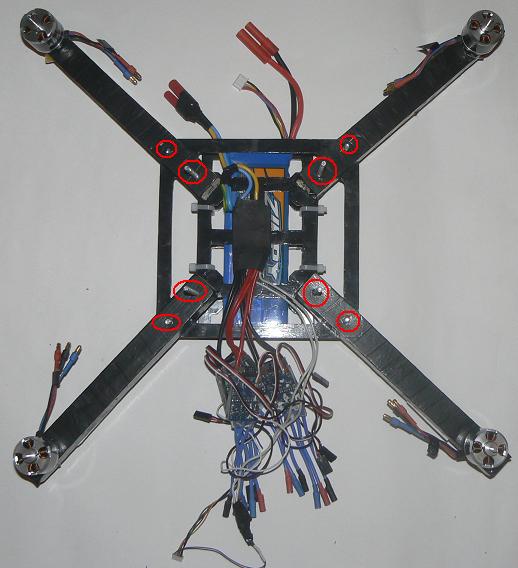 Деталь 3 насаживается на винты Ø4 сверху прижимая лучи. Все винты Ø4 стягиваются гайками М4 с шайбами. Хорошенько протягиваем гайки, и если возможно фиксируем краской. Мы же не хотим, чтобы коптер развалился в полёте.
Деталь 3 насаживается на винты Ø4 сверху прижимая лучи. Все винты Ø4 стягиваются гайками М4 с шайбами. Хорошенько протягиваем гайки, и если возможно фиксируем краской. Мы же не хотим, чтобы коптер развалился в полёте.
В центре детали 3 скотчем 2 слоя (для виброразвязки) крепится плата контроллера (стрелкой вперёд). Предварительно, барометрический датчик накрывается кусочком поролона, чтобы воздушные потоки от винтов не влияли на показания датчика.
Слева от платы необходимо закрепить на скотч приёмник разъёмами вниз, чуть повыше центра (так удобнее потом прокладывать сигнальные провода, и не дать им перетереться о крепёжные винты). 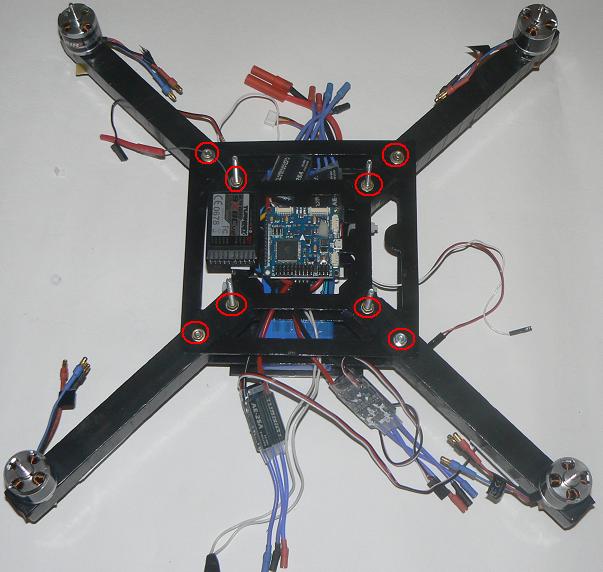 На деталь 4 снизу крепится GPS-модуль. Справа от платы контроллера крепится Bluetooth-модуль и подключить его к разъёму [S0/FTDI]. Антенна приёмника располагается спереди на детали 4.
На деталь 4 снизу крепится GPS-модуль. Справа от платы контроллера крепится Bluetooth-модуль и подключить его к разъёму [S0/FTDI]. Антенна приёмника располагается спереди на детали 4.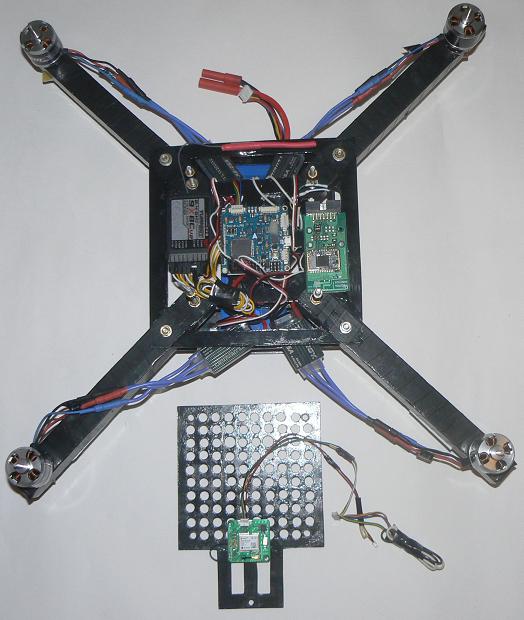 На 4 винта необходимо накрутить гайки и выбрать ими необходимую высоту. Деталь 4 насаживается на винты Ø4 сверху.
