
Дорогие друзья, моделисты, коллеги.
Представляем Вам результат двухмесячного труда двух учащихся робототехнического кружка станции юных техников города-курорта Анапа.
В кратце о нас... Наша команда называется OmniKid (что в переводе означает всесторонне развитый ребёнок). Мы являемся призёрами соревнований по робототехнике в Краснодаре и Сочи (номинация Hello, Robot! траектория и биатлон роботов). После победы на соревнованиях регионального масштаба нам была предоставлена возможность заявить о себе на Всероссийском молодёжном робототехническом фестивале "Робофест-2015", который пройдёт в Москве 13 февраля 2015 года,
и в этот раз мы будем участвовать в категории Фристайл - исследовательские роботы.
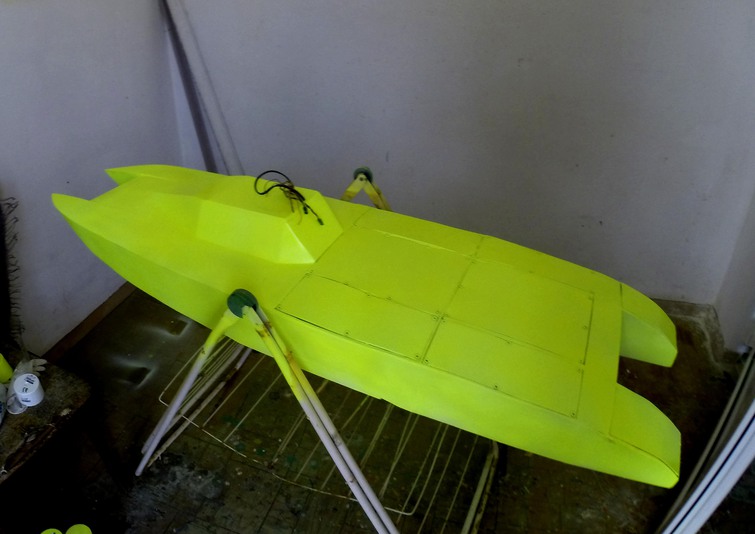
Перед Вами автономный беспилотный многоцелевой катер охраны водного районоа Государственного природного заповеднника Утриш.
Основной задачей данного робота является видеомониторинг береговой черты и водного района охраняемого периметра.
Второстепенной - забор морской воды для лабораторного анализа;
- отслеживание мигрирующих редких видов птиц ;
- выявление нарушителей.
Данный робот оснащён гиростабилизированной камерой с технологией FPV; контроллером, позволяющим катеру работать в автономном режиме, а так же двумя мощными электрическими моторами.
Предлагаю рассмотреть данное устройство более подробно от постройки до испытаний.
Идея создания появилась у мальчишек после посещения экскурсии в заповеднике. Они заметили, что на охрану заказника тратится достаточно много сил и средств. По берегу ходят казачьи патрули, на воде патрулируют маломерные суда с двигателем внутреннего сгорания (не экологично получается) и экипажем на борту, по этому было принято решение о разработке и воплощении в жизнь чего-то менее затратного и не менее эффективного.
И так приступим:
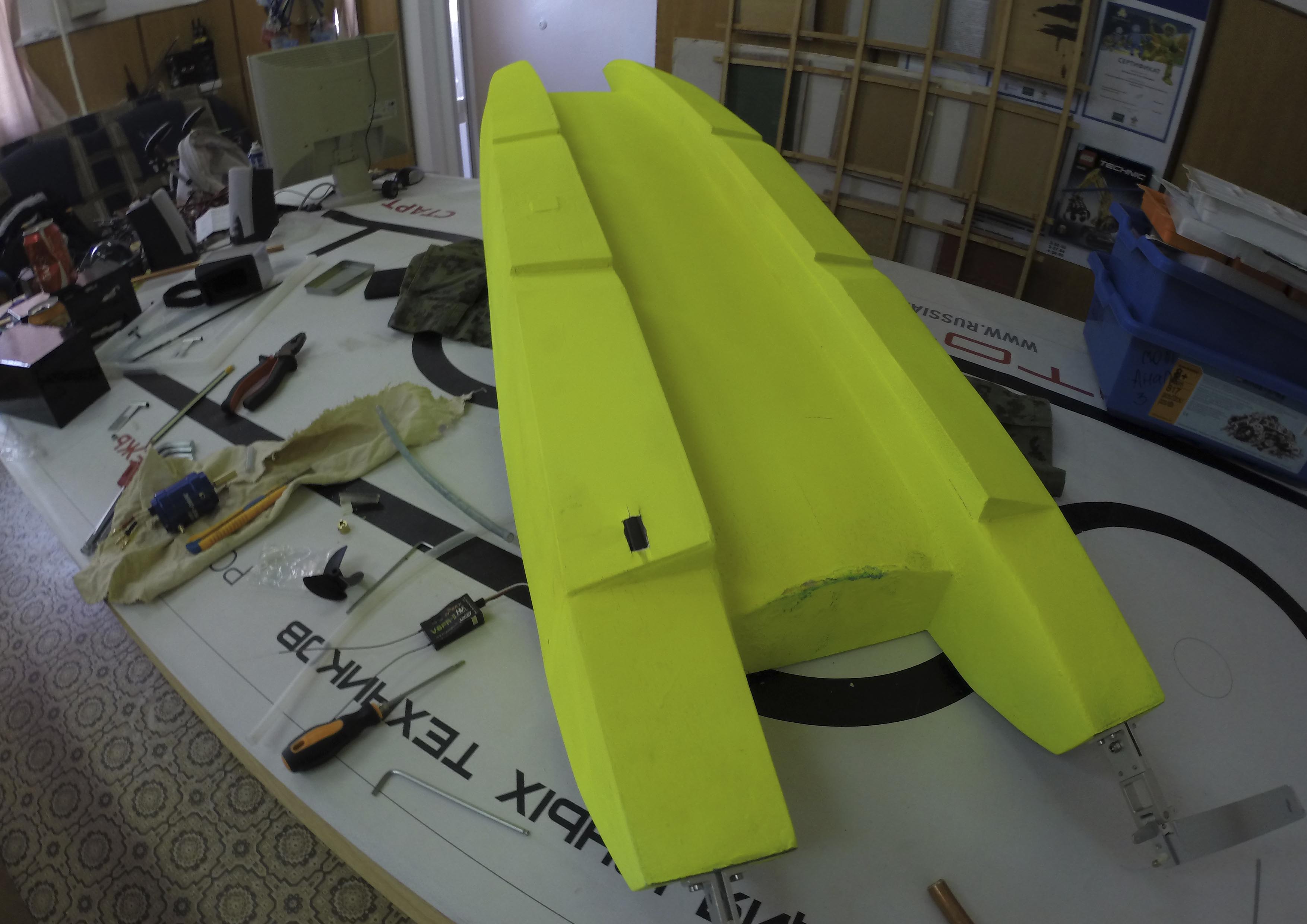
У меня в гараже лежал катер катамаранного типа Mystic c5000 собственной постройки (тогда, когда я его строил, ещё не знал, что можно делиться своим опытом с товарищами на ПаркФлаере), так вот, решили за основу взять его:


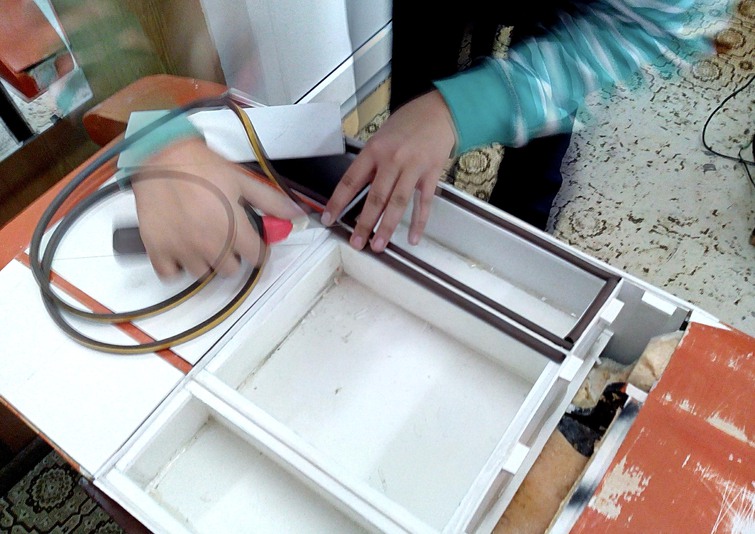
Сначала сняли остатки электроники, выломали не нужные и хлипкие части корпуса. Преимущественно корпус построен из ПВХ 3мм, с бальзовыми вставками по борту:

Ободрали наклейки и старую краску:


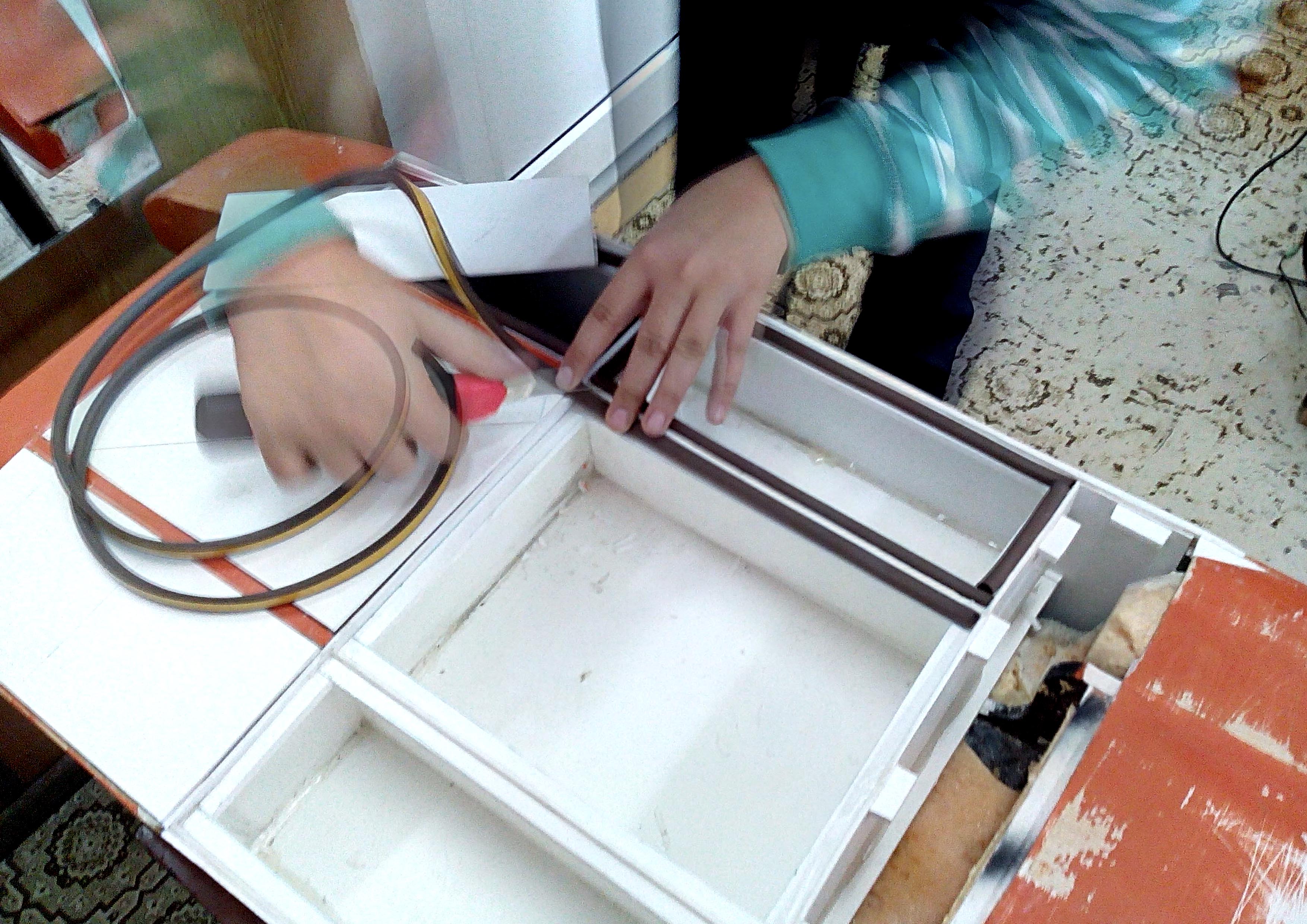
Начали изготовление герметичных отсеков:

Установили электрическую помпу (в правую лыжу) для принудительного охлаждения регуляторов и заклеели входное отверстие двустороннем скотчем на время постройки и покраски (при незначительном переоборудовании эта помпа может накачать воду в резервуар для лабораторного анализа):


Так же добавили по контуру отсеков специальные полосочки из ПВХ на которые наклеели уплотнитель для окон (в дальнейшем это нам поможет для герметизации отсеков):
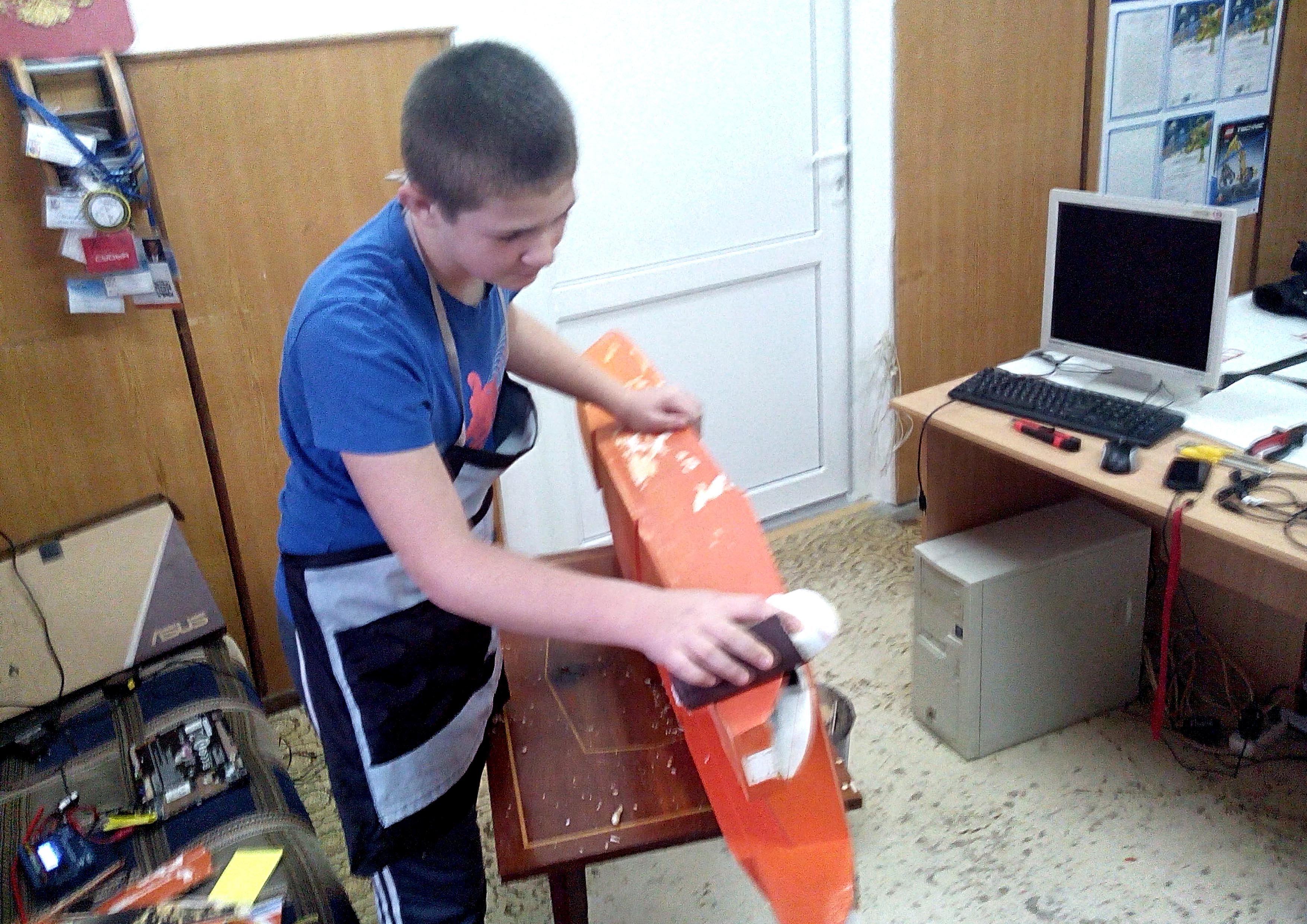
Практически подготовили корпус к шпаклеванию:


Начали шпаклевать и зачищать (применяли обычную автомобильную шпаклёвку):

Нам было необходимо установить нашу камеру на какой-то надстройке, но и с этой задачей мальчишки справились.
Из ПВХ толщиной 3 и 4 мм изготовили надстройку и протянули провода (на фото выше).
И, при покраске сразу допустили ошибку. Начали наносить краску предварительно НЕ загрунтовав поверхность.
Вот что получилось:

Потом всё-таки поняли, что делаем что-то не то и решили спросить как правильно. Нам ответили, что грунтовать нужно обязательно.
Загрунтовали и приступили к покраске:
Первые слои краски:

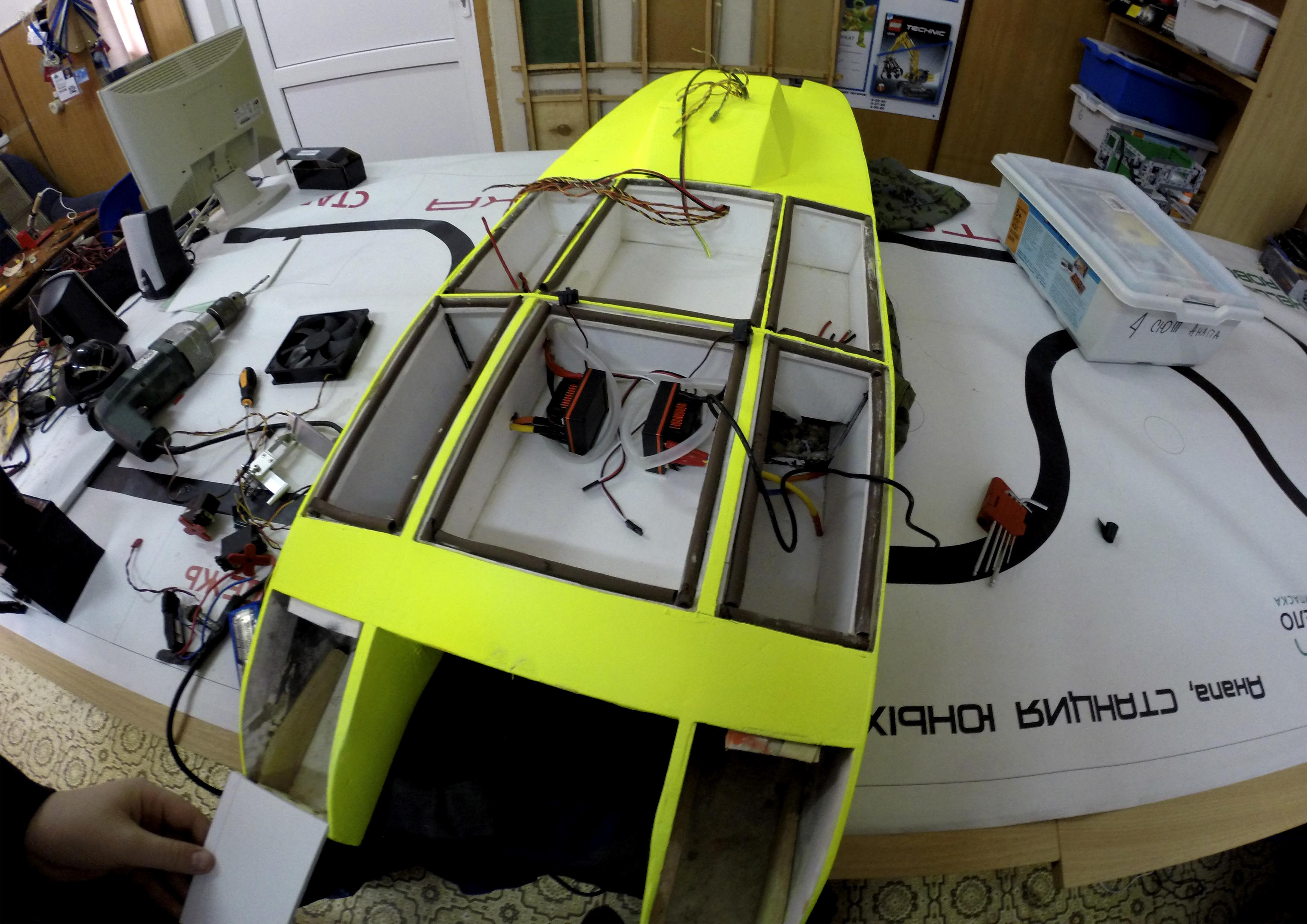
Настал долгожданный момент уставки оборудования.
Решили начать с регуляторов хода и трубки принудительного охлаждения:
Затем появилась необходимость создать (срочно) презентационную обложку (вы её видели в самом начале).
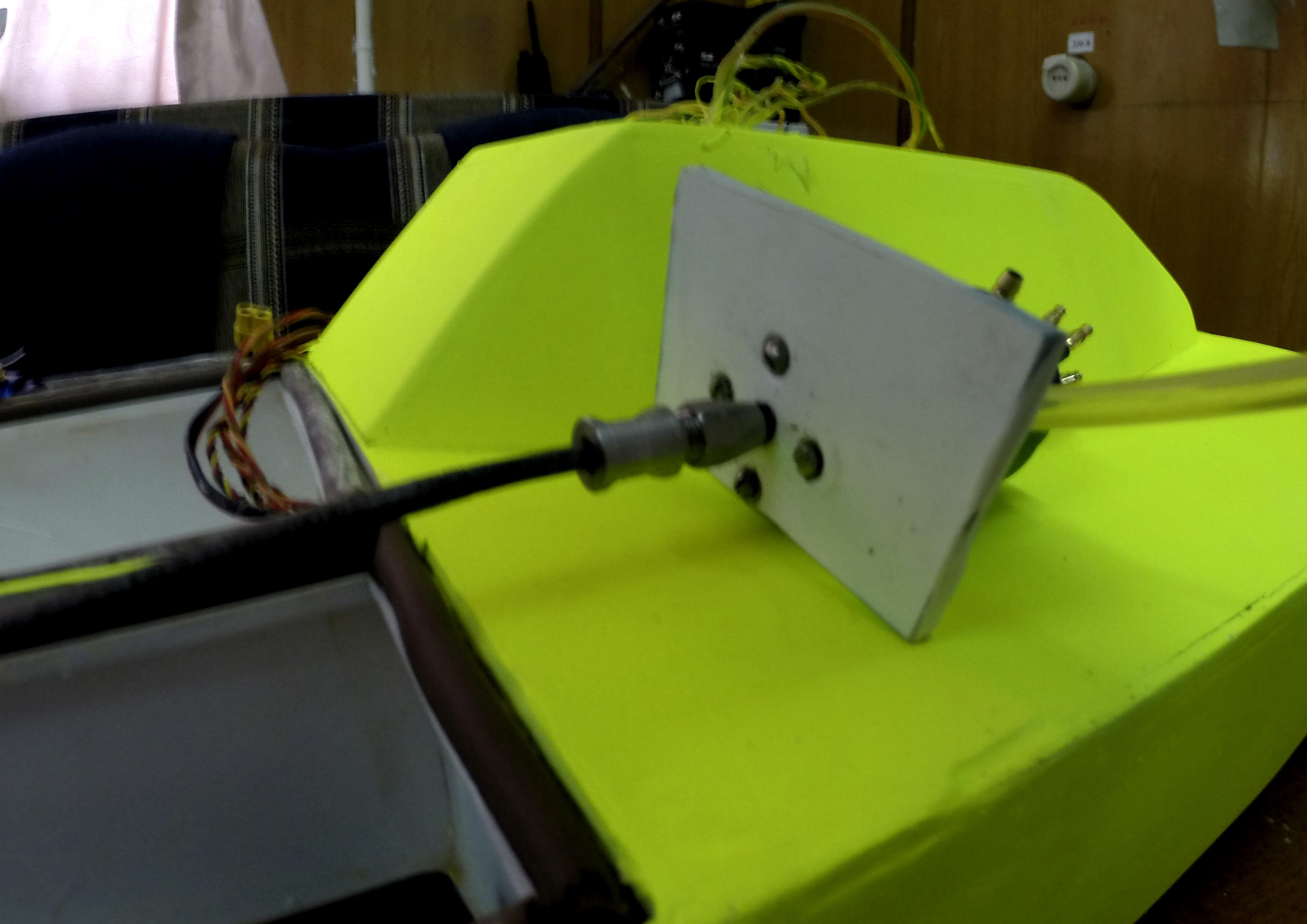
За одно и примерили изготовленный модуль видеопередачи:

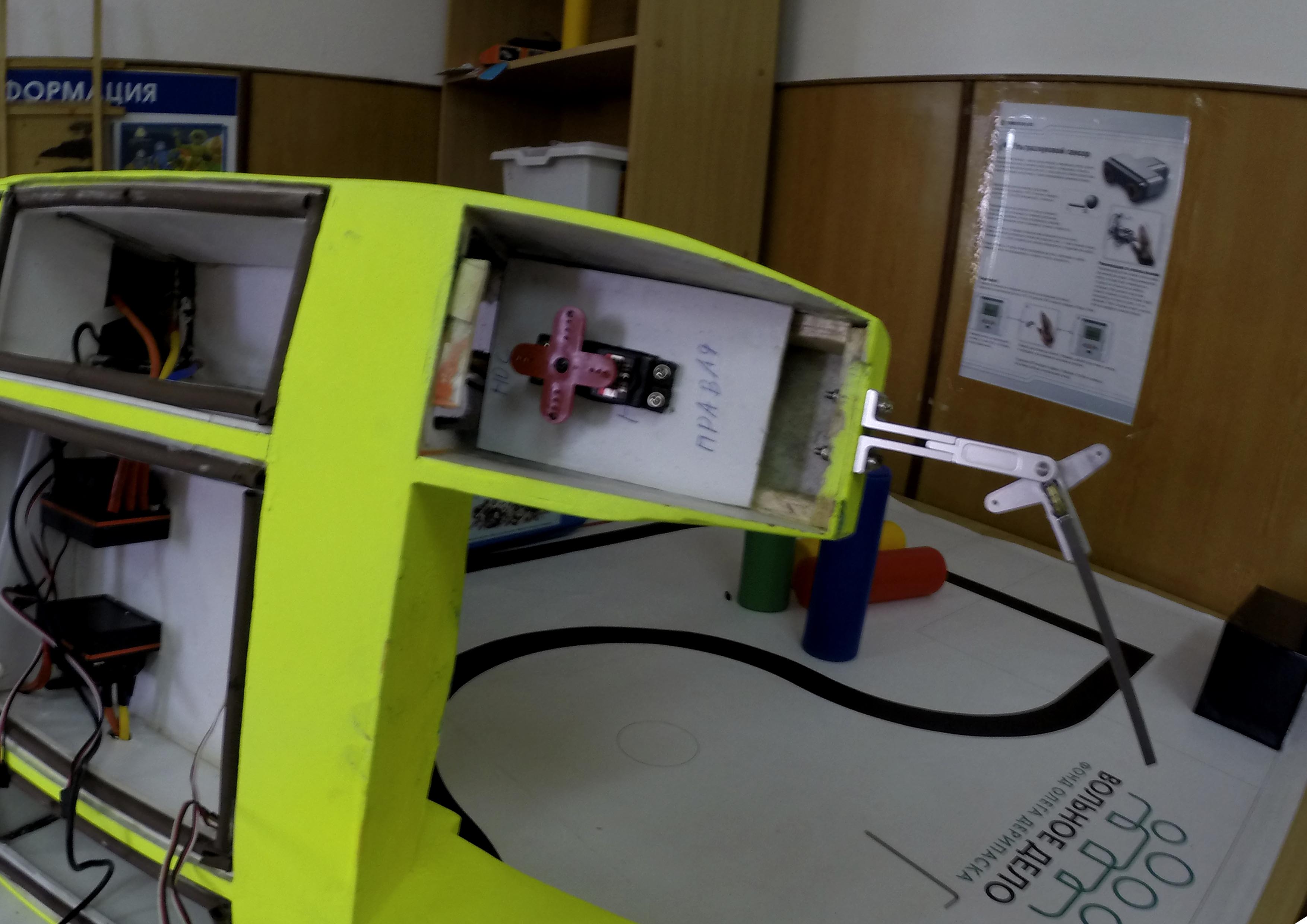
Продолжили работу над проектом установкой сервоприводов и рулей направления.
Установили площадки для серв, укрепили площадки установки рулей:
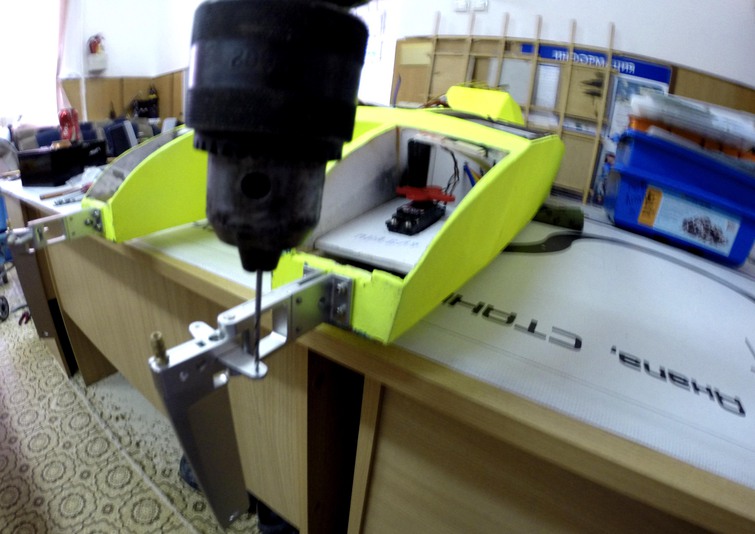
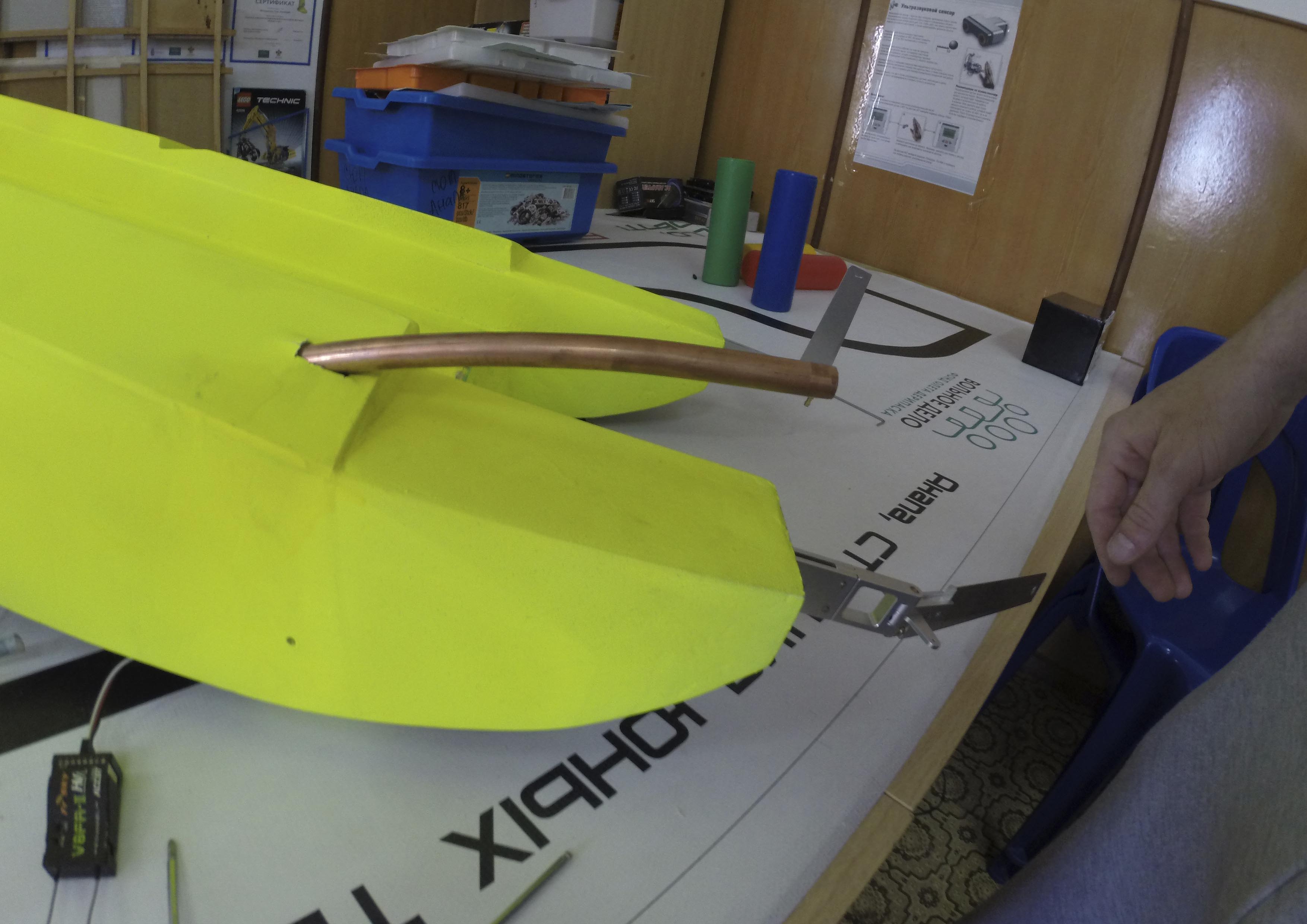
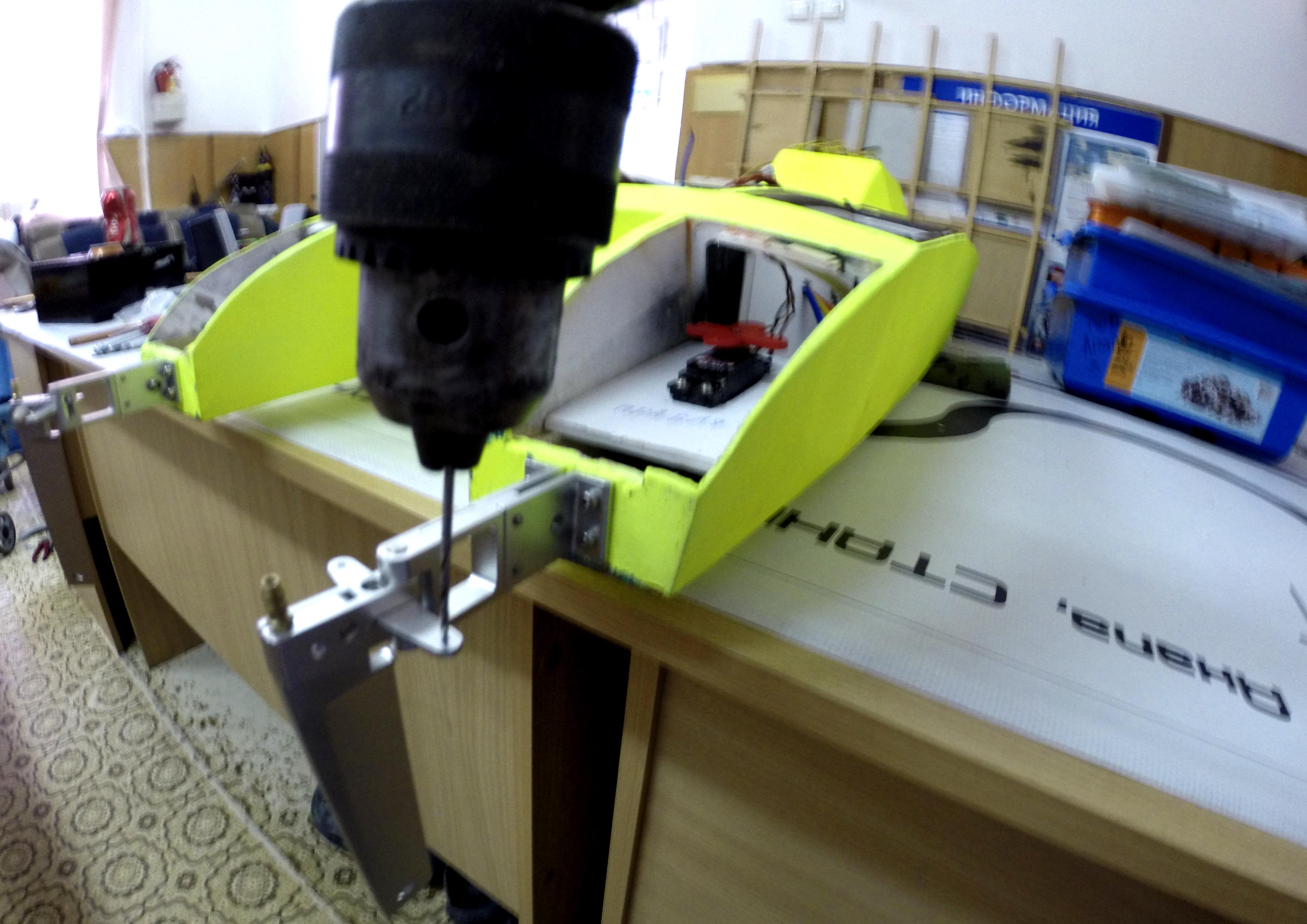
Начали установку валолиний. Проделали прямоугольной отверствие в днище моторного отсека и установили медную трубку.

