
Первое летающее крыло было мной построено еще летом 2013 года. В своем дневнике  Летающее крыло из пенокартона.+71
Летающее крыло из пенокартона.+71
16 августа 2013 года в 14:04 | Александр Н Санкт-Петербург
 Статья http://www.parkflyer.ru/blogs/view_entry/2090/
я рассказывал о постройке модели из пенокартона, а также о летных испытаниях
Статья http://www.parkflyer.ru/blogs/view_entry/2090/
я рассказывал о постройке модели из пенокартона, а также о летных испытаниях  Настройка и полетные испытания летающего крыла.+41
Настройка и полетные испытания летающего крыла.+41
27 августа 2013 года в 07:34 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2170/
Воодушевленный успехами при постройке и тестировании модели, решил делать летающее крыло новой конструкции Летающее крыло для любительской фото и видео съемки.+89
Летающее крыло для любительской фото и видео съемки.+89
19 сентября 2013 года в 19:27 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2360/
.
Причинами такого решения послужили следующие факторы: во-первых возникла трудность с транспортировкой и требуется разборная конструкция, во-вторых в летающем крыле не так то просто разместить всю электронику, она просто внутрь не помещается, ее приходится крепить прямо на поверхность крыла.
Но и второе летающее крыло оказалось не совсем то, что мне было нужно. Места в нем оказалось не так уж и много, как мне первоначально казалось. Тем более мне пришлось перейти на другой тип автопилота. FY31AP был заменен на AIOP, а в последствии на APM 2.5.2. Аккумуляторы были заменены на батареи большой емкости, после чего место закончилось.
Долго мучился я в раздумьях делать самолет самому или купить. Рассматривал различные варианты:
- Darkwing.jpg) Летающее крыло Darkwing для FPV, размахом 1727 мм из стеклоткани (ARF)
Летающее крыло Darkwing для FPV, размахом 1727 мм из стеклоткани (ARF)
Товар http://www.parkflyer.ru/product/393428/
- FX-79 Buffalo.jpg) FX-79 Buffalo FPV Flying Wing EPO Airplane 2000mm (PNF)
FX-79 Buffalo FPV Flying Wing EPO Airplane 2000mm (PNF)
Товар http://www.parkflyer.ru/product/1471714/
- Go Discover.jpg) FPV носитель HobbyKing® ™ Go Discover, EPO, 1600мм, Набор (Kit)
FPV носитель HobbyKing® ™ Go Discover, EPO, 1600мм, Набор (Kit)
Товар http://www.parkflyer.ru/product/1187029/
- Skywalker X7 Летающее крыло Skywalker X7
Летающее крыло Skywalker X7
Товар http://www.parkflyer.ru/product/1202014/
- Skywalker X8.jpg) Летающее крыло Skywalker X-8 (2120 мм, EPO)
Летающее крыло Skywalker X-8 (2120 мм, EPO)
Товар http://www.parkflyer.ru/product/527758/
- RVJET Супер крыло RVJET(черный)
Супер крыло RVJET(черный)
Товар http://www.parkflyer.ru/product/1182561/
Но особенно вызвало улыбку вот это предложение Летающее крыло Skywalker X8 2014 (полный комплект для FPV с антенным трекером)
Летающее крыло Skywalker X8 2014 (полный комплект для FPV с антенным трекером)
Товар http://www.parkflyer.ru/product/1491039/
Я прекрасно понимал, что закупив материалы для проекта, потрачу приблизительно половину денег, но такой же, как продается самолет, мне точно не сделать. В итоге мой выбор пал на летающее крыло Skywalker X8. По сравнению со всеми рассмотренными он мне показался наиболее вместительным и по цене приемлемым.
Предварительно скачал и изучил инструкцию, размещенную на fpvmodel.com http://www.fpvmodel.com/u/goods_data/2014-10/20141020133838-7568.doc . Так же прочитал всю ветку форума на rcdesign-е, посвященную Х8 http://forum.rcdesign.ru/f90/thread265215-105.html .
Заказ оформил с bevrc.com http://www.bevrc.com/latest-2014-version-skywalker-x8black_p742.html?pid=742 , тем более, что от туда при заказе на сумму больше 200$ доставка EMS-ом бесплатная. Для того чтобы воспользоваться данной опцией взял еще рекомендуемый двигатель http://www.bevrc.com/gs35485-kv830_p680.html .
Конфигурация предполагалась следующая:
Сервы - Hitec 82MG Hitec HS-82MG Микро сервомашинка с металлическим редуктором 2.8kg/19g/0.12sec
Hitec HS-82MG Микро сервомашинка с металлическим редуктором 2.8kg/19g/0.12sec
Товар http://www.parkflyer.ru/product/9814/
Регулятор скорости - Turnigy SuperBrain 80A Turnigy Super Brain 80A Brushless ESC
Turnigy Super Brain 80A Brushless ESC
Товар http://www.parkflyer.ru/product/100103/
Мотор - GS3548 kv830 http://www.bevrc.com/gs35485-kv830_p680.html
Пропеллер складной - 12х6 Лопасти для складывающегося пропеллера Aeronaut CAM (Rudi Freudenthaler)
Лопасти для складывающегося пропеллера Aeronaut CAM (Rudi Freudenthaler)
Товар http://www.parkflyer.ru/product/190472/
Аккумуляторные батареи - Turnigy 4s 5000mAh 40С Аккумулятор литий-полимерный Turnigy 5000мАч 4S 40C
Аккумулятор литий-полимерный Turnigy 5000мАч 4S 40C
Товар http://www.parkflyer.ru/product/10307/
Автопилот APM 2.5.2 RCTimer ArduFlyer V2.5.2 Flight Controller(Top Pin Version)
RCTimer ArduFlyer V2.5.2 Flight Controller(Top Pin Version)
Товар http://www.parkflyer.ru/product/1525839/
По сути дела все комплектующие у меня имелись, кроме двигателя, который я заказал в довесок к тушке.
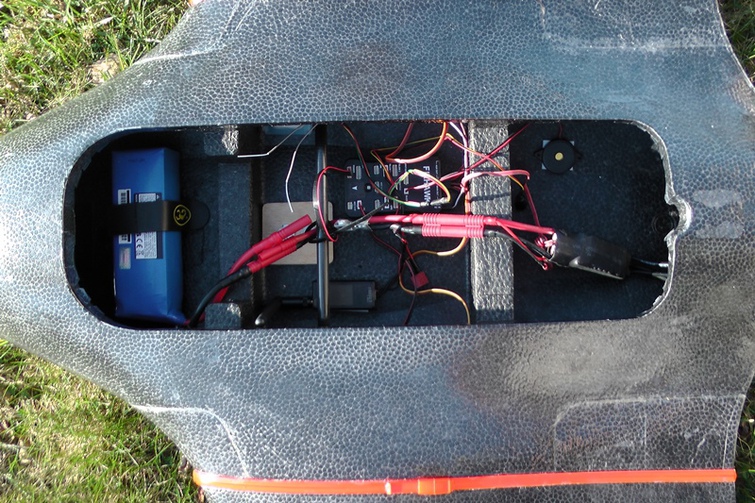
После пары недель ожидания получил огромную коробку, которую курьерская служба ЕМС не особо хотела доставлять. При отслеживании трека появлялись сообщения о неудачных попытках вручения, поэтому пришлось ехать получать самому.
Первое впечатление - какой же он огромный. На фотографии сложно оценить размер, но батареи 4S 5000 просто теряются в его недрах.




Приступил к склеиванию центральной части фюзеляжа.
Клеить решил на правильный клей – UHU POR. В гипермаркетах Оби в Санкт-Петербурге данный клей продавать перестали, менеджеры сказали, что спроса на него нет. Купить пару тюбиков удалось в «Хобби острове».

Для установки мотора производитель предлагает пластиковый стакан, но при перегреве мотора пластик может «поплыть».


К тому же пластиковое крепление предполагает установку мотора внутри стакана, что усложняет обслуживание силовой установки. Взвесив все за и против, я сделал фанерное основание.




Фанерку выпилил чуть больше, пену немного примял и приклеил.


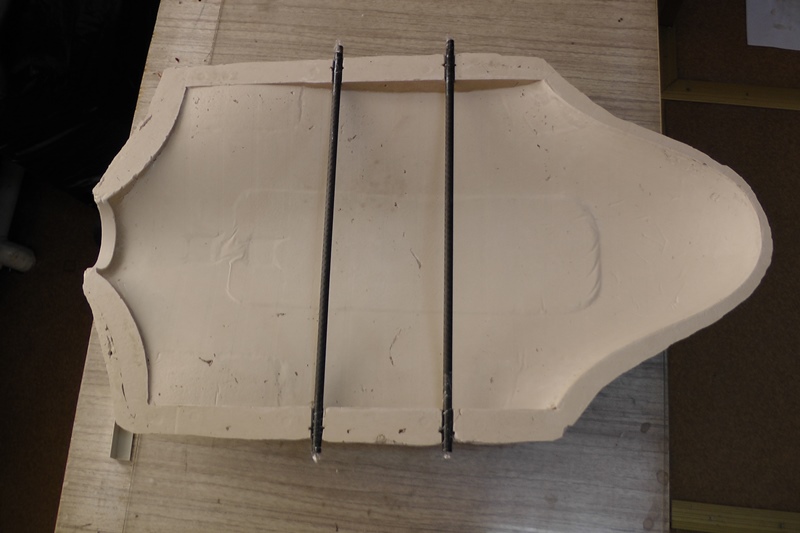
После высыхания клея фюзеляж оклеил скотчем и заложил формы из гипсовой смеси. Зачем мне формы из гипса? Что бы можно было повторить, например, из стекловолокна и эпоксидной смолы. Если снимать формы, то это нужно делать в самом начале постройки, иначе после первой морковки снимать уже будет бессмысленно. Понадобится или нет, пока для себя не решил, как говорится “пусть будет”.

Основным материалом для изготовления форм послужил «Ротбанд», который остался после ремонта.
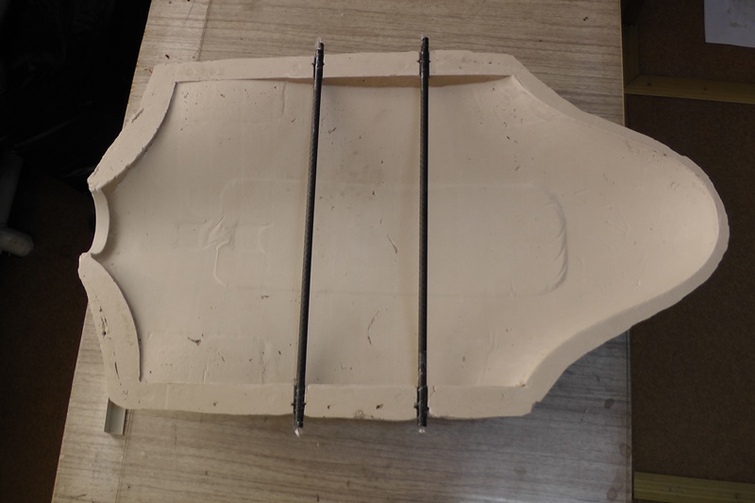
Из реек и листа ДВП сделал отбортовку. Чтобы гипс не прилипал к рабочей поверхности, оклеил ее скотчем. Отбортовку закрепил проволокой к трубам, усиливающим крылья.

Верхняя половина готова. Остается дождаться застывания раствора и снять форму.

Через пару дней снял отбортовку. Край получился идеальный.

Благодаря скотчу гипсовая смесь к корпусу практически не прилипает.



Теперь можно делать вторую половинку.




Крышку лючка сделал отдельно, получилось три гипсовых формы фюзеляжа.