На 4 винта необходимо накрутить гайки и выбрать ими необходимую высоту. Деталь 4 насаживается на винты Ø4 сверху.
Деталь 5 крепится сзади детали 4 на винт Ø3 и гайку М3. Получается что-то вроде хвоста. В полёте по нему можно определить положение коптера. Планирую на хвост прилепить мигающий стробоскопический светодиод. Деталь 4 притянуть гайками с шайбами и по возможность зафиксировать краской. Провода моторов нужно стянуть нейлоновыми стяжками.
Провода моторов нужно стянуть нейлоновыми стяжками.
Посадочные стойки я изготовил из экструдированного полистирола. Вырезал из него 4 «кирпича» размером 20х50х90мм. Обклеил цветным скотчем. Стойки крепятся снизу к лучам на двусторонний скотч.
Стойки крепятся снизу к лучам на двусторонний скотч.
Электронная схема
Зуммер необходимо подключить к 6-му каналу приёмника аппаратуры радиоуправления.
Датчик напряжения подключается ко входу A0 разъёма [A0-A5] на плате контроллера: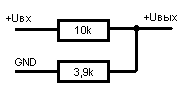 Выводы двух стабилизаторов регуляторов следует разделить на «питание» и «сигнал». Одно «питание» пойдёт на радио-модуль APC220, а другое на приёмник аппаратуры радиоуправления.
Выводы двух стабилизаторов регуляторов следует разделить на «питание» и «сигнал». Одно «питание» пойдёт на радио-модуль APC220, а другое на приёмник аппаратуры радиоуправления.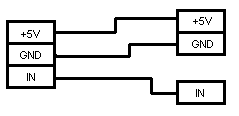 Подключение приёмника к плате контроллера:
Подключение приёмника к плате контроллера:
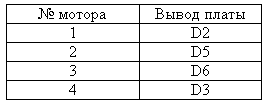
Питание подать на входы BAT. Подключение регуляторов к плате контроллера и настройка моторов:
Подключение регуляторов к плате контроллера и настройка моторов: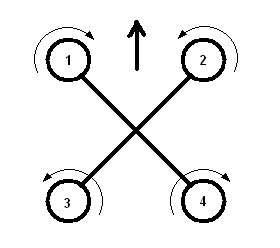
 В комплекте с мотором идут клеммы, которые необходимо подпаять к выводам регулятора. Если мотор не крутится в нужную сторону, то необходимо поменять местами любые две клеммы разъёма подключения мотора и регулятора.
В комплекте с мотором идут клеммы, которые необходимо подпаять к выводам регулятора. Если мотор не крутится в нужную сторону, то необходимо поменять местами любые две клеммы разъёма подключения мотора и регулятора.
Подключение GPS-приёмника:
Приёмник Ublox Neo-6M запитывается от разъёма [I2C] платы контроллера (здесь более стабильное питание), а линии данных заводятся на TX2/RX2 разъёма [S1-S3]. Модуль крепится скотчем на внутреннюю сторону детали 4 каркаса. Располагать желательно подальше от платы контроллера и силовых линий.
Подключение Bluetooth-модуля OR-BTM-115.2:
Подключается модуль к разъёму [S0/FTDI] платы контроллера. Этот разъём является дублёром разъёма USB для настройки платы Cruis AIO Pro. Подключение Bluetooth-модуля позволяет дистанционно настраивать коптер.
Подключение радио-модуля APC220:
Радио-модуль пока ещё не подключен. Посылка с ним находится в пути ко мне. Но передача телеметрии с борта на компьютер проверена с помощью Bluetooth-модуля.
APC220 нужно подключить в выводам RX1/TX1 разъёма [S1-S3].
Про настройку радио писать не стану. Эту информацию легко найти в интернете.
Прошивка и программное обеспечение
Сначала необходимо установить драйвер для платы контроллера.
Прошивка
Для платы Crius AIO Pro я использовал прошивку MegapirateNG v.2.7. Причём модуль Remzibi_OSD был мною переписан для передачи необходимой телеметрии на компьютер.
Стандартная прошивка MegapirateNG v.2.7 R4
Переделанная прошивка (ArduCopter.rar)
Если установить не правленую прошивку, то нужно настроить её под коптер. Немного описания этого процесса здесь.
Программа настройки
Для настройко ПИДов, калибровки и т.п. я использовал Mission Planner 1.2.50 mav 1.0.
