
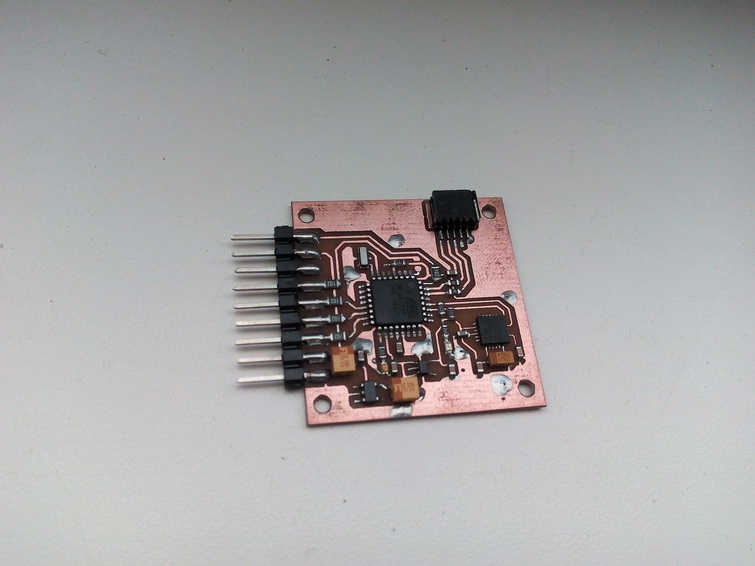
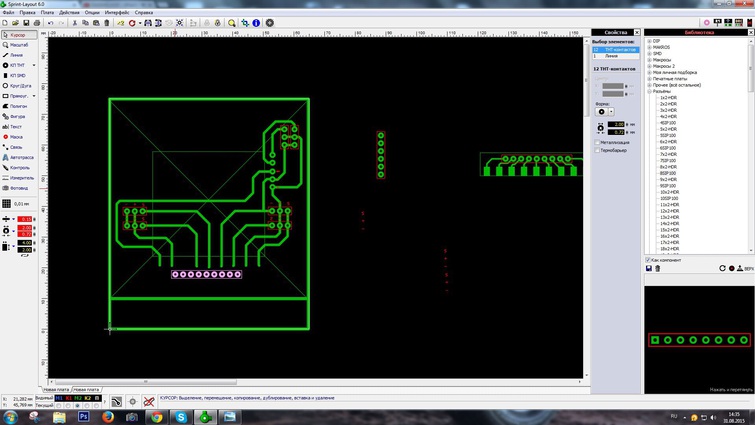
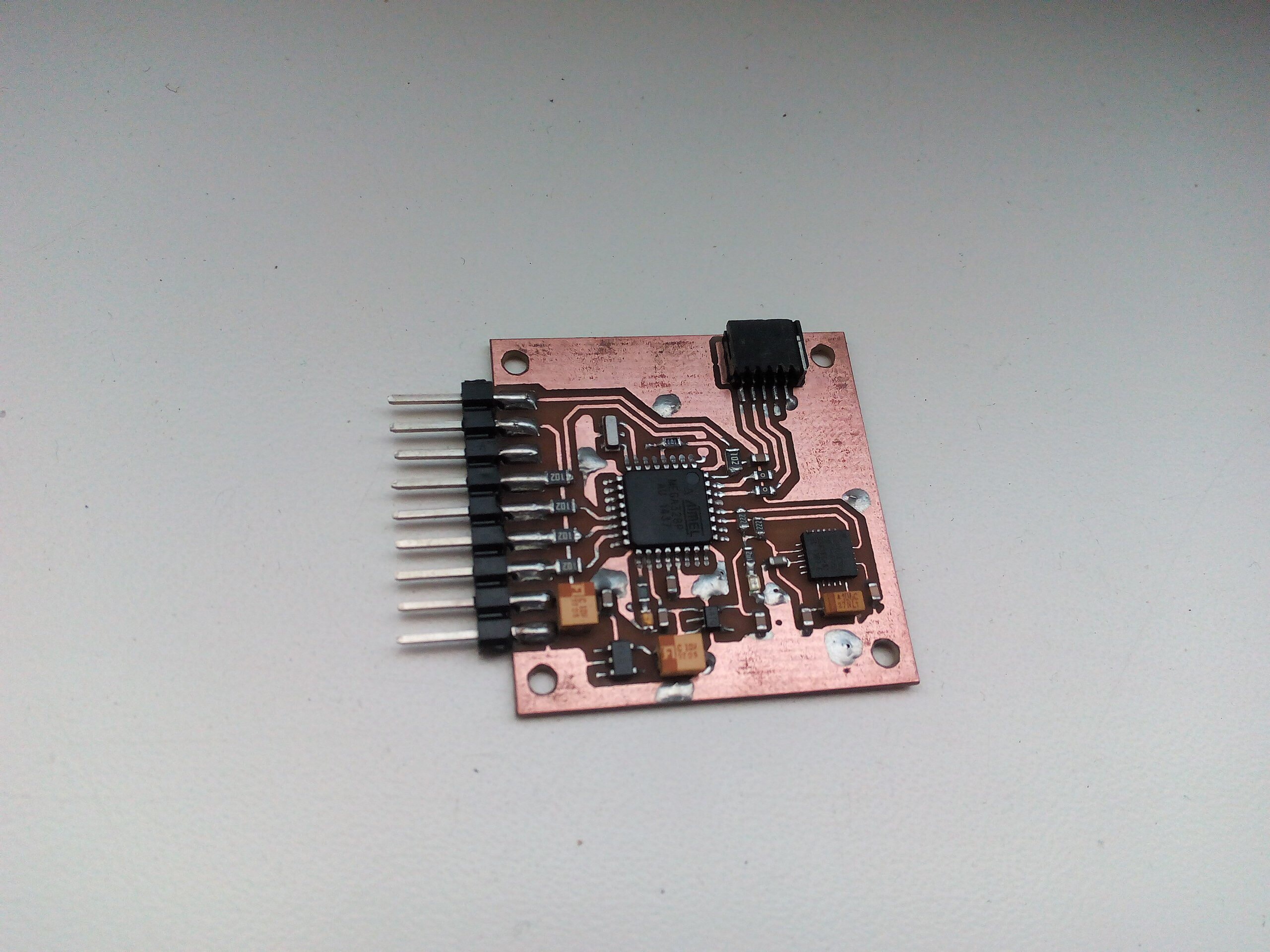
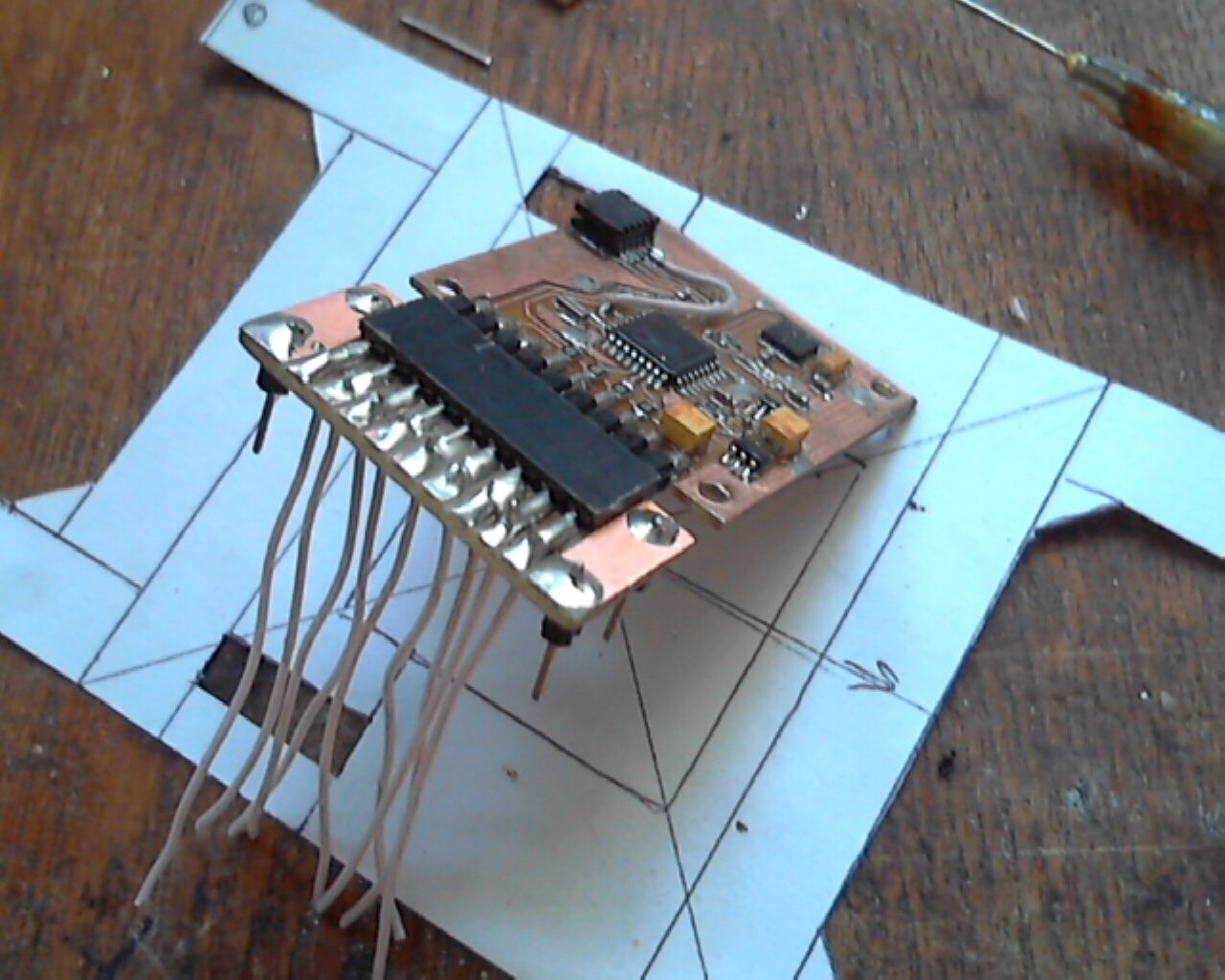
Всем доброго времени суток. Эта статья про бюджетный коптер из частично самодельной