Глядя на распространение личного электротранспорта вроде электросамокатов и гироскутеров, у которых широко применяются мотор-колёса, я решил опробовать данную схему на р/у машине. Стало интересно, почему производители массово не внедряют подобные технологии в моделизме.

Недостатки, связанные с увеличением неподрессоренных масс и отсутствие защиты от грязи, ограничивают область использования, но задачи участвовать в off road чемпионатах не было. Зато было желание сделать шасси с минимальными трудозатратами, а за одно, избавится от максимального количества деталей.
Предварительно я попытался выяснить, что вообще придумали в мире на заданную тему. За последние 5 лет мне попались только две серьёзные работы - это специально изготовленные моторы для электрификации Baja 5t и 5b, а также полноприводное шасси с контроллером по типу коптерного, для перераспределения момента между колёсами.
Всё остальное представляло собой лишь алюминиевый профиль с прикрученными моторами.
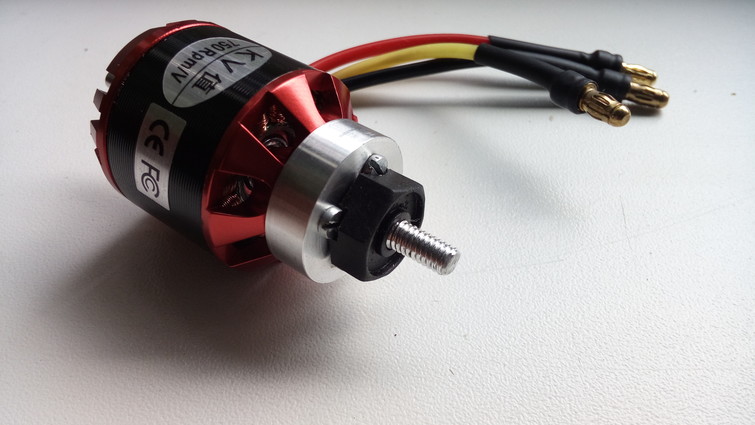
