Однажды с другом купили попробовать машинку масштаба 1/16 и затянуло…


Перешел на масштаб 1/10, переделывал из 4х4 в 6х6, катал детей на санках и коньках за машинкой.
Но все было как-то стандартно, а инженерная мысль не давала покоя.
Решил сделать шасси с особенностями, которые редко увидишь в масштабных моделях.
Запчасти старался выбирать совместимые с моими остальными машинами для унификации.(Traxxas Summit, E-Maxx)
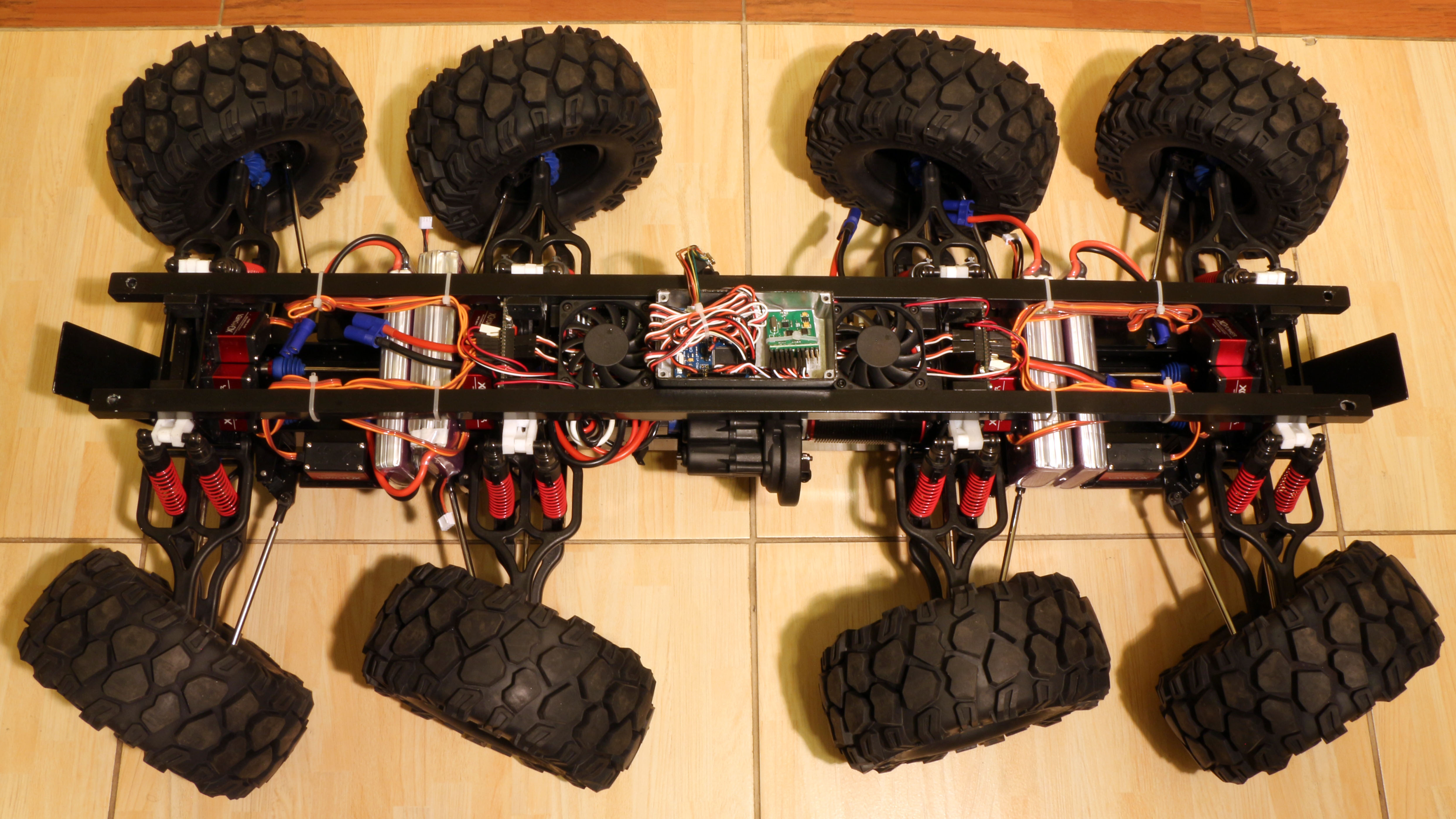
Итак шасси 8x8x8.
Трансмиссия бортовая - у левого и правого борта свой электромотор. (такая трансмиссия применяется в гусеничной технике и некоторых внедорожниках).
Это позволяет передавать необходимый момент на колеса в повороте без применения дифференциала. Т.е. дифференциал реализуется программным образом в контроллере управления. Такой тип трансмиссии позволяет осуществлять разворот на месте. Не требуются дополнительные блокировки для повышения проходимости.
Колесные редукторы пришлось изготавливать самому. Точнее сделал чертеж и отдал фрезеровщику.