Так как имелись небольшие изъяны на поверхности форм, то слегка прошелся тонкой шпатлевкой.
В то время, как шел процесс изготовления матриц, а он оказался достаточно длительным, у меня появилось время, чтобы заняться крыльями.
Сервоприводы предполагались Hitec 82MG, но выяснилось, что после предыдущего сезона осталась живой только одна серва. Нужно было покупать новую.
В итоге я взял зарекомендовавшие себя среди моделистов той же фирмы цифровые сервы 5085MG Hitec HS-5085MG Digital Servo
Hitec HS-5085MG Digital Servo
Товар http://www.parkflyer.ru/product/112524/
У цифровых и усилие будет побольше, что не маловажно для большой модели.
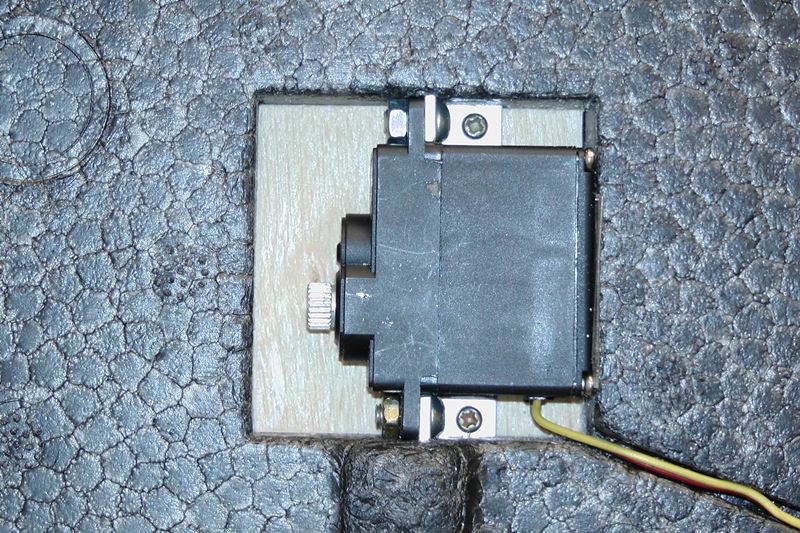
В крыльях предусмотрены отверстия под стандартные сервомашинки размером 40х40 мм, но многие ставят размера мини. Покрутив в руках кусочек фанеры и сервопривод, решение пришло само собой. Основание выпилил из 3 мм фанеры, а крепление сервопривода к фанере сделал из алюминиевого уголка.
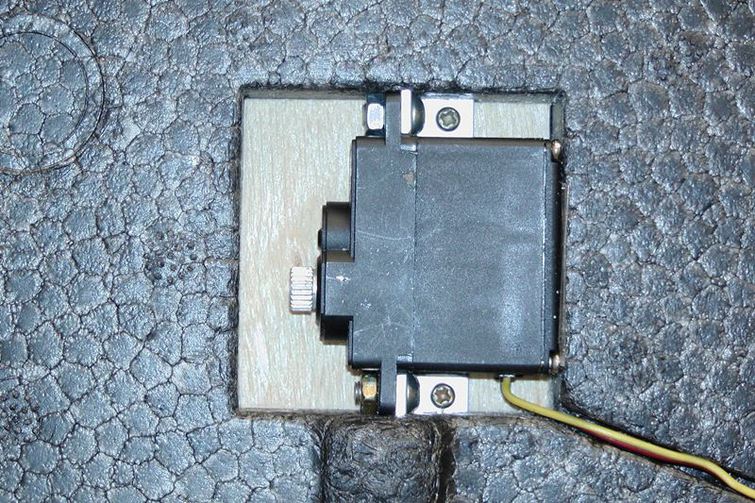
Сервомашинки легко извлекаются для технического обслуживания или замены.
Качалки решил не подрезать, а сделать выемку в креплении. В случае поломки одного плеча можно будет перевернуть и использовать дальше, тем более место позволяет.
.1432709617405.prev.JPG)
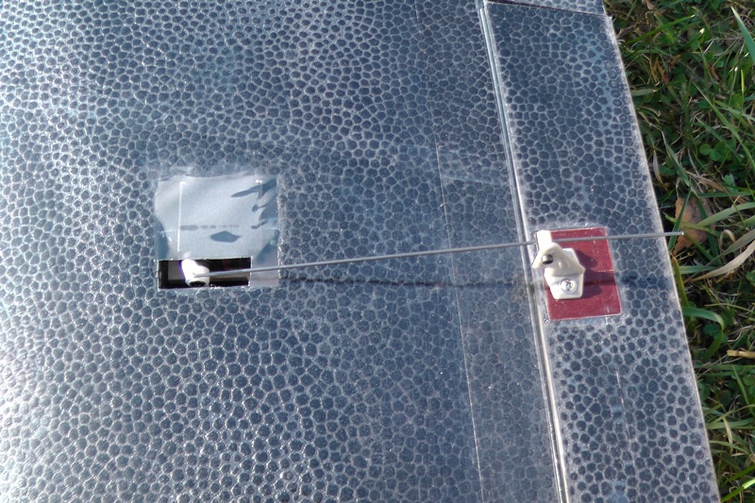
Так как запуск предполагался с катапульты и посадка по-самолетному на пузо, то сервоприводы решил перенести на верхнюю плоскость крыла.
.1432709648832.prev.JPG)
Можно было прорезать только отверстия под качалки, чтобы сделать тяги сверху крыла, но замеры показали, что длины качалок не хватает. Поэтому отверстия прорезал насквозь, отрезанные кубики вклеил на клей «Титан». Тут применил именно «Титан», так как он хорошо заполняет пустоты.
После примерки внутрь приклеил фанерные основания.
Далее нужно было решить, что делать с элевонами. Попробовал оставить на пене, но тугой ход и разный угол отклонения от центра к краю, я посчитал не приемлемым. Когда их отрезал, первое впечатление было, что какие же элевоны «жиденькие», нужно усиливать. Озадачившись этим вопросом, стал подбирать карбоновую планку или тонкую бальзу, но на форуме прочитал про технологию ламинирования и решил попробовать. Для этого на работе удалось найти пару листов пленки для ламинирования толщиной 150 мкм. Это был первый опыт, все получилось с первого раза, ничего сложного нет. Работал обычным утюгом, предварительно, подобрав температуру, главное не переборщить, иначе пена начинает пузыриться. После ламинирования элевоны было не узнать, они стали очень жесткими на кручение.
Перед ламинированием вклеил из тонкого гетинакса площадки под кабанчики. Кабанчики заменил на более надежные с креплением на саморезах Набор кабанчиков 20x27мм из полиоксиметилена (10шт)
Набор кабанчиков 20x27мм из полиоксиметилена (10шт)
Товар http://www.parkflyer.ru/product/8639/
. Элевоны навесил на обычный скотч без петель.

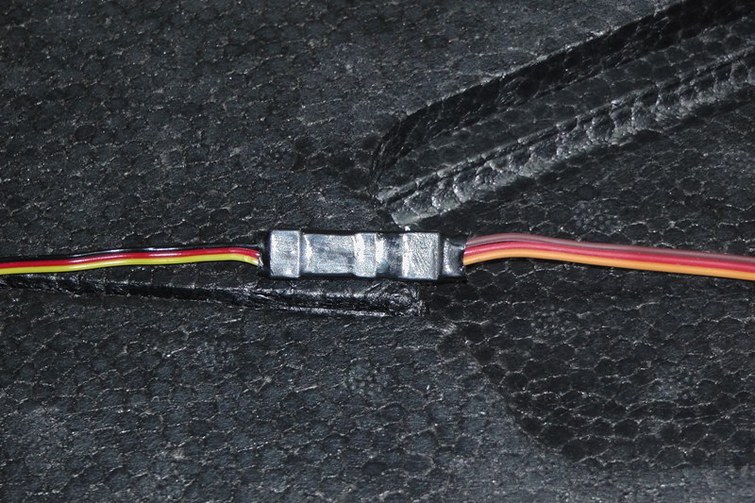
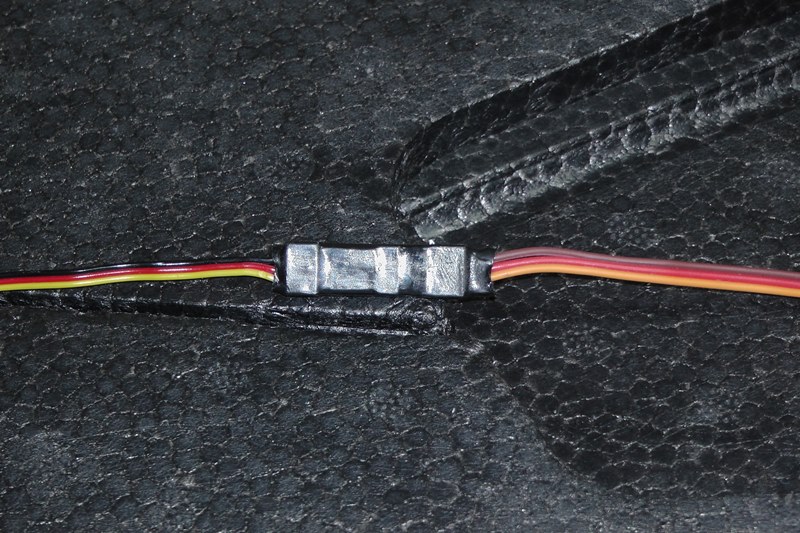
Чтобы не резать дырку в крыле вместо пластикового разъема использовал термоусадочную трубку. Так получается надежнее и компактнее.

Крепление винглетов решил переделать. Фанерки были уже приклеены, но держались не надежно и по краям практически отвалились.
Стандартно предполагается крепление винглетов саморезами. Но я в фанерки установил забивные гайки М3.




Теперь для установки винглетов использую пластиковые винты M3X10 нейлоновый винт (10 штук )
M3X10 нейлоновый винт (10 штук )
Товар http://www.parkflyer.ru/product/114943/
, чтобы при падении срезало шляпку.
Далее задумался по поводу защитного покрытия, что выбрать, скотч или пленку для ламинирования? Скотч ложится на черную пену не очень, смотрится только черный скотч. Пупырышки на поверхности проявлялись под скотчем, поэтому придется шкурить. Опыт ламинирования элевонов уже был, поэтому склонялся больше к пленке. Оставалось найти материал. Первоначально хотел купить пленку в рулоне, но нужного размера и толщины по цене меня не устраивала.
После долгих поисков нашел пленку для ламинирования формата А2 толщиной 75 мкм по очень интересной цене http://www.ancom-ink.ru/index.php?productID=16029. Вес одного пакета, состоящего из двух листов, составил 40 грамм. На весь самолет ушло 7 пакетов, причем было достаточно много обрезков, поэтому в общем к весу добавилось около 200 грамм.
Следует отметить преимущества пленки перед скотчем - это прочность и отсутствие многочисленных стыков.
Поверхности у Х8 не сложные и легко покрываются целыми листами. На фотографии видно, что для ламинирования крыла достаточно двух пакетов. Один лист вдоль, а другой поперек покрывают поверхность крыла полностью.


После ламинирования всех поверхностей, приклеил оранжевые пластиковые соединители крыльев. Уже приклеив, обнаружил, что отверстия под серво разъемы на крыльях расположены вдоль, а на фюзеляже – поперек. Дрель и напильник устранили данный недостаток.

Стандартное крепление лючка на шурупах мне не понравилось, пришлось заказать такие замочки Прочный замок для фонаря кабины (2шт.)
Прочный замок для фонаря кабины (2шт.)
Товар http://www.parkflyer.ru/product/996508/
. На внутреннюю переднюю поверхность крышки люка приклеил фиксатор из фанеры и замок сзади.