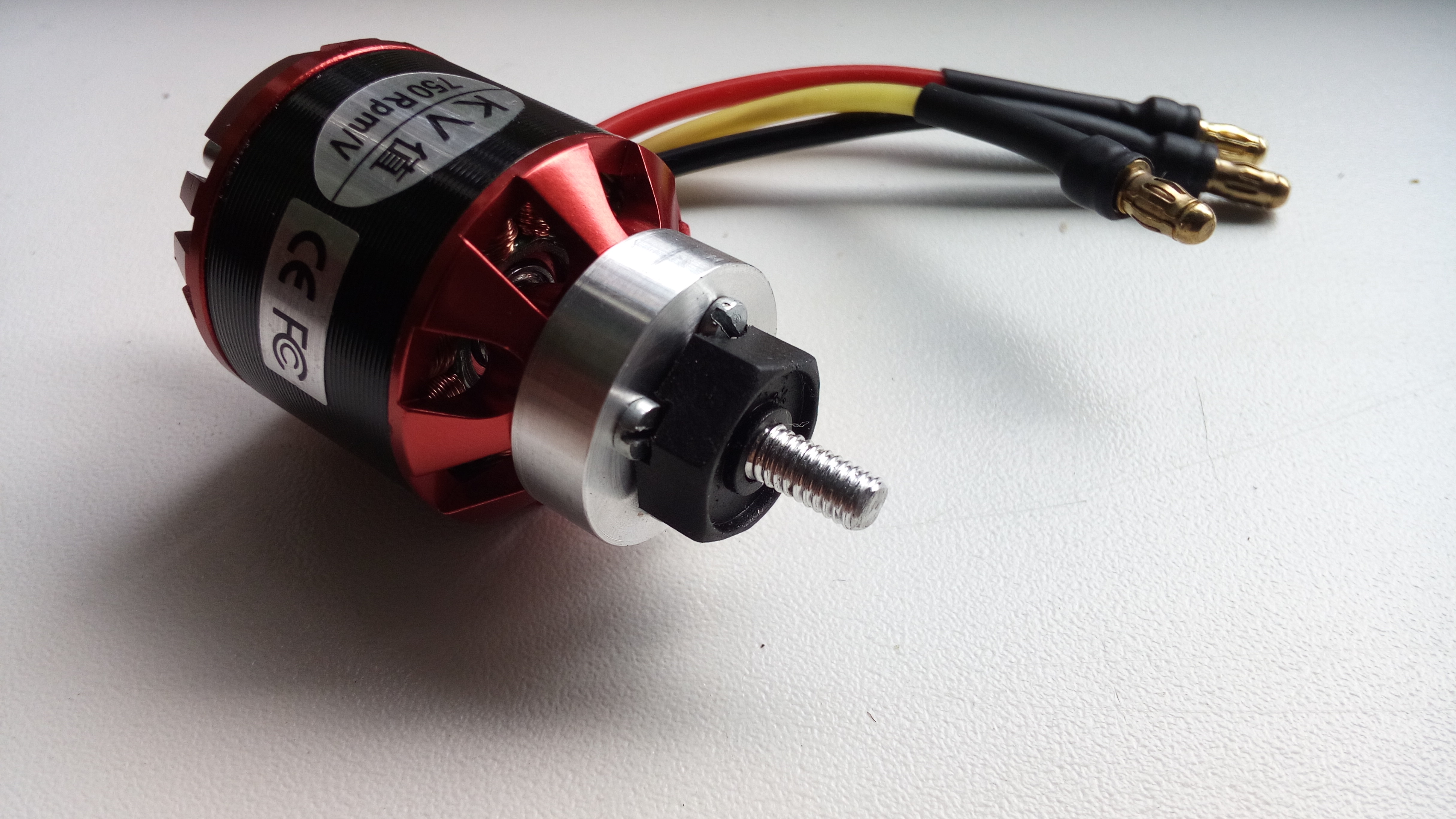
Понимания "минимальных системных требований" не было, но тратиться на мощные регули и моторы тоже не хотелось, так как итоговый результат был совсем не очевиден. Поэтому я купил 2 внешне роторных бк мотора 2830 на 750 об/В и 2 регулятора по 20А так как решил, что суммарные 40А будут либо достаточны, либо нет, но позволят понять как сильно я промахнулся с выбором. Запитано всё было от 2S 35C LiPo (оказалось, что три банки регуляторы не тянут) Донором всего