Сам редуктор очень просто устроен - в нем по две конические шестерни на колесо.



Каждый редуктор является проходным - т.е. можно сделать шасси с различным количеством ведущих осей, без дополнительных механизмов.
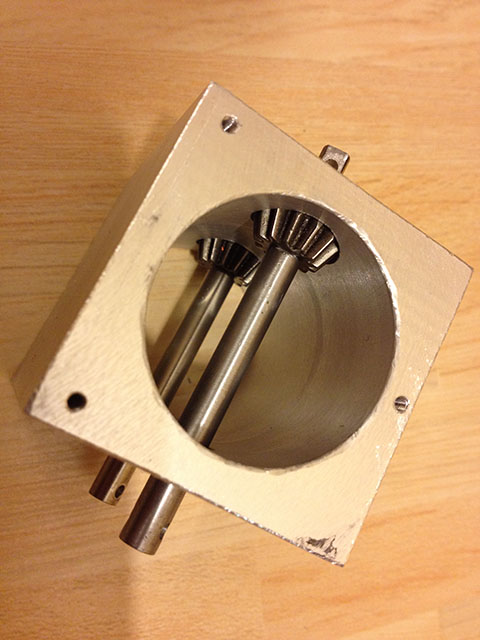
Редуктор с карданами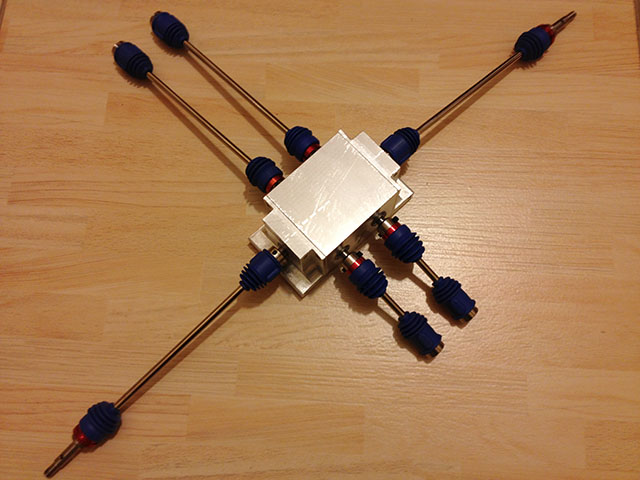
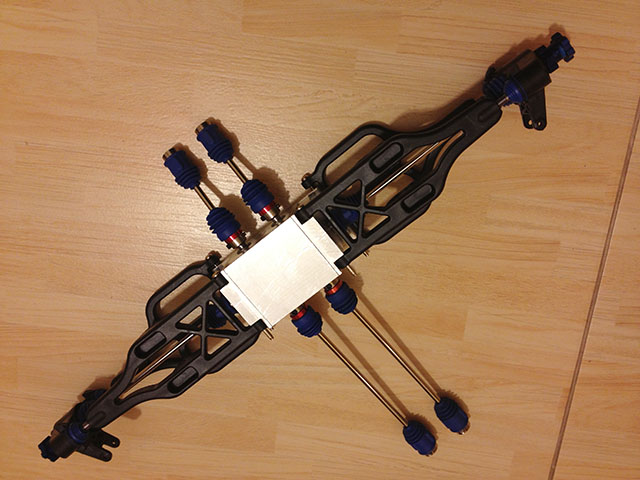
Редуктор является силовым элементом, на него крепятся все детали подвески. Редуктора соединяются между собой алюминиевым уголком.

