Сегодня я хочу рассказать о такой замечательной вещи, как HeadTracker. Стоимость изготовления составляет около 600 рублей
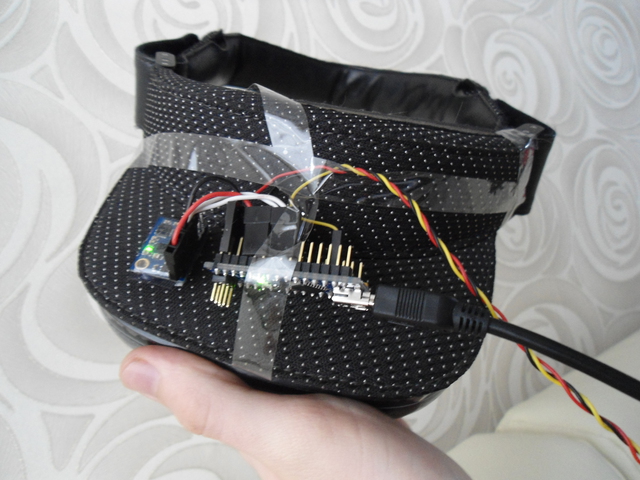
Извините за некрасивое крепление трекера, скотч не приклеивается к козырьку видеоочков HeadPlay.
Меня всегда манила возможность осматриваться в полёте, получая необыкновенные ощущения реального полёта. Даже во время первых полётов в очках я самопроизвольно поворачивал голову.
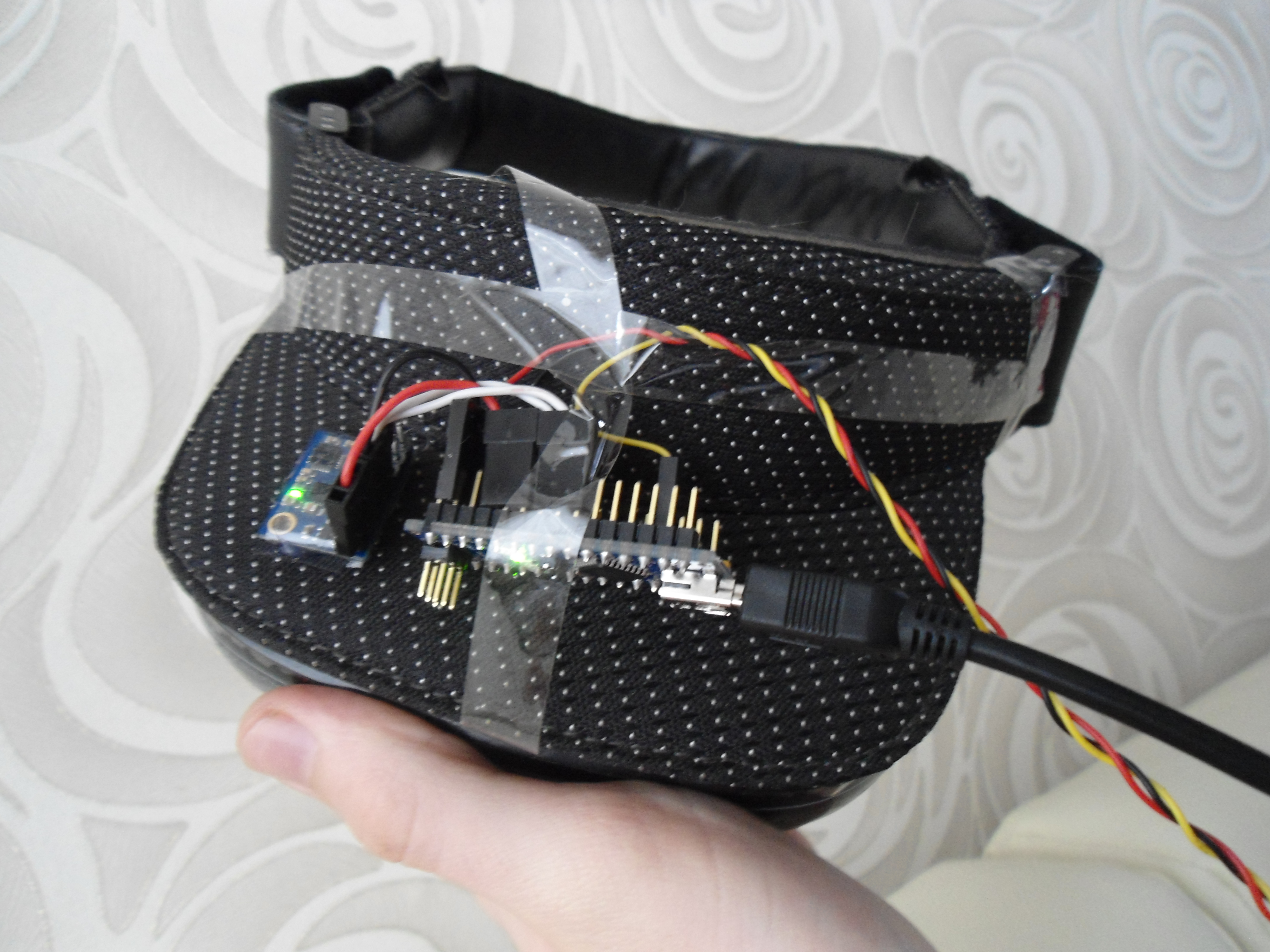
На картинке показан пробный вариант хедтрекера. Почему пробный? Потому что я просто хотел проверить, может ли работать это чудо. Конечно, можно сделать красивый корпус, поставить термоусадку, но я решил не усложнять проект.