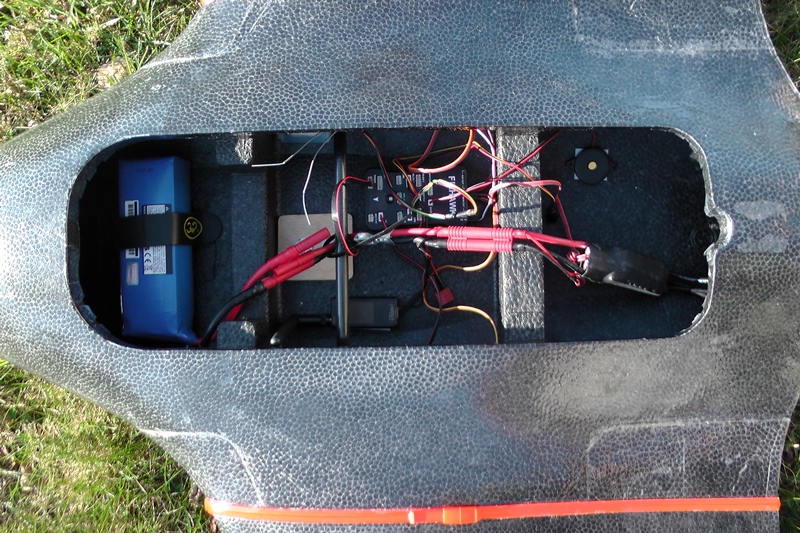
Установка электроники
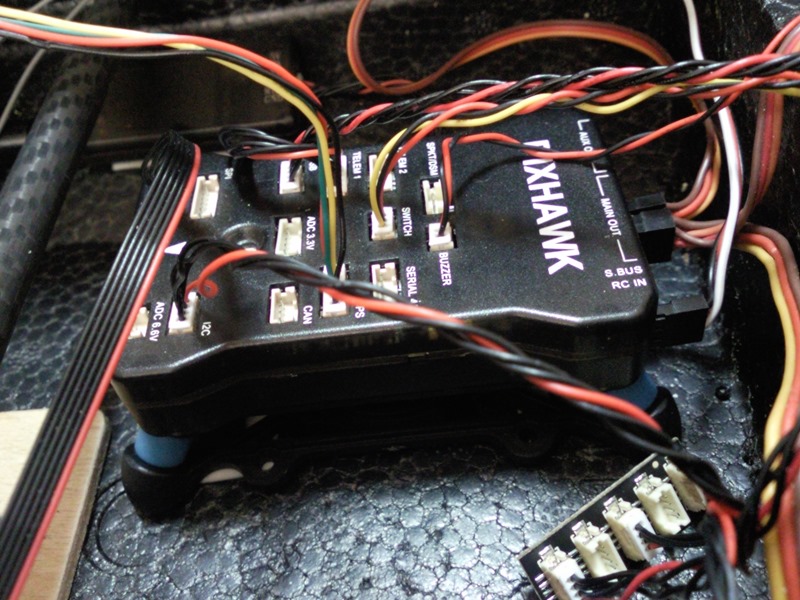
Вместо запланированного автопилота APM 2.5.2 в летающее крыло был установлен Pixhawk, а точнее его клон от RCTimer, который называется Fixhawk Rctimer Fixhawk/Pixhawk 32bit Flight Controller
Rctimer Fixhawk/Pixhawk 32bit Flight Controller
Товар http://www.parkflyer.ru/product/1469287/
.
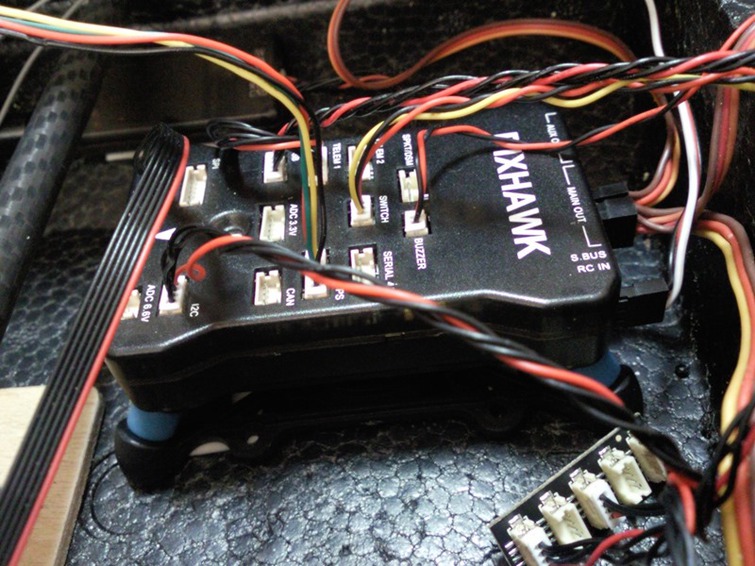
Контроллер установил на виброизоляционную платформу APM Flight Controller Damping Platform
APM Flight Controller Damping Platform
Товар http://www.parkflyer.ru/product/1644050/
Данную платформу уже использую на своих моделях, со своей задачей она отлично справляется.

Датчик тока из того же комплекта с RCTimer, он способен работать от батарей до 7S.
GPS-модуль самый обычный Neo-6M без компаса. Для самолета это не очень критично, тем более компас есть в полетном контроллере.
К автопилоту подключил приемник Futaba R6202SBW через порт SBUS одним проводом.
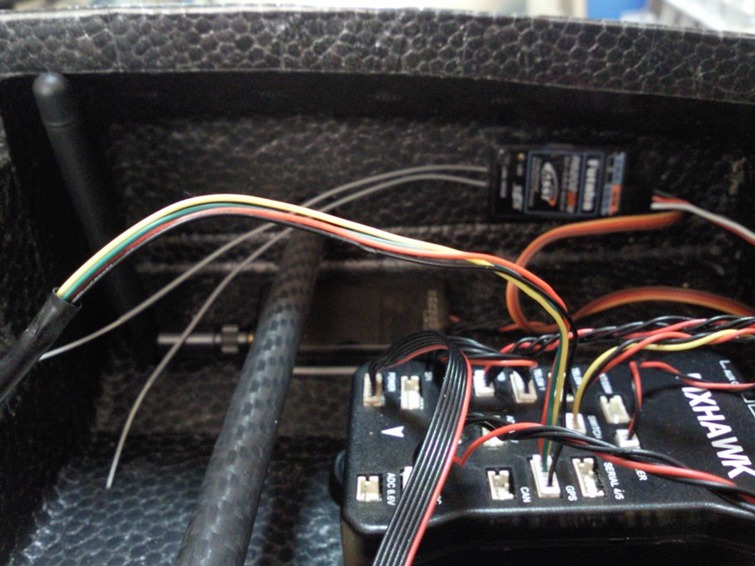
Радиомодемы второй версии на 900МГц HKPilot Transceiver Telemetry Radio Set V2 (915Mhz)
 HKPilot Transceiver Telemetry Radio Set V2 (915Mhz)
HKPilot Transceiver Telemetry Radio Set V2 (915Mhz)
Товар http://www.parkflyer.ru/product/1458492/
Датчик скорости установил цифровой.jpg) HKPilot 32 Digital Air Speed Sensor And Pitot Tube Set
HKPilot 32 Digital Air Speed Sensor And Pitot Tube Set
Товар http://www.parkflyer.ru/product/1481051/
но пока еще трубки не вывел. Причина очень простая, если при первом полете возникнет нештатная ситуация, чтобы не сломать. Тем более в ручном режиме и стабилизации он не используется, а первые тесты будут именно в этих полетных режимах.

Регулятор скорости установил Turnigy SuperBrain 80A Turnigy Super Brain 80A Brushless ESC
Товар http://www.parkflyer.ru/product/100103/
Данный регулятор побывал уже на многих моих моделях и пережил несколько моторов, которые сгорели после падений по различным причинам и были самостоятельно восстановлены  Перемотка бесколлекторного мотора – это легко.+204
Перемотка бесколлекторного мотора – это легко.+204
19 октября 2013 года в 13:18 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2647/
.

Сделал ограничители для отклонения лопастей складного пропеллера.
Зачем они нужны? При отклонении лопастей в сторону фюзеляжа винт может задевать за корпус. При полете с выключенным мотором пропеллер складывается и возможен перехлест лопастей.




В собранном виде пропеллер выглядит следующим образом.


На фотографии приведены максимальные углы отклонения лопастей складного пропеллера после установки ограничителей.
Настройка электроники
Прошивку загрузил с помощью MissionPlanner. Актуальная версия прошивки на момент написания статьи была ArduPlane 3.2.3. Сейчас вышла новая версия 3.3.0. Разработчики пишут о многочисленный изменениях, надо будет попробовать
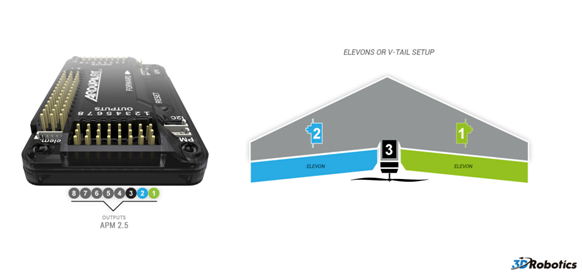
Сервоприводы и регулятор скорости подключил согласно приведенной на официальном сайте схемы.
Что касается настроек, все настраивается практически, так же как и для коптера.
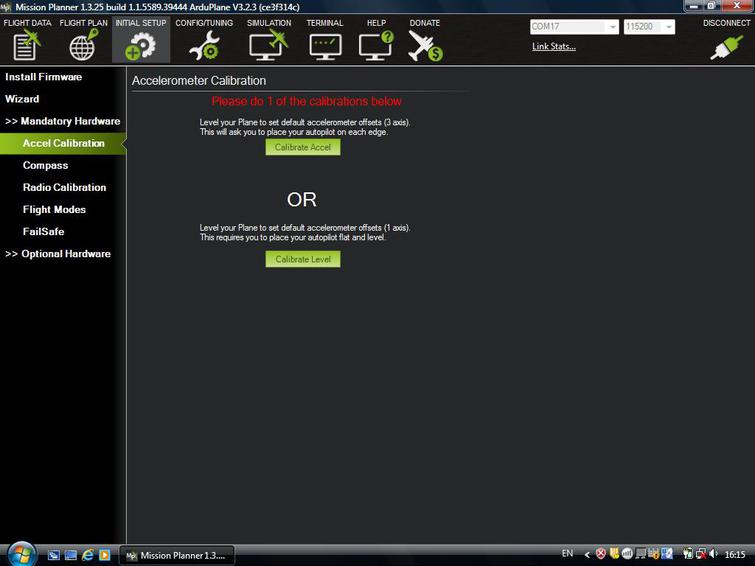
Первым делом выполняем основные настройки. Калибровка акселерометра может быть выполнена в одной плоскости или во всех. Самолет в собранном состоянии особо не покрутишь, поэтому можно откалибровать первым способом. Но в прошивке 3.3.0 убрали калибровку в одной плоскости.
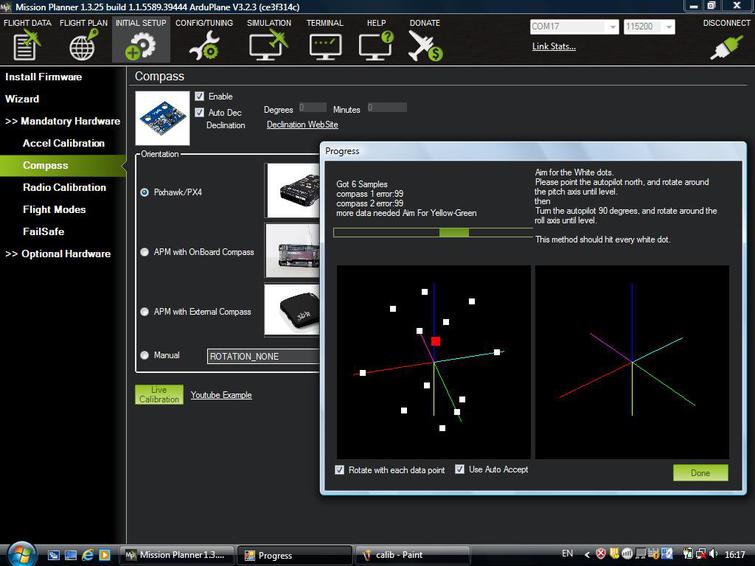
Калибровка компаса. Крутим-вертим самолет, пока не окрасится шар. При наличии внешнего компаса окрашиваться будет два шара.
Калибровка радиоуправления. Двигаем стики и переключатели для всех каналов. Проверяем, чтобы сигнал не выходил за пределы 1000-2000 мс.

