
Первой системой стабилизации был Flymentor3D, с его помощью я научился летать на вертолете, неоднократно он спасал от заруливаний. Прогресс не стоит на месте системы стабилизации научились получать сигналы со спутников. На рынке автопилотов появилась новинка от компании DJI - Naza-H.
Данный производитель уже давно занимается разработкой автопилотов Wookong-H http://www.dji-innovations.com/products/wookong-h/overview/ и Ace One http://www.dji-innovations.com/products/aceone/overview/, а особенно DJI-Innovations приуспела в создании систем для мультироторных систем Wookong-M и Naza-M. И после появления в продаже новинки от DJI я заказал автопилот Naza-H DJI Naza H, GPS, and BEC Combo
Что в комплекте: контроллер Naza-H, регулятор напряжения и GPS-антенна с компасом. Все это приходит в виде набора отдельных коробочек.
Контроллер включает трех-осевой гироскоп, трех-осевой акселерометр и барометр.

Naza-H может работать в трех режимах:
Ручной режим (manual mode).
Режим стабилизации (Atti. mode).
Режим стабилизации c GPS (GPS Atti. mode).
Если не подключать GPS, то будут доступны только два режима.
Еще следует отметить, что система позволяет работать на вертолетах как с флайбаром (FB), так и с бесфлайбарной (FBL).
Платформой для установки послужил HK600, претерпевший массу модернизаций, в частности последняя переделка была связана с установкой нового основного ротора DFC , писал об этом тут http://www.parkflyer.ru/38737/blogs/view_entry/229/. После нескольких удачных полетов вертолет был отправлен на зимние каникулы, но не тут-то было, каникулы были нарушены.
Контроллер был установлен внутри рамы на специальную площадку с помощью тонкого двухстороннего скотча, как рекомендует производитель. Гироскоп и акселерометр установлены внутри корпуса на специальной виброгасящей платформе, поэтому применение толстого скотча не обязательно.
Индикатор вынесен на левый бок вертолета. Сверхяркий светодиод сигнализирует о режимах работы системы. Он же является и интерфейсом USB.
GPS антенна c магнитным компасом фиксируется на хвостовую балку вертолета специальным хомутом.
DJI для удобства пользователей системы подготовила инструкцию http://download.dji-innovations.com/downloads/naza-h/en/NAZA-H_quick_start_guide_v1.06_en.pdf и видео инструкции по подключению
, а также по настройке через Assistant Software
Это позволило выполнить все настройки.
Первый тестовый полет закончился неудачей. Все произошло в считанные секунды. Резкий крен влево при взлете, даже ничего сделать не успел, только холд дернул в последний момент. Основная лопасть в минус, а также подрубило балку, у одной тяги лопнул наконечник, погнуло вал, крепление GPS улетело в неизвестном направлении, а сама антенна болталась на проводе, из блока разъем от GPS вывалился. Хвост держал в момент взлета, чувствительность ставил 40.
Краш произошел из-за настроек, когда аппаратуру настраивал, поставил реверс - вот и результат, надо быть внимательнее.
Крепление GPS антенны я так и не нашел, поэтому сделал его сам и разместил его рядом с хвостовой сервой. Честно сказать, производитель не рекомендует так устанавливать антенну, но и ставить под удар лопасти дорогую антенну не разумно.

После проведения ремонтно-восстановительных работ, многократных проверок совершил пробный полет. Взлетал в ручном режиме. При висении наблюдался небольшой дрейф, характерный для вертолетов. Автотриммирование не производил, решил оставить на потом. Переход в режим ATTI был незаметным, вертолет стал как бы вялым, с неохотой реагировал на стики. Очень напоминает вертолет соосной схемы. При переходе в режим стабилизации с ГПСом, вертолет завис над точкой с небольшими отклонениями. Хвост держит отлично, подстраивать чувствительность пока не стал, оставил 40%.Одним словом все очень понравилось, теперь буду производить более тонкие настройки.

