Купил как-то квадрик syma x5c  Original SYMA X5C 2.4G RC Drone with camera Quadcopter SYMA-X5C RC Helicopter Copter Brushless Motor
Original SYMA X5C 2.4G RC Drone with camera Quadcopter SYMA-X5C RC Helicopter Copter Brushless Motor
 Товар http://www.parkflyer.ru/product/1784155/
для полётов во время выезда на шашлык/пляж с возможностью поснимать видео. Кстати, для игрушки аппарат весьма неплох. Лёгкое управление и неубиваемость за сносные деньги, да и в квартире места для полётов ему хватает. Прочность конструкции была проверена не обычным способом. Дело в том, что есть один жирный минус – дальнобойность аппаратуры. 30 – 40 м – ПРЕДЕЛ! После выхода за эту дистанцию квадрик около секунды выполняет последнюю команду и падает. В моём случае был набор максимальной высоты, где после потери сигнала он перевернулся и упал винтами в землю (на газон) совершенно без последствий!
Товар http://www.parkflyer.ru/product/1784155/
для полётов во время выезда на шашлык/пляж с возможностью поснимать видео. Кстати, для игрушки аппарат весьма неплох. Лёгкое управление и неубиваемость за сносные деньги, да и в квартире места для полётов ему хватает. Прочность конструкции была проверена не обычным способом. Дело в том, что есть один жирный минус – дальнобойность аппаратуры. 30 – 40 м – ПРЕДЕЛ! После выхода за эту дистанцию квадрик около секунды выполняет последнюю команду и падает. В моём случае был набор максимальной высоты, где после потери сигнала он перевернулся и упал винтами в землю (на газон) совершенно без последствий!
Но однажды в багажнике его придавило грузом, да так, что один из лучей не выдержал и переломился. Всё – списание.

Original SYMA X5C 2.4G RC Drone with camera Quadcopter SYMA-X5C RC Helicopter Copter Brushless Motor Товар http://www.parkflyer.ru/product/1784155/
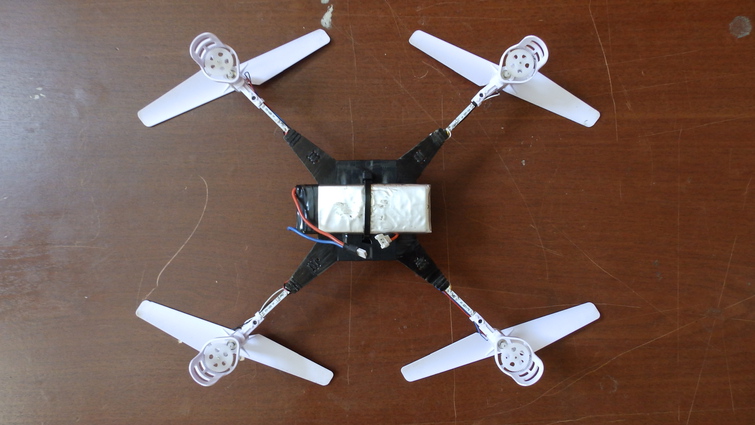
для полётов во время выезда на шашлык/пляж с возможностью поснимать видео. Кстати, для игрушки аппарат весьма неплох. Лёгкое управление и неубиваемость за сносные деньги, да и в квартире места для полётов ему хватает. Прочность конструкции была проверена не обычным способом. Дело в том, что есть один жирный минус – дальнобойность аппаратуры. 30 – 40 м – ПРЕДЕЛ! После выхода за эту дистанцию квадрик около секунды выполняет последнюю команду и падает. В моём случае был набор максимальной высоты, где после потери сигнала он перевернулся и упал винтами в землю (на газон) совершенно без последствий!Но однажды в багажнике его придавило грузом, да так, что один из лучей не выдержал и переломился. Всё – списание.

Последнее время жизнь «бьёт ключом», да так сильно, что на хобби время нет, и все начатые проекты легли на полки до лучших времён.
Но в один субботний день время нашлось, и я решил использовать то, что осталось от symы для эксперимента.