остального стало шасси из статьи RC CAR EVO 2 или долгий путь к совершенству. +111
RC CAR EVO 2 или долгий путь к совершенству. +111
7 июл. 2013 г., 23:44:03 | Дмитрий Зиновьев Санкт-Петербург
 Статья http://www.parkflyer.ru/blogs/view_entry/1844/
, отправленное на полку из-за повышенного расхода дифференциалов. Общий бюджет уложился в 4 т.р.
Статья http://www.parkflyer.ru/blogs/view_entry/1844/
, отправленное на полку из-за повышенного расхода дифференциалов. Общий бюджет уложился в 4 т.р.
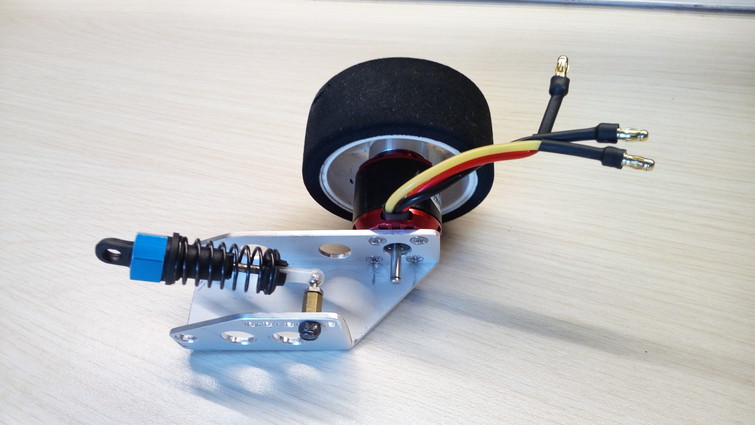
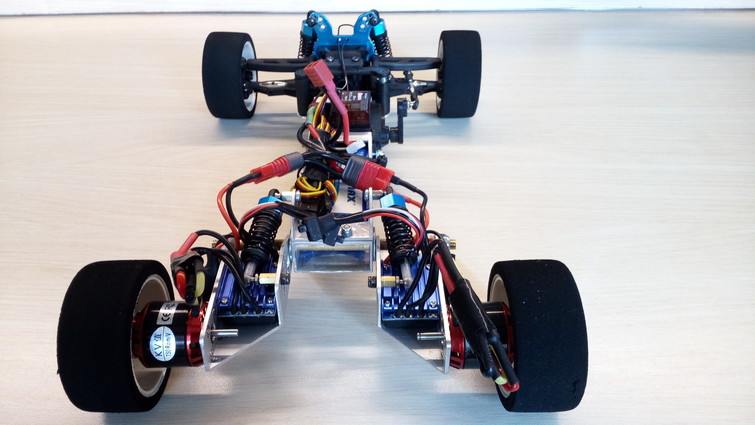
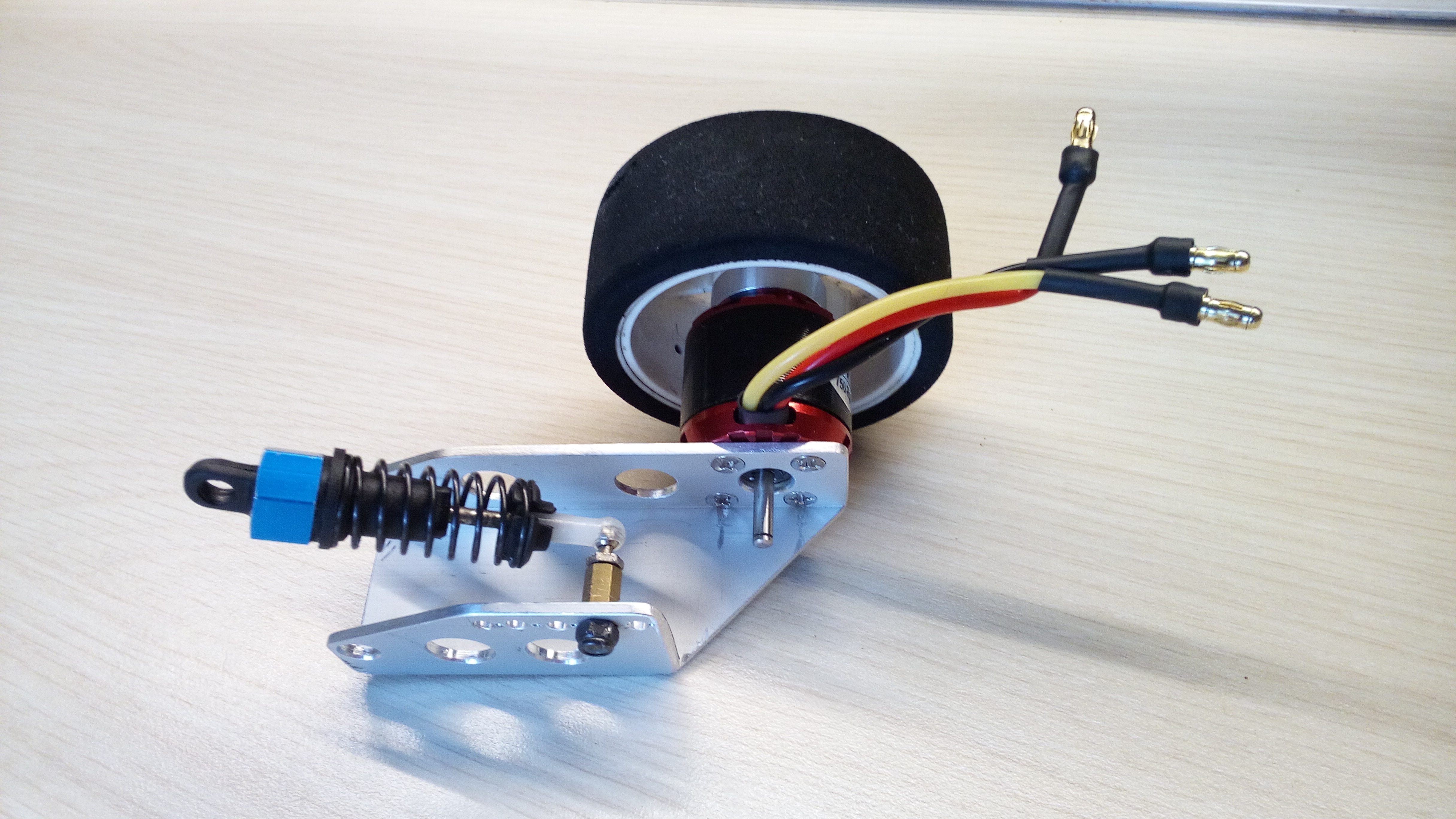
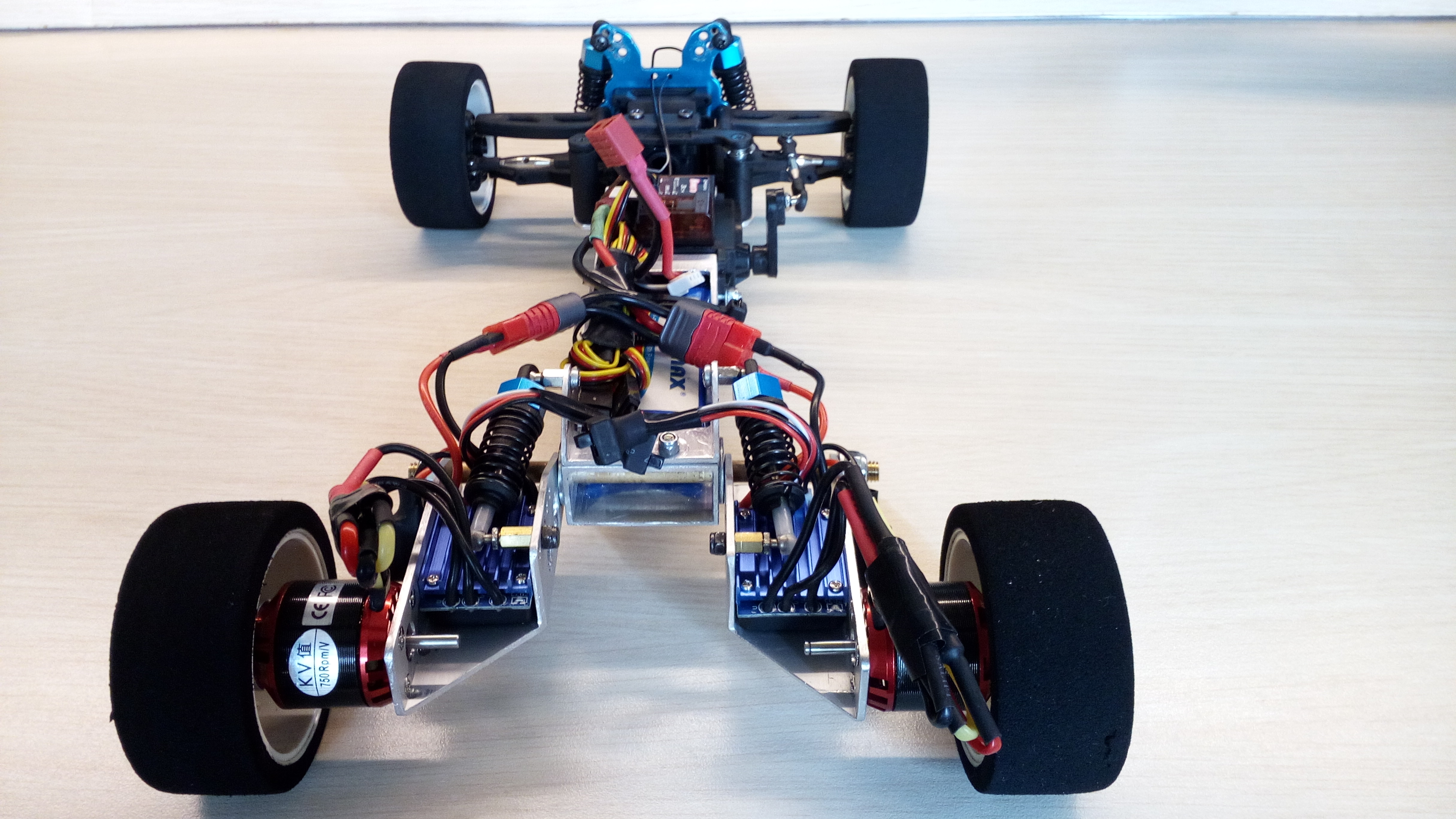
Начать работу решил с поиска оптимального варианта соединения мотора с колесом. Самым разумным было крепить колесо непосредственно на внешний ротор, и поэтому наличие крепёжных отверстий на нём было обязательно. Без заказанного у знакомого токаря переходника не обошлось. Спасибо ему за качественные заготовки, на которых я только нарезал резьбу.