Коробки скоростей стандартные двух скоростные от радиоуправляемых машин такого класса.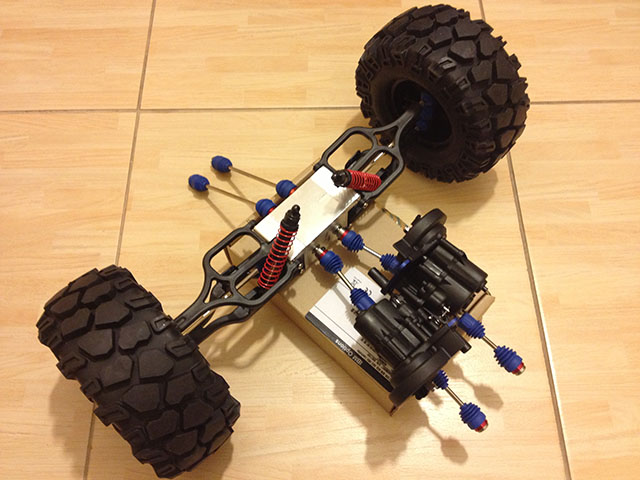
Проверка редукторов.
Моторы применил бесколлекторные трехфазные с сенсорной обратной связью, для плавного управления на низких оборотах. Коллекторные не стал применять из-за низкой надежности.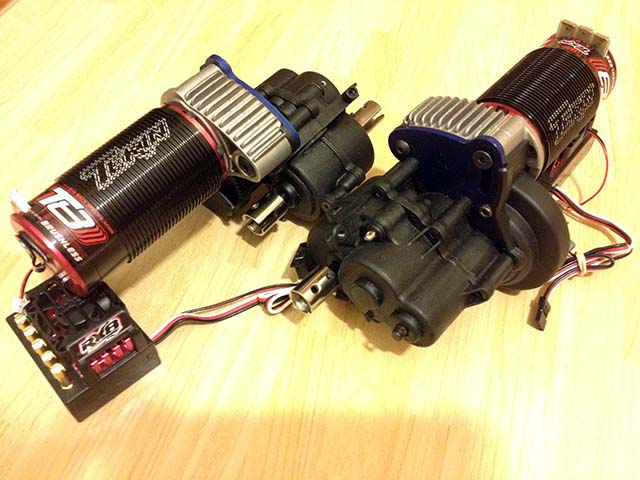
Контроллеры моторов дополнительно загерметил термокомпаундом КПТД.
Крепление моторов

