Доброго времени суток товарищи моделисты! Почти закончил я сборку своего первого квадрокоптера, и появились несколько вопросов которые хотелось бы задать "бывалым" людям :)
Собственно вот такая штука получилась:

Собственно вот такая штука получилась:

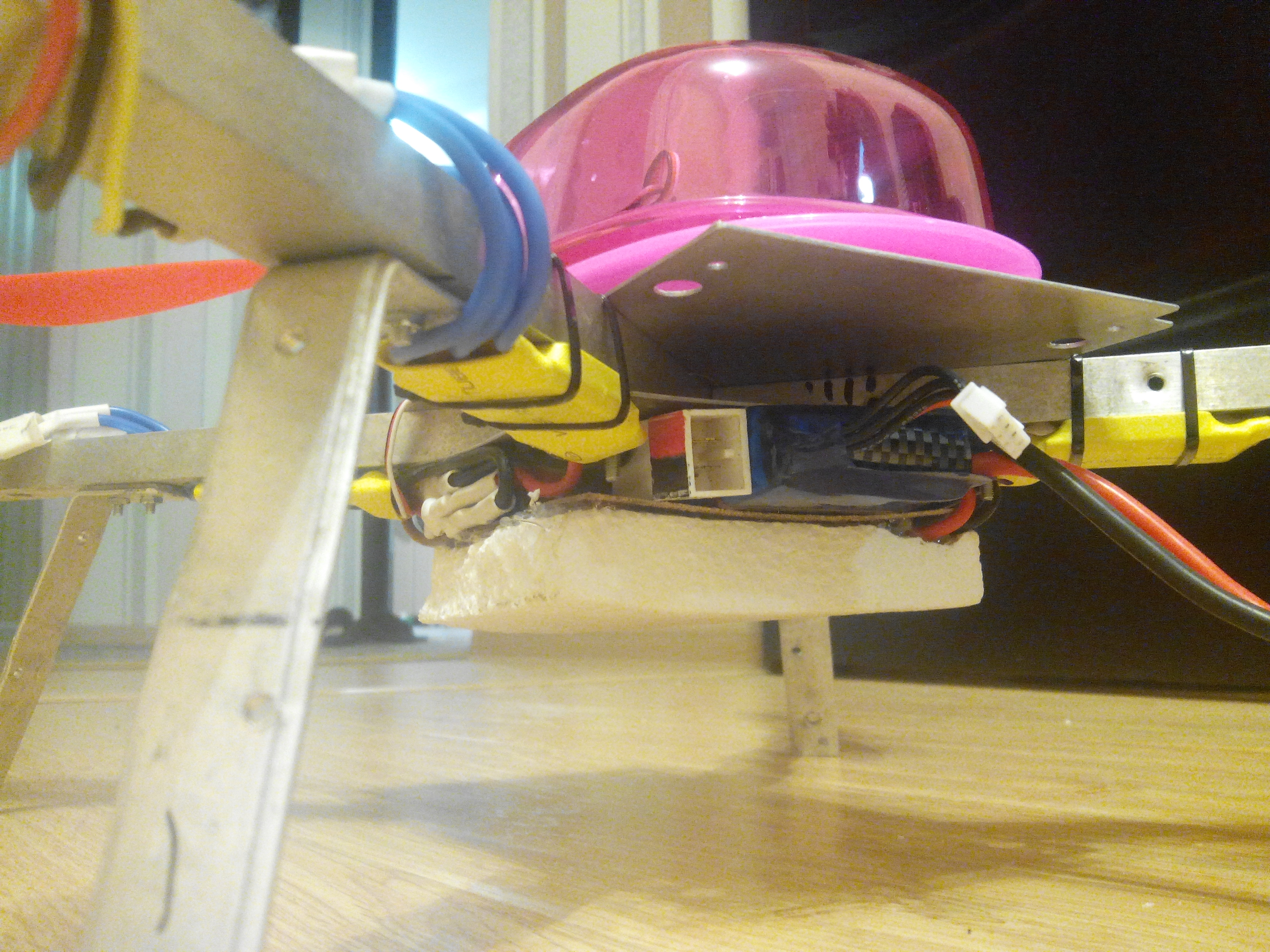
Какие особенности установки полетного контроллера моего на раму? Можно просто прикрутить винтами к корпусу, или же устанавливать на виброзащитные покрытия? и каким образом? многие устанавливают на пластиковые болты и гайки, но смысл от них? я так понимаю что в "Акро" моде это будет не важно, так как берутся вроде только значения гироскопа, а линейные