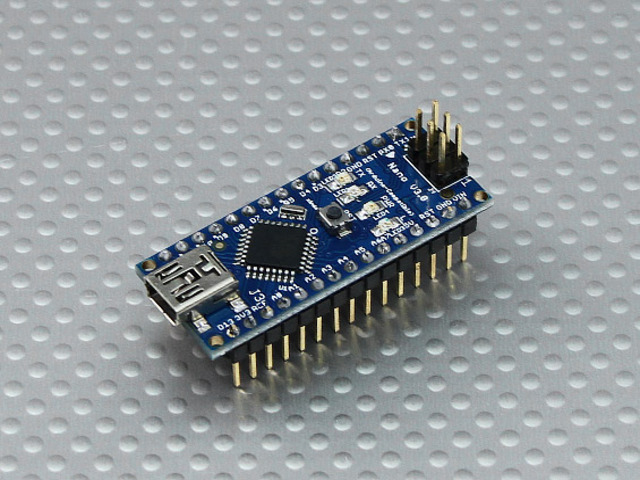
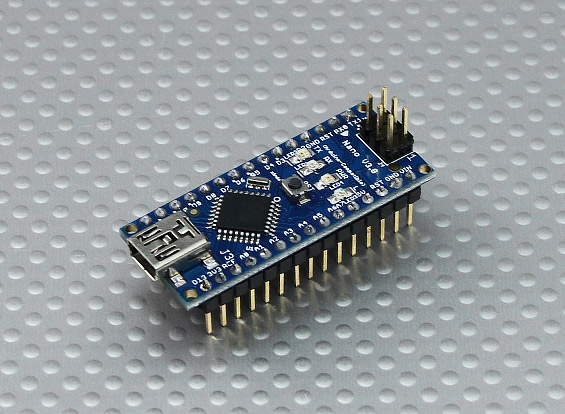
HeadTracker состоит из двух частей: из датчика положения и Arduino Nano.
Сначала нужно купить датчик положения и Ардуино. Я использовал такой c eBay: "Nine Axis Degree of Freedom IMU Sensor ITG/3200/ITG3205 ADXL345 HMC5883L Module"

(извините, вставка ссылок не работает на трёх браузерах, введите это название в поиске EBay)
Arduino Nano V3.0 продаётся на Паркфлаере.
Дальше нужно только ждать.
Когда мы всё это получим, нужно припаять контактную колодку к датчику положения. Если опыта достаточно, то можно спаять всё самостоятельно, но если опыта нет или не хотите рисковать, лучше обратиться в ремонт мобильных, там могут припаять. У меня опыта хватило, за 5 минут я припаял контакты с помощью паяльника 30Ватт с тонким жалом.
Потом нужно соединить датчик положения с Ардуино. У меня использовались провода с стандартными разъёмами для сервоприводов (по 3 см). Слева будет датчик положения, справа Ардуино.
