Всем Привет !
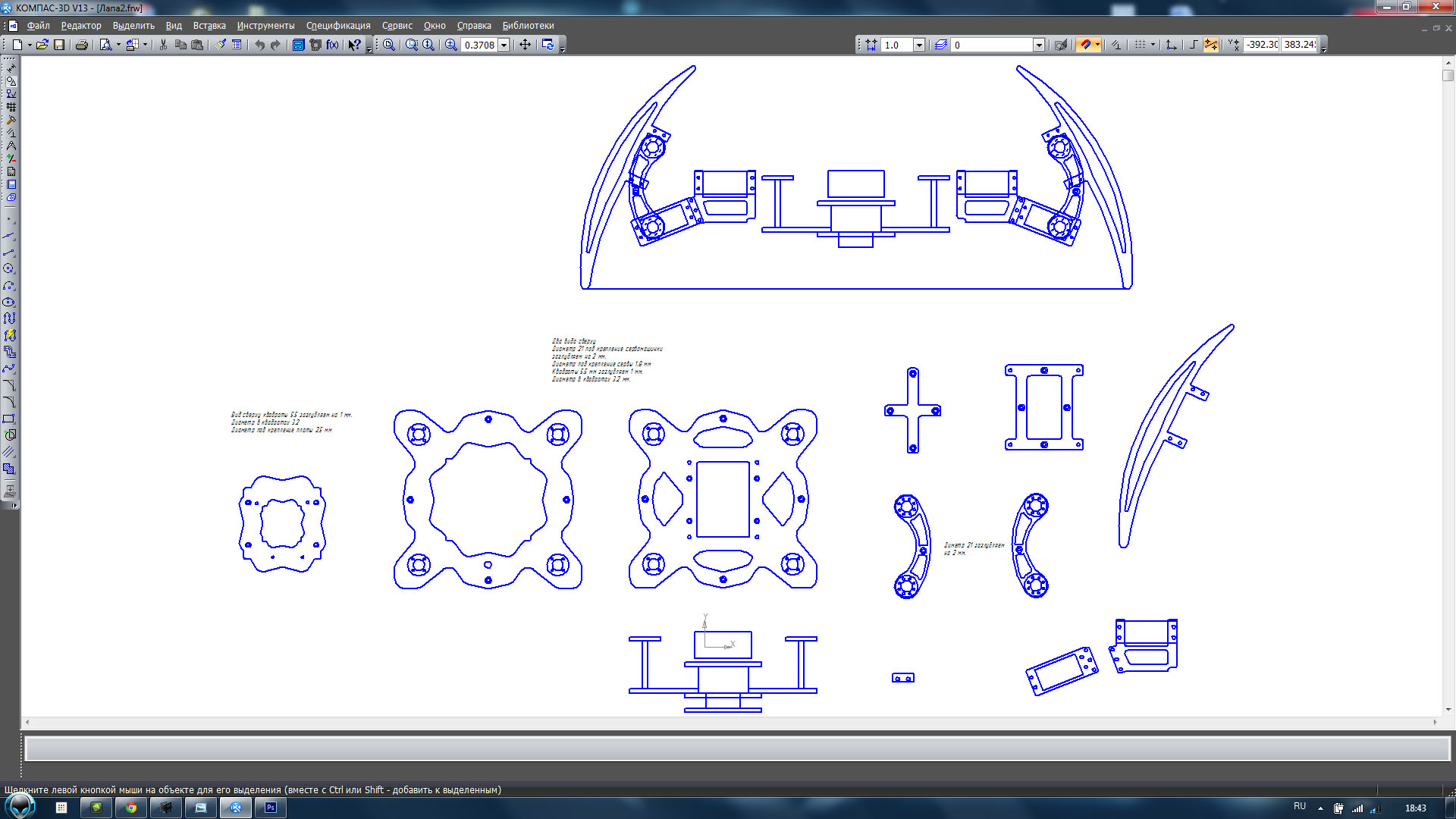
Год назад заинтересовался микроконтроллерами "arduino" и постройкой четырехногово робота-паука на Arduino Uno R3. Интерес возник после чтения различных статей, просмотра видео на портале youtube. Больше всего впечатлили роботы "PhantomX hexapod" и муравей "A-pod", которые переработал парень под ником Zenta (Коре Халворсен) . Первый его робот создан на сервомашинках "dynamixel AX-18" от компании "Robotis", а второй на сервомашинках "Hitec". Эти сервомашинки одни из дорогих. Создавать пробную модель, которую запланировал на базе этих машинок, мне будет не по силам. В качестве сервомашинок выбор пал на "Tunigy TGY-S9010" (13 кг.), заказал шилд dfrobot i/o expansio v 5.0, в дальнейшем будет установлен модуль bluetooth xbee, батарея 7,4v 5100mah, и SBEC на 20A сила тока при ходьбе будет скорее всего превышать 12А, поэтому заказал с запасом. После просмотра множества картинок и фото, я решил создать робота по своему дизайну. Сделал эскизы. Эти рисунки перенес в чертежи, делал в компасе, что то в солидворксе.
Год назад заинтересовался микроконтроллерами "arduino" и постройкой четырехногово робота-паука на Arduino Uno R3. Интерес возник после чтения различных статей, просмотра видео на портале youtube. Больше всего впечатлили роботы "PhantomX hexapod" и муравей "A-pod", которые переработал парень под ником Zenta (Коре Халворсен) . Первый его робот создан на сервомашинках "dynamixel AX-18" от компании "Robotis", а второй на сервомашинках "Hitec". Эти сервомашинки одни из дорогих. Создавать пробную модель, которую запланировал на базе этих машинок, мне будет не по силам. В качестве сервомашинок выбор пал на "Tunigy TGY-S9010" (13 кг.), заказал шилд dfrobot i/o expansio v 5.0, в дальнейшем будет установлен модуль bluetooth xbee, батарея 7,4v 5100mah, и SBEC на 20A сила тока при ходьбе будет скорее всего превышать 12А, поэтому заказал с запасом. После просмотра множества картинок и фото, я решил создать робота по своему дизайну. Сделал эскизы. Эти рисунки перенес в чертежи, делал в компасе, что то в солидворксе.
Чертежи -