электроники, может кому и пригодится) Вообщем за основу была взята рама со старого 450-го квадрика, который на борту имел АПМ 2.5. В качестве мозга была спроектирована и собрана простая мультивиха на одних гироскопах.

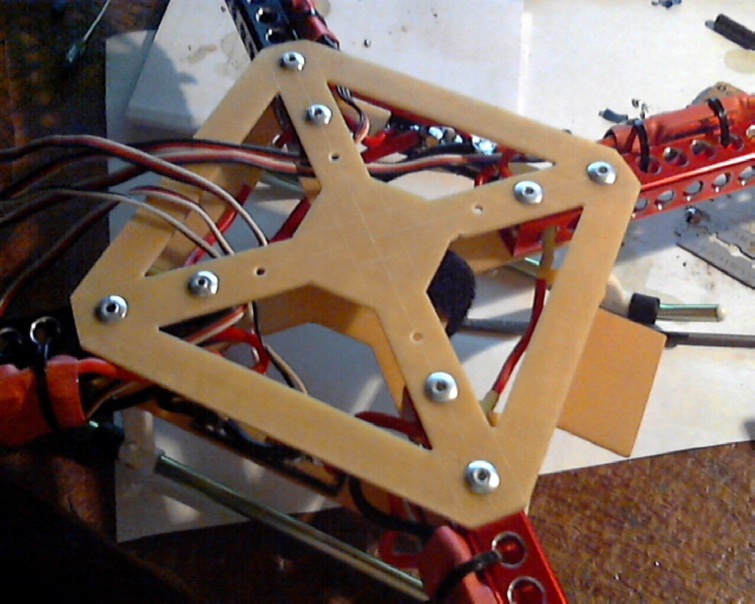