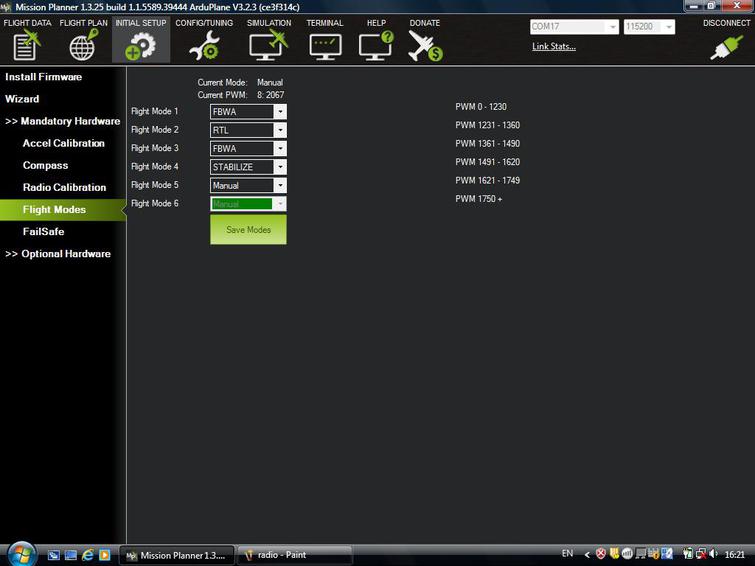
Полетные режимы в самолетной прошивке заведены на восьмой канал. Я выбрал для положения тумблера равным 0 ручной режим (manual), 1-режим стабилизации (stabilize), 2- FBWA.
Также настроил дополнительное оборудование, которое подключено к автопилоту.
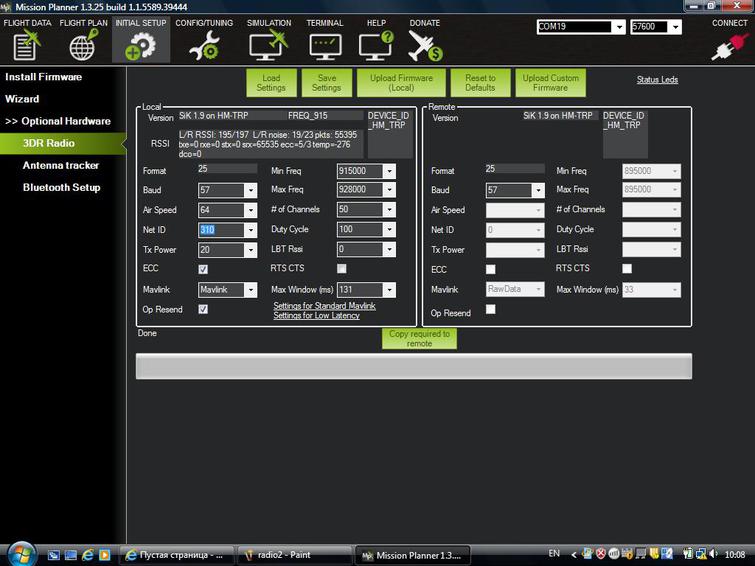
Радиомодемы не забываем настраивать. Первым делом, обязательно меняем номер канала NetID, чтобы снизить вероятность несанкционированного подключения. На данном ресурсе неоднократно упоминалось об угоне моделей, поэтому не стоит оставлять лазейку для злоумышленников. Не оставляйте значения, которые были записаны по умолчанию. Проверяем выходную мощность TX Power. Многие жалуются на дальность связи радиомодемов, для работы в режиме максимальной мощности должно быть выбрано значение равное 20, оно соответствует 100мВт.
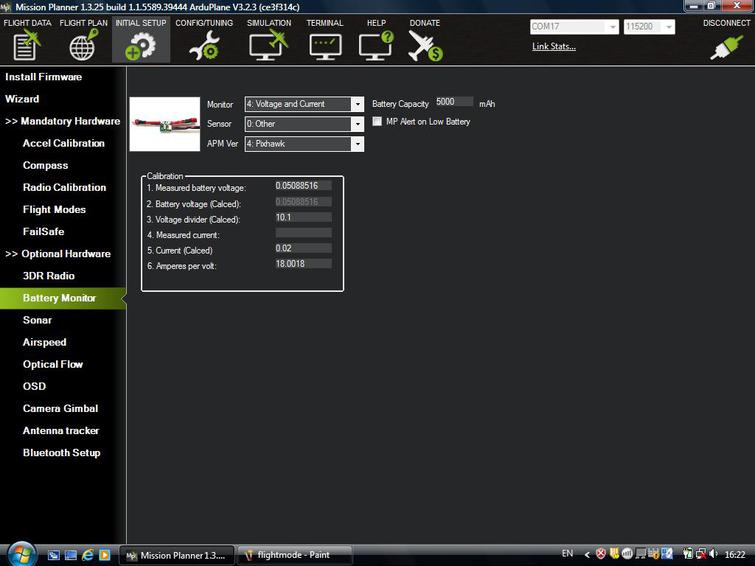
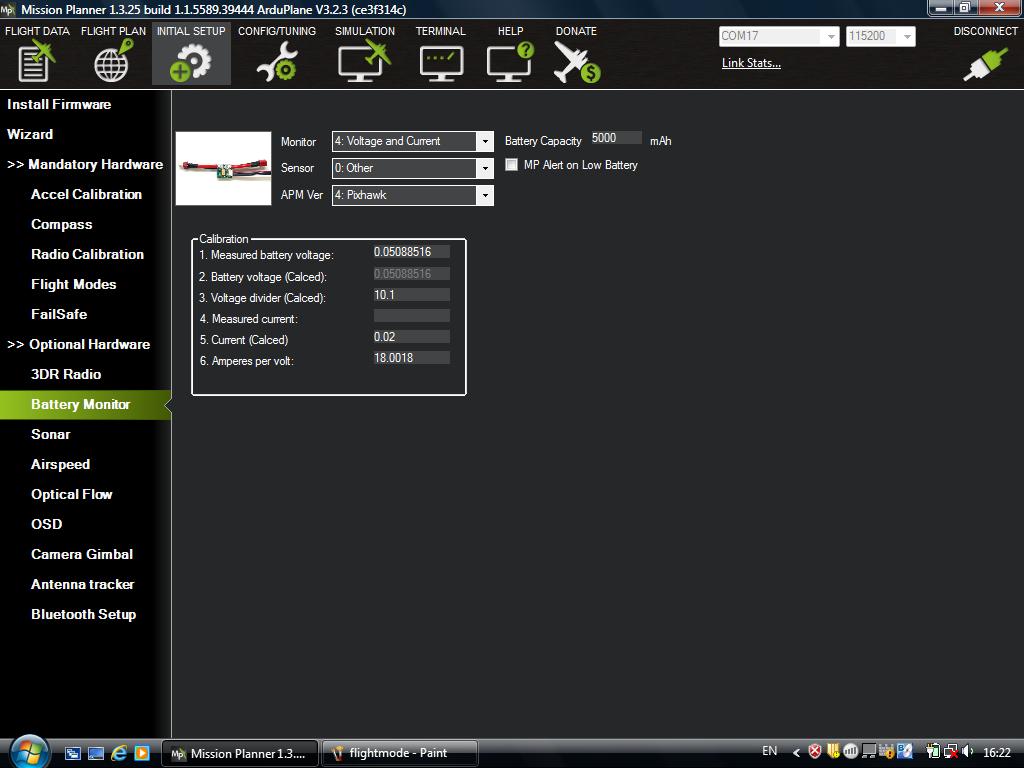
Датчик тока выбрал соответствующий в интерактивном меню, калибровку не выполнял, так как с заданными значениями отображаются адекватные данные о силовой батарее.
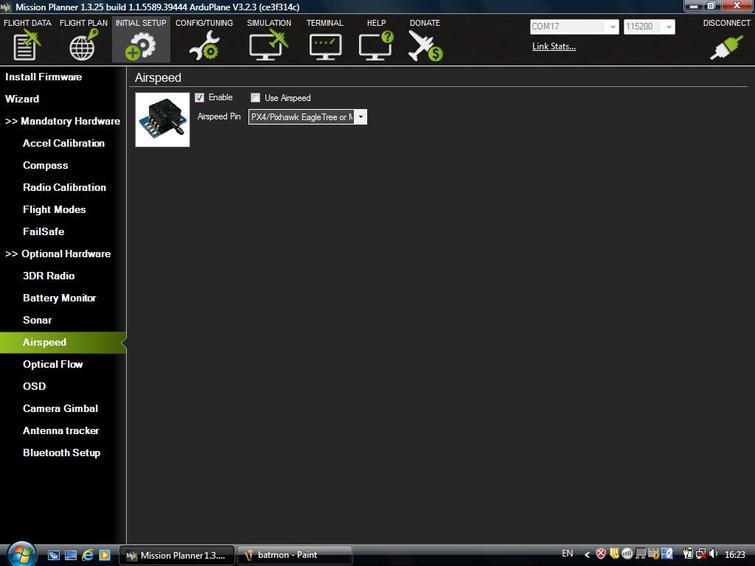
В соответствующей вкладке выбрал цифровой датчик воздушной скорости.
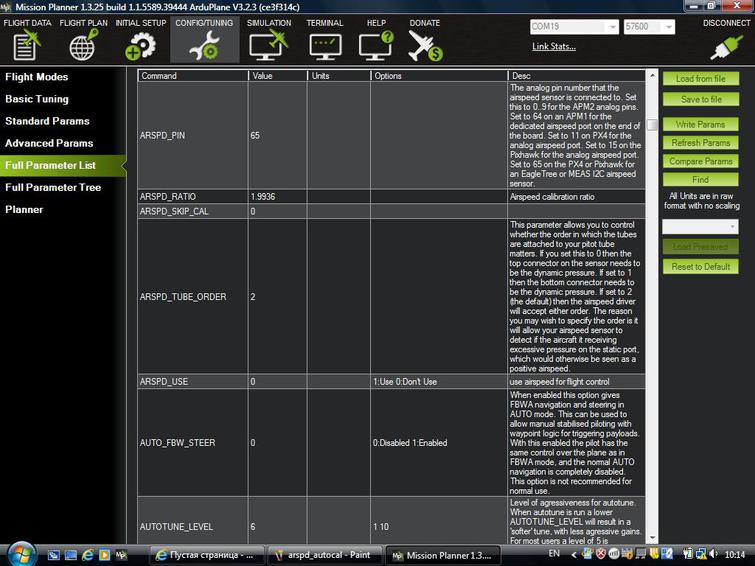
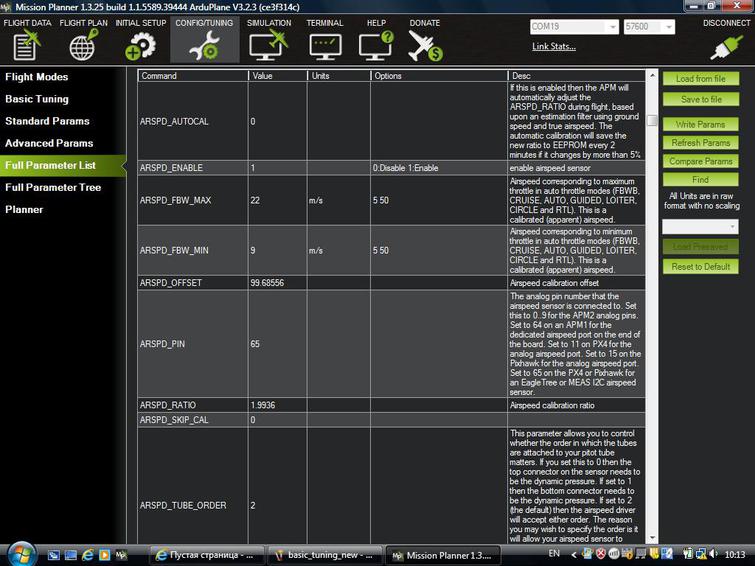
Калибровка датчика выполняется в полете, перед полетом выбираем ARSPD_AUTOCAL=1.
Проверяем значения воздушной скорости и напряжения батареи в окне HUD.