VCC-IN------5V
GND----------GND
SCL-----------A5
SDA-----------A4
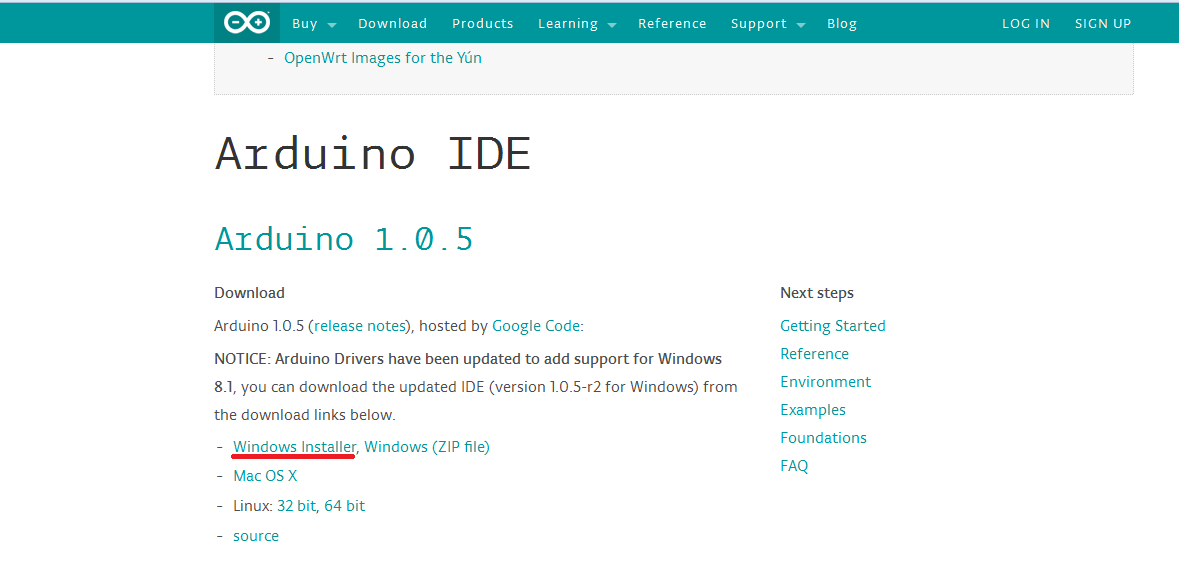
Теперь нужно прошить Ардуино. Ищем в любой поисковой системе "Arduino IDE". Переходим на официальный сайт и скачиваем прошивку 1,0,5 (я использовал такую).
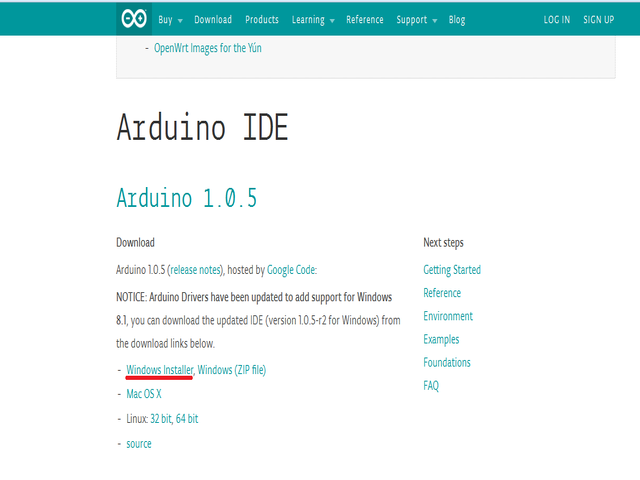
Нажимаем на Windows Installer (если компьютер на Windows). Скачиваем, подключаем Ардуино через USB, открываем скачанное приложение, нажимаем далее, пока программа не начнёт прошивать. Всё делается автоматически.
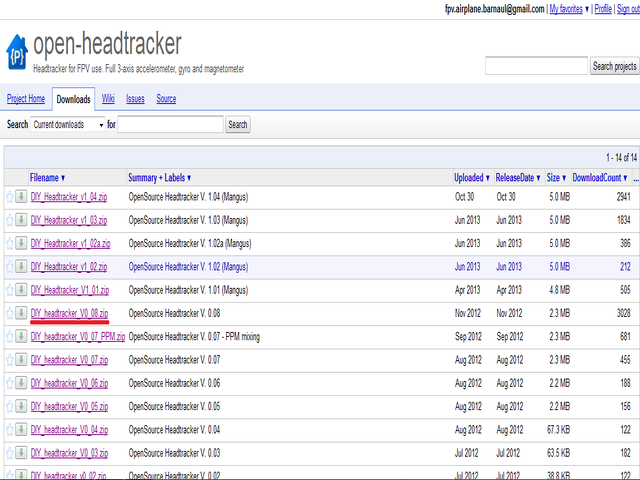
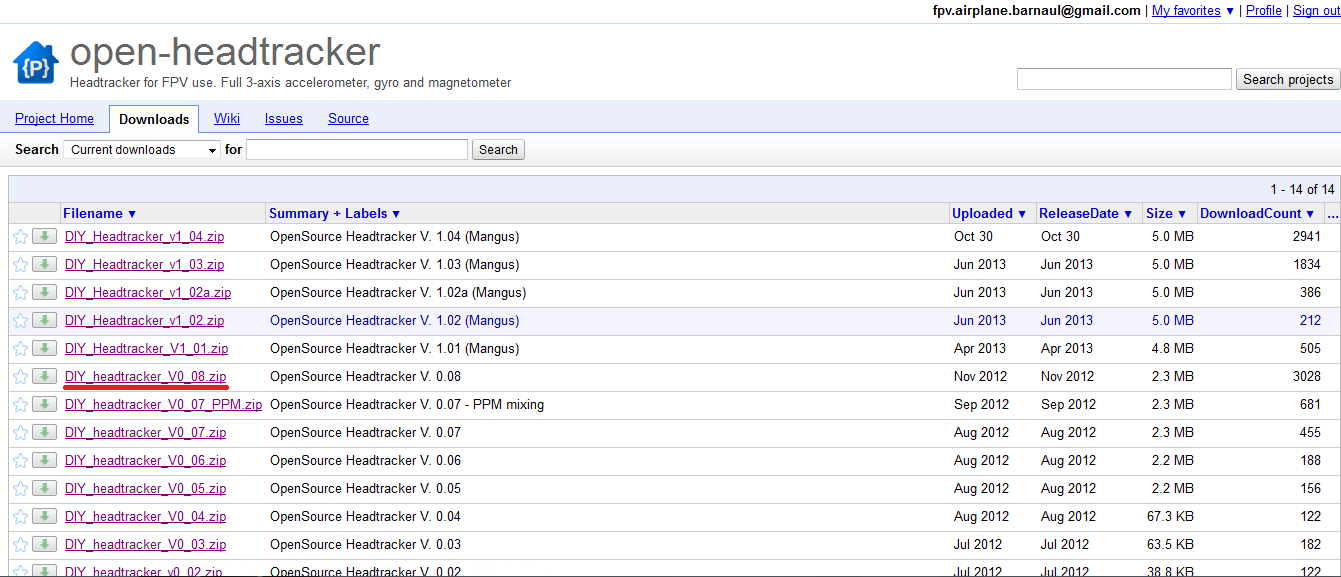
Потом идём на сайт "code/google.com/p/open-headtracker/" (скопировать без кавычек и вставить в адресную строку). Переходим в вкладку "Downloads" и скачиваем версию 0,08