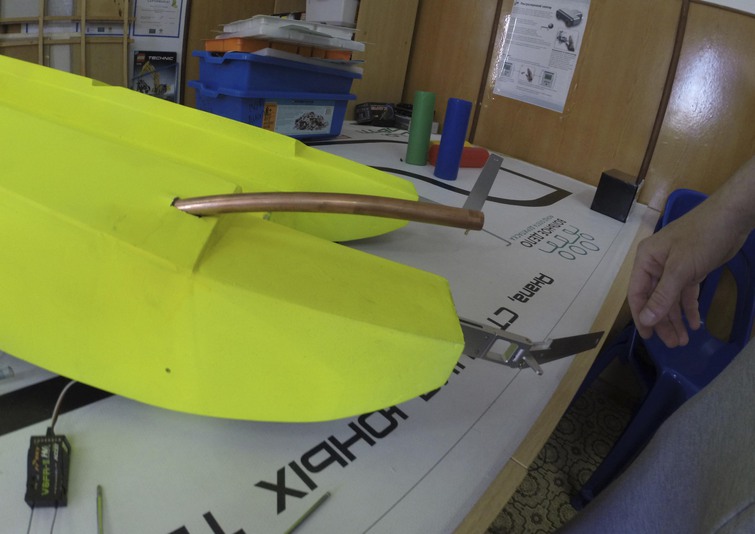
При установке стальных тяг с металлическими наконечниками возникла проблема: диаметр отверстия не совпадал с диаметром втулочки наконечника. Пришлось немного рассверлить, а только после этого уже установили тяги:

Загерметизировали термоклеем отсеки с сервприводами:

Установили валолинии с винтами:

Изготовили моторамы и установили моторы:


Однако крепление на родной втулке оказалось не надёжным и мы решили переделать его и поставили другое, более надёжное:
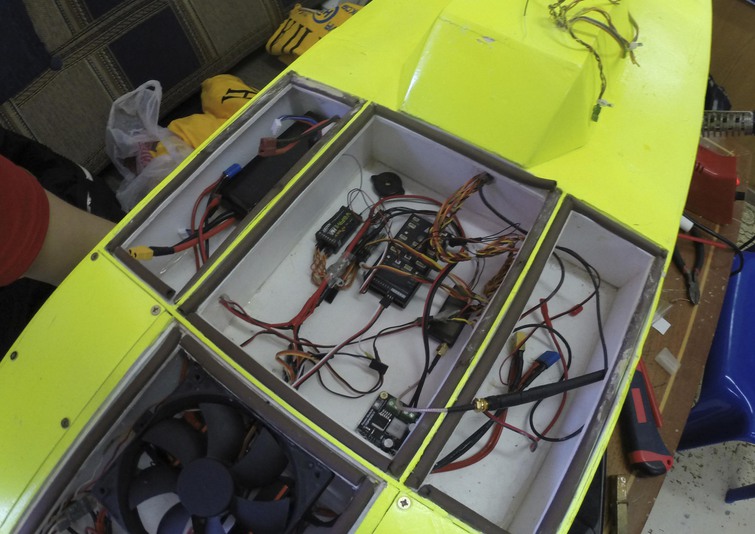
В отсек с регуляторами установили куллер
 Распечатали наклейки:
Распечатали наклейки:

Наконец-то настал долгожданный момент...
Установка самого главного - автопилот!
Иначе наш катер не сможет быть роботом.
НО... Чтобы не тратить время и нервы на воде, мы решили испытать автопилот в домашних условиях и смастерили стенд.
С мальчишками разбирались вместе, т.к. ни я ни, тем более, они раньше не работали с такой серьёзной техникой.

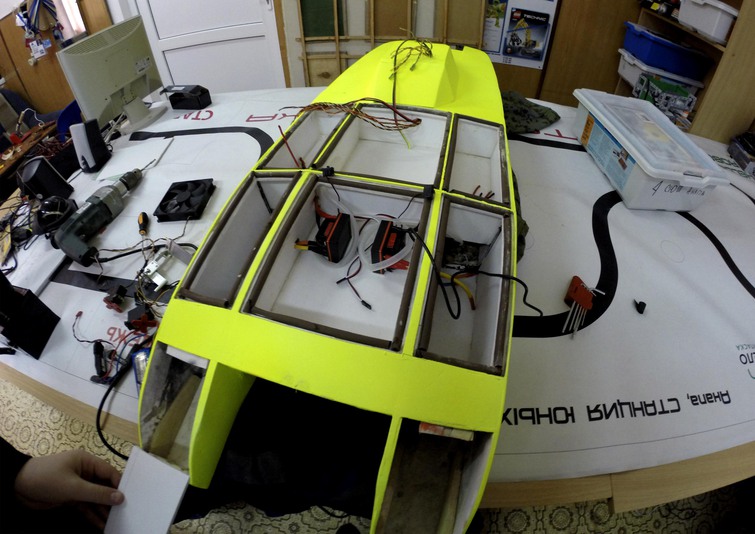
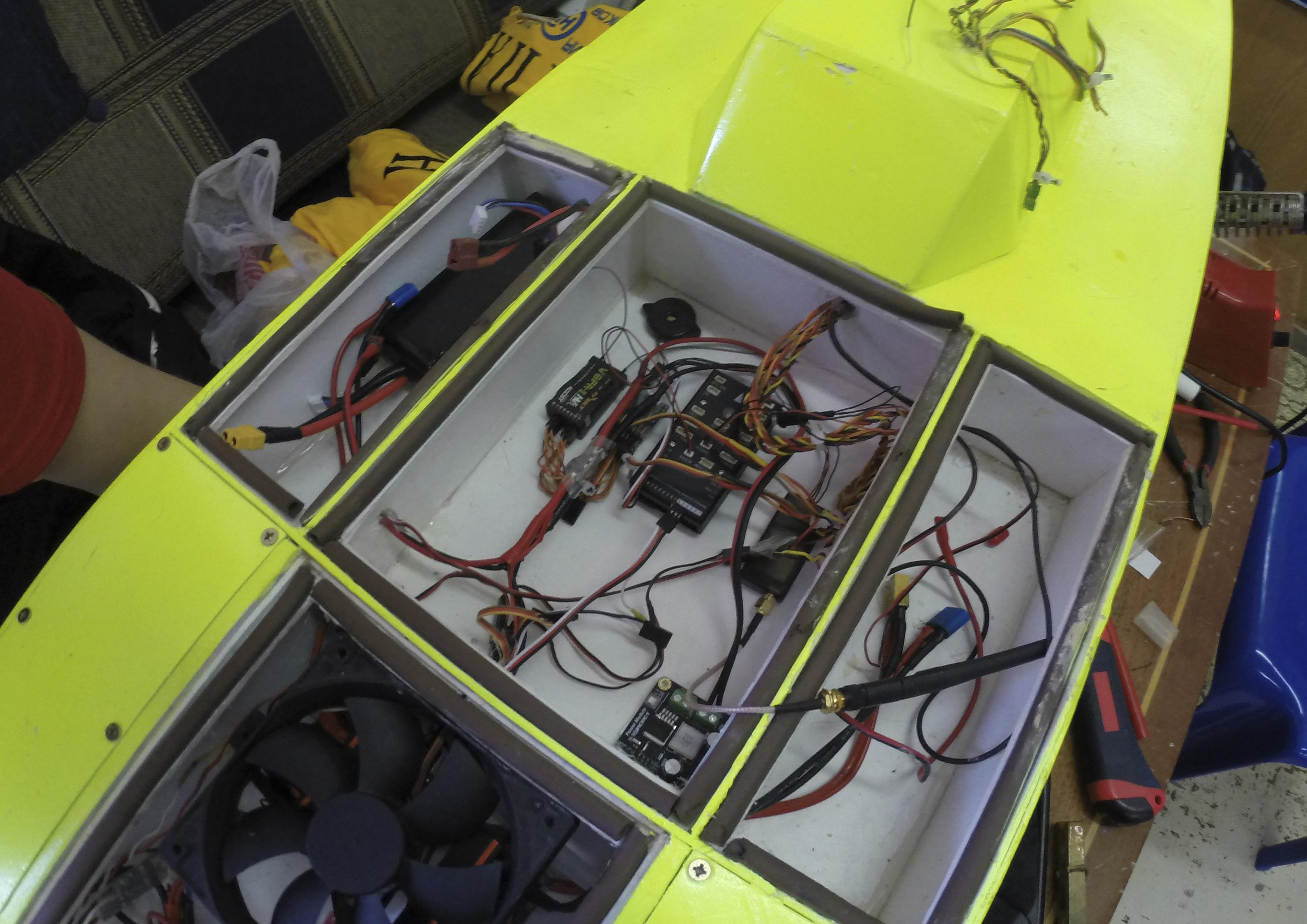
Параллельно с этим начали готовить разводку питания в корпусе:

Следующая фотография, скорее всего вызовет у Вас недоумение, и Вы, наверняка, зададите вопрос: "А машинка-то тут причём?!". Сразу отвечу - прошивка ArduRover вполне катит и на катер. Программу решили пробовать на автомодели.
Пришлось её (автомодель) немного переоборудовать:

После удачных испытаний на автомоделе (автомодель не пострадала, хотя носилась как угарелая), переставили автопилот на объект наших истязаний:
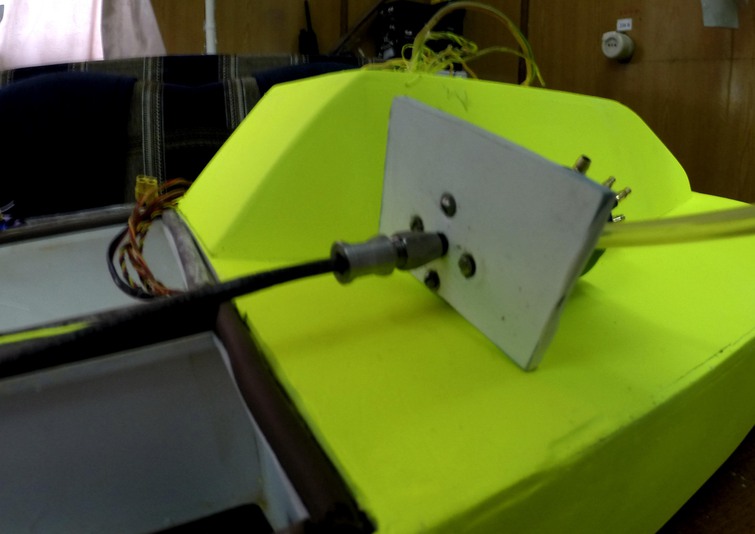
Затем установили разьёмные соединения на модуль видеокамеры.
Немного отклонюсь от темы, потому что хочу извиниться, что не фотографировал подробно постройку TV модуля; но с удовольствием расскажу, что он состоит из 3-х сервоприводов, примитивной камеры и NAZA-M-Lite в качестве системы стабилизации, видеопередатчик на 5.8 гГц мощьностью 800 мВт. (Всё это поместиось в упаковочном прозрачном боксе от ГоПро). Камера управляется по горизонту (вправо и влево) и продольному наклону, стабилизируется по горизонту и вертикали.
Этот модуль тоже делали дети, тоже под моим руководством (в плане "подключи это - туда, это - сюда; это - то, вот это - сё", размещали составляющие они сами)
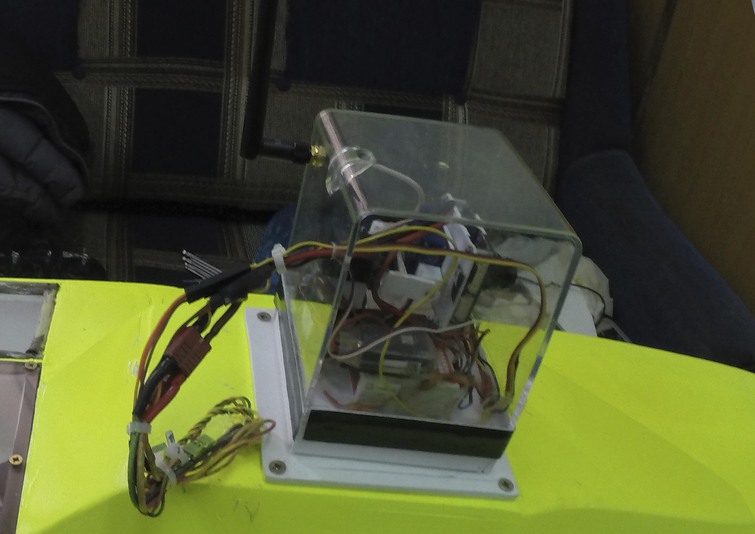
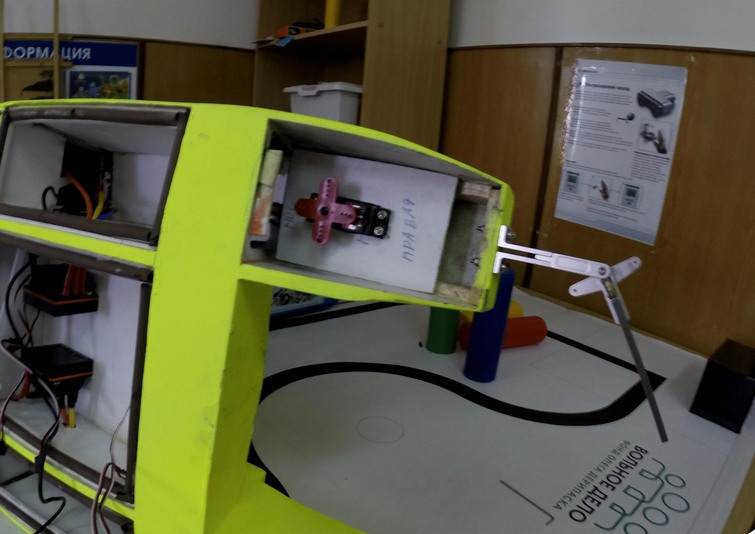
Для удбства эксплуатации и наглядности мы сделали крышку автопилотного отсека из оргстекла (точнее не из оргстекла, а из его аналога из полимеров. На языке название крутиться, а вспомнить не могу)
Последние штрихи - наклейки
И пойдём испытывать!
Наклейки грели феном и разглаживали сухой мягкой тряпочкой, плотно прижимая её к поверхности