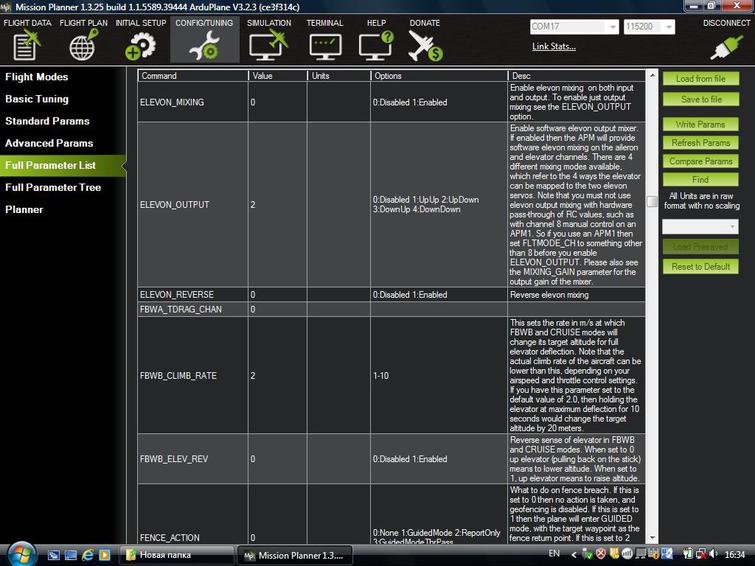
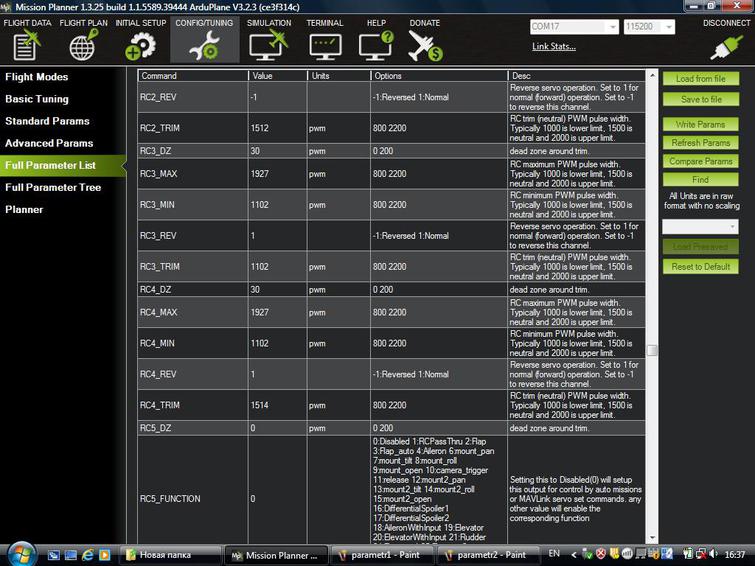
Далее настраиваем элевоны, для этого пользовался инструкцией на английском языке «New style elevon mixing EEPROM setup» (ELEVON_OUTPUT option) http://plane.ardupilot.com/wiki/arduplane-setup/first-time-apm-setup/reversing-servos-and-setting-normalelevon-mode/#new_style_elevon_mixing_eeprom_setup_elevon_output_option
В прошивку начиная с версии 2.73 была добавлена опция ELEVON_OUTPUT, которая может принимать значения от 0 до 4.
В передатчике нужно отключить микширование сигналов для работы элевонов, автопилот это будет делать самостоятельно.
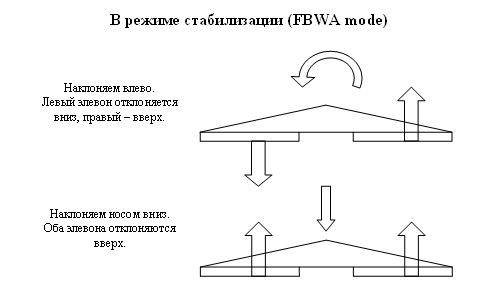
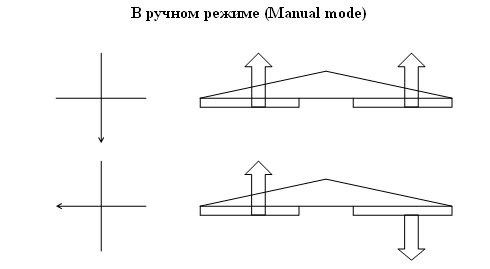
Выбираем ELEVON_OUTPUT=1 и смотрим на перемещение элевонов в режиме FBWA. Если при крене элевоны отрабатывают в одном направлении, то меняем ELEVON_OUTPUT на 2 и т.д. до 4, пока не будет нужной реакции.
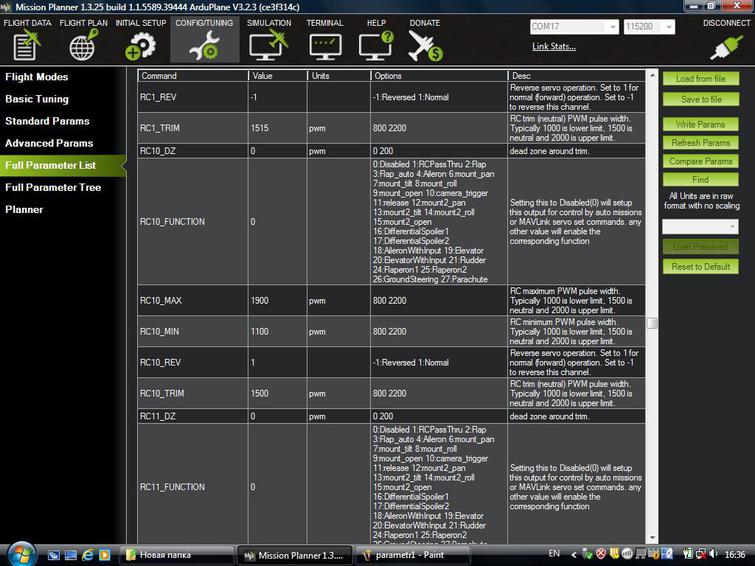
Если элевоны отклоняются не в том направлении, настраиваем реверсы RC1_REV RC2_REV
Далее настраиваем в ручном режиме реакцию рабочих поверхностей на стики пульта радиоуправления. Если отклонение элевонов происходит не в ту сторону, то настраиваем в пульте для выбранного канала реверс.
Расходы рулевых поверхностей при полном отклонении стика составили 12 мм, а при отклонении стика в обоих осях - 24 мм.
Что касается ПИДов, то в целом и с базовыми значениями поведение модели должно быть адекватным.

На официальном сайте для некоторых моделей приведены значения ПИДов, поэтому их можно использовать за отправные, а уже после первых тестов выполнить автоматическую настройку Autotune. Для этого достаточно назначить Autotune в качестве одного из полетных режимов.

Первоначально я использовал следующие Пиды:
RLL2SRV_P: 0.8
PTCH2SRV_P: 0.5
NAVL1_PERIOD: 19
Данные значения рекомендованы для данного типа летательного аппарата.
Обязательно настраиваем регулятор. Делаем калибровку газа и не забываем установить электронный тормоз, иначе воздушный винт будет авторотировать и создавать тормозящий эффект.
.1432711523642.prev.png)
С электроникой и ее настройкой разобрались и теперь летательный аппарат готов к первому запуску.
Катапульта
Запуск изначально предполагался с катапульты, поэтому заказал эластичный жгут HobbyKing® 8mm Silicon Rubber Bungee Hi-Start Cord
HobbyKing® 8mm Silicon Rubber Bungee Hi-Start Cord
Товар http://www.parkflyer.ru/product/10609/
В хозяйственном магазине купил крючок для полотенец, кольца сварные диаметром 30 мм и сантехнические трубы диаметром 32 мм.

Крючок закрепил на два болта, возможно, что я немного перестраховался, но решил что так будет надежнее.


Центр тяжести у меня находится в сантиметре от задней кромки передних выемок.
Сама катапульта выглядит следующим образом.


Четыре метровых трубы, соединяются деревянным бруском.
Передняя часть и вертикальные стойки (полуметровые трубы) закреплены на металлические уголки. В уголках завернуты не все шурупы для возможности стойкам складываться. В основание трубы вставлены колышки для надежной фиксации на поверхности земли. Задняя часть сделана из подручных материалов. Для спуска реализована классическая схема с педалью. Сборка по времени занимает не более 10 минут.


После успешных тестов решил модернизировать конструкцию катапульты -докупил дополнительные угловые и Т-образные соединители для труб. Теперь катапульта в разобранном и собранном виде выглядит следующим образом.


Первый полет
В выходные на майских праздниках впервые облетал крыло. Первоначально резиновый жгут растянул в два с половиной раза. По первым ощущениям показалось, что все таки нужно больше усилия.
Очередной запуск после модернизации катапульты, немного управление зажал экспонентами
После резиновый жгут сложил вдвойне и растянул в три раза. Таким образом усилие в момент старта возросло почти в два раза, старт получился более уверенный, без просадки при сходе с направляющих.
Так же попробовал запуск и в безмоторном режиме.

Выводы и заключения
Сейчас я взял бы крыло из белого материала. После ламинирования белый корпус выглядит наряднее. На черном корпусе цветные пленки и скотч выглядят блекло.
Катапульта удобная вещь, но требует дополнительного времени для ее сборки и установки.
При растяжении жгута с 10 до 20-25 метров усилие, судя по замерам, составило около 3,5 кг. При первом же запуске стало понятно, что недостаточно тяги на крюке в момент старта. Самолет проседает практически до самой земли. Жгут сложенный вдвойне позволил получить усилие на крюке около 7 кг. В безмоторном режиме летающее крыло сходит с катапульты практически без просадки, уверенно набирает скорость, расстояние планирования значительно увеличилось.
С настройками по умолчанию поведение модели вполне адекватное, но в дальнейшем, конечно, требуется тонкая настройка автопилота.
Центр тяжести немного сместил назад, так как в безмоторном режиме самолет немного клюет носом.
В целом всем доволен, через несколько дней наступит лето, лучшее время для полетов.
Летающее крыло из пенокартона.+7116 августа 2013 года в 14:04 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2090/
я рассказывал о постройке модели из пенокартона, а также о летных испытаниях Настройка и полетные испытания летающего крыла.+4127 августа 2013 года в 07:34 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2170/
Воодушевленный успехами при постройке и тестировании модели, решил делать летающее крыло новой конструкции
Летающее крыло для любительской фото и видео съемки.+8919 сентября 2013 года в 19:27 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2360/
.Причинами такого решения послужили следующие факторы: во-первых возникла трудность с транспортировкой и требуется разборная конструкция, во-вторых в летающем крыле не так то просто разместить всю электронику, она просто внутрь не помещается, ее приходится крепить прямо на поверхность крыла.
Но и второе летающее крыло оказалось не совсем то, что мне было нужно. Места в нем оказалось не так уж и много, как мне первоначально казалось. Тем более мне пришлось перейти на другой тип автопилота. FY31AP был заменен на AIOP, а в последствии на APM 2.5.2. Аккумуляторы были заменены на батареи большой емкости, после чего место закончилось.
Долго мучился я в раздумьях делать самолет самому или купить. Рассматривал различные варианты:
- Darkwing
Летающее крыло Darkwing для FPV, размахом 1727 мм из стеклоткани (ARF) Товар http://www.parkflyer.ru/product/393428/
- FX-79 Buffalo
FX-79 Buffalo FPV Flying Wing EPO Airplane 2000mm (PNF) Товар http://www.parkflyer.ru/product/1471714/
- Go Discover
FPV носитель HobbyKing® ™ Go Discover, EPO, 1600мм, Набор (Kit) Товар http://www.parkflyer.ru/product/1187029/
- Skywalker X7
Летающее крыло Skywalker X7 Товар http://www.parkflyer.ru/product/1202014/
- Skywalker X8
Летающее крыло Skywalker X-8 (2120 мм, EPO) Товар http://www.parkflyer.ru/product/527758/
- RVJET
Супер крыло RVJET(черный) Товар http://www.parkflyer.ru/product/1182561/
Но особенно вызвало улыбку вот это предложение
Летающее крыло Skywalker X8 2014 (полный комплект для FPV с антенным трекером) Товар http://www.parkflyer.ru/product/1491039/
Я прекрасно понимал, что закупив материалы для проекта, потрачу приблизительно половину денег, но такой же, как продается самолет, мне точно не сделать. В итоге мой выбор пал на летающее крыло Skywalker X8. По сравнению со всеми рассмотренными он мне показался наиболее вместительным и по цене приемлемым.
Предварительно скачал и изучил инструкцию, размещенную на fpvmodel.com http://www.fpvmodel.com/u/goods_data/2014-10/20141020133838-7568.doc . Так же прочитал всю ветку форума на rcdesign-е, посвященную Х8 http://forum.rcdesign.ru/f90/thread265215-105.html .
Заказ оформил с bevrc.com http://www.bevrc.com/latest-2014-version-skywalker-x8black_p742.html?pid=742 , тем более, что от туда при заказе на сумму больше 200$ доставка EMS-ом бесплатная. Для того чтобы воспользоваться данной опцией взял еще рекомендуемый двигатель http://www.bevrc.com/gs35485-kv830_p680.html .
Конфигурация предполагалась следующая:
Сервы - Hitec 82MG
Hitec HS-82MG Микро сервомашинка с металлическим редуктором 2.8kg/19g/0.12sec Товар http://www.parkflyer.ru/product/9814/
Регулятор скорости - Turnigy SuperBrain 80A
Turnigy Super Brain 80A Brushless ESC Товар http://www.parkflyer.ru/product/100103/
Мотор - GS3548 kv830 http://www.bevrc.com/gs35485-kv830_p680.html
Пропеллер складной - 12х6
Лопасти для складывающегося пропеллера Aeronaut CAM (Rudi Freudenthaler) Товар http://www.parkflyer.ru/product/190472/
Аккумуляторные батареи - Turnigy 4s 5000mAh 40С
Аккумулятор литий-полимерный Turnigy 5000мАч 4S 40C Товар http://www.parkflyer.ru/product/10307/
Автопилот APM 2.5.2
RCTimer ArduFlyer V2.5.2 Flight Controller(Top Pin Version) Товар http://www.parkflyer.ru/product/1525839/
По сути дела все комплектующие у меня имелись, кроме двигателя, который я заказал в довесок к тушке.
После пары недель ожидания получил огромную коробку, которую курьерская служба ЕМС не особо хотела доставлять. При отслеживании трека появлялись сообщения о неудачных попытках вручения, поэтому пришлось ехать получать самому.
Первое впечатление - какой же он огромный. На фотографии сложно оценить размер, но батареи 4S 5000 просто теряются в его недрах.