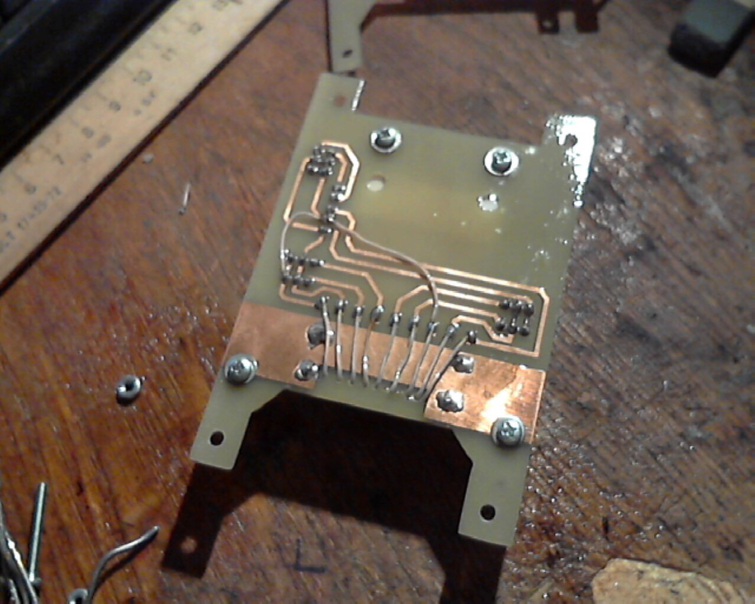
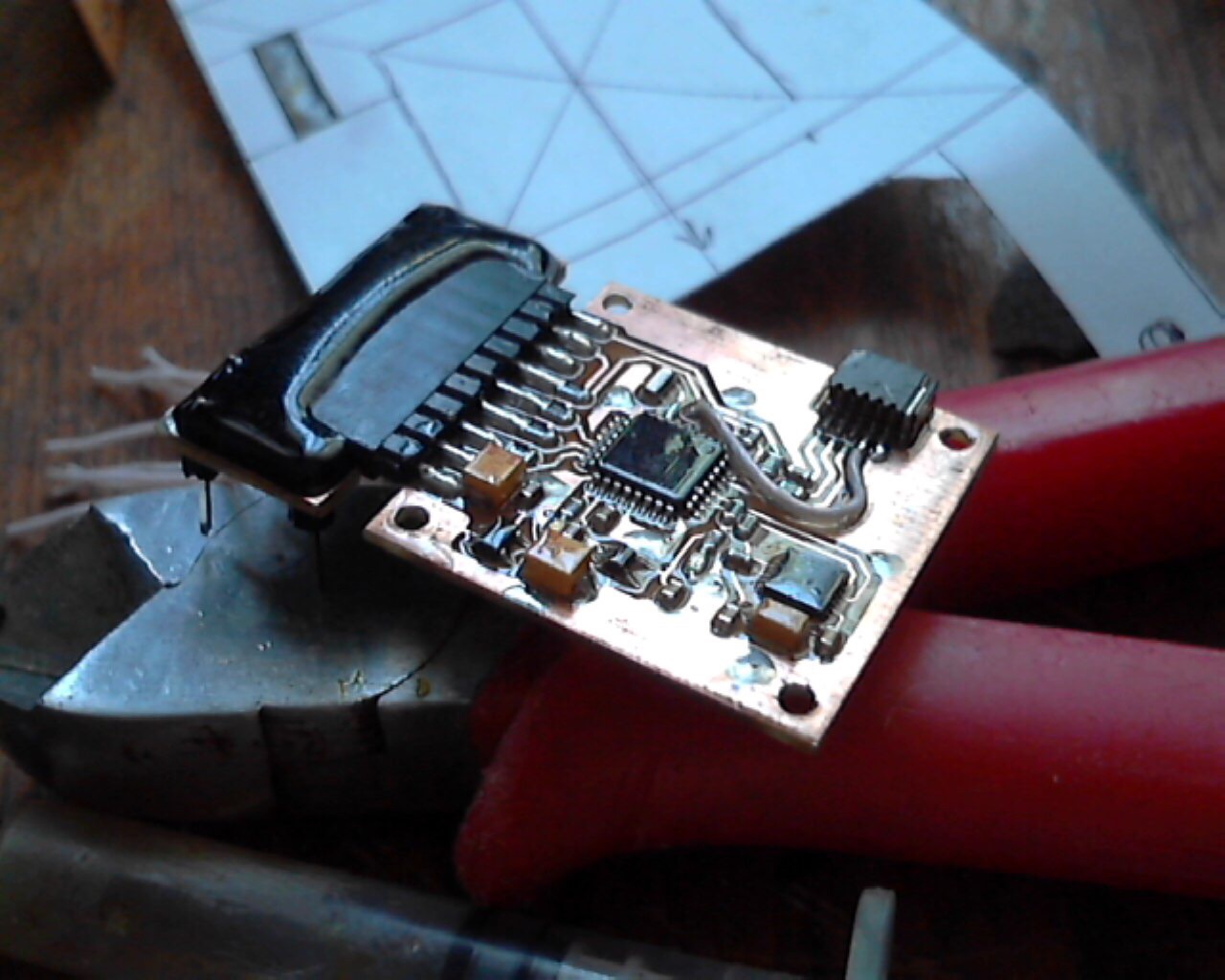
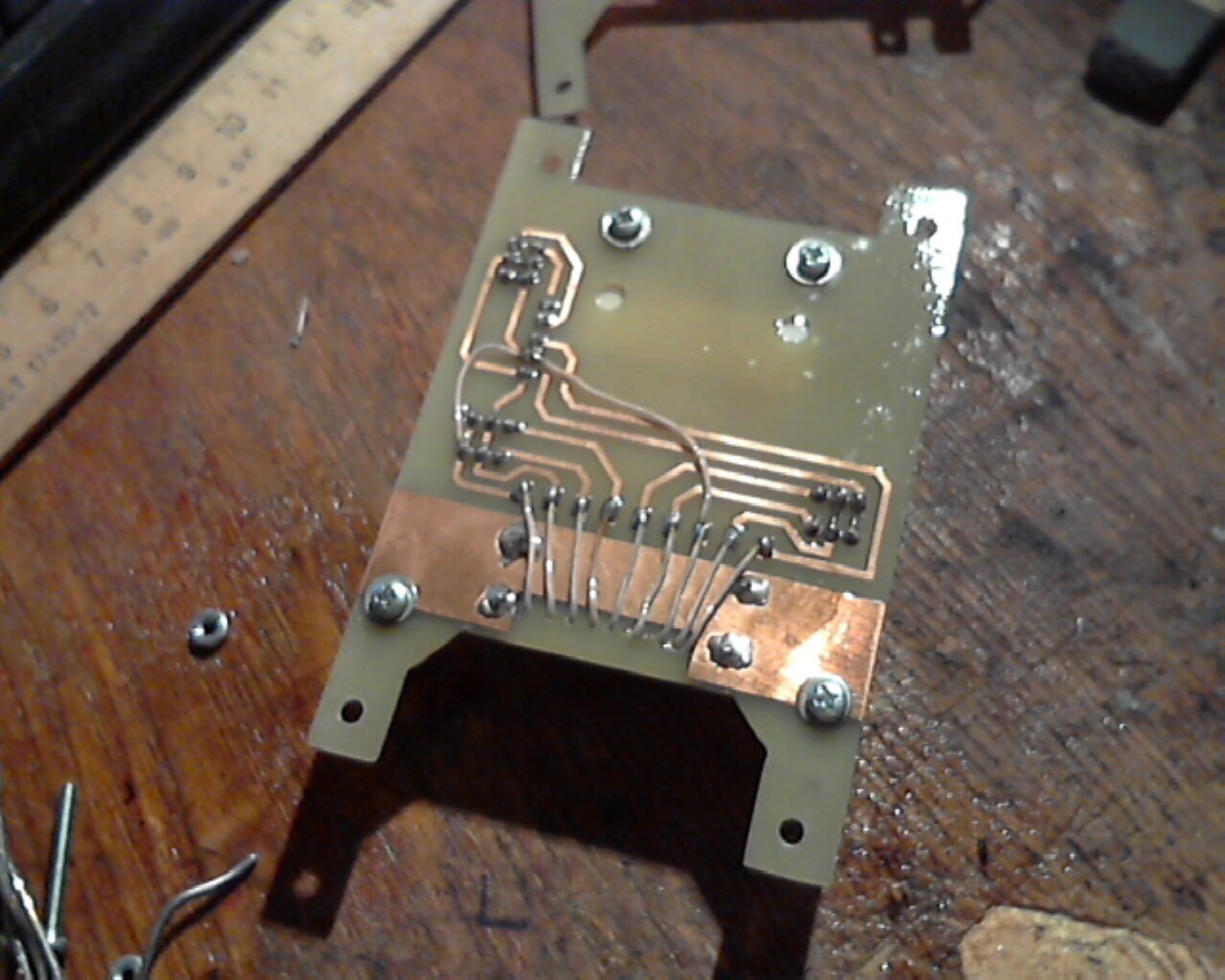
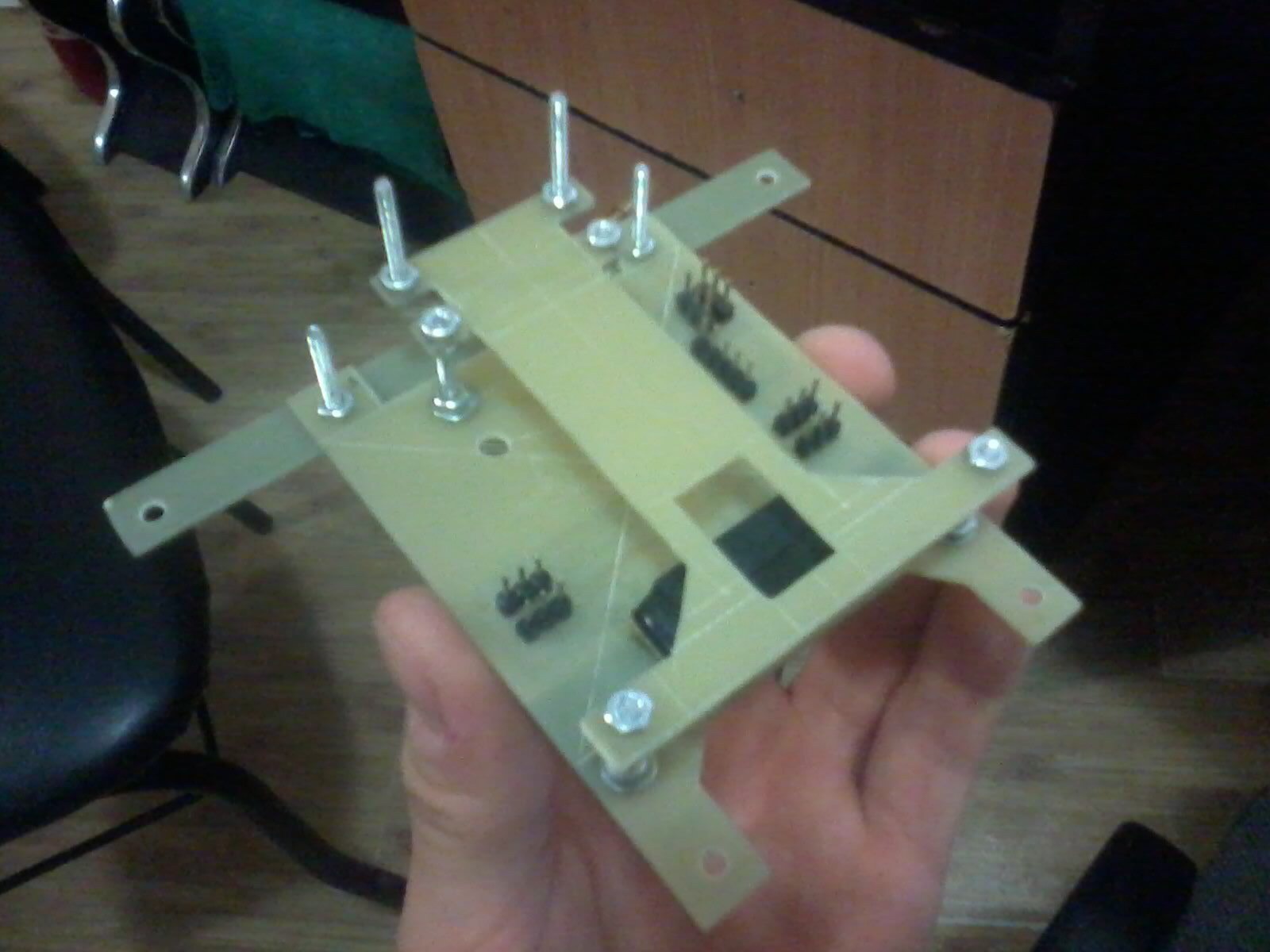
Желание избавится от лишних проводов натолкнуло к мысли о нестандартной