Подвеска колес с электрически изменяемым клиренсом.
Каждое колесо соединено с шасси через пружину и масляный амортизатор, но не напрямую, а через рычаг с электроприводом.
Это предварительная версия.
На каждое колесо используется свой канал управления.
Это позволяет управлять не только вертикальный уровень, но и менять горизонт.
Т.е. осуществлять продольную и поперечную устойчивость кузова.
В подвеске четыре режима:
1. Полностью отключенные сервоприводы.
2. Статическое управление клиренсом и горизонтом.
3. Прогрессивная поперечная стабилизация в поворотах (шасси накреняется внутрь поворота, как мотоцикл).
4. Гиростабилизация.
Минимальный клиренс. 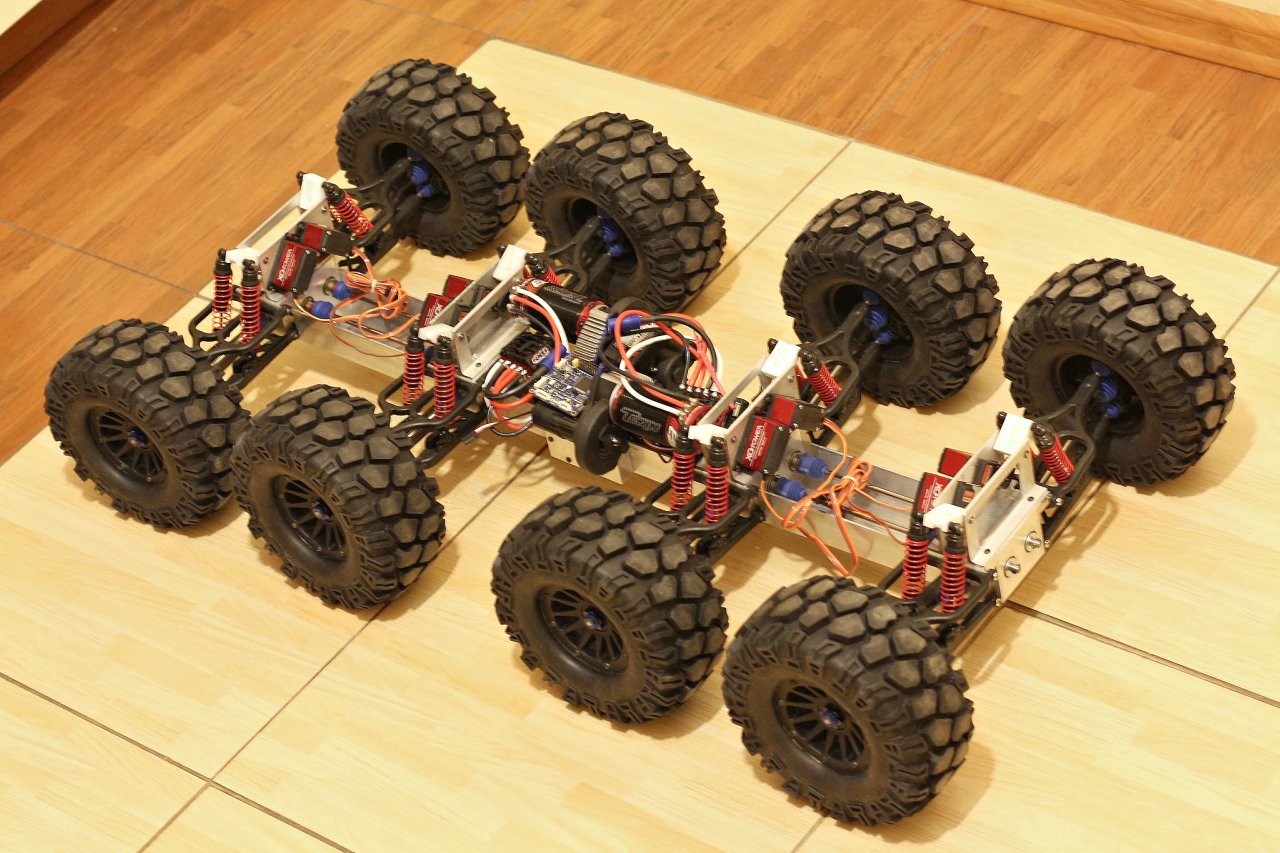
Максимальный клиренс.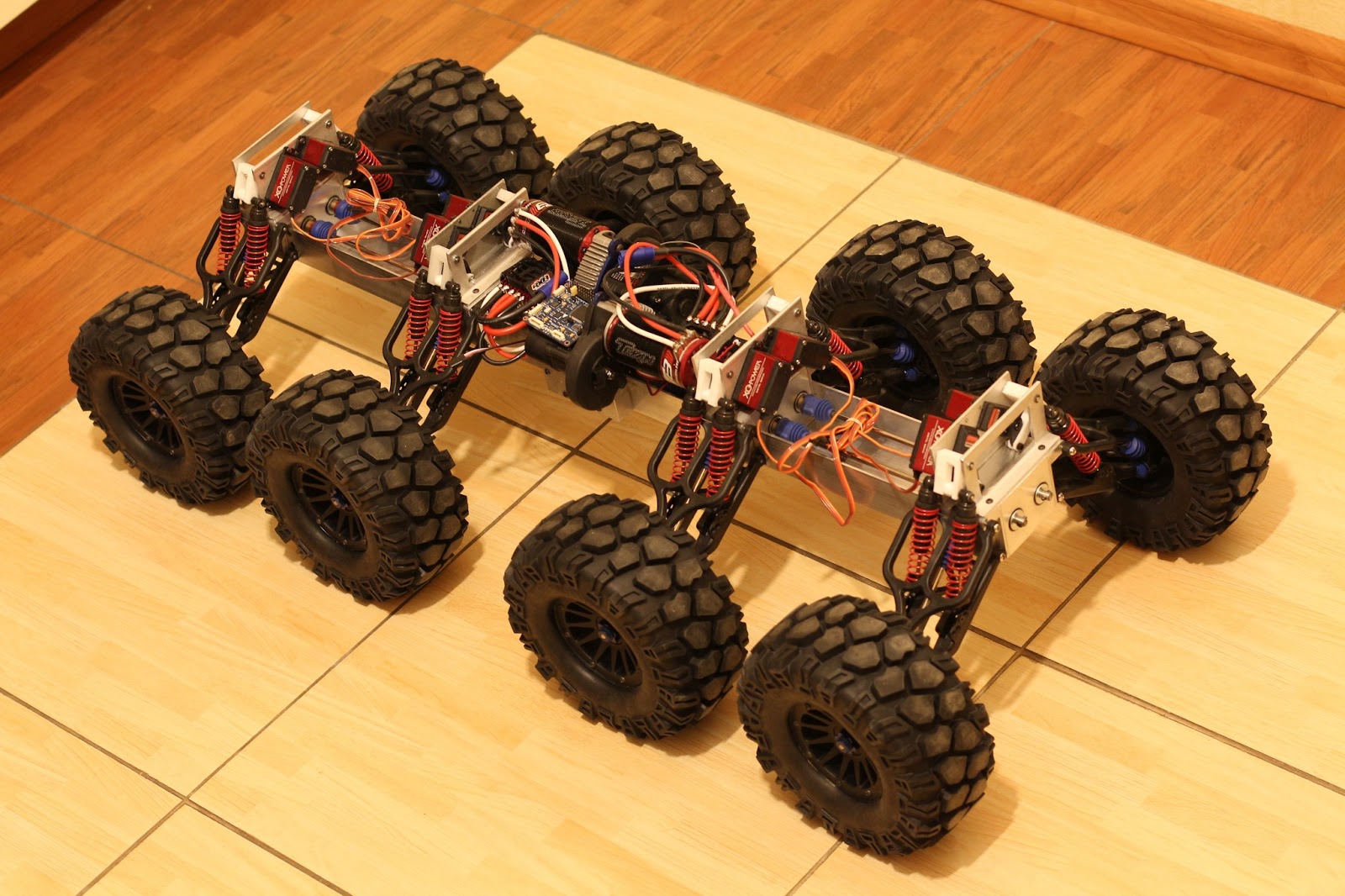
Проверка электроподвески.
Проверка гироскопической обратной связи.
Рулевых механизма четыре. Все колеса поворотные. На один сервопривод подключено по два колеса, но не с левого и правого борта, как на классических машинах, а соседние по одному борту. Например переднее правое соединено со средним передним правым. Далее будет пример различных комбинаций управления.
Держатели рулевых тяг пришлось сделать самому.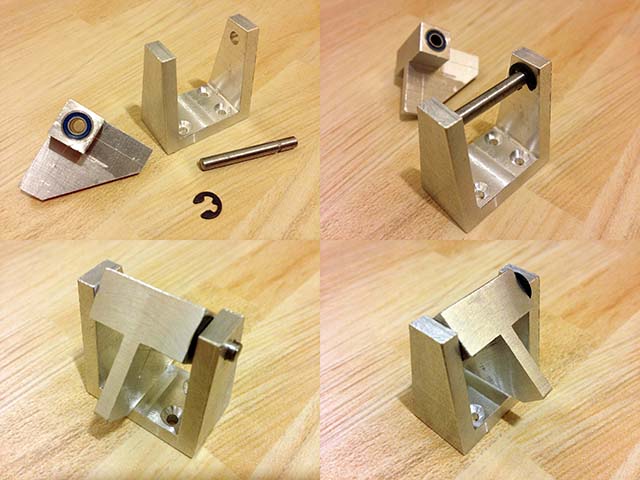