Приступил к склеиванию центральной части фюзеляжа.
Клеить решил на правильный клей – UHU POR. В гипермаркетах Оби в Санкт-Петербурге данный клей продавать перестали, менеджеры сказали, что спроса на него нет. Купить пару тюбиков удалось в «Хобби острове».

Для установки мотора производитель предлагает пластиковый стакан, но при перегреве мотора пластик может «поплыть».


К тому же пластиковое крепление предполагает установку мотора внутри стакана, что усложняет обслуживание силовой установки. Взвесив все за и против, я сделал фанерное основание.



Фанерку выпилил чуть больше, пену немного примял и приклеил.


После высыхания клея фюзеляж оклеил скотчем и заложил формы из гипсовой смеси. Зачем мне формы из гипса? Что бы можно было повторить, например, из стекловолокна и эпоксидной смолы. Если снимать формы, то это нужно делать в самом начале постройки, иначе после первой морковки снимать уже будет бессмысленно. Понадобится или нет, пока для себя не решил, как говорится “пусть будет”.

Основным материалом для изготовления форм послужил «Ротбанд», который остался после ремонта.

Из реек и листа ДВП сделал отбортовку. Чтобы гипс не прилипал к рабочей поверхности, оклеил ее скотчем. Отбортовку закрепил проволокой к трубам, усиливающим крылья.

Верхняя половина готова. Остается дождаться застывания раствора и снять форму.

Через пару дней снял отбортовку. Край получился идеальный.

Благодаря скотчу гипсовая смесь к корпусу практически не прилипает.



Теперь можно делать вторую половинку.




Крышку лючка сделал отдельно, получилось три гипсовых формы фюзеляжа.

Так как имелись небольшие изъяны на поверхности форм, то слегка прошелся тонкой шпатлевкой.
В то время, как шел процесс изготовления матриц, а он оказался достаточно длительным, у меня появилось время, чтобы заняться крыльями.
Сервоприводы предполагались Hitec 82MG, но выяснилось, что после предыдущего сезона осталась живой только одна серва. Нужно было покупать новую.
В итоге я взял зарекомендовавшие себя среди моделистов той же фирмы цифровые сервы 5085MG
Hitec HS-5085MG Digital Servo Товар http://www.parkflyer.ru/product/112524/
У цифровых и усилие будет побольше, что не маловажно для большой модели. В крыльях предусмотрены отверстия под стандартные сервомашинки размером 40х40 мм, но многие ставят размера мини. Покрутив в руках кусочек фанеры и сервопривод, решение пришло само собой. Основание выпилил из 3 мм фанеры, а крепление сервопривода к фанере сделал из алюминиевого уголка.
Сервомашинки легко извлекаются для технического обслуживания или замены.
Качалки решил не подрезать, а сделать выемку в креплении. В случае поломки одного плеча можно будет перевернуть и использовать дальше, тем более место позволяет.
.1432709617405.JPG)
Так как запуск предполагался с катапульты и посадка по-самолетному на пузо, то сервоприводы решил перенести на верхнюю плоскость крыла.
.1432709648832.JPG)
Можно было прорезать только отверстия под качалки, чтобы сделать тяги сверху крыла, но замеры показали, что длины качалок не хватает. Поэтому отверстия прорезал насквозь, отрезанные кубики вклеил на клей «Титан». Тут применил именно «Титан», так как он хорошо заполняет пустоты.
После примерки внутрь приклеил фанерные основания.
Далее нужно было решить, что делать с элевонами. Попробовал оставить на пене, но тугой ход и разный угол отклонения от центра к краю, я посчитал не приемлемым. Когда их отрезал, первое впечатление было, что какие же элевоны «жиденькие», нужно усиливать. Озадачившись этим вопросом, стал подбирать карбоновую планку или тонкую бальзу, но на форуме прочитал про технологию ламинирования и решил попробовать. Для этого на работе удалось найти пару листов пленки для ламинирования толщиной 150 мкм. Это был первый опыт, все получилось с первого раза, ничего сложного нет. Работал обычным утюгом, предварительно, подобрав температуру, главное не переборщить, иначе пена начинает пузыриться. После ламинирования элевоны было не узнать, они стали очень жесткими на кручение.
Перед ламинированием вклеил из тонкого гетинакса площадки под кабанчики. Кабанчики заменил на более надежные с креплением на саморезах
Набор кабанчиков 20x27мм из полиоксиметилена (10шт) Товар http://www.parkflyer.ru/product/8639/
. Элевоны навесил на обычный скотч без петель.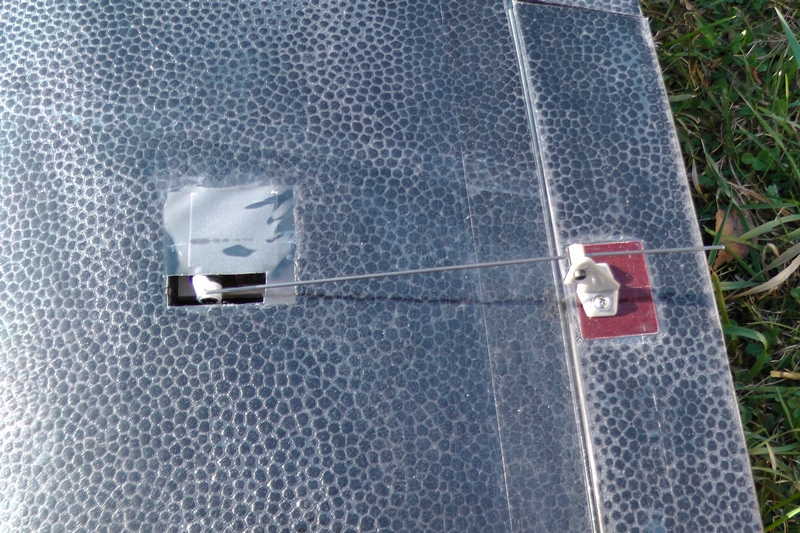

Чтобы не резать дырку в крыле вместо пластикового разъема использовал термоусадочную трубку. Так получается надежнее и компактнее.

Крепление винглетов решил переделать. Фанерки были уже приклеены, но держались не надежно и по краям практически отвалились.
Стандартно предполагается крепление винглетов саморезами. Но я в фанерки установил забивные гайки М3.



Теперь для установки винглетов использую пластиковые винты
M3X10 нейлоновый винт (10 штук ) Товар http://www.parkflyer.ru/product/114943/
, чтобы при падении срезало шляпку.Далее задумался по поводу защитного покрытия, что выбрать, скотч или пленку для ламинирования? Скотч ложится на черную пену не очень, смотрится только черный скотч. Пупырышки на поверхности проявлялись под скотчем, поэтому придется шкурить. Опыт ламинирования элевонов уже был, поэтому склонялся больше к пленке. Оставалось найти материал. Первоначально хотел купить пленку в рулоне, но нужного размера и толщины по цене меня не устраивала.
После долгих поисков нашел пленку для ламинирования формата А2 толщиной 75 мкм по очень интересной цене http://www.ancom-ink.ru/index.php?productID=16029. Вес одного пакета, состоящего из двух листов, составил 40 грамм. На весь самолет ушло 7 пакетов, причем было достаточно много обрезков, поэтому в общем к весу добавилось около 200 грамм.
Следует отметить преимущества пленки перед скотчем - это прочность и отсутствие многочисленных стыков.
Поверхности у Х8 не сложные и легко покрываются целыми листами. На фотографии видно, что для ламинирования крыла достаточно двух пакетов. Один лист вдоль, а другой поперек покрывают поверхность крыла полностью.


После ламинирования всех поверхностей, приклеил оранжевые пластиковые соединители крыльев. Уже приклеив, обнаружил, что отверстия под серво разъемы на крыльях расположены вдоль, а на фюзеляже – поперек. Дрель и напильник устранили данный недостаток.

Стандартное крепление лючка на шурупах мне не понравилось, пришлось заказать такие замочки
Прочный замок для фонаря кабины (2шт.) Товар http://www.parkflyer.ru/product/996508/
. На внутреннюю переднюю поверхность крышки люка приклеил фиксатор из фанеры и замок сзади.
Установка электроники
Вместо запланированного автопилота APM 2.5.2 в летающее крыло был установлен Pixhawk, а точнее его клон от RCTimer, который называется Fixhawk
Rctimer Fixhawk/Pixhawk 32bit Flight Controller Товар http://www.parkflyer.ru/product/1469287/
.
Контроллер установил на виброизоляционную платформу
APM Flight Controller Damping Platform Товар http://www.parkflyer.ru/product/1644050/
Данную платформу уже использую на своих моделях, со своей задачей она отлично справляется.
Датчик тока из того же комплекта с RCTimer, он способен работать от батарей до 7S.
GPS-модуль самый обычный Neo-6M без компаса. Для самолета это не очень критично, тем более компас есть в полетном контроллере.
К автопилоту подключил приемник Futaba R6202SBW через порт SBUS одним проводом.
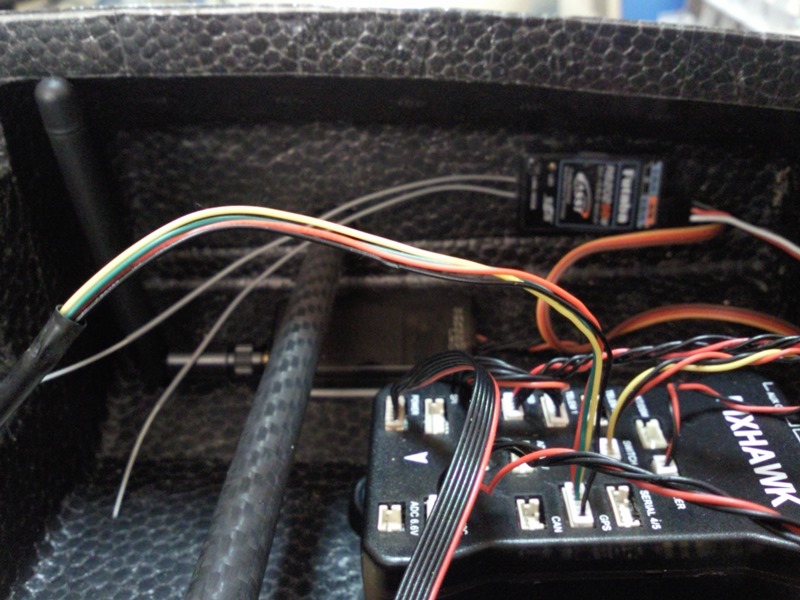
Радиомодемы второй версии на 900МГц HKPilot Transceiver Telemetry Radio Set V2 (915Mhz)
HKPilot Transceiver Telemetry Radio Set V2 (915Mhz) Товар http://www.parkflyer.ru/product/1458492/
Датчик скорости установил цифровой
HKPilot 32 Digital Air Speed Sensor And Pitot Tube Set Товар http://www.parkflyer.ru/product/1481051/
но пока еще трубки не вывел. Причина очень простая, если при первом полете возникнет нештатная ситуация, чтобы не сломать. Тем более в ручном режиме и стабилизации он не используется, а первые тесты будут именно в этих полетных режимах.
Регулятор скорости установил Turnigy SuperBrain 80A
Turnigy Super Brain 80A Brushless ESC Товар http://www.parkflyer.ru/product/100103/
Данный регулятор побывал уже на многих моих моделях и пережил несколько моторов, которые сгорели после падений по различным причинам и были самостоятельно восстановлены Перемотка бесколлекторного мотора – это легко.+20419 октября 2013 года в 13:18 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2647/
.
Сделал ограничители для отклонения лопастей складного пропеллера.
Зачем они нужны? При отклонении лопастей в сторону фюзеляжа винт может задевать за корпус. При полете с выключенным мотором пропеллер складывается и возможен перехлест лопастей.