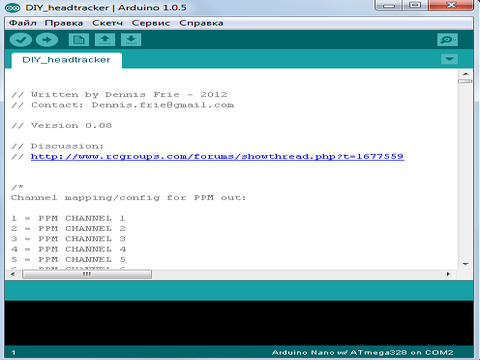
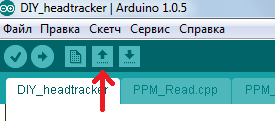
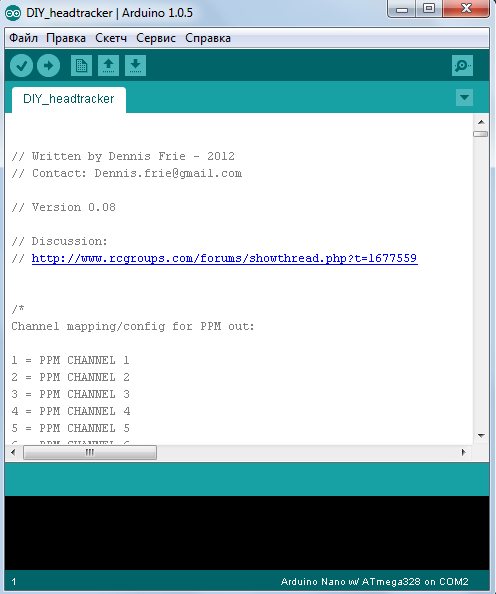
Открываем скачанный файл. Ищем внутри программу "DIY HeadTracker". Открываем его. Должно быть как на фото ниже:
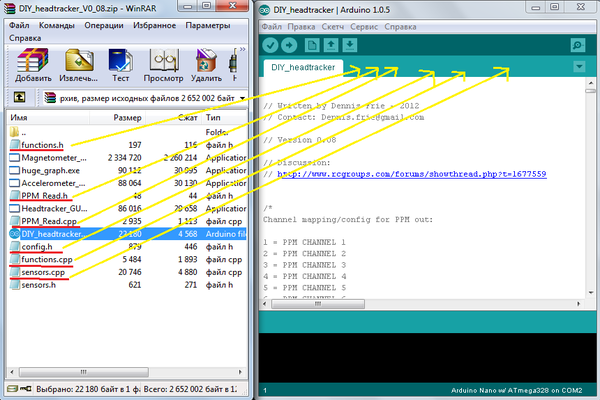
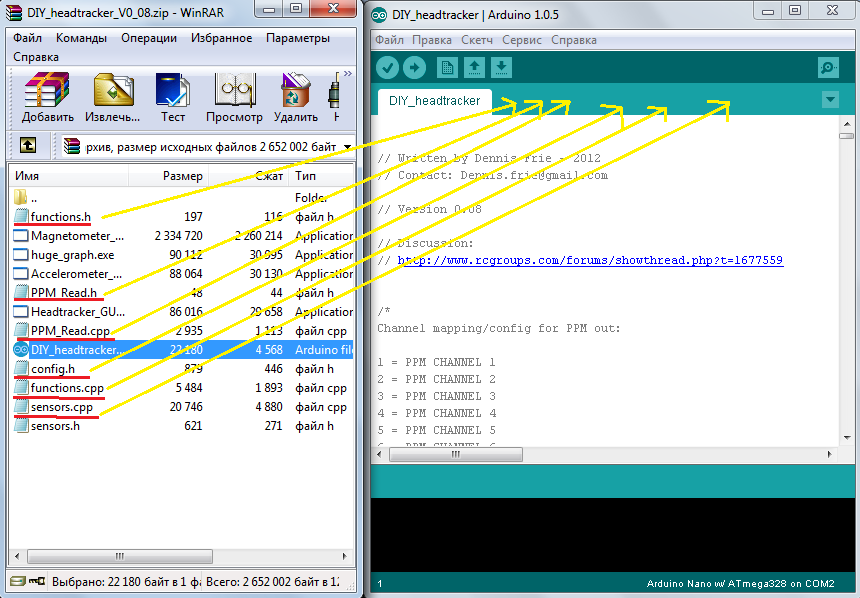
Чтобы поставить ПО для хедтрекера, этого недостаточно. Переносим то, что я отметил красным в программу:
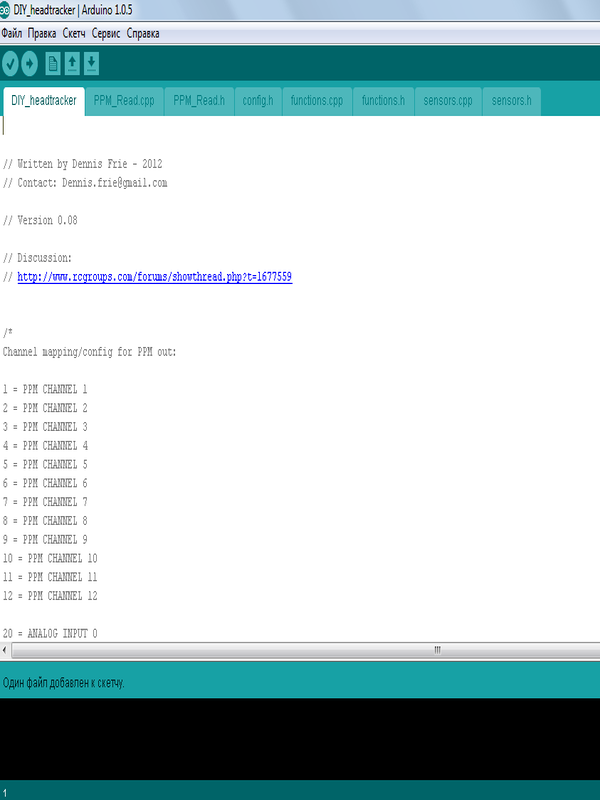
В результате должно получиться так:
Такое количество фотографий нужно для того, чтобы вы не ходили между трёх сосен, пытаясь найти причину неисправности. Мне потребовалось 3 часа, чтобы понять причину ошибки при компиляции. Потом нужно нажать "Сервис"->"Плата". Нужно выбрать Arduino Nano w/ATmega328. Потом нужно выбрать "Сервис"-"Последовательный порт" и поставить СОМ порт. Чтобы узнать какой порт используется, нужно зайти в "Устройства и принтеры" и найти наше устройство. Далее нужно нажать на кнопку компиляции:
Если вы всё сделали правильно, то компиляция пройдёт успешно. Если нет, то нужно изменить СОМ порт контроллера.
Закрываем программу. Открываем программу Magnetrometer. Устанавливаем СОМ порт. Жмём кнопку "Connect" Потом начинаем калибровку. Устанавливаем датчик положения в горизонтальную плоскость, жмём SET, поворачиваем датчик на 180 градусов (по картинкам понятно, в какое положение нужно ставить), нажимаем на SET, возвращаяем в первоначальное положение и переворачиваем, нажимаем кнопку SET. Потом нужно сохранить результаты, нажав на кнопку SAVE. Можно закрывать программу.