В итоге колесо ставится как на обычном шасси.
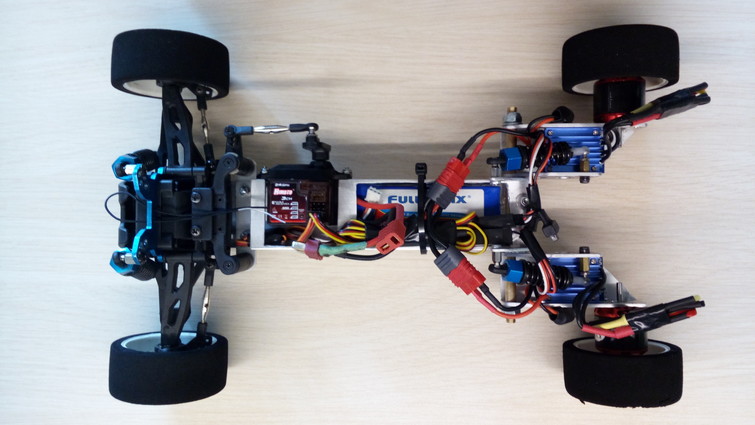
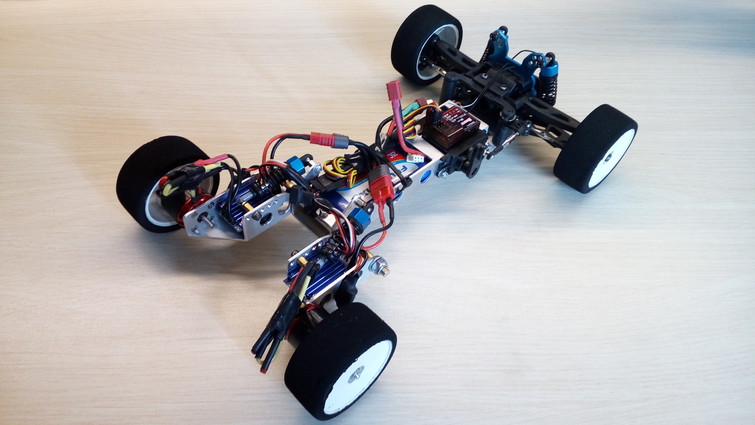
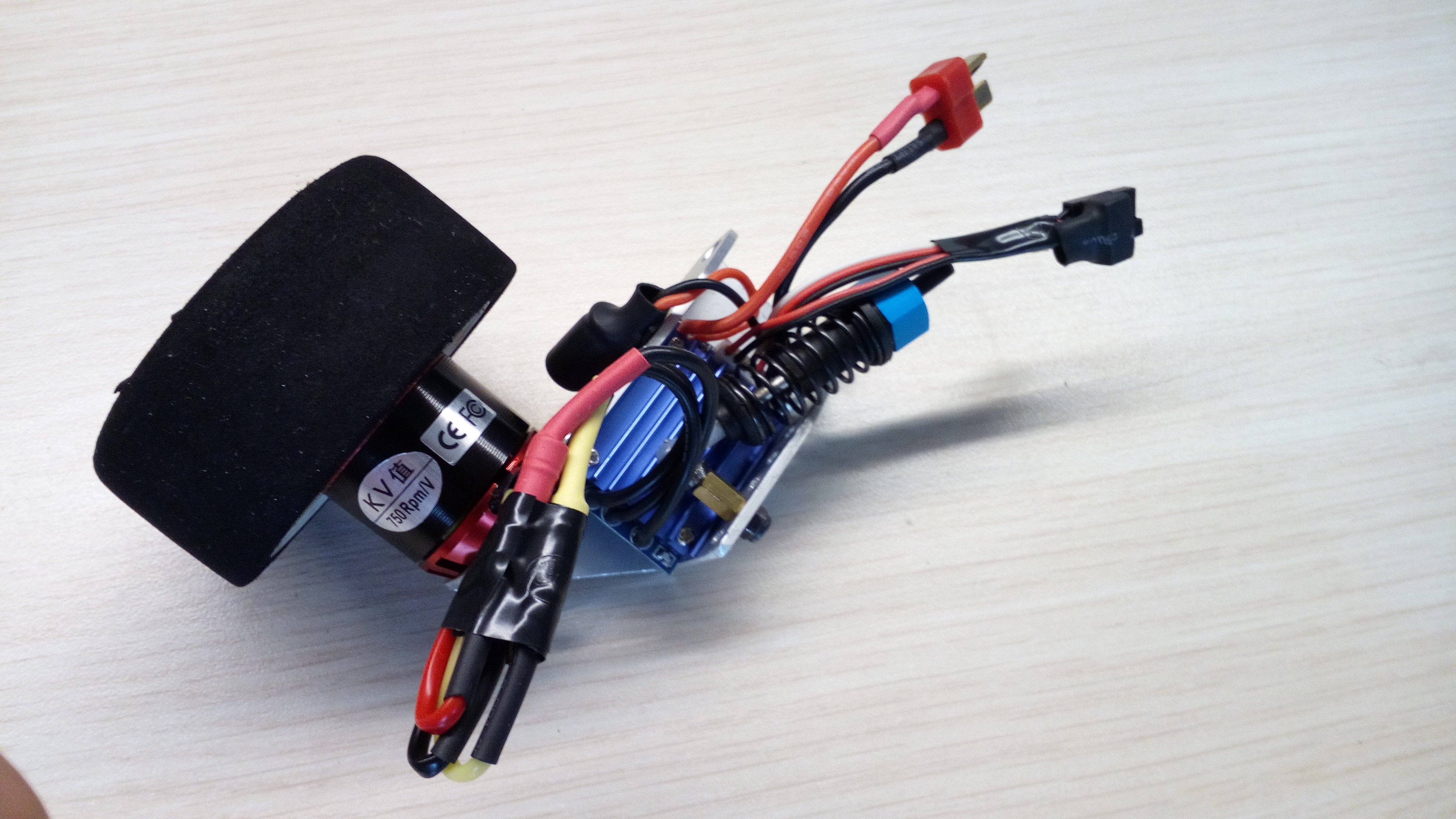
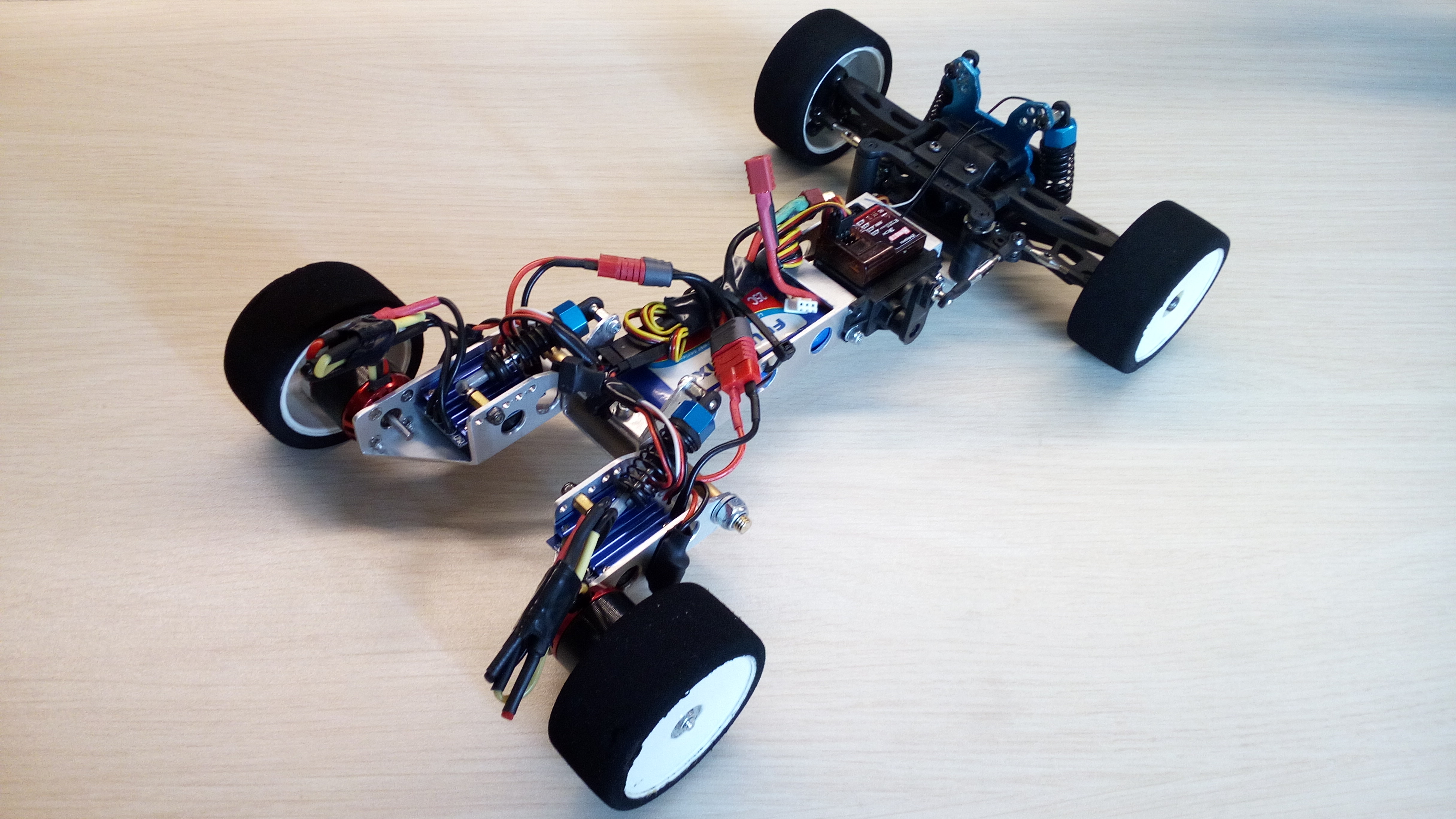
С типом подвески особо не мудрил. Спереди мост с донора, а сзади на продольных рычагах. Совсем без задней подвески никак, а в случаи неудачного результата не так обидно за потраченное время. Рычаги пилил из алюминиевого профиля.
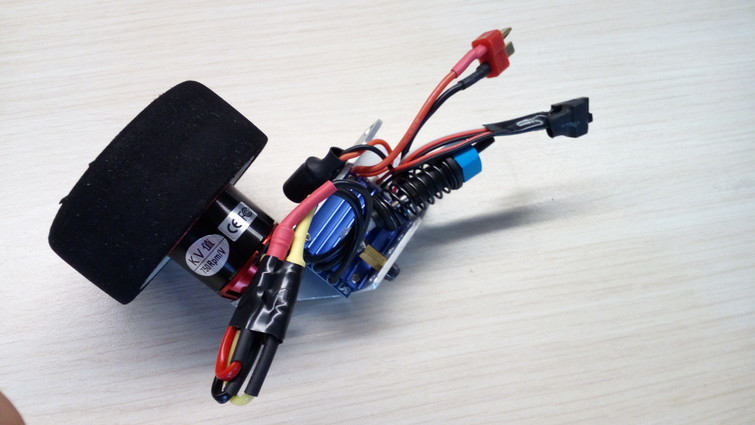
И на них же установил регуляторы.