В собранном виде пропеллер выглядит следующим образом.


На фотографии приведены максимальные углы отклонения лопастей складного пропеллера после установки ограничителей.
Настройка электроники
Прошивку загрузил с помощью MissionPlanner. Актуальная версия прошивки на момент написания статьи была ArduPlane 3.2.3. Сейчас вышла новая версия 3.3.0. Разработчики пишут о многочисленный изменениях, надо будет попробовать
Сервоприводы и регулятор скорости подключил согласно приведенной на официальном сайте схемы.

Что касается настроек, все настраивается практически, так же как и для коптера.
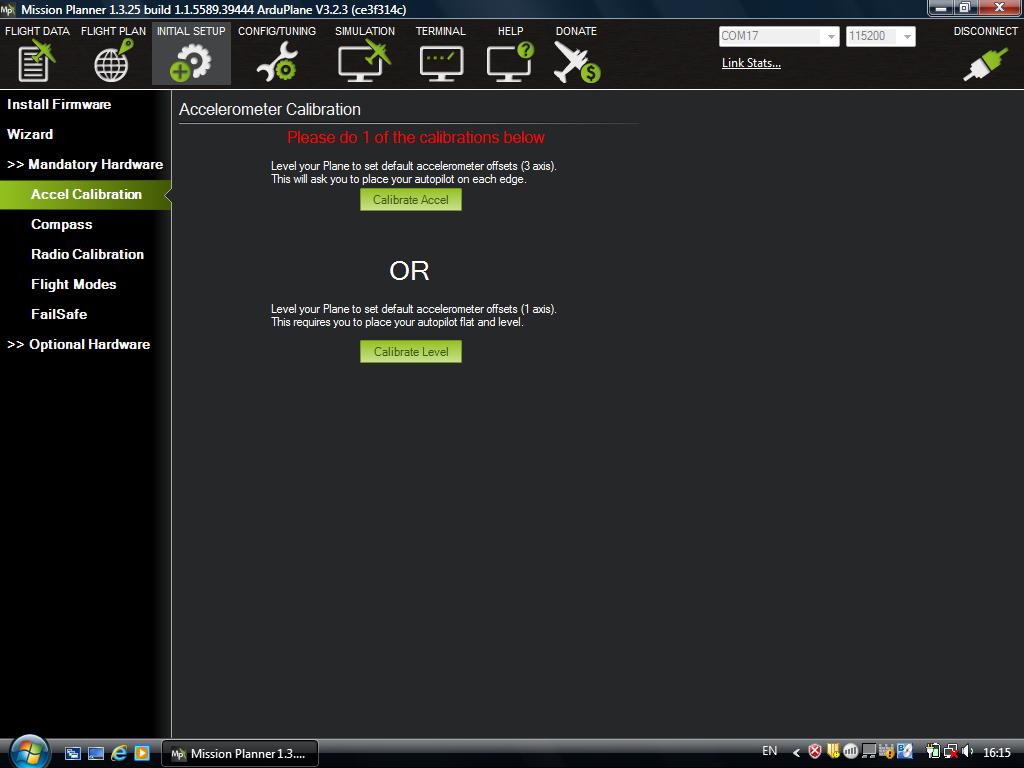
Первым делом выполняем основные настройки. Калибровка акселерометра может быть выполнена в одной плоскости или во всех. Самолет в собранном состоянии особо не покрутишь, поэтому можно откалибровать первым способом. Но в прошивке 3.3.0 убрали калибровку в одной плоскости.
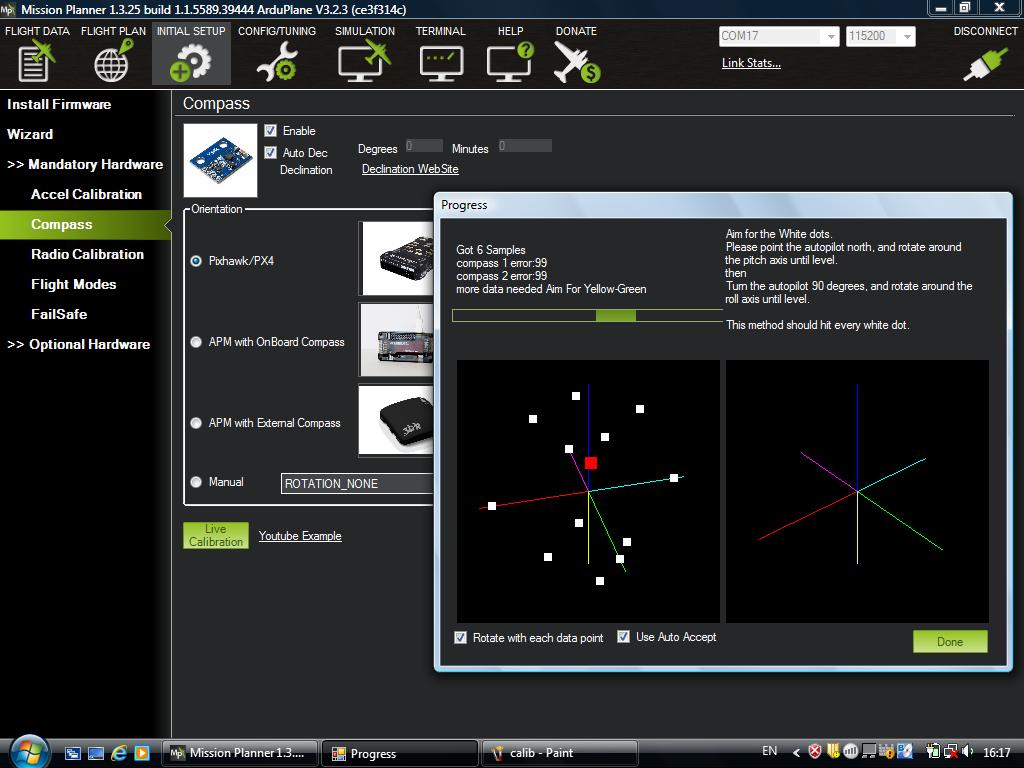
Калибровка компаса. Крутим-вертим самолет, пока не окрасится шар. При наличии внешнего компаса окрашиваться будет два шара.
Калибровка радиоуправления. Двигаем стики и переключатели для всех каналов. Проверяем, чтобы сигнал не выходил за пределы 1000-2000 мс.

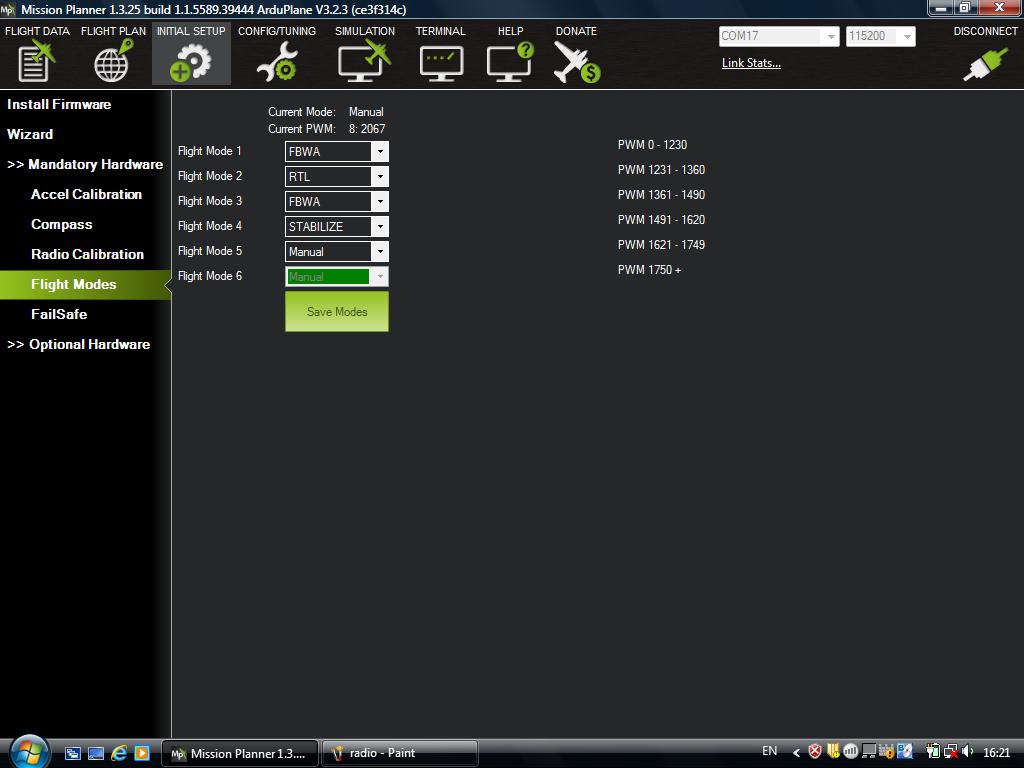
Полетные режимы в самолетной прошивке заведены на восьмой канал. Я выбрал для положения тумблера равным 0 ручной режим (manual), 1-режим стабилизации (stabilize), 2- FBWA.
Также настроил дополнительное оборудование, которое подключено к автопилоту.
Радиомодемы не забываем настраивать. Первым делом, обязательно меняем номер канала NetID, чтобы снизить вероятность несанкционированного подключения. На данном ресурсе неоднократно упоминалось об угоне моделей, поэтому не стоит оставлять лазейку для злоумышленников. Не оставляйте значения, которые были записаны по умолчанию. Проверяем выходную мощность TX Power. Многие жалуются на дальность связи радиомодемов, для работы в режиме максимальной мощности должно быть выбрано значение равное 20, оно соответствует 100мВт.