Ну и как полагается в таких случаях должно быть видео с испытаний...
Вот, пожалуйста (автор видео Олег Теплицкий):
Испытания проводились только в ручном режиме в виду нехватки времени.
После фестваля в Москве обязательно испытаем в авторежимах.
Так же хочу отметить, что на испытаниях присутствовала заместитель директора Государственного природного заповедника Утриш.
Ольга Николаевна отметила, что это достаточно перспективная и нужная разработка для заповедника.
Ещё она предложила установить своё специальное оборудование для модернизации катера с целью повышения эффективности работы заповедника.
В заключении хотелось бы отметить энтузиазм мальчишек и стремление достичь положительных результатов.
P.S. Вот не полный список оборудования, применимого в нашем проекте:
2 вот таких мотора:
Двигатель Turnigy AquaStar 3660-2050KV
Модуль ФР скай:
FrSky DJT 2.4Ghz комплект для JR с модулем телеметрии и приемником V8FR-II
Видеопередатчик:
Видеопередатчик TX58-800 5.8Ghz 32CH 800mW
2 таких удлинителя:
Удлинитель SMA Male - SMA Female 180мм для Fatshark/ImmersionRC
2 рулевых устройства:
In-Line Strut Rudder Assembly (Large)
2 адаптера вала:
металлический адаптер вала.
Винты (3 комплекта заказали):
3-Blade Boat Propellers 40x55mm (2pcs/bag)
Антенна ГПС:
Quanum GPS модуль LEA-6H с компасом, корпусом и монтажной опорой
ППМ энкодер:
PPM-энкодер для HKPilot 32Датчик тока с разводкой питания:
HK Pilot Power VI Module, Distribution Board And Dual UBEC ALL-In-One (120A and 10s)
ОСД:
Minim OSD v1.1
Телеметрия:
HKPilot Transceiver Telemetry Radio Set V2 (433Mhz)
Конечно же сам процессор:
HKPilot32 Autonomous Vehicle 32Bit Control Set w/ Power ModuleИ многое другое...
P.P.S. Примим с пониманием любую критику, а также постараемся учесть Ваши пожелания.
Представляем Вам результат двухмесячного труда двух учащихся робототехнического кружка станции юных техников города-курорта Анапа.
В кратце о нас... Наша команда называется OmniKid (что в переводе означает всесторонне развитый ребёнок). Мы являемся призёрами соревнований по робототехнике в Краснодаре и Сочи (номинация Hello, Robot! траектория и биатлон роботов). После победы на соревнованиях регионального масштаба нам была предоставлена возможность заявить о себе на Всероссийском молодёжном робототехническом фестивале "Робофест-2015", который пройдёт в Москве 13 февраля 2015 года,
и в этот раз мы будем участвовать в категории Фристайл - исследовательские роботы.
Перед Вами автономный беспилотный многоцелевой катер охраны водного районоа Государственного природного заповеднника Утриш.
Основной задачей данного робота является видеомониторинг береговой черты и водного района охраняемого периметра.
Второстепенной - забор морской воды для лабораторного анализа;
- отслеживание мигрирующих редких видов птиц ;
- выявление нарушителей.
Данный робот оснащён гиростабилизированной камерой с технологией FPV; контроллером, позволяющим катеру работать в автономном режиме, а так же двумя мощными электрическими моторами.
Предлагаю рассмотреть данное устройство более подробно от постройки до испытаний.
Идея создания появилась у мальчишек после посещения экскурсии в заповеднике. Они заметили, что на охрану заказника тратится достаточно много сил и средств. По берегу ходят казачьи патрули, на воде патрулируют маломерные суда с двигателем внутреннего сгорания (не экологично получается) и экипажем на борту, по этому было принято решение о разработке и воплощении в жизнь чего-то менее затратного и не менее эффективного.
И так приступим:
У меня в гараже лежал катер катамаранного типа Mystic c5000 собственной постройки (тогда, когда я его строил, ещё не знал, что можно делиться своим опытом с товарищами на ПаркФлаере), так вот, решили за основу взять его:


Сначала сняли остатки электроники, выломали не нужные и хлипкие части корпуса. Преимущественно корпус построен из ПВХ 3мм, с бальзовыми вставками по борту:

Ободрали наклейки и старую краску:

Начали изготовление герметичных отсеков:

Установили электрическую помпу (в правую лыжу) для принудительного охлаждения регуляторов и заклеели входное отверстие двустороннем скотчем на время постройки и покраски (при незначительном переоборудовании эта помпа может накачать воду в резервуар для лабораторного анализа):


Так же добавили по контуру отсеков специальные полосочки из ПВХ на которые наклеели уплотнитель для окон (в дальнейшем это нам поможет для герметизации отсеков):
Практически подготовили корпус к шпаклеванию:


Начали шпаклевать и зачищать (применяли обычную автомобильную шпаклёвку):

Нам было необходимо установить нашу камеру на какой-то надстройке, но и с этой задачей мальчишки справились.
Из ПВХ толщиной 3 и 4 мм изготовили надстройку и протянули провода (на фото выше).
И, при покраске сразу допустили ошибку. Начали наносить краску предварительно НЕ загрунтовав поверхность.
Вот что получилось:

Потом всё-таки поняли, что делаем что-то не то и решили спросить как правильно. Нам ответили, что грунтовать нужно обязательно.
Загрунтовали и приступили к покраске:

Первые слои краски:


Настал долгожданный момент уставки оборудования.
Решили начать с регуляторов хода и трубки принудительного охлаждения:
Затем появилась необходимость создать (срочно) презентационную обложку (вы её видели в самом начале).
За одно и примерили изготовленный модуль видеопередачи:

Продолжили работу над проектом установкой сервоприводов и рулей направления.
Установили площадки для серв, укрепили площадки установки рулей:
Начали установку валолиний. Проделали прямоугольной отверствие в днище моторного отсека и установили медную трубку.
При установке стальных тяг с металлическими наконечниками возникла проблема: диаметр отверстия не совпадал с диаметром втулочки наконечника. Пришлось немного рассверлить, а только после этого уже установили тяги:

Загерметизировали термоклеем отсеки с сервприводами:

Установили валолинии с винтами:

Изготовили моторамы и установили моторы:


Однако крепление на родной втулке оказалось не надёжным и мы решили переделать его и поставили другое, более надёжное:
В отсек с регуляторами установили куллер
 Распечатали наклейки:
Распечатали наклейки:
Наконец-то настал долгожданный момент...
Установка самого главного - автопилот!
Иначе наш катер не сможет быть роботом.
НО... Чтобы не тратить время и нервы на воде, мы решили испытать автопилот в домашних условиях и смастерили стенд.
С мальчишками разбирались вместе, т.к. ни я ни, тем более, они раньше не работали с такой серьёзной техникой.

Параллельно с этим начали готовить разводку питания в корпусе:

Следующая фотография, скорее всего вызовет у Вас недоумение, и Вы, наверняка, зададите вопрос: "А машинка-то тут причём?!". Сразу отвечу - прошивка ArduRover вполне катит и на катер. Программу решили пробовать на автомодели.
Пришлось её (автомодель) немного переоборудовать:

После удачных испытаний на автомоделе (автомодель не пострадала, хотя носилась как угарелая), переставили автопилот на объект наших истязаний:
Затем установили разьёмные соединения на модуль видеокамеры.
Немного отклонюсь от темы, потому что хочу извиниться, что не фотографировал подробно постройку TV модуля; но с удовольствием расскажу, что он состоит из 3-х сервоприводов, примитивной камеры и NAZA-M-Lite в качестве системы стабилизации, видеопередатчик на 5.8 гГц мощьностью 800 мВт. (Всё это поместиось в упаковочном прозрачном боксе от ГоПро). Камера управляется по горизонту (вправо и влево) и продольному наклону, стабилизируется по горизонту и вертикали.
Этот модуль тоже делали дети, тоже под моим руководством (в плане "подключи это - туда, это - сюда; это - то, вот это - сё", размещали составляющие они сами)
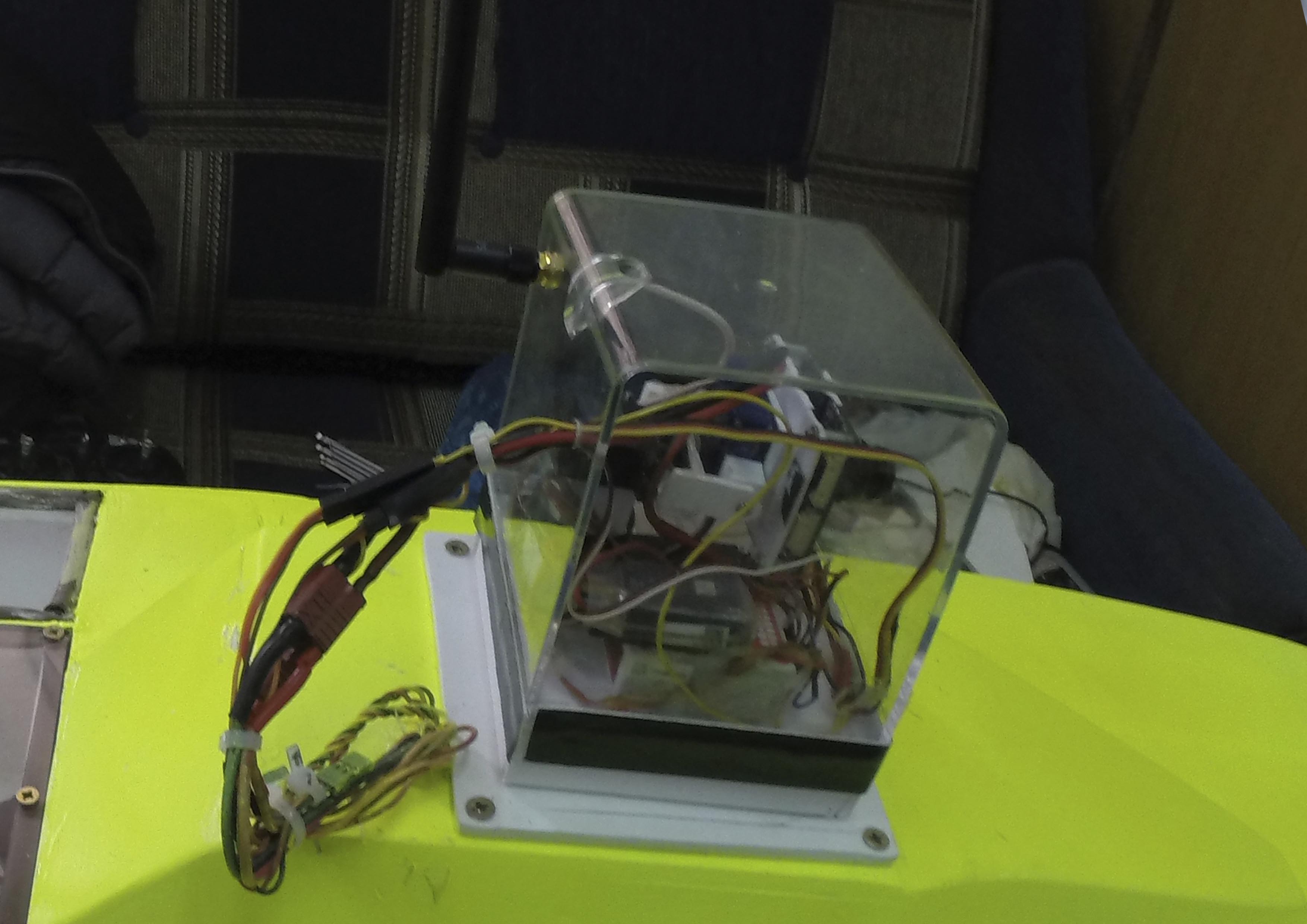
Для удбства эксплуатации и наглядности мы сделали крышку автопилотного отсека из оргстекла (точнее не из оргстекла, а из его аналога из полимеров. На языке название крутиться, а вспомнить не могу)
Последние штрихи - наклейки
И пойдём испытывать!
Наклейки грели феном и разглаживали сухой мягкой тряпочкой, плотно прижимая её к поверхности