конструкции деталей рамы, задумал чтоб мозг подключался к раме не сложнее чем флешка к компьютеру. Изготовил следующее:

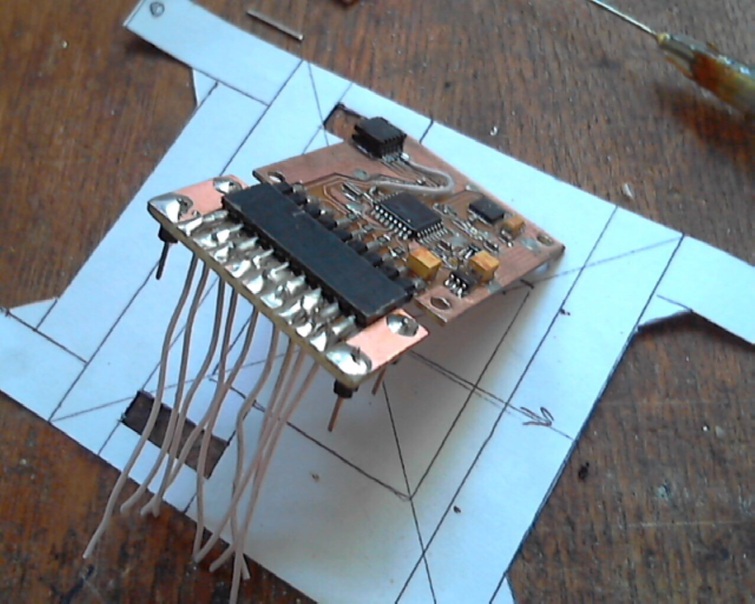
Вывел разъемы подключения приемника и моторов, два дополнительных на разные безделушки.