Датчик тока выбрал соответствующий в интерактивном меню, калибровку не выполнял, так как с заданными значениями отображаются адекватные данные о силовой батарее.
В соответствующей вкладке выбрал цифровой датчик воздушной скорости.
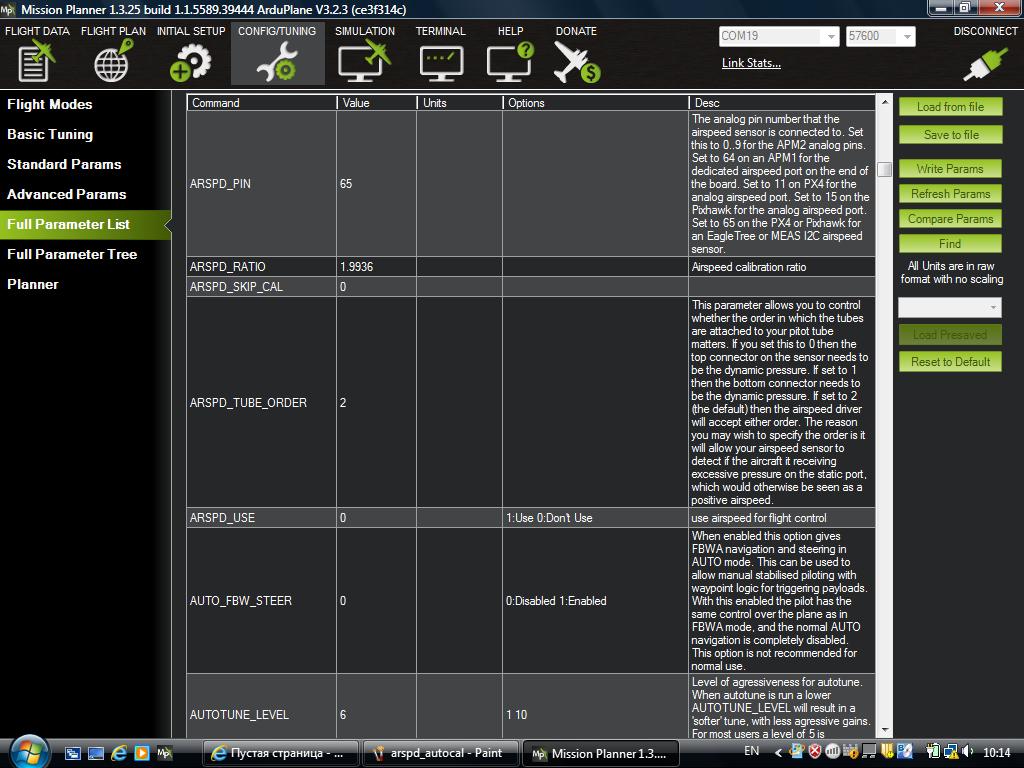
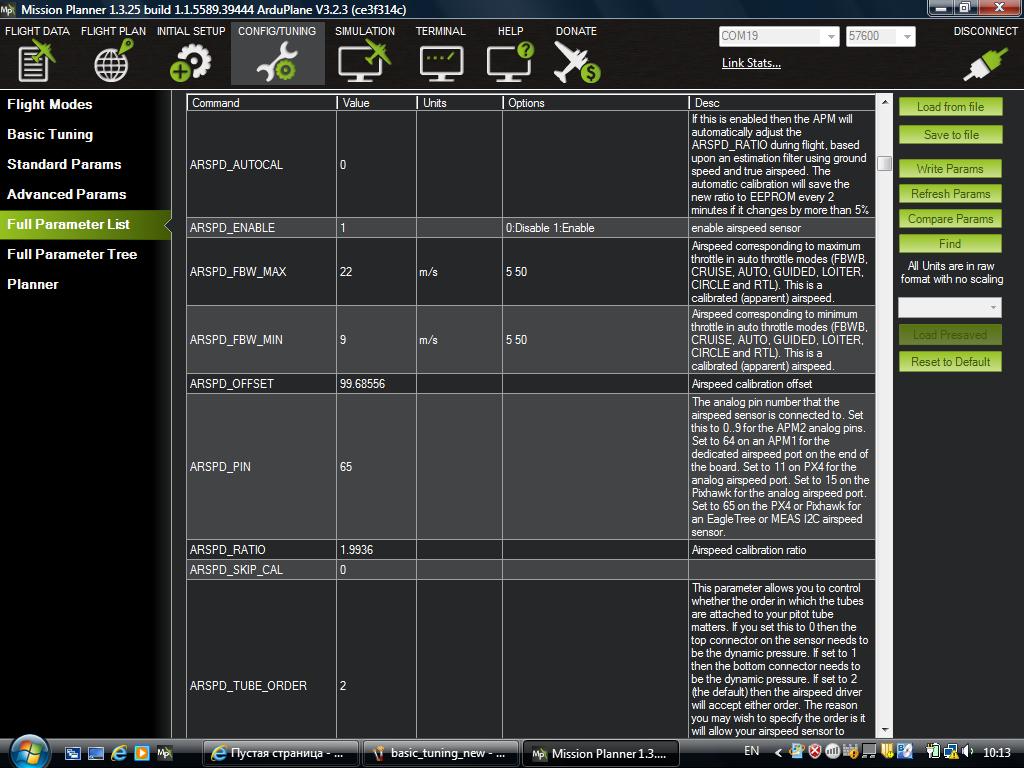
Калибровка датчика выполняется в полете, перед полетом выбираем ARSPD_AUTOCAL=1.
Проверяем значения воздушной скорости и напряжения батареи в окне HUD.

Далее настраиваем элевоны, для этого пользовался инструкцией на английском языке «New style elevon mixing EEPROM setup» (ELEVON_OUTPUT option) http://plane.ardupilot.com/wiki/arduplane-setup/first-time-apm-setup/reversing-servos-and-setting-normalelevon-mode/#new_style_elevon_mixing_eeprom_setup_elevon_output_option
В прошивку начиная с версии 2.73 была добавлена опция ELEVON_OUTPUT, которая может принимать значения от 0 до 4.
В передатчике нужно отключить микширование сигналов для работы элевонов, автопилот это будет делать самостоятельно.

Выбираем ELEVON_OUTPUT=1 и смотрим на перемещение элевонов в режиме FBWA. Если при крене элевоны отрабатывают в одном направлении, то меняем ELEVON_OUTPUT на 2 и т.д. до 4, пока не будет нужной реакции.

Если элевоны отклоняются не в том направлении, настраиваем реверсы RC1_REV RC2_REV
Далее настраиваем в ручном режиме реакцию рабочих поверхностей на стики пульта радиоуправления. Если отклонение элевонов происходит не в ту сторону, то настраиваем в пульте для выбранного канала реверс.
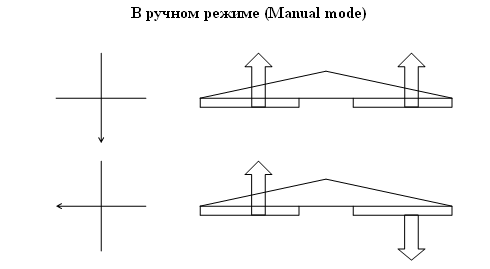
Расходы рулевых поверхностей при полном отклонении стика составили 12 мм, а при отклонении стика в обоих осях - 24 мм.
Что касается ПИДов, то в целом и с базовыми значениями поведение модели должно быть адекватным.

На официальном сайте для некоторых моделей приведены значения ПИДов, поэтому их можно использовать за отправные, а уже после первых тестов выполнить автоматическую настройку Autotune. Для этого достаточно назначить Autotune в качестве одного из полетных режимов.

Первоначально я использовал следующие Пиды:
RLL2SRV_P: 0.8
PTCH2SRV_P: 0.5
NAVL1_PERIOD: 19
Данные значения рекомендованы для данного типа летательного аппарата.
Обязательно настраиваем регулятор. Делаем калибровку газа и не забываем установить электронный тормоз, иначе воздушный винт будет авторотировать и создавать тормозящий эффект.
.1432711523642.png)
С электроникой и ее настройкой разобрались и теперь летательный аппарат готов к первому запуску.
Катапульта
Запуск изначально предполагался с катапульты, поэтому заказал эластичный жгут
HobbyKing® 8mm Silicon Rubber Bungee Hi-Start Cord Товар http://www.parkflyer.ru/product/10609/
В хозяйственном магазине купил крючок для полотенец, кольца сварные диаметром 30 мм и сантехнические трубы диаметром 32 мм.
Крючок закрепил на два болта, возможно, что я немного перестраховался, но решил что так будет надежнее.


Центр тяжести у меня находится в сантиметре от задней кромки передних выемок.
Сама катапульта выглядит следующим образом.


Четыре метровых трубы, соединяются деревянным бруском.
Передняя часть и вертикальные стойки (полуметровые трубы) закреплены на металлические уголки. В уголках завернуты не все шурупы для возможности стойкам складываться. В основание трубы вставлены колышки для надежной фиксации на поверхности земли. Задняя часть сделана из подручных материалов. Для спуска реализована классическая схема с педалью. Сборка по времени занимает не более 10 минут.


После успешных тестов решил модернизировать конструкцию катапульты -докупил дополнительные угловые и Т-образные соединители для труб. Теперь катапульта в разобранном и собранном виде выглядит следующим образом.


Первый полет
В выходные на майских праздниках впервые облетал крыло. Первоначально резиновый жгут растянул в два с половиной раза. По первым ощущениям показалось, что все таки нужно больше усилия.
Очередной запуск после модернизации катапульты, немного управление зажал экспонентами
После резиновый жгут сложил вдвойне и растянул в три раза. Таким образом усилие в момент старта возросло почти в два раза, старт получился более уверенный, без просадки при сходе с направляющих.
Так же попробовал запуск и в безмоторном режиме.

Выводы и заключения
Сейчас я взял бы крыло из белого материала. После ламинирования белый корпус выглядит наряднее. На черном корпусе цветные пленки и скотч выглядят блекло.
Катапульта удобная вещь, но требует дополнительного времени для ее сборки и установки.
При растяжении жгута с 10 до 20-25 метров усилие, судя по замерам, составило около 3,5 кг. При первом же запуске стало понятно, что недостаточно тяги на крюке в момент старта. Самолет проседает практически до самой земли. Жгут сложенный вдвойне позволил получить усилие на крюке около 7 кг. В безмоторном режиме летающее крыло сходит с катапульты практически без просадки, уверенно набирает скорость, расстояние планирования значительно увеличилось.
С настройками по умолчанию поведение модели вполне адекватное, но в дальнейшем, конечно, требуется тонкая настройка автопилота.
Центр тяжести немного сместил назад, так как в безмоторном режиме самолет немного клюет носом.
В целом всем доволен, через несколько дней наступит лето, лучшее время для полетов.













П.С. Статья шикарная! А по части настройки АПМ на самолёте, вообще самая информативная из всех что мне попадались в рунете!
1 вы неуказали название шуруповерта)))))))
ну и 2, на мой взгляд самое главное-неуказано название утюга которым обтягивали.)))))))
и конечно же забыли указать где вы их купили.(шурик и утюг). )))))))))
P.S. и серьезно,читал с удовольствием.желаю вам побольше таких статей написать.а особенно ооочень хочется прочитать как делался углепластиковый(стеклопластиковый) вариант. понимаю что не скоро ноооо.
Почему я это спрашиваю:
Когда ЛК летит горизонтально, то но летит со слегка приподнятым носом, по крайней мере так летают всякие Кеслы и прочие ФПВ-49. Соот-но, если плату разместить строго горизонтально то она будет заставлять аппарат лететь строго горизонтально, а оно так не будет лететь, потому что подъемная сила не создается с нулевым углом атаки.
Мне помогло в этой ситуации слегка приподнять задний край платы АПМ, чтобы автопилот "думал", что ЛК слегка наклонено вниз носом и пытался этот нос приподнять. Ну и соот-но элевоны слегка вверх поднять. Вот тогда полетел ровно в режиме STAB.
Видимо он создает подъемную силу даже при нулевом угле атаки.
А у меня был симметричный профиль.
Видимо секрет в этом.
Для возврата домой? Или для облегчения пилотирования?
А еще я так и не добился ровной картинки на ЛК, только классика летит достаточно ровно чтобы видео было приятно смотреть. Летающему крылу сильно не хватает стабилизатора.
На всех видео на ютубе снятых с Х8 всегда присутствует болтанка по тангажу, иногда мелкая и раздражающая, иногда сильная и еще сильнее раздражающая.
Разве что подвес намострить.
нет опасности попасть под винт рукой,
уверенный старт, всегда успешный, ровный и одинаковый,
экономия силовых батарей на старте,
быстро устанавливается, всего за 10 минут,
компактная, полностью разборная, с транспортровкой сложностей нет.
Подвес есть, но пока не ставил.