Цели эксперимента:
1. изготовление новой рамы с уменьшением веса при сохранении габаритов
2. попытка установить FPV
3. перевести питание на 2S LiPo (как следствие из п.2)
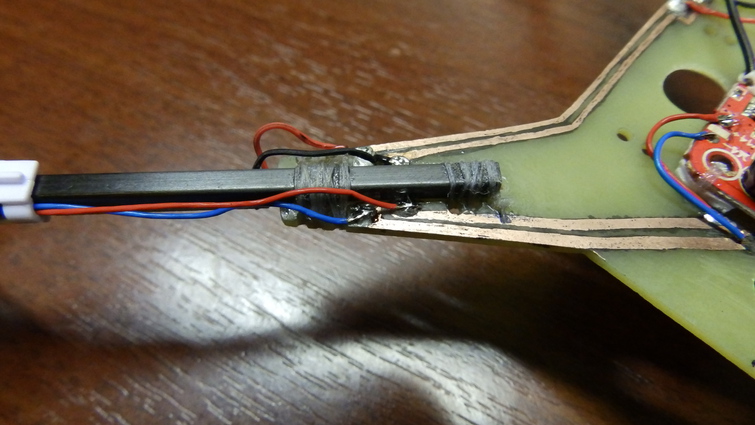
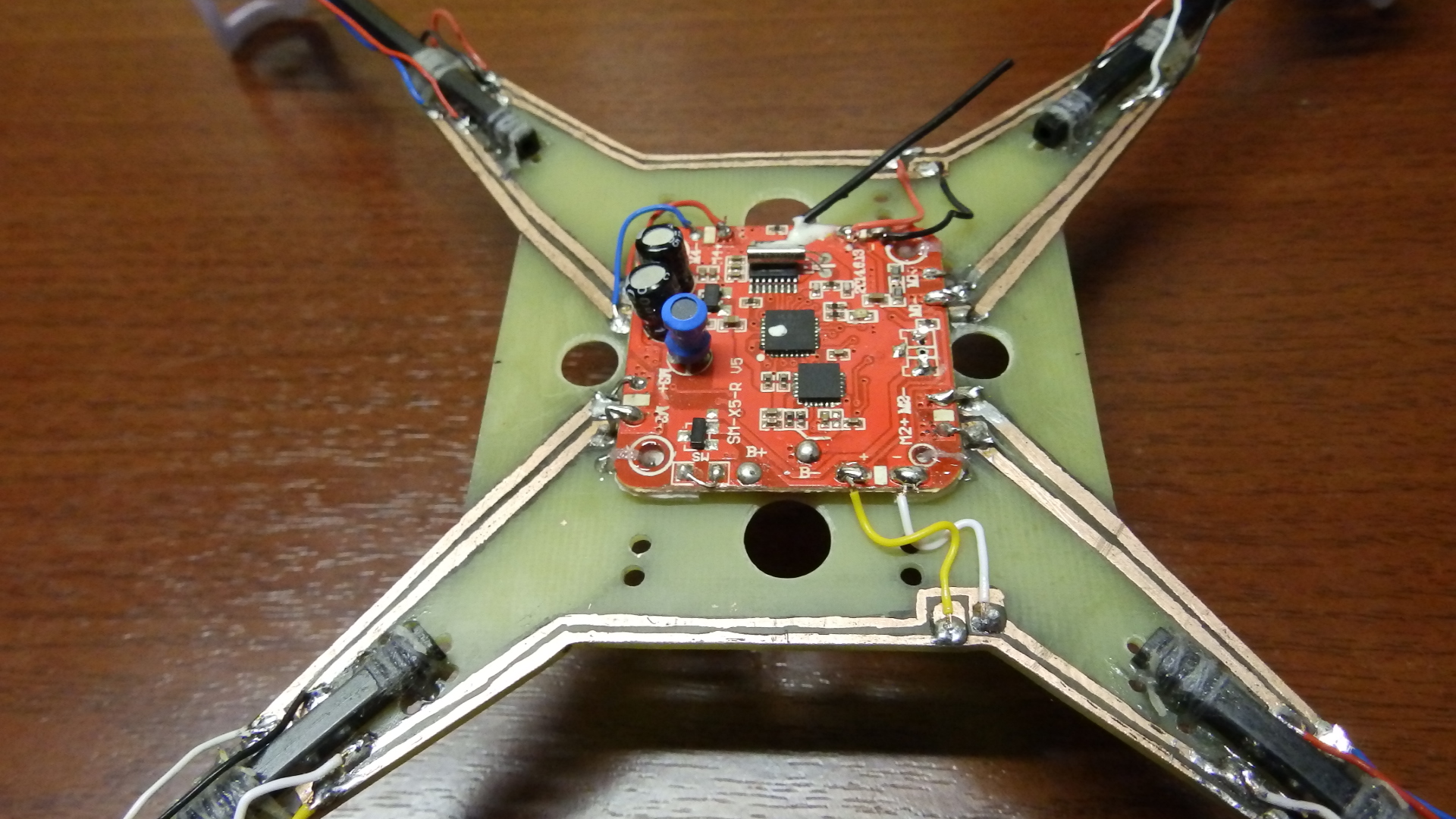
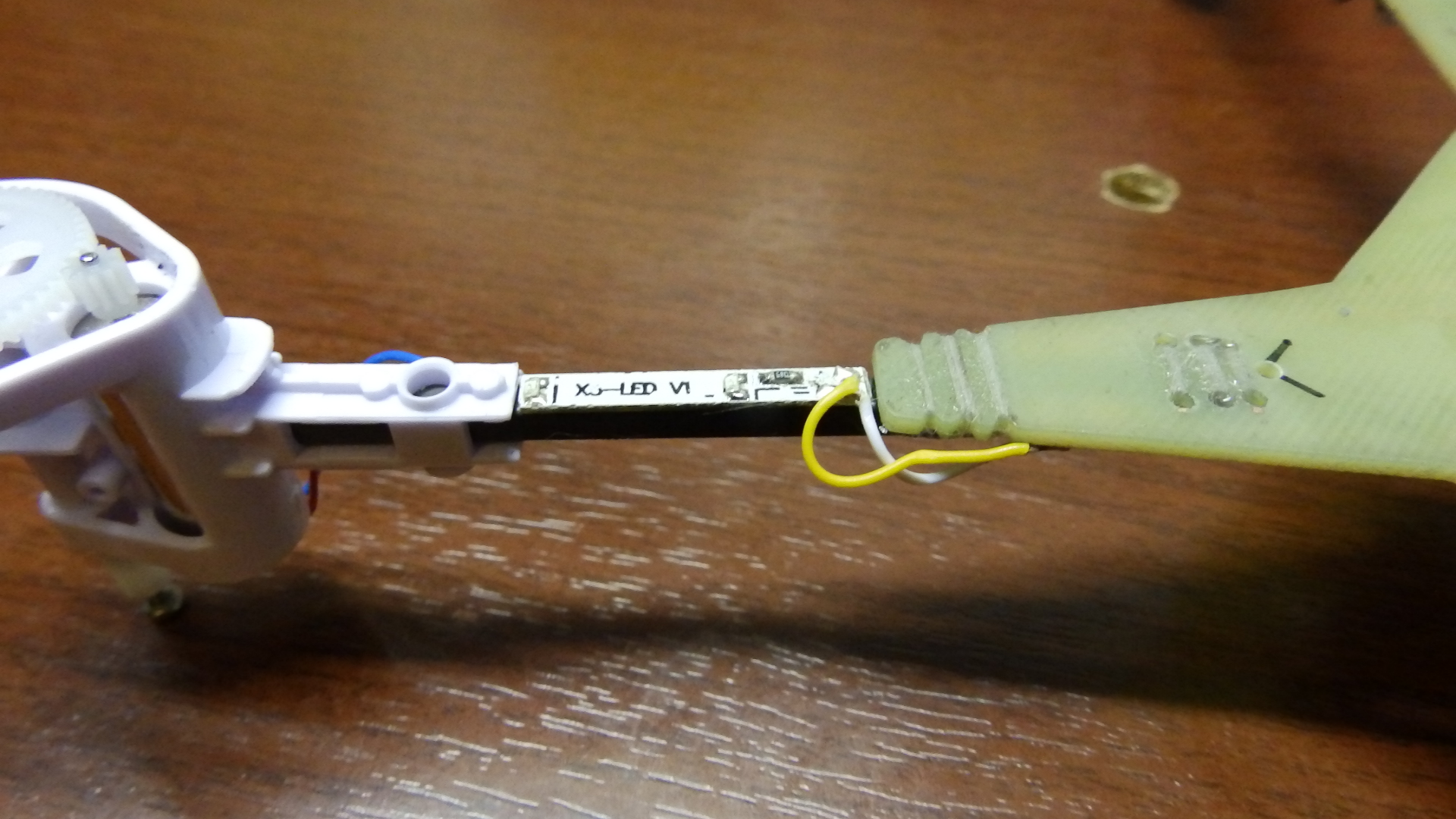