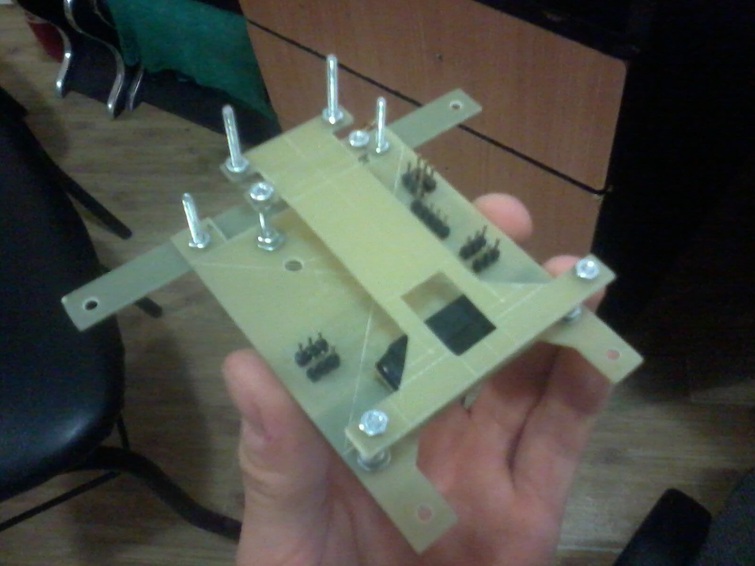
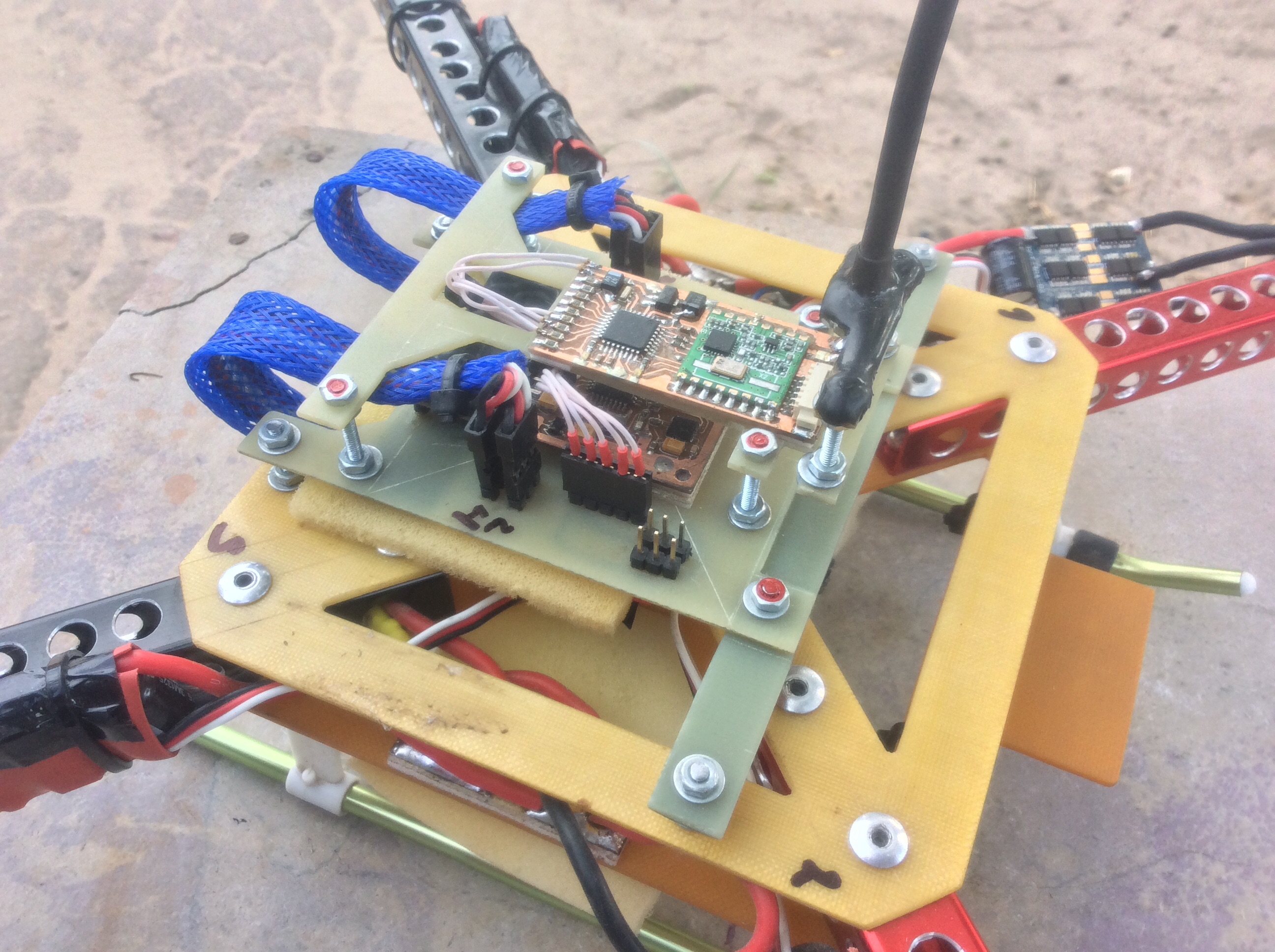
На втором этаже поселится приемник.
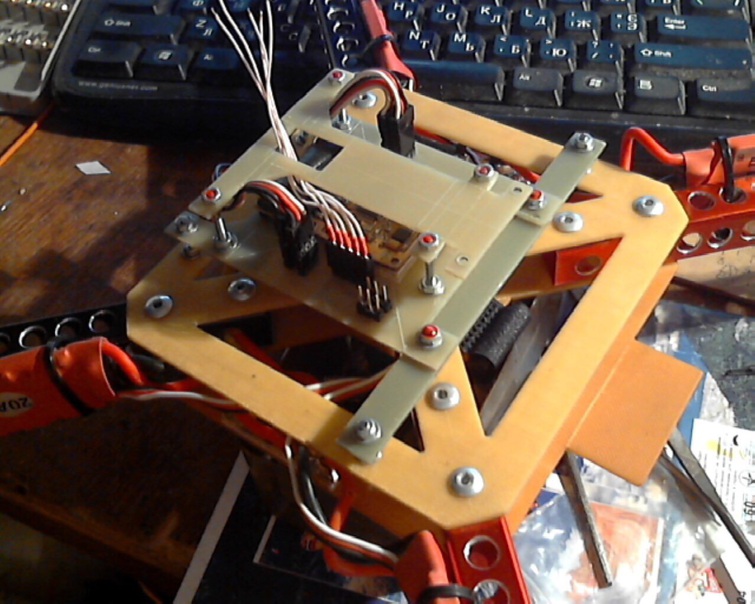
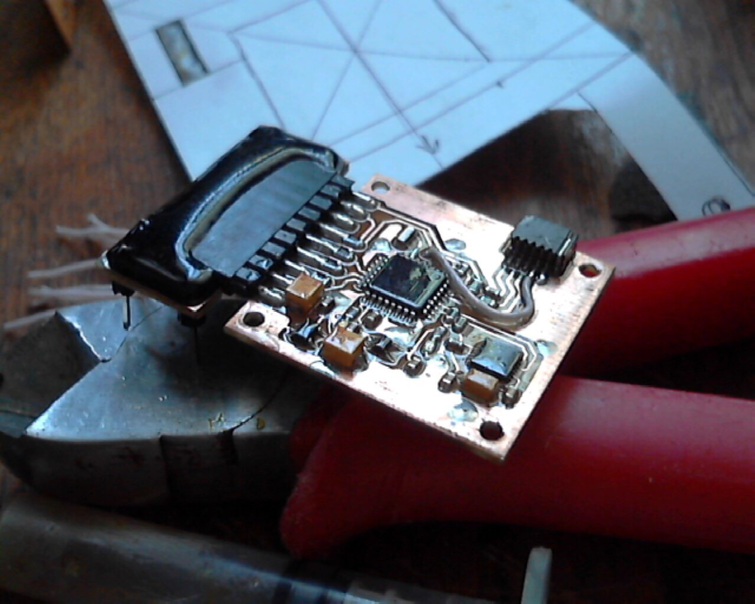
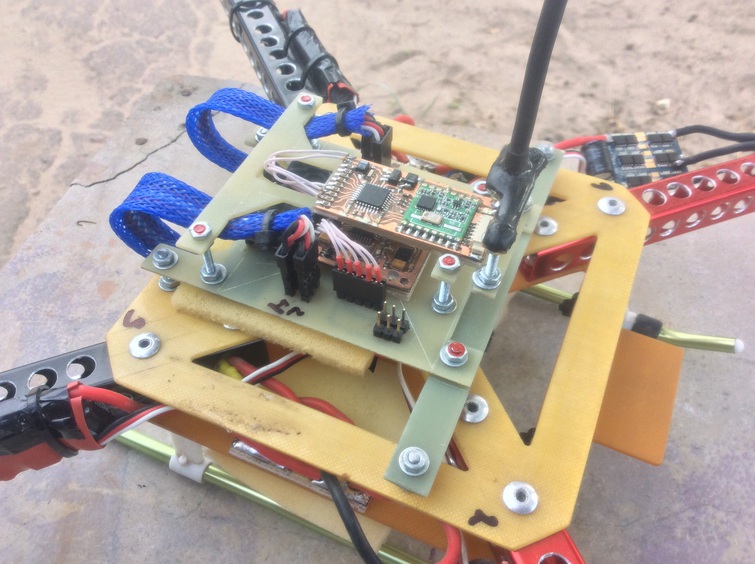
В сборе все выглядит следующим образом
Первые полеты были не совсем удачные. Коптер переворачивался по непонятным мне причинам...
Но при разборе регуляторов на одном обнаружил капельку припоя которая болталась под радиатором. Вероятнее всего она и обрывала мне синхронизацию, ибо после её удаления проблемы исчезли)