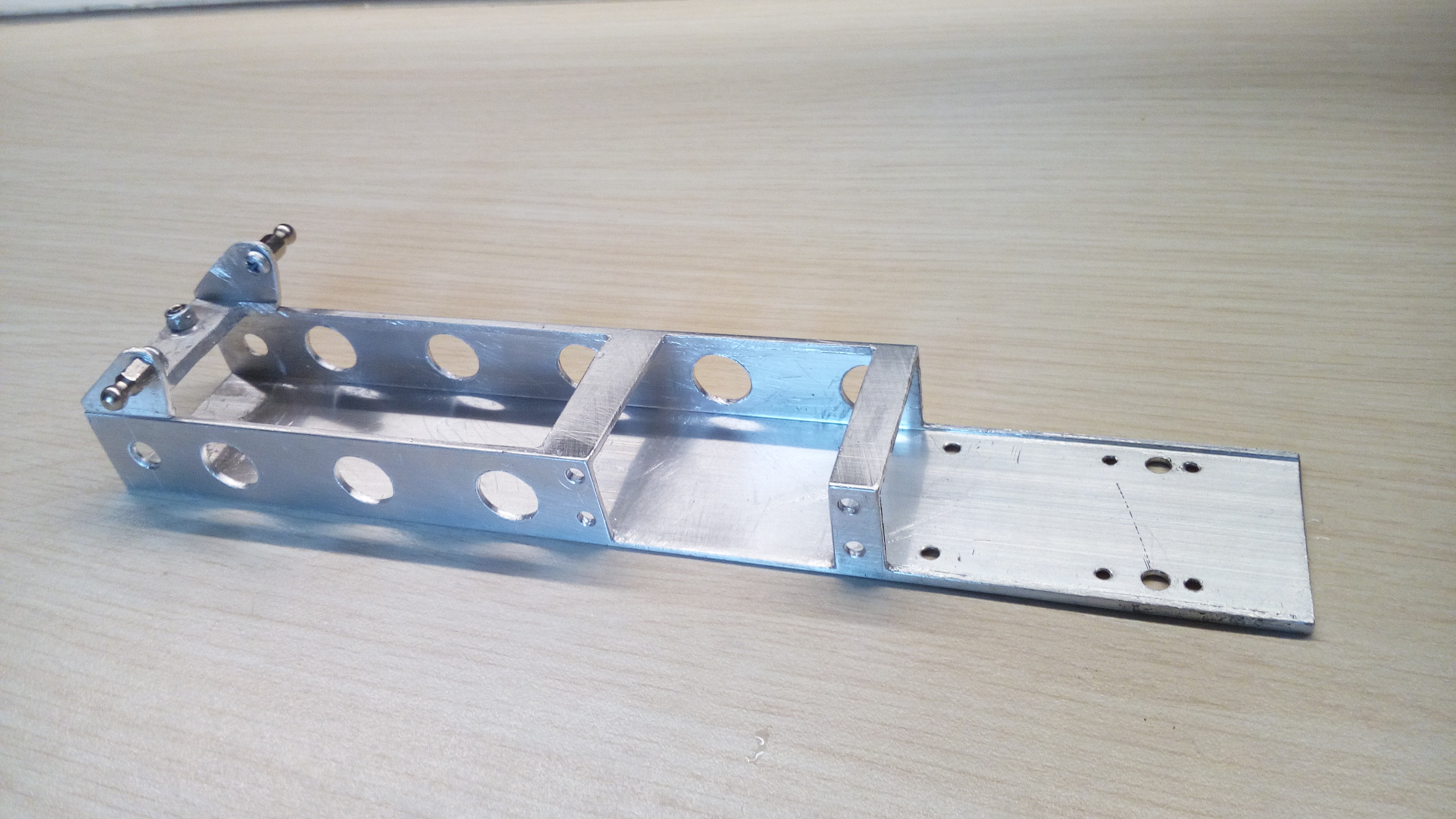
С рамой тоже всё просто.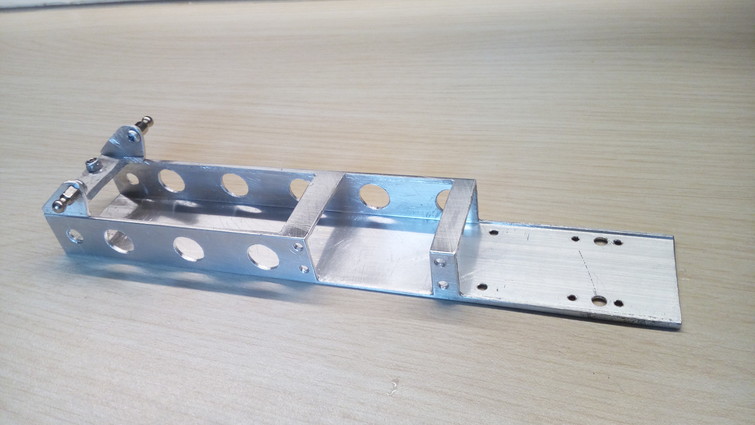
Рычаги соединяются с рамой единой латунной осью, и в итоге получается следующее.
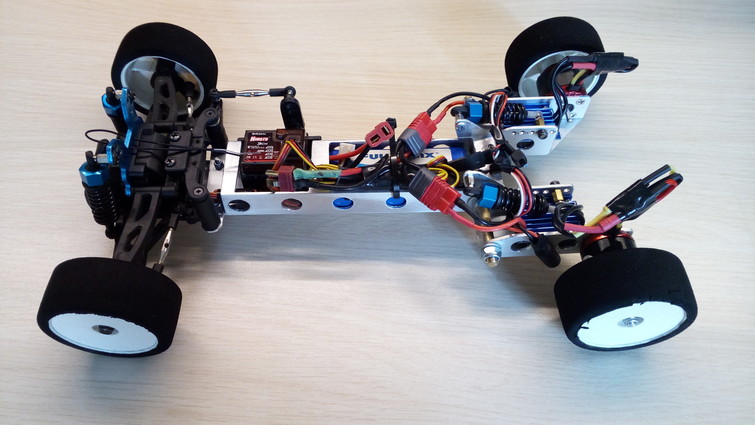
Ширина 200 мм
База 270 мм
Вес 750 г.