Включение и калибровка компаса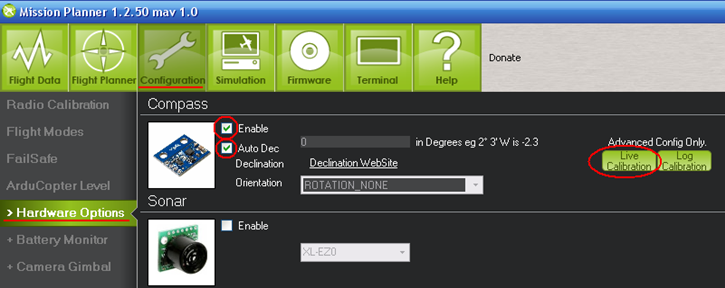 Калибровка акселерометра
Калибровка акселерометра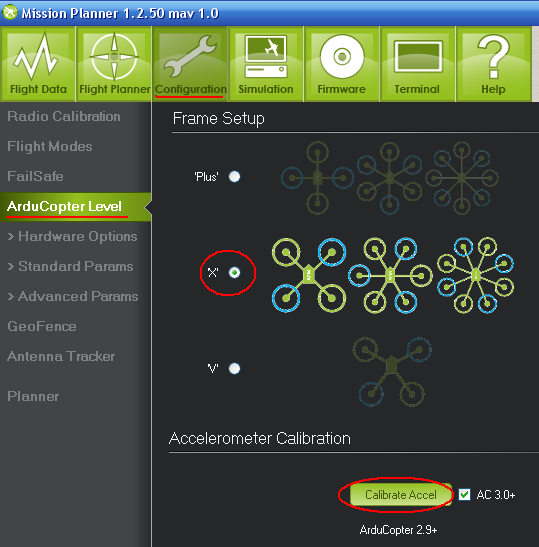 Экран настройки полётных режимов (привязываются ко 5-му каналу приёмника)
Экран настройки полётных режимов (привязываются ко 5-му каналу приёмника)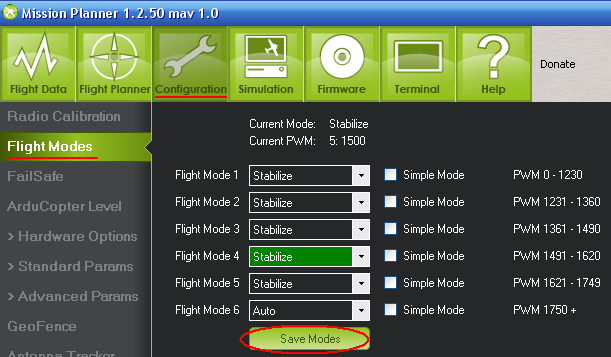 Настройка ПИД
Настройка ПИД
4Copter Telemetry v.4
Самодельная программа, находится в разработке. Реализую возможность управления коптером с компа (взлёт, посадка, назначение полётных точек в реальном времени и т.п.).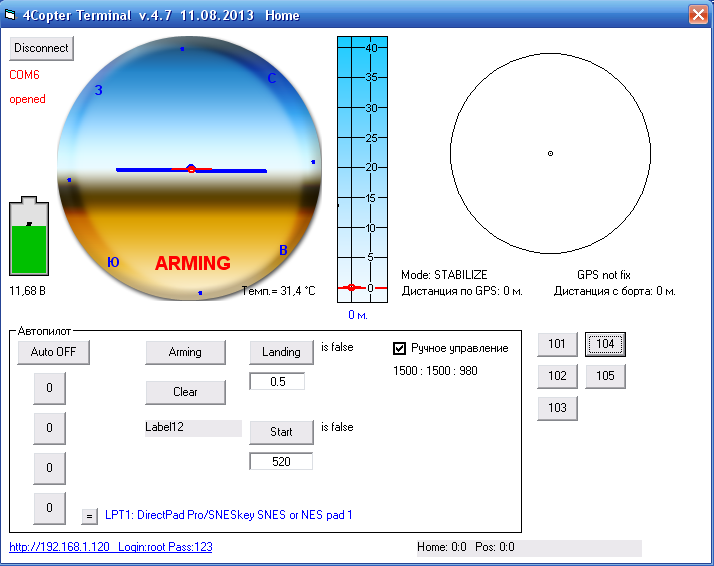 После проверки работоспособности всех частей, осталось только одеть на валы моторов пропсейверы и установить винты.
После проверки работоспособности всех частей, осталось только одеть на валы моторов пропсейверы и установить винты.
Может быть статья написана несколько суховато, но это первая, я исправлюсь :) Принимается любая критика.
Спасибо за внимание. Удачных всем полётов!













Почитал, проникся, пошел собирать квадрокоптер.
P.S. Погрела опечатка "нежно настроить её под коптер". :)
Об изготовлении датчика было рассказано здесь.
но стоит конечно отметить, что такой аппарат всё-же довольно таки полезен с его обилием электроники, жаль что всё убивается при падении, да и время полёта оставляет желать лучшего +
Немного не согласен, существуют гексы, октокоптеры, которые приотказе одного движка способны не только сесть, но и долететь до точки посадки. К тому же при потере связи с пультом коптер (как писалось выше напичканый электроникой) сам вернется к хозяину, а вот самолет улетит так далеко, что вы его вряд ли найдете! Так что все тут относительно, к тому же кому что больше нравится). Автору + за работу, сам собираю из "полуфабрикатов".