Квадрик получился весьма простой и это значит что он может летать в экстремальных условиях, например таких как возле ЛЭП, магнитометра на нем нет, соответственно магнитных полей можно не боятся. А сигналу управления они как показала практика не вредят. Я как любитель полазить в интересных местах взял коптер с собой на вышку, и запупырил селфи). (НЕ ПОВТОРЯТЬ ДОМА)

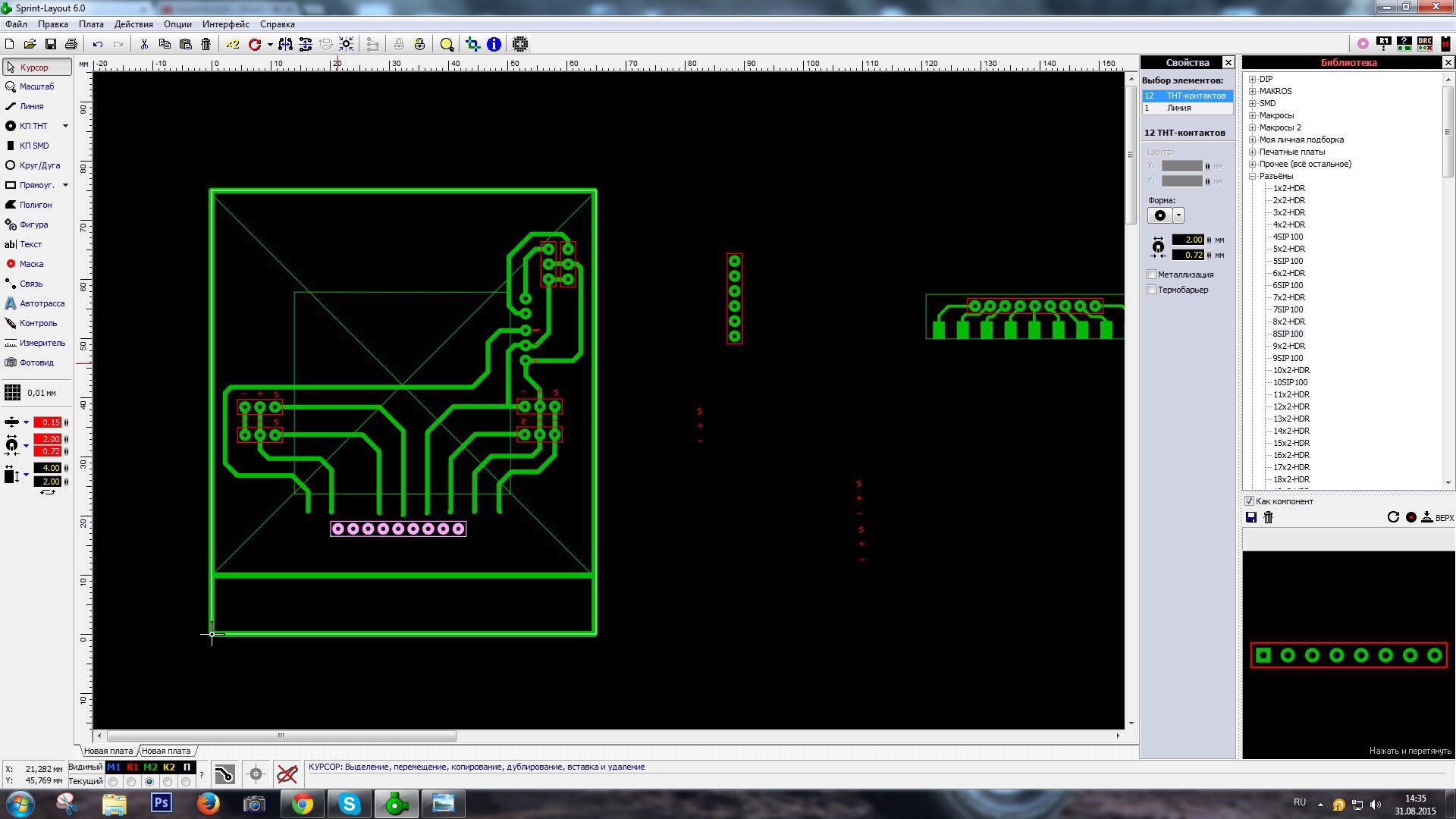
Выложу список деталек.