Я сделал четыре режима рулевого управления:
1. Классическое - поворачивают только передние колеса.
2. Поворачивают передние и задние колеса, но задние зависят от скорости движения. Для повышения маневренности на малой скорости сильно поворачиваются, а на большой скорости практически не поворачиваются для повышения устойчивости.
3. Колеса фиксируются в среднем положении, руление осуществляется изменением момента в бортовой трансмиссии.
4. Дополняет третий вариант складыванием колес плугом для разворота на месте с меньшим трением.
На все потребовалось 12 сервоприводов.
Сервоприводы высоковольтные и подключены напрямую к 2s LiPo аккумуляторам.

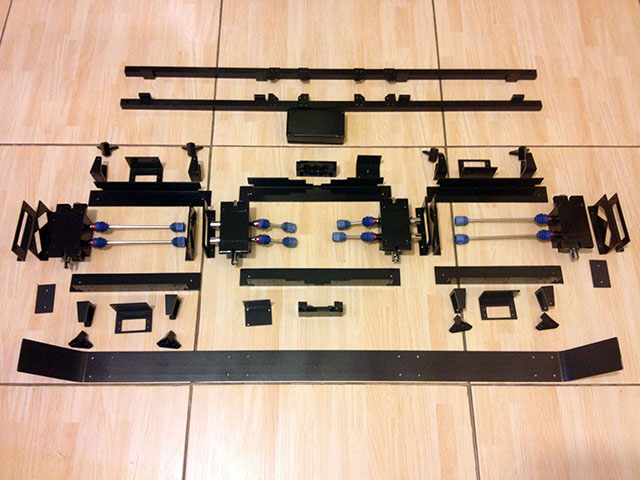
Самодельные части после покраски
Все функции управления реализовал на квадрокоптерном контроллере CRIUS AIO Pro на базе кода Arduino Multiiwi 2.2.
В контроллере много портов ввода/вывода и готовая трехосная гиро система.
Контроллер находится в центре шасси сверху в герметичном алюминиевом корпусе, вместе с ним восьмиканальный приемник системы радиоуправления.
Система радиоуправления восьмиканальная самолетная Turnigy 9x.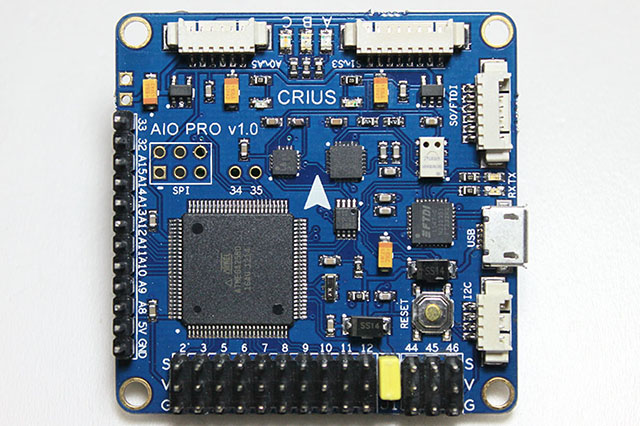
Дополнительно планирую добавить датчики оборотов на моторы, чтобы реализовать алгоритмы устойчивости в поворотах, противобуксовочный режим, а так же антиблокировку при торможении.
БТР-80 получился случайно - дело в том, что изначально я делал просто шасси 8x8 и когда задумался над корпусом, то оказалось, что его основные размеры совпали с БТР.
Корпус сделал из оцинкованной стали пайкой. За основу для выкроек взял бумажную развертку от чехов масштаба 1/25 и пластмассовую модель "Звезда" для склейки масштаба 1/35. Нижнюю часть пришлось частично срезать для совместимости с моим шасси, поэтому получился немного приплюснутым.





Внутреннюю полость для плотности заполнил монтажной пеной.
Фары сделал в медном корпусе для хорошего охлаждения. Внутри светодиод CREE XM-L T6 с драйвером.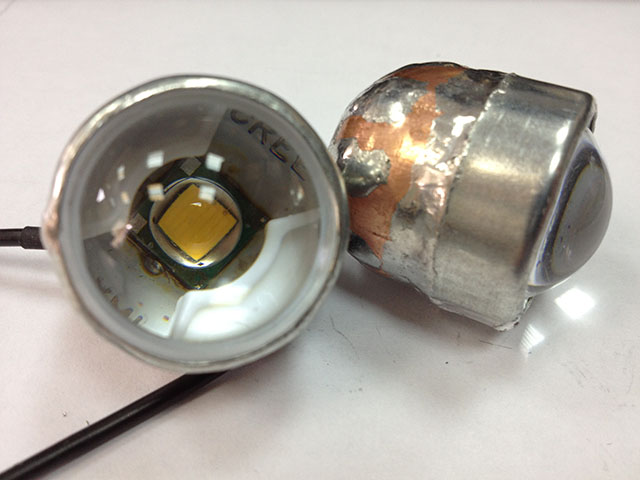
После покраски. 