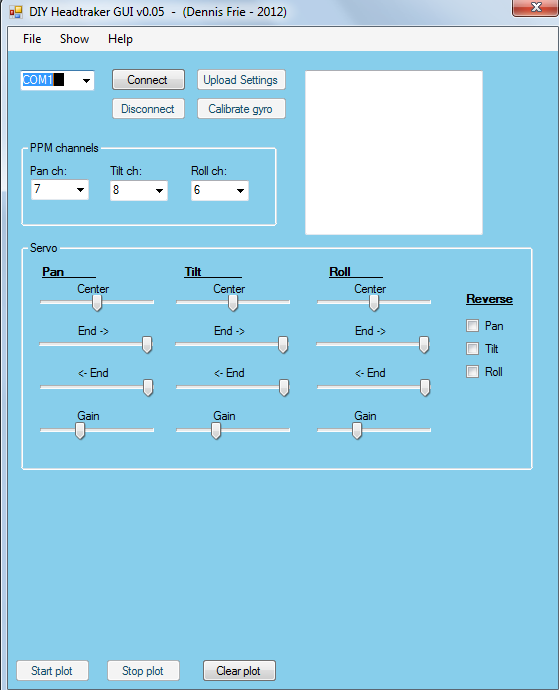
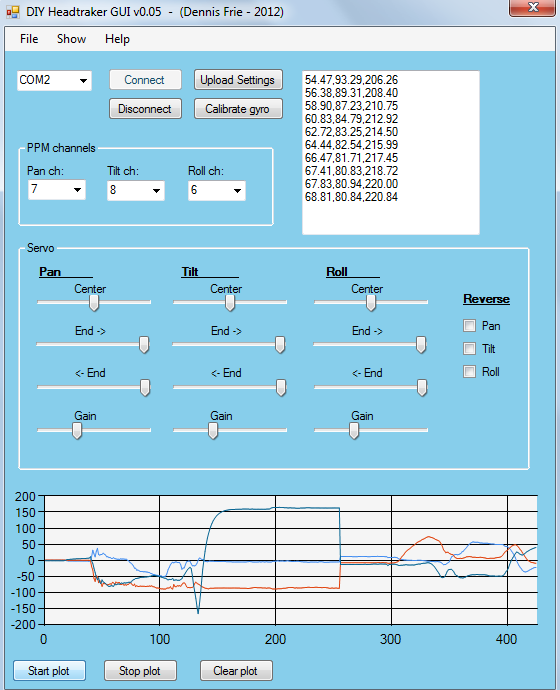
Ищем программу "DIY HeadTracker GUI" Выбираем СОМ порт и нажимаем Connect.
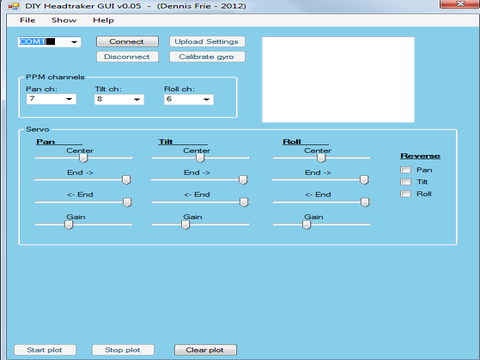
Нажимаем Start plot. Если вы сделали всё правильно, то вы увидете графики положения хедтрекера.

Можно сказать, что настройка подошла к концу. Осталось только проставить в этой же программе реверсы, конечные точки, чувствительность датчика, нумерацию каналов управления камерой.
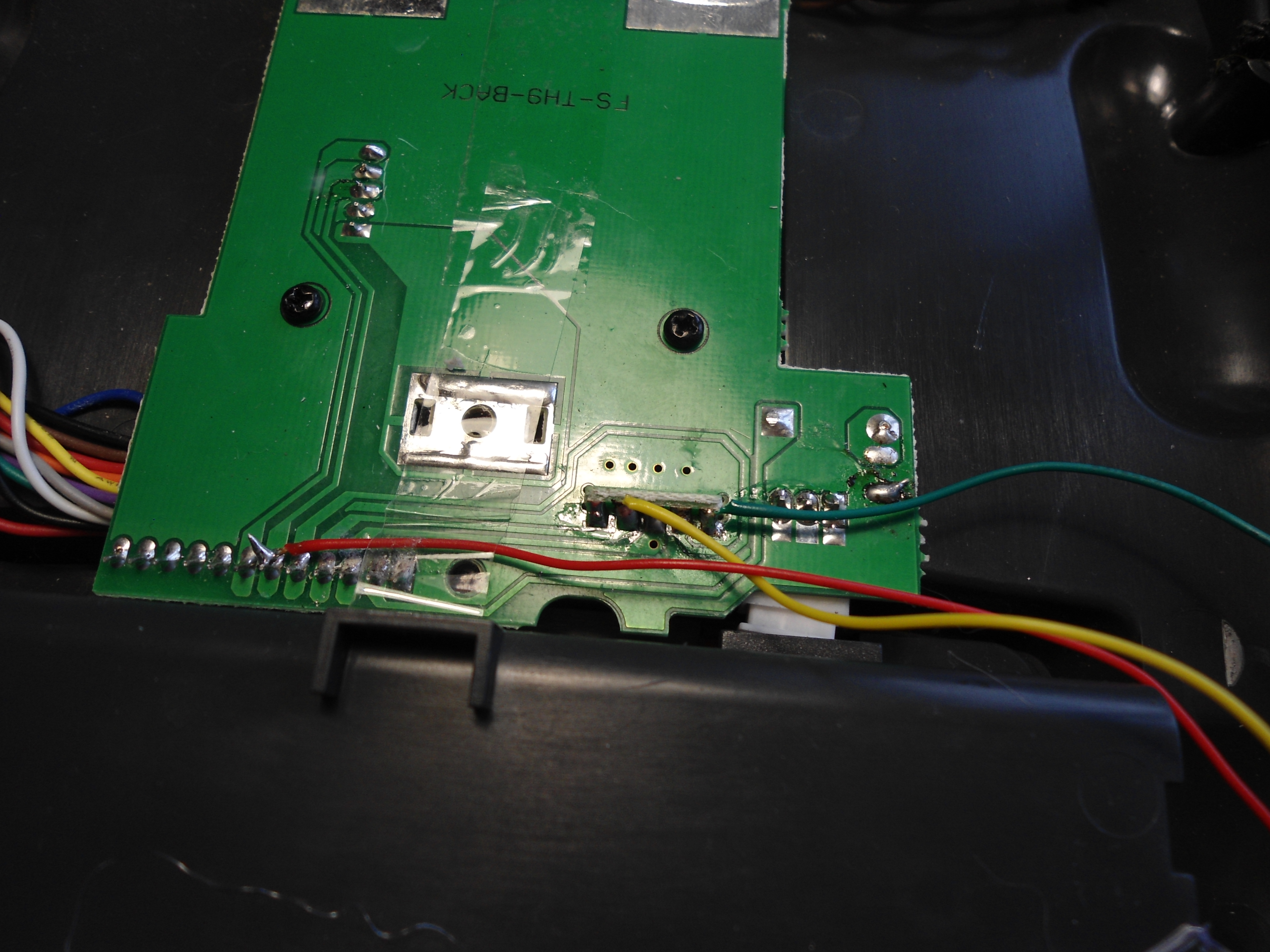
Дальше нужно соединить плату ардуино и пульт. У меня Turnigy 9X. Проблема в том, что подключить через тренер-порт не получится: там нет питания 12В. Там только PPM и минусовой контакт.
Вскрываем пульт.
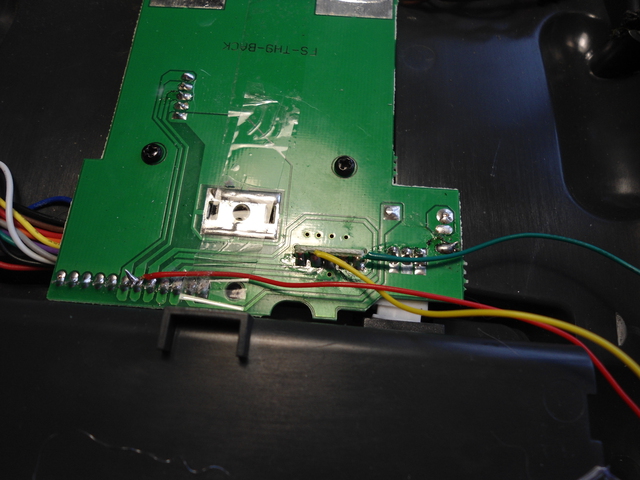
Красный: питание 12В, жёлтый: РРМ сигнал, зелёный: земля. Чтобы соединить хедтрекер с пультом, нужно подключить так: слева контакты пульта, справа контакты хедтрекера.
Красный (+)-------VIN
Жёлтый (РРМ)-----D9
Зелёный (-)--------GND
Разъём вывел через бок аппаратуры, убрав разъём для подзарядки.