Ну и как полагается в таких случаях должно быть видео с испытаний...
Вот, пожалуйста (автор видео Олег Теплицкий):
Испытания проводились только в ручном режиме в виду нехватки времени.
После фестваля в Москве обязательно испытаем в авторежимах.
Так же хочу отметить, что на испытаниях присутствовала заместитель директора Государственного природного заповедника Утриш.
Ольга Николаевна отметила, что это достаточно перспективная и нужная разработка для заповедника.
Ещё она предложила установить своё специальное оборудование для модернизации катера с целью повышения эффективности работы заповедника.
В заключении хотелось бы отметить энтузиазм мальчишек и стремление достичь положительных результатов.
P.S. Вот не полный список оборудования, применимого в нашем проекте:
2 вот таких мотора:
Двигатель Turnigy AquaStar 3660-2050KV
Модуль ФР скай:
FrSky DJT 2.4Ghz комплект для JR с модулем телеметрии и приемником V8FR-II
Видеопередатчик:
Видеопередатчик TX58-800 5.8Ghz 32CH 800mW
2 таких удлинителя:
Удлинитель SMA Male - SMA Female 180мм для Fatshark/ImmersionRC
2 рулевых устройства:
In-Line Strut Rudder Assembly (Large)
2 адаптера вала:
металлический адаптер вала.
Винты (3 комплекта заказали):
3-Blade Boat Propellers 40x55mm (2pcs/bag)
Антенна ГПС:
Quanum GPS модуль LEA-6H с компасом, корпусом и монтажной опорой
ППМ энкодер:
PPM-энкодер для HKPilot 32Датчик тока с разводкой питания:
HK Pilot Power VI Module, Distribution Board And Dual UBEC ALL-In-One (120A and 10s)
ОСД:
Minim OSD v1.1
Телеметрия:
HKPilot Transceiver Telemetry Radio Set V2 (433Mhz)
Конечно же сам процессор:
HKPilot32 Autonomous Vehicle 32Bit Control Set w/ Power ModuleИ многое другое...
P.P.S. Примим с пониманием любую критику, а также постараемся учесть Ваши пожелания.













Благодаря вашим комментариям, мы на начальном этапе применения модели смогли выявить недостатки и вскоре внесем изменения в конструкцию.
Вы задавали много интересных вопросов, на которые я старался давать ответы. Завтра наступает первый этап Всероссийского конкурса. Благодаря вам, дорогие цензоры, мы будем готовы дать ответы на наиболее задаваемые вопросы.
Спасибо всем за обсуждение данной темы!
1) Все провода и разъёмы, находящиеся снаружи (как на видео болтающиеся провода от камеры) - в условия наличия солёных брызг окислятся и отвалятся в течение одного дня. Проверено.
2) Герметизацию надо рассчитывать исходя из того, что лодка перевернётся. Она 100% перевернётся, и не раз
3) Как уже говорили - кулер для регуляторов нафиг не нужен
4) Все платы должны быть обработаны лаком (например, Plastik 71) и герметиком (я нашёл нейтральный герметик Момент - воняет растворителем, а не уксусом. К электронике пассивен) Осторожней с платой контроллера - на ней барометр, его лаком заливать не стоит. Для защиты от воды можно прикрыть поролоном - хоть какую-то защиту он обеспечит.
5) GPS убрать со штанги, прилепить прямо на корпус лодки в место, где под ним отсутствуют силовые провода
6) В идеале, заменить винты на водомёты - но, скорее всего, это нереально.
7) Если у вас есть два движка - зачем ещё и рули? Разве недостаточно изменять только тягу движков? Более того, с автомобильной прошивкой регуляторов - можно делать даже их реверс.
Но просто дам инфу про возможность. Практически любой регуль можно сделать с реверсом. Есть проект "Multiwii3D". В регуляторы можно прошить альтернативную прошивку (переделанный СаймонКерби), где за ноль оборотов принята середина диапазона газа. Минимум газа - это полный газ "назад", максимум диапазона газа - это полный газ "вперед".
Я проводил эксперименты на регуляторе Blueseries - всё работало как надо. БК движок крутился и вперед и назад в зависимости от положения стика газа. Единственное - аккуратно с перекладыванием газа в инверт - при сильном броске возникают большие токи.
Даже делал такой квадрокоптер (могущий летать в инверте), но у меня была неэффективная ВМГ, и я вдобавок не обладаю требуемым скиллом. Поэтому пока это направление отложил.
Вот видео (не моё) по моей теме:
Почитать ещё можно тут.
Возможно ни вам ни автору статьи это и не пригодится, просто чтобы Олег знал, что такая возможность есть.
Прогнозируются некоторые проблемы при подключении к полетному контроллеру (кстати, как и с автомобильными). Просто сможет ли контроллер ТАК управлять двумя движками - я не знаю. Там реализована схема управления по "руддеру" (направление) через серву, а не миксом тяговых движков...
Функция дифференциального управления моторами есть, но пока не осваивал.
Если все будет хорошо, то летом дадим жАру этому водоплаву.
В одном из комментариев я описывал его мореходные качества. В море он уже был.
Как поведет себя с этим оборудованием в море самому интересно
На испытания-то не пришёл.
Ставим тебе прогул =)
Насчет видеолинка, по воздуху одно, а по земле/воде другое. Расчитывать на большие расстояния не стоит. Вместо квадратной коробки от GoPro я рекомендую поставить бокс купольного типа от систем видеонаблюдения (цена вопроса 250 руб). Нужно ли стабилизировать изображение с камеры c помощью Naza-lite? Мне кажется на катере это не нужно. Жаль, что в приведенном в статье видео нет фрагмента с видеолинка, так можно было оцентить данную стабилизацию при тряске на волнах.
Летаем над сушей, вывешиваем в 400-500 метрах над землей - только за зарядом следить...
Над водой радиоволны распространяются гораздо дальше, чем над землей. Ни кахих бугров и поворотов реки не будет.
Сегодня к нам заходила заместитель директора заповедника и мы обсудили вопрос о наблюдении за птицами по прибытии из Москвы.
За одно можем испытать автоматические режимы управления и катер сопровождения будет тоже.
Ну и просто для примера табличкой (первый столбец высота одной антенны, второй - второй антенны, третий дальность связи предельная):
4м 1м 9.2км
5м 1м 10км
6м 1м 10.9км
7м 1м 11.6км
8м 1м 12.3км
9м 1м 13км
10м 1м 13.6км
10м 2м 14.2км
Видно что увеличили высоту антенны на берегу в 2.5 раза а расстояние увеличилось в полтора раза. Для последнего примера увеличили высоту второй антенны в два раза а расстояние изменилось на пол километра.
Собственно если мы ограничены высотой антенны на катере скажем в метр или два метра то для связи на 20км нам придется поднимать первую антенну на высоту 23 метра! нормальная такая удочка? :) Причем напоминаю это по ровной глади, а с рекой так вобще первый изгиб реки и видеосвязи больше нет.
Опасаться плавающих веревок, безусловно, нужно, но от этого никуда не денешься.
Если модель останется парализованной, то конечно, нужно будет её реанимировать.
Если браконьеры, как Вы говорите, захотят завладеть такой штукой, то пусть владеют на здоровье.
Катер оснащён автономным gps трекером, получается, что злоумышленники на ведут на себя кого следует с точностью до двух метров :-)
И так денег туда вбухано :-)
В открытом море Вам будет тяжело со связью - катер ниже волн.