К сожалению корпус получился значительно тяжелей, чем запланированная грузоподъемность шасси.
Постараюсь сделать легкую версию из лексана.
Пока пришлось заменить пружины на более мощные, а электроприводы в подвеске использовать кратковременно. 



Пушку пока ставить не стал, боюсь мои дети могут пораниться. Возможно сделаю мягкий муляж.

ТТХ:
ВхШхД 1180x460x440мм (при максимальном клиренсе), колея 400мм
Клиренс меняется от 0 до 80мм. (со слабыми пружинами)
Вес: 21кг (из них корпус - 6 кг, шасси - 15 кг вместе с аккумуляторами)
Питание: два 3s LiPo 6000mAh на моторы, два 2s LiPo 6000mAh на сервы.

Видео процесса сборки
Рассказываю про основные особенности
Смотрим с 7:49 минуты про нестандартное применение машины )))
Первые испытания
В этом видео меняю клиренс
Старался изложить кратко.
Если, что забыл упомянуть, то веду блог про свои машины
http://www.krohpit.ru
Прямая ссылка на БТР http://www.krohpit.ru/2013/07/rc-btr-80-rus.html
Прямая ссылка на шасси http://www.krohpit.ru/2013/01/krohpit-8x8-gyro.html
Прошивка контроллера http://www.krohpit.ru/2012/12/crius-all-in-one-pro-krohpit-8x8.html
Жду вопросы, предложения дополнительных идей.
P.S. От идеи до модели прошел примерно год.
Машину сделал такую крупную, потому что моим детям нравится на санках на буксире кататься, а то у Summit 6x6 уже мощи не хватает. Семейство то пополнилось пока собирал машину )) Успел доделать как раз перед снегопадами.
Для дальнейших работ с электроподвеской сделаю 4х4 вариант этого шасси.













Точнее двое санок с четырьмя детьми :-)
Сделал небольшой ремонт после первого заезда. Один кардан у коробки скоростей был неглубоко вставлен в шлиц стаканчика, в итоге вал вышел из шлица и развальцевал кромку стаканчика, попутно разбив входной подшипник колесного редуктора. Пришлось сделать новый стаканчик на 5мм длиннее.
Постепенно начал менять фторопластовые рычаги изменения клиренса на алюминиевые. Фторопласт черезчур эластичный и плохо держит нагрузку на разрыв. Для варианта шасси БТР-80 из стали не подходит.
После поездки по снегу возникла необходимость доработки в прошивке контроллера функции программного дифференциала в классическом управлении рулем. Например один борт находится на укатанном снегу, второй на рыхлом и надо вырулить на твердый грунт. У меня получается что при сильном повороте руля на колеса внутреннего радиуса поворота момент не то что не подается, а еще и поддтормаживает трансмиссией, в то время как на колеса внешнего радиуса поворота подается полная мощность и они зарываются. Необходимо сделать программный аналог вязкого трения масла в обычном дифференциале.
Шедевр... больше сказать нечего ++++ плюсище...
Теперь вознаграждение автора достойнее.
Мы боремся с накрутками, а не с теми, чье мнение противоположно большинству.
Крутожуть. + А линзы в фарах принадлежность светодиодов, или отдельные? И еще, во фразе "... применил бесколлекторные трехфазные ..." уберите слово "трехфазные", так будет грамотнее, т.к. эти двигатели не трехфазные. Удачи !!!
P.S. Забыл спросить. У Вас есть доступ к металлообрабатывающим станкам, или детали заказывали?
Светодиоды очень мощные (10Вт 900люмен), при фокусировке в точку прожигают изоленту. Но у меня они работают не на полную мощность, т.к. недостаточное охлаждение.
Двигатели трехфазные синхронные с датчиками Холла для обратной связи.
Детали заказывал у знакомого, т.к. для такой мелкосерийности дороговато пока станок покупать