Приведу один видео ролик, который наиболее полно демонстрирует возможности Naza-H
После пополнения ангара вертолетом Align Trex 600E Pro DFC, о котором я уже писал в своем дневнике http://www.parkflyer.ru/38737/blogs/view_entry/1187/ , решил установить систему на него.

На стандартное место для установки гироскопа контроллер поместился с трудом. Зачем производитель сделал переднюю кромку с возвышающимся бортиком не понятно. Пришлось клеить несколько слоев двухстороннего скотча, ну а если координально поступить, то сточить выступ напильником.

Контроллер установил в противоположном направлении, так как размещение проводов иначе затруднительно. Смысл применения таких больших разъемов для коммутации индикатора и GPS не ясен, отсутствие защелок-фиксаторов в разъемах я считаю минусом.

Так как к контроллеру подходит очень много проводов, то он постоянно норовит отклеиться, поэтому для надежности закрепил липучкой.
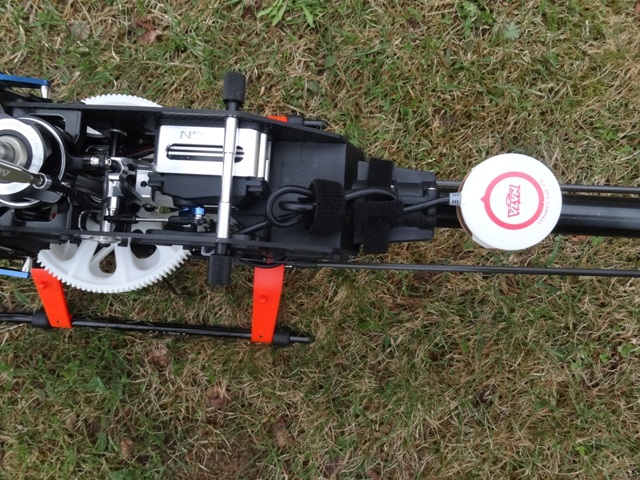
Наученный предыдущим опытом, антенну GPS я закрепил в самом начале хвостовой балки. Так как хвостовая серва находится внутри рамы, то антенну сдвинул к самому основанию. Фиксатор сделал из крепления подкосов хвостовой балки, закрепив его набоку, для того чтобы можно было быстро снять для установки на другой вертолет. На качество приема сигнала такое расположение никак не повлияло.