Печатка контроллера: https://cloud.mail.ru/public/GeaV/vbnSyBYzU
(или вот вариант контроллера попроще http://geektimes.ru/post/258156/ )
ЛРС приемник: http://rghost.ru/82KbCf4ql
Моторы:
 HP2217-930KV Outrunner Brushless Motor For Quadrotor
HP2217-930KV Outrunner Brushless Motor For Quadrotor
 Товар http://www.parkflyer.ru/product/1467372/
Товар http://www.parkflyer.ru/product/1467372/
Регули: ESC 20A SimonK Firmware Multicopter Speed Controller SK-20A
ESC 20A SimonK Firmware Multicopter Speed Controller SK-20A
Товар http://www.parkflyer.ru/product/1467313/
Аккум: Аккумулятор ZIPPY Compact 4000mAh 3S 25C Lipo Pack
Аккумулятор ZIPPY Compact 4000mAh 3S 25C Lipo Pack
Товар http://www.parkflyer.ru/product/401700/

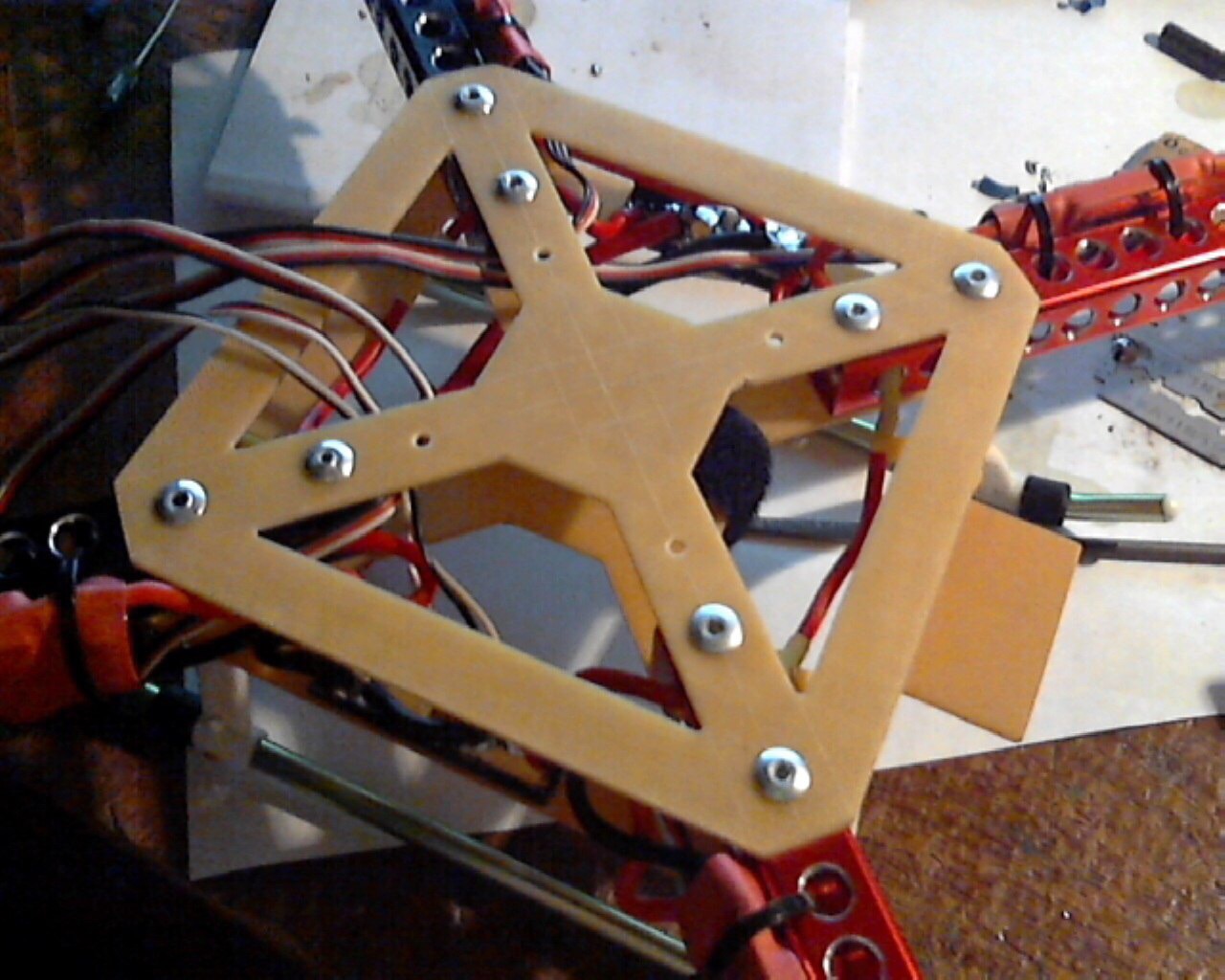
Желание избавится от лишних проводов натолкнуло к мысли о нестандартной конструкции деталей рамы, задумал чтоб мозг подключался к раме не сложнее чем флешка к компьютеру. Изготовил следующее:
Вывел разъемы подключения приемника и моторов, два дополнительных на разные безделушки.

На втором этаже поселится приемник.
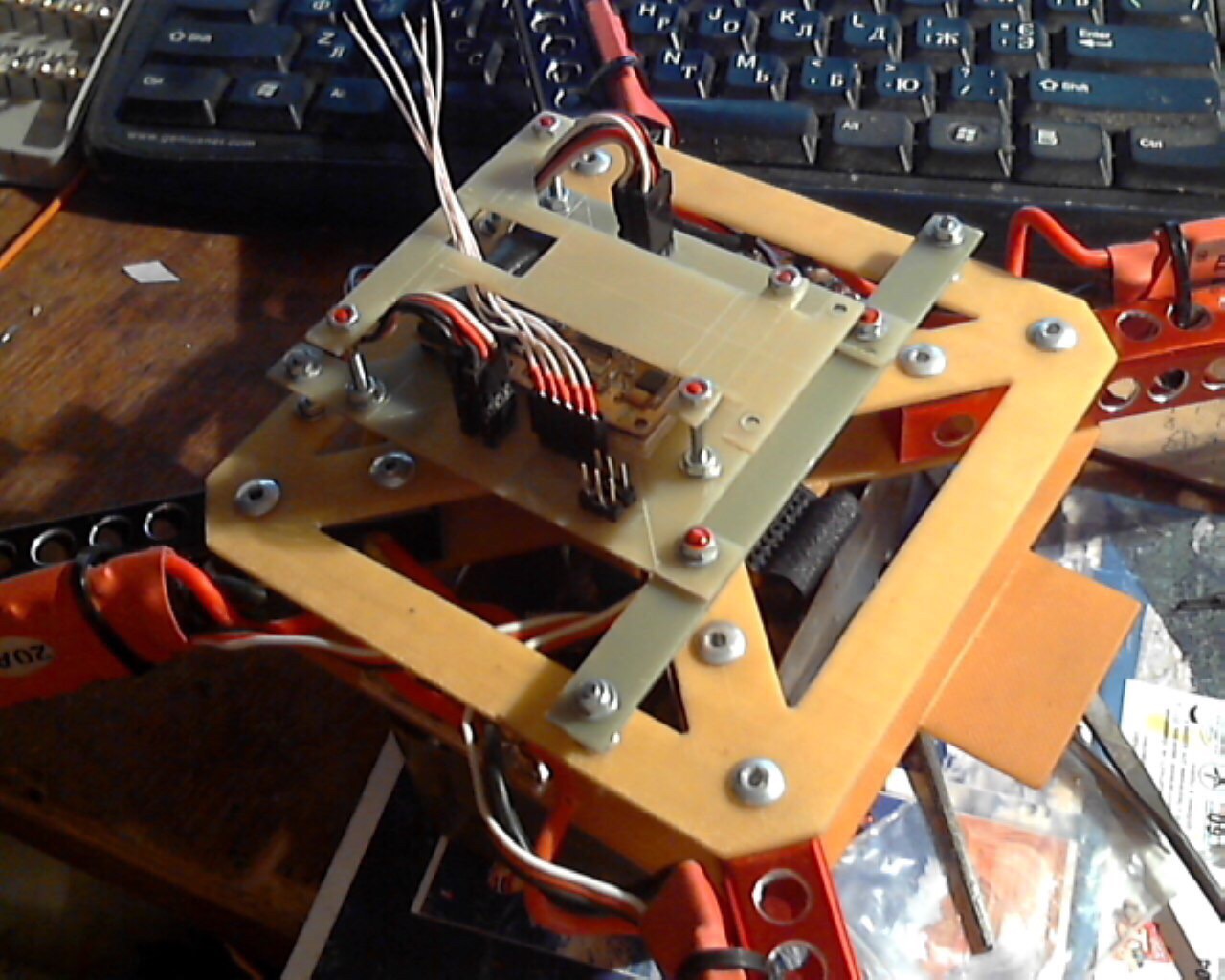
В сборе все выглядит следующим образом
Первые полеты были не совсем удачные. Коптер переворачивался по непонятным мне причинам...