В целом, всё вышло, как планировалось, за исключением одного НО... Для старта требуется импульс в виде пинка. Самостоятельно стартовать машина может, если на колёсах намотан скотч или подними что-то скользкое. Ситуацию могла бы исправить система с датчиком холла, чтобы регулятор мог отследить наличие или отсутствие вращения ротора и при необходимости повысить стартовый ток, ведь для движения после старта тяги на колёсах достаточно. Второй способ - регулятор с большим током на выходе. После подключения одного мотора к регулятору на 60А машина без проблем стартовала даже без участия второго двигателя на той же батарее. Так что теперь выбираю другие регуляторы.
Я считаю это направление перспективным, ведь это позволяет расширить возможности шасси за счёт добавления электроники способной раздельно управлять моментом на каждом колесе как у коптеров. Сами двигатели можно изготовить с пыльниками и полностью убрать их в колесо либо крепить на раме в корпусе как у дифференциалов.
Когда то я хотел сделать багги 5-го масштаба с двс, но всё упёрлось именно в трансмиссию. Хочу и дифференциал, и реверс и избежать дорогих токарно-фрезерных робот. Все детали пылятся в ожидании гениальных идей. Но сейчас всё чаще посещает мысль о простой установке мотор-колёс с регуляторами с б/у гироскутера.
Предварительно я попытался выяснить, что вообще придумали в мире на заданную тему. За последние 5 лет мне попались только две серьёзные работы - это специально изготовленные моторы для электрификации Baja 5t и 5b, а также полноприводное шасси с контроллером по типу коптерного, для перераспределения момента между колёсами.
Всё остальное представляло собой лишь алюминиевый профиль с прикрученными моторами.
Понимания "минимальных системных требований" не было, но тратиться на мощные регули и моторы тоже не хотелось, так как итоговый результат был совсем не очевиден. Поэтому я купил 2 внешне роторных бк мотора 2830 на 750 об/В и 2 регулятора по 20А так как решил, что суммарные 40А будут либо достаточны, либо нет, но позволят понять как сильно я промахнулся с выбором. Запитано всё было от 2S 35C LiPo (оказалось, что три банки регуляторы не тянут) Донором всего остального стало шасси из статьи
RC CAR EVO 2 или долгий путь к совершенству. +1117 июл. 2013 г., 23:44:03 | Дмитрий Зиновьев Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/1844/
, отправленное на полку из-за повышенного расхода дифференциалов. Общий бюджет уложился в 4 т.р.Начать работу решил с поиска оптимального варианта соединения мотора с колесом. Самым разумным было крепить колесо непосредственно на внешний ротор, и поэтому наличие крепёжных отверстий на нём было обязательно. Без заказанного у знакомого токаря переходника не обошлось. Спасибо ему за качественные заготовки, на которых я только нарезал резьбу.

В итоге колесо ставится как на обычном шасси.
С типом подвески особо не мудрил. Спереди мост с донора, а сзади на продольных рычагах. Совсем без задней подвески никак, а в случаи неудачного результата не так обидно за потраченное время. Рычаги пилил из алюминиевого профиля.
И на них же установил регуляторы.
С рамой тоже всё просто.
Рычаги соединяются с рамой единой латунной осью, и в итоге получается следующее.

Ширина 200 мм
База 270 мм
Вес 750 г.
В целом, всё вышло, как планировалось, за исключением одного НО... Для старта требуется импульс в виде пинка. Самостоятельно стартовать машина может, если на колёсах намотан скотч или подними что-то скользкое. Ситуацию могла бы исправить система с датчиком холла, чтобы регулятор мог отследить наличие или отсутствие вращения ротора и при необходимости повысить стартовый ток, ведь для движения после старта тяги на колёсах достаточно. Второй способ - регулятор с большим током на выходе. После подключения одного мотора к регулятору на 60А машина без проблем стартовала даже без участия второго двигателя на той же батарее. Так что теперь выбираю другие регуляторы.
Я считаю это направление перспективным, ведь это позволяет расширить возможности шасси за счёт добавления электроники способной раздельно управлять моментом на каждом колесе как у коптеров. Сами двигатели можно изготовить с пыльниками и полностью убрать их в колесо либо крепить на раме в корпусе как у дифференциалов.
Когда то я хотел сделать багги 5-го масштаба с двс, но всё упёрлось именно в трансмиссию. Хочу и дифференциал, и реверс и избежать дорогих токарно-фрезерных робот. Все детали пылятся в ожидании гениальных идей. Но сейчас всё чаще посещает мысль о простой установке мотор-колёс с регуляторами с б/у гироскутера.













По такому же принципу(бк мотор в колесе) хочу когда-то собрать р/у мотоцикл.
(motor_wheel.mp4)
Из-за этого эффекта пришлось установить два контроллера. Такой же эффект у коллекторных моторов включенных последовательно.
Может попробовать поставить ветролетный регулятор?
Он отлично раскручиват на старте, медленно и плавно.