Теперь нужно назначить каналы управления камеры в режиме "тренера". На этом всё. Если будут вопросы: с радостью помогу.
Цена DiY хедтрекера составляет 600 рублей против FatShark Trinity за 4500 рублей. Экономия на лицо.
У хедтрекера имеется 3 оси управления. В прошлой моей статье многие сомневались что пишу я. Если не верите, я могу подтвердить это через видеозвонок Skype
Меня всегда манила возможность осматриваться в полёте, получая необыкновенные ощущения реального полёта. Даже во время первых полётов в очках я самопроизвольно поворачивал голову.
На картинке показан пробный вариант хедтрекера. Почему пробный? Потому что я просто хотел проверить, может ли работать это чудо. Конечно, можно сделать красивый корпус, поставить термоусадку, но я решил не усложнять проект.
HeadTracker состоит из двух частей: из датчика положения и Arduino Nano.
Сначала нужно купить датчик положения и Ардуино. Я использовал такой c eBay: "Nine Axis Degree of Freedom IMU Sensor ITG/3200/ITG3205 ADXL345 HMC5883L Module"

(извините, вставка ссылок не работает на трёх браузерах, введите это название в поиске EBay)
Arduino Nano V3.0 продаётся на Паркфлаере.
Дальше нужно только ждать.