Но при разборе регуляторов на одном обнаружил капельку припоя которая болталась под радиатором. Вероятнее всего она и обрывала мне синхронизацию, ибо после её удаления проблемы исчезли)
Квадрик получился весьма простой и это значит что он может летать в экстремальных условиях, например таких как возле ЛЭП, магнитометра на нем нет, соответственно магнитных полей можно не боятся. А сигналу управления они как показала практика не вредят. Я как любитель полазить в интересных местах взял коптер с собой на вышку, и запупырил селфи). (НЕ ПОВТОРЯТЬ ДОМА)

Выложу список деталек.
Печатка контроллера: https://cloud.mail.ru/public/GeaV/vbnSyBYzU
(или вот вариант контроллера попроще http://geektimes.ru/post/258156/ )
ЛРС приемник: http://rghost.ru/82KbCf4ql
Моторы:
HP2217-930KV Outrunner Brushless Motor For Quadrotor Товар http://www.parkflyer.ru/product/1467372/
Регули:
ESC 20A SimonK Firmware Multicopter Speed Controller SK-20A Товар http://www.parkflyer.ru/product/1467313/
Аккум:
Аккумулятор ZIPPY Compact 4000mAh 3S 25C Lipo Pack Товар http://www.parkflyer.ru/product/401700/













Я извиняюсь, а нельзя ли поподробнее про приёмник?
Самому ума хватает только повтярть за кем-то ((
всё, увидел ниже про флатрон ) Попробую сотворить.
2 http://ru.aliexpress.com/item/30A-Brushless-ESC-Speed-Controller-EMAX-1200KV-Brushless-Motor/1400366515.html
потянут ли они, и поддаются ремонту? и еще один вопрос регули не нужно прошивать?
планирую квадрик под фпв с gopro (или наподобие)и подвесом, вес со всем планирую 1300г
я ток начинающий коптеровод, Сильно не пинайте плз)))
НА СЧЕТ СТАТЬИ +
случаем не в Новосибирске живешь? а то может соседи)
а как вот эти движки : http://ru.aliexpress.com/item/4pcs-CW-CCW-2212-920KV-Brushless-Motor-for-DJI-Phantom-F330-F450-F550-X525-Multirotor/32275914092.html?adminSeq=201725844&shopNumber=727847
вес 56 гр один, сорри что заморачиваю вас, но самое главное ведь эт подбор движков под определенный коптер, не так ли? и диаметр статора и длина магнита важно при выборе двигателей ?
еще по поводу регулей,в них есть уже прошивка? и смысл перепрошивать?
какие лучше? http://ru.aliexpress.com/store/product/30A-Brushless-450-helicopter-multicopter-Motor-Speed-Controller-RC-ESC-Free-shipping/727847_1240179962.html
http://ru.aliexpress.com/store/product/4pcs-lot-30A-SimonK-Prgramme-RC-Brushless-ESC-With-BEC-3A-For-Axis-Quadcopter-Multicopter-Wholesale/727847_32225789649.html
под вышеуказанные моторы реги без паяльника не встанут, т.к.нет разъемов-мама. Хотя бы эти: http://ru.aliexpress.com/item/M-30A-30A-SimonK-ESC-4pcs-with-BEC-For-RC-Quadcotper-Helicopter/32250741238.html
вот только не думаю, что у тебя наберутся эти 30А даже в пиках. Отмечу, что рег под большой ток и весит больше (радиатор, больше компоненты - ничего удивительного). Смотри в сторону проверенных марок - emax, dys, rctimer хотя бы, и поумерь пиковый ток, если конечно в дальнейшем не планируешь ставить их на высоконагруженные квады.
про двигатели - что-то уж совсем дешево. Цена ноунейм комплекта ненамного выше чем стоимость одного хорошего мотора. Летать да, будут, но чем китайцы порадуют за столь низкий ценник (плохая балансировка, разнобой параметров, хилые подшипники, а то и силуминовый корпус) - гадать не буду.
в eCalc не нашел подобные двигателя даж по параметрам,
("2212"/920kV) диаметр статора (либо ротора) и длина магнита важно при выборе двигателей ? вопрос так и остался
у екалк есть одна особенность: обновляешь страницу, и в меню вываливаются уже другие компоненты. Видимо, такова особенность работы для незареганых пользователей. Так что пробуй обновить несколько раз, максимум раза с 5-го должно вывалиться нужное сочетание)
http://ru.aliexpress.com/item/30A-30AMP-SimonK-Firmware-Brushless-ESC-w-3A-5V-UBEC-Quad-Multi-Copter-APM2/32403889189.html
(когда там скидка). Сам брал - претензий пока нет.
Диаметр двигателя важен для диаметра пропа - чем он больше - тем больший крутящий момент может создавать двигатель и тем больший проп раскручивать неперегреваясь, а высота (длина магнита) важна для мощности - чем больше - тем больше мощность.
полезная инфа, я искал искал не мог найти, хоть нашелся добрый человек.
в общем спасибо за полезные ответы скоро буду собирать квадрик, постараюсь написать статью, и надеюсь она будет полезная кому нибудь:)