Настроить систему не составило большого труда после зимних экспериментов.
Видео первого полета Trex 600E Pro DFC Naza-H GPS. Взлет в ручном режиме, переход в режим стабилизации, полет в режиме GPS, посадка в ручном режиме.
После первого полета скачал с регулятора лог-файл.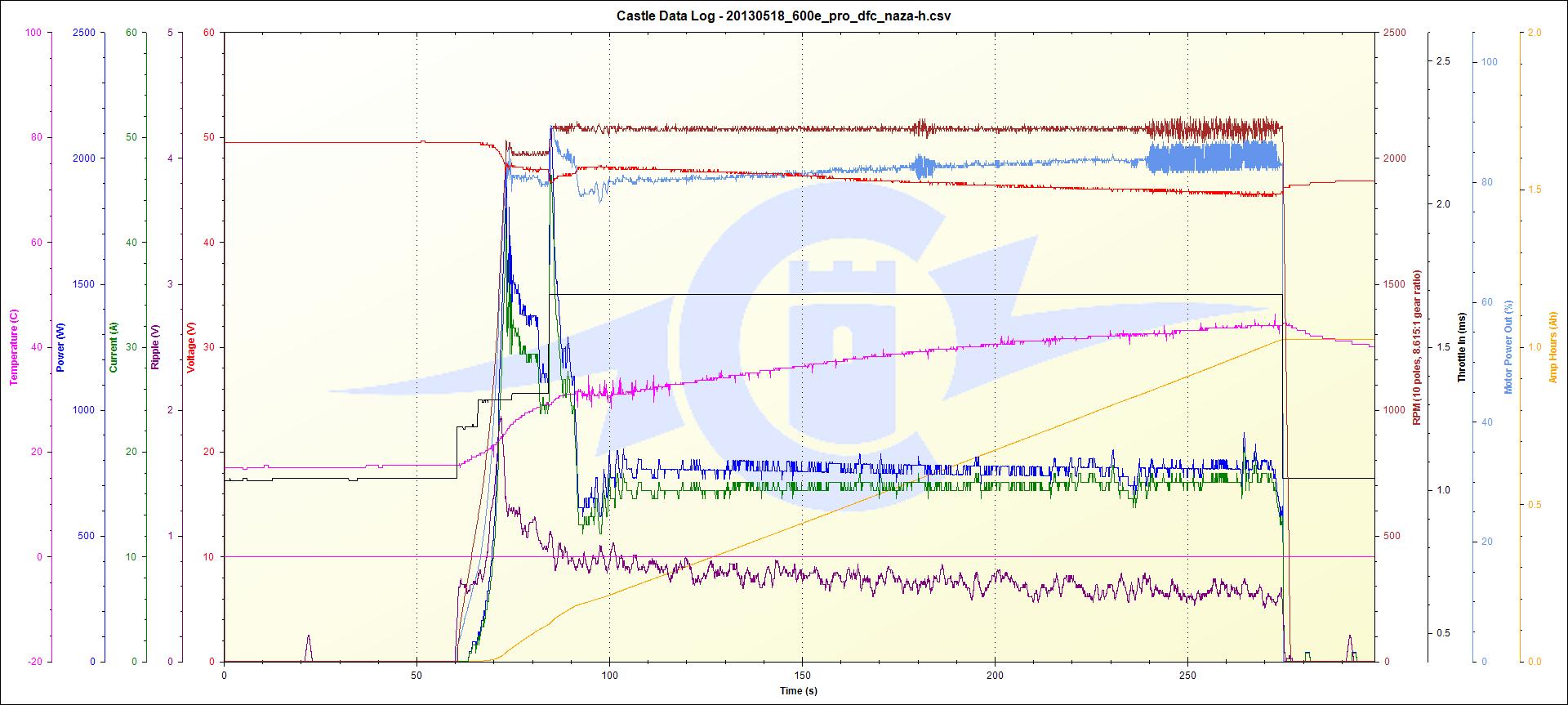
На графике видно, что система не нагружает силовую установку. После взлета и перехода в режим стабилизации система фиксирует сигнал по каналу газа и держит заданную полку. Появление колебаний характеристик в конце графика связано с изменением режима полета.
Видео второго полета Trex 600E Pro DFC Naza-H GPS. Взлет в ручном режиме, посадка в режиме стабилизации.
На видео видно, что вертолет достаточно стабильно себя ведет, в режиме стабилизации наблюдается небольшой дрейф в сторону. Дрейф надеюсь победить с помощью функции autotrim. В режиме стабилизации с GPS-ом вертолет висит в точке без существенных отклонений. Полет тоже стабильный, ровный.
Какое может быть практическое применение данной системы:
Полеты по FPV.
Фото-видеосъемка.
Система стабилизации для моделей-копий.
Надеюсь, что с течением времени разработчики реализуют возврат домой (RTH) и управление подвесом камеры (соответствующие выходы для подключения предусмотрены), как это сделано в мультироторной модификации Naza-M.













А как сейчас "НАЗА" поживает.
Не подскажите ее есть смысл ставить на 450 верт (без сервооси)?
Вопрос - что будет при пропадании сигнала управления (отключения передатчика) во время полёта ?
(при установленном GPS и при движении модели в горизонтальной и вертикальной плоскостях, на момент пропадания сигнала). Модель действительно остановится, в точке пропадания сигнала и будет ждать появления сигнала ?
Спасибо.
Вертушка 700ка от TZ.
Подскажите пожалуйста автоматический взлет посадка и встроенный гувернер у "наза" или "вуконг"?
Большого смысла в системе нет, имхо.
Датчик GPS - это опция, которую можно не покупать. Каждый может выбрать комплектацию под свои потребности. В данной ценовой категории конкурентом с режимом автовыравнивания может выступать только MSH Brain (еще есть аналог Ikon), остальные значительно дороже.
А автовыравнивание на верте не нужно.