Когда мы всё это получим, нужно припаять контактную колодку к датчику положения. Если опыта достаточно, то можно спаять всё самостоятельно, но если опыта нет или не хотите рисковать, лучше обратиться в ремонт мобильных, там могут припаять. У меня опыта хватило, за 5 минут я припаял контакты с помощью паяльника 30Ватт с тонким жалом.
Потом нужно соединить датчик положения с Ардуино. У меня использовались провода с стандартными разъёмами для сервоприводов (по 3 см). Слева будет датчик положения, справа Ардуино.
VCC-IN------5V
GND----------GND
SCL-----------A5
SDA-----------A4
Теперь нужно прошить Ардуино. Ищем в любой поисковой системе "Arduino IDE". Переходим на официальный сайт и скачиваем прошивку 1,0,5 (я использовал такую).
Нажимаем на Windows Installer (если компьютер на Windows). Скачиваем, подключаем Ардуино через USB, открываем скачанное приложение, нажимаем далее, пока программа не начнёт прошивать. Всё делается автоматически.
Потом идём на сайт "code/google.com/p/open-headtracker/" (скопировать без кавычек и вставить в адресную строку). Переходим в вкладку "Downloads" и скачиваем версию 0,08
Открываем скачанный файл. Ищем внутри программу "DIY HeadTracker". Открываем его. Должно быть как на фото ниже:
Чтобы поставить ПО для хедтрекера, этого недостаточно. Переносим то, что я отметил красным в программу:
В результате должно получиться так:

Такое количество фотографий нужно для того, чтобы вы не ходили между трёх сосен, пытаясь найти причину неисправности. Мне потребовалось 3 часа, чтобы понять причину ошибки при компиляции. Потом нужно нажать "Сервис"->"Плата". Нужно выбрать Arduino Nano w/ATmega328. Потом нужно выбрать "Сервис"-"Последовательный порт" и поставить СОМ порт. Чтобы узнать какой порт используется, нужно зайти в "Устройства и принтеры" и найти наше устройство. Далее нужно нажать на кнопку компиляции:

Если вы всё сделали правильно, то компиляция пройдёт успешно. Если нет, то нужно изменить СОМ порт контроллера.
Закрываем программу. Открываем программу Magnetrometer. Устанавливаем СОМ порт. Жмём кнопку "Connect" Потом начинаем калибровку. Устанавливаем датчик положения в горизонтальную плоскость, жмём SET, поворачиваем датчик на 180 градусов (по картинкам понятно, в какое положение нужно ставить), нажимаем на SET, возвращаяем в первоначальное положение и переворачиваем, нажимаем кнопку SET. Потом нужно сохранить результаты, нажав на кнопку SAVE. Можно закрывать программу.
Ищем программу "DIY HeadTracker GUI" Выбираем СОМ порт и нажимаем Connect.
Нажимаем Start plot. Если вы сделали всё правильно, то вы увидете графики положения хедтрекера.
Можно сказать, что настройка подошла к концу. Осталось только проставить в этой же программе реверсы, конечные точки, чувствительность датчика, нумерацию каналов управления камерой.
Дальше нужно соединить плату ардуино и пульт. У меня Turnigy 9X. Проблема в том, что подключить через тренер-порт не получится: там нет питания 12В. Там только PPM и минусовой контакт.
Вскрываем пульт.
Красный: питание 12В, жёлтый: РРМ сигнал, зелёный: земля. Чтобы соединить хедтрекер с пультом, нужно подключить так: слева контакты пульта, справа контакты хедтрекера.
Красный (+)-------VIN
Жёлтый (РРМ)-----D9
Зелёный (-)--------GND
Разъём вывел через бок аппаратуры, убрав разъём для подзарядки.
Теперь нужно назначить каналы управления камеры в режиме "тренера". На этом всё. Если будут вопросы: с радостью помогу.
Цена DiY хедтрекера составляет 600 рублей против FatShark Trinity за 4500 рублей. Экономия на лицо.
У хедтрекера имеется 3 оси управления. В прошлой моей статье многие сомневались что пишу я. Если не верите, я могу подтвердить это через видеозвонок Skype













Решил собрать и себе такую штуку, но возник вопрос, а куда подключать кнопку "центровки"? если таковая есть?
404. That's an error.
The project open-headtracker was not found.
нет там архива. где ещё можно скачать?
по оси PAN все чудно работает, а отклонение от нейтрали по оси TILT вызывает беспорядочные скачки по PAN
кто знает, как побороть?
Версия 1.04 вполне рабочая.
Лично я связал хэдтрекер с турнигой 4-х проводным кабелем (от шнурка mini-usb в usb). В качестве разъема использовал usb. +5В и землю взял с контактов крутилки. В качестве кнопки центровки использовал тумблер тренерского переключателя. Всё равно он не используется и работает как надо - в качестве кнопки, т.е. не фиксируется.