С рамой было просто. После извлечения начинки оказалось, что моторама унифицирована с квадриками, где в качестве лучей использованы углеволоконные бруски с стороной 3мм.
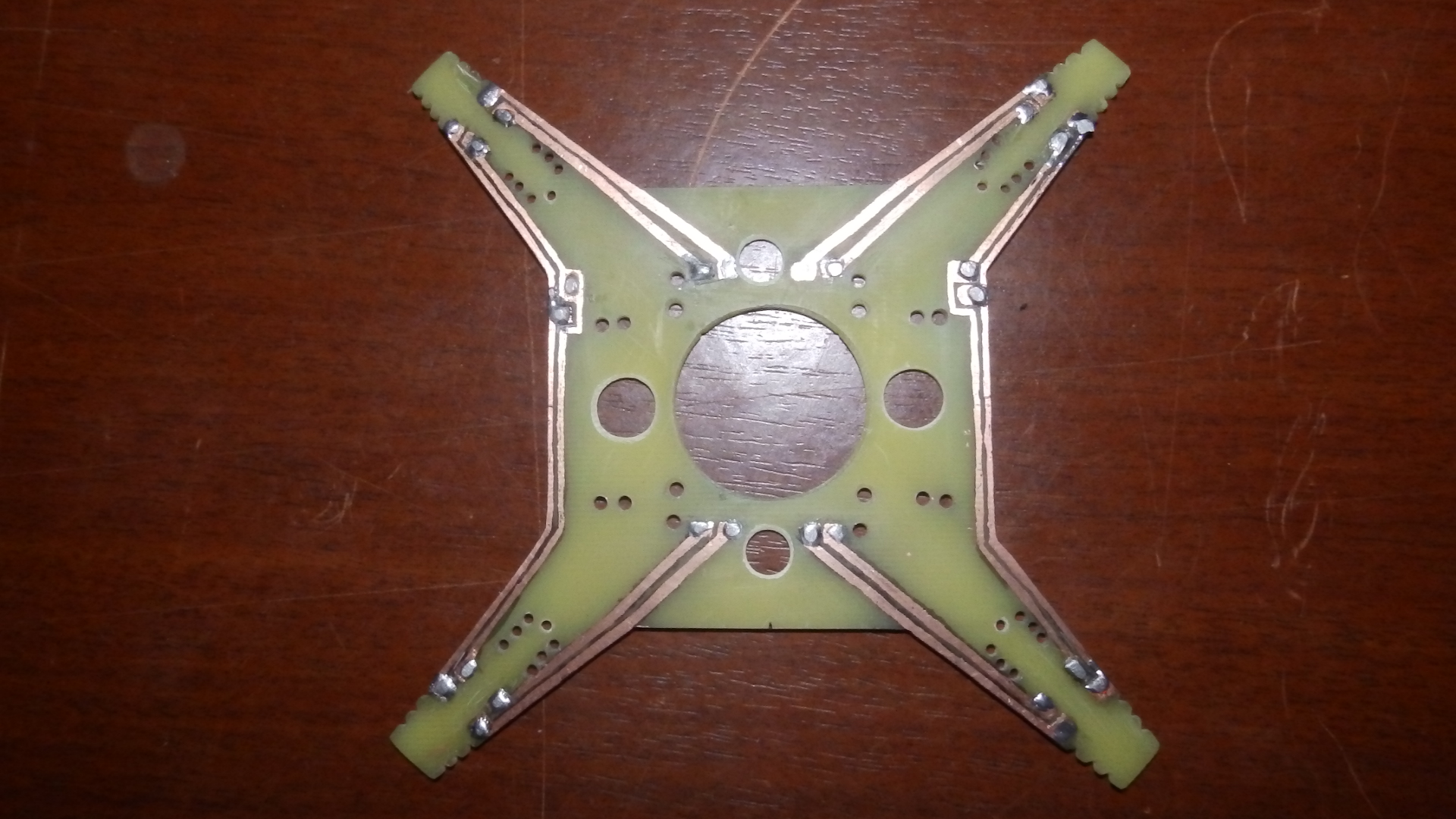
Сама рама была выпилена из текстолита для плат, с последующим изготовлением токопроводящих дорожек для запитки подсветки и моторов. К этой раме были приклеены эпоксидкой углеволоконные лучи с фиксацией нитью.
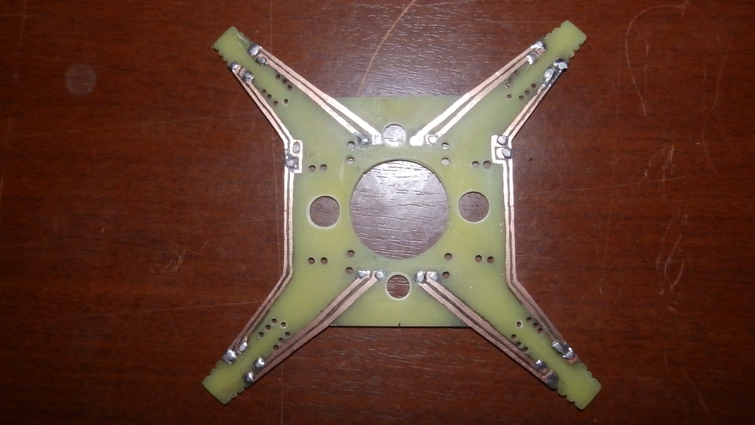

Выигрыш в весе был очевиден.

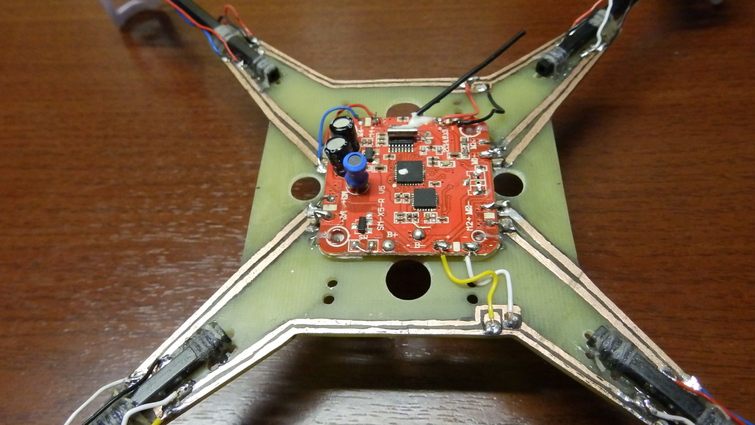
После монтажа начинки вес с батареей был на 55г меньше чем у донора.


В полёте всплыл неожиданный недостаток – слишком малый вес. Едва касаешься стика газа, как квадрик уходит вверх. Висеть просто невозможно.
Пришло время догружать.
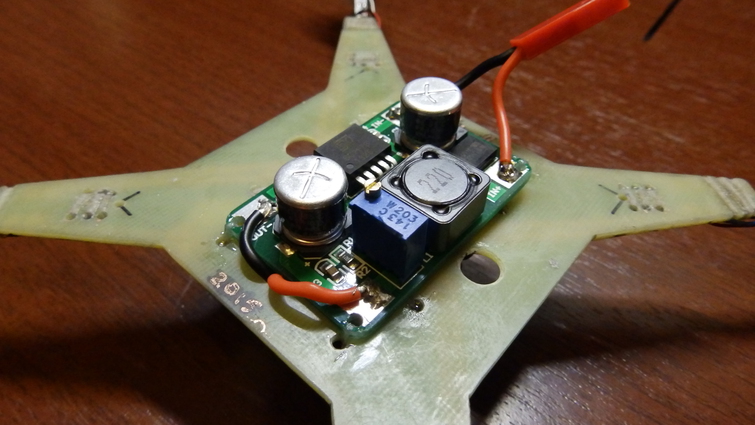
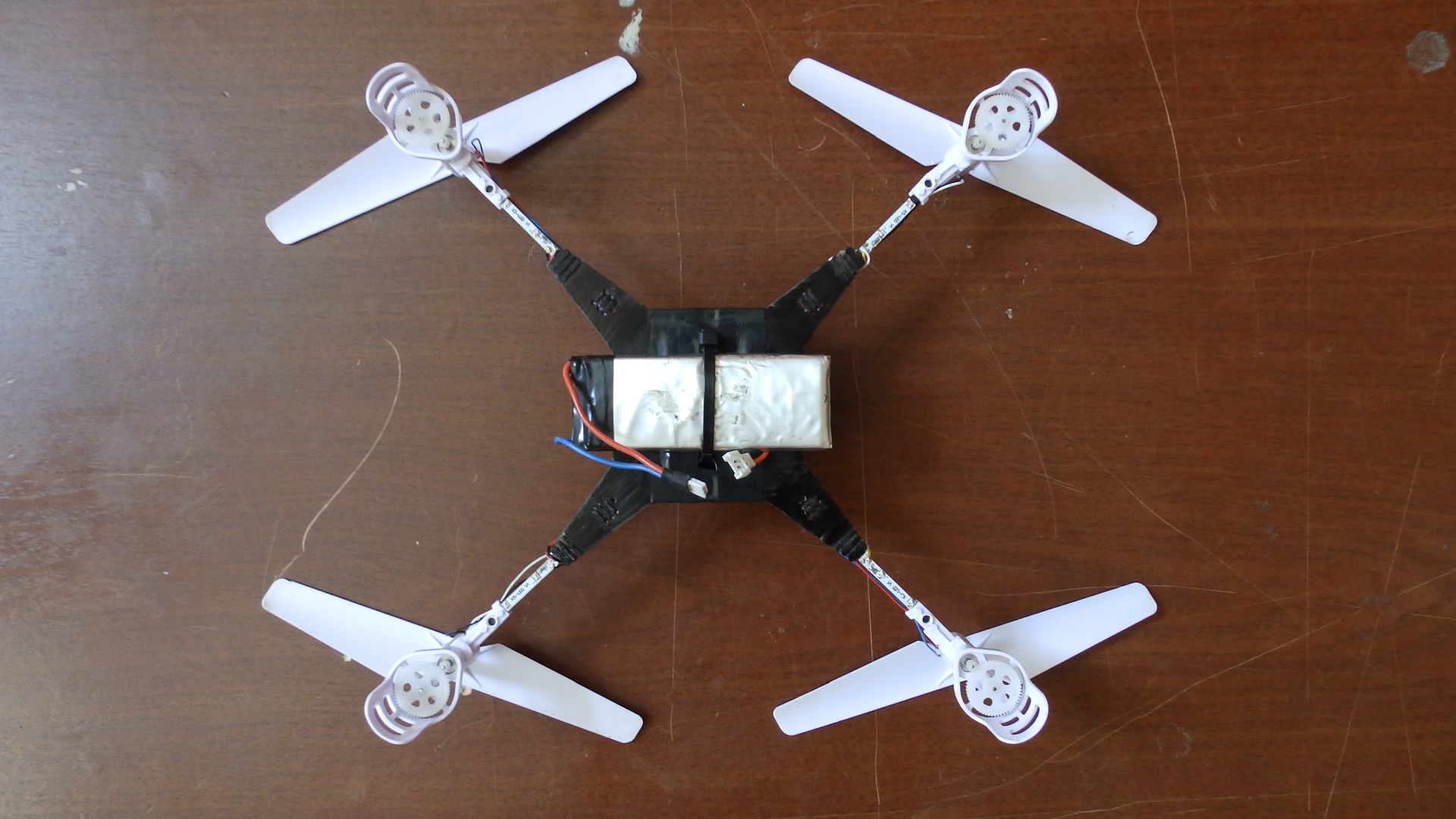
Да, я знаю, что есть передатчики видео, работающие от 3,7V, но у меня есть только на 200 mW с минимальным входным напряжением 6V (вес 16 г.). Да, я знаю, что преобразователи напряжения бывают меньше, чем есть у меня (вес 25 г.). Да и 2S LiPo батарея у меня была на 800 мАч (вес 45 г.).
В итоге вес квадрика перевалил за 135 г. – почти предел.
Но ведь это всего лишь эксперимент.
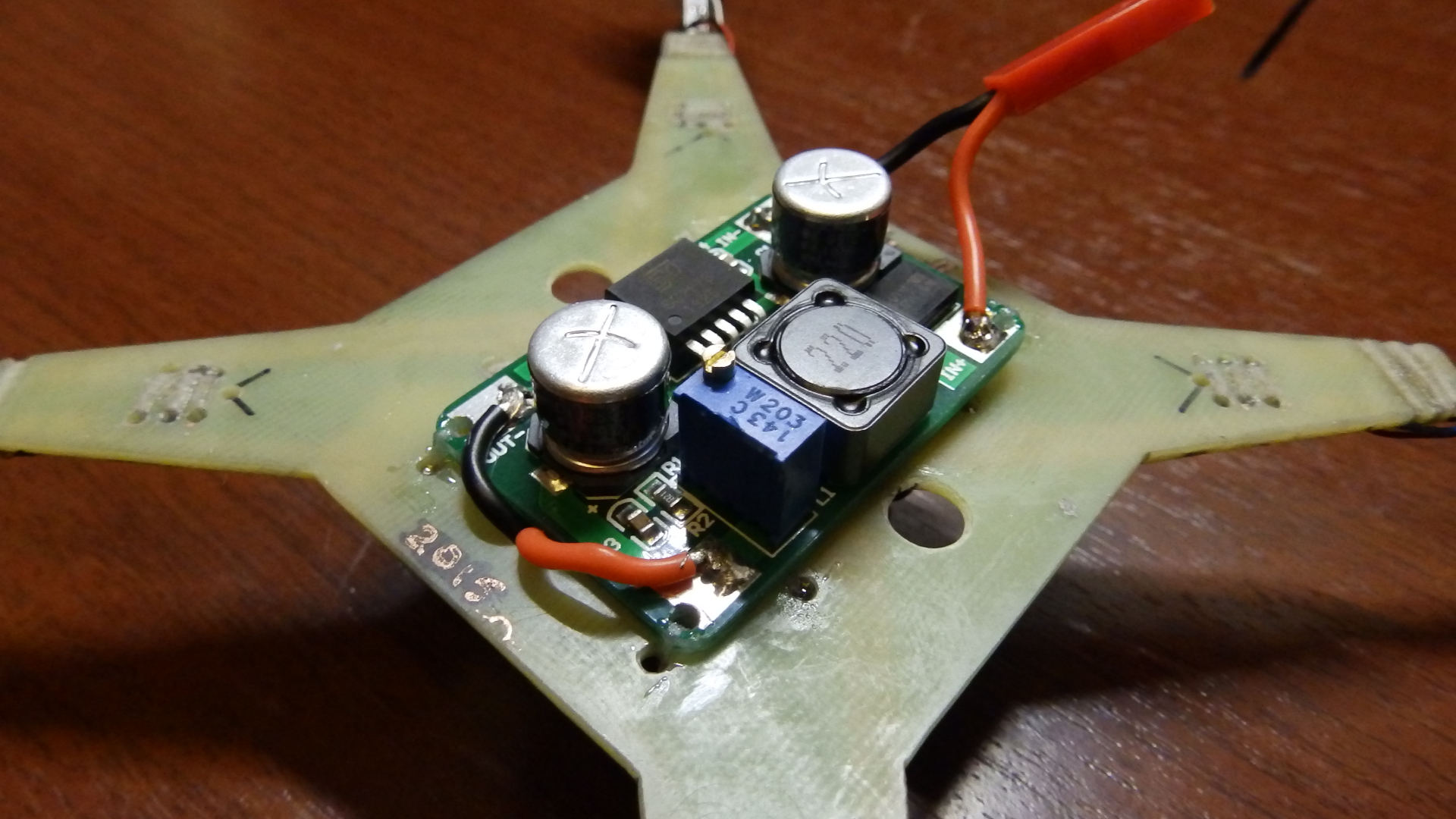
Импульсный понижающий преобразователь с регулируемым выходным напряжением (я выставил 4V) питал электронику квадрика, а видео передатчик питался на прямую от батареи.
Управление газом с преобразователем понятнее, так как на выходе постоянное напряжение, но есть и нюанс – не срабатывает встроенная защита от критического разряда батареи. А пищалка – это плюс дополнительные граммы.
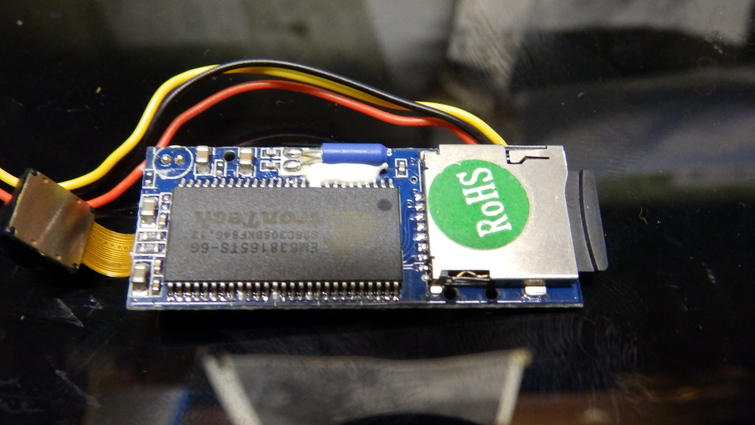
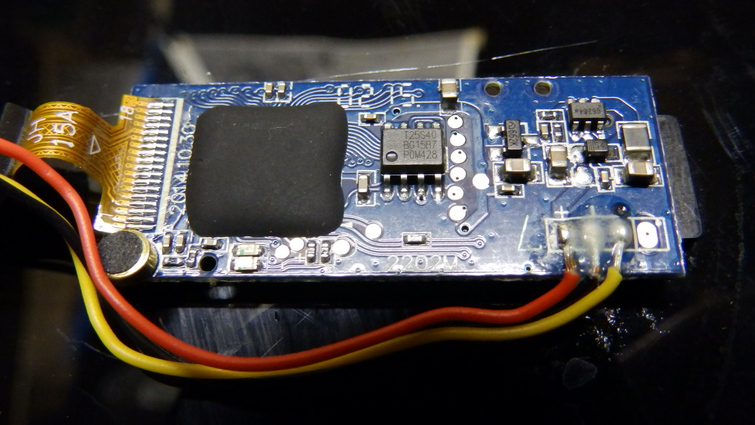
Камерой послужил мини видео регистратор после удаления встроенной батареи и корпуса (вес до 2-х г.). Его плюс был в малом весе, записью HD видео на micro SD, и передача AV сигнала через USB выход.
Но по камере летать не получилось. Увеличившаяся масса и уехавший вниз ц.т. сделали невозможным зависание. Система стабилизации квадрика не могла слабыми моторами удержать равновесие. Коптер трясло как в судороге, что полностью дезориентировало.
Эксперимент частично провален. Борт вновь запитан от 3,7 V батареи, но уже 1400 мАч. И возвращена штатная камера, закреплённая изолентой.

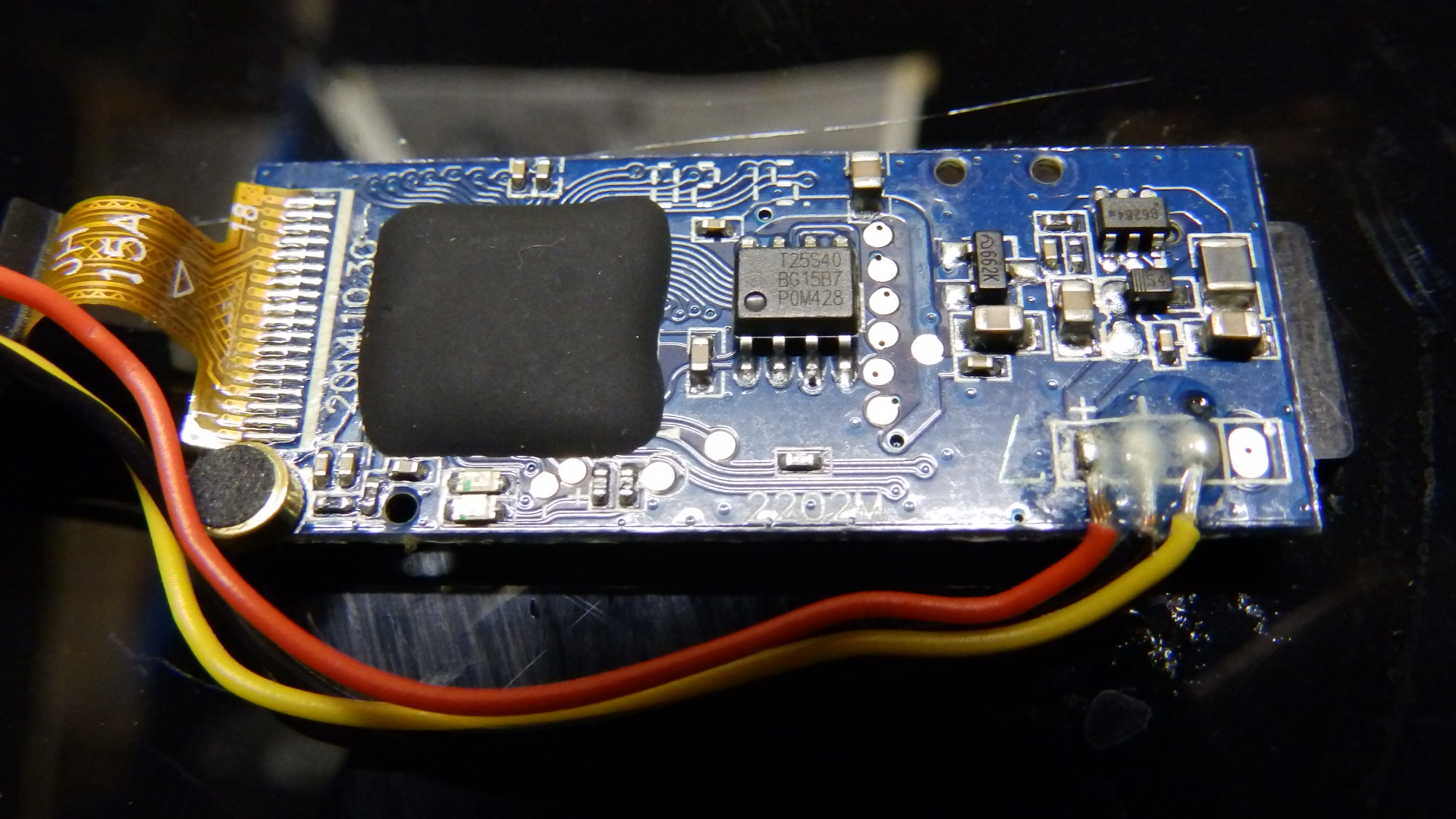
Вопрос знатокам: Есть ли у штатной камеры АV выход и как включить запись без использования передатчика. Фото камеры ниже.
Но в один субботний день время нашлось, и я решил использовать то, что осталось от symы для эксперимента.
Цели эксперимента:
1. изготовление новой рамы с уменьшением веса при сохранении габаритов
2. попытка установить FPV
3. перевести питание на 2S LiPo (как следствие из п.2)
С рамой было просто. После извлечения начинки оказалось, что моторама унифицирована с квадриками, где в качестве лучей использованы углеволоконные бруски с стороной 3мм.
Сама рама была выпилена из текстолита для плат, с последующим изготовлением токопроводящих дорожек для запитки подсветки и моторов. К этой раме были приклеены эпоксидкой углеволоконные лучи с фиксацией нитью.

Выигрыш в весе был очевиден.

После монтажа начинки вес с батареей был на 55г меньше чем у донора.


В полёте всплыл неожиданный недостаток – слишком малый вес. Едва касаешься стика газа, как квадрик уходит вверх. Висеть просто невозможно.
Пришло время догружать.
Да, я знаю, что есть передатчики видео, работающие от 3,7V, но у меня есть только на 200 mW с минимальным входным напряжением 6V (вес 16 г.). Да, я знаю, что преобразователи напряжения бывают меньше, чем есть у меня (вес 25 г.). Да и 2S LiPo батарея у меня была на 800 мАч (вес 45 г.).
В итоге вес квадрика перевалил за 135 г. – почти предел.
Но ведь это всего лишь эксперимент.
Импульсный понижающий преобразователь с регулируемым выходным напряжением (я выставил 4V) питал электронику квадрика, а видео передатчик питался на прямую от батареи.
Управление газом с преобразователем понятнее, так как на выходе постоянное напряжение, но есть и нюанс – не срабатывает встроенная защита от критического разряда батареи. А пищалка – это плюс дополнительные граммы.
Камерой послужил мини видео регистратор после удаления встроенной батареи и корпуса (вес до 2-х г.). Его плюс был в малом весе, записью HD видео на micro SD, и передача AV сигнала через USB выход.
Но по камере летать не получилось. Увеличившаяся масса и уехавший вниз ц.т. сделали невозможным зависание. Система стабилизации квадрика не могла слабыми моторами удержать равновесие. Коптер трясло как в судороге, что полностью дезориентировало.
Эксперимент частично провален. Борт вновь запитан от 3,7 V батареи, но уже 1400 мАч. И возвращена штатная камера, закреплённая изолентой.

Вопрос знатокам: Есть ли у штатной камеры АV выход и как включить запись без использования передатчика. Фото камеры ниже.














Тоже пришлось догружать более емкой батареей, иначе поймать его в стабильном полете не получалось (или резко набирает высоту или падает).
Начинка уже польно похожа на мою x7. Можете размеры винта замерить?
Я свой переделал почти сразу, выкинул корпус, заменил аккум и повесил ее:
Аккум от камеры встроил в общую цепь (в сумме набрал 1,8 АЧ). А проблемы с дальностью частично решил наращиванием провода антенны и завитием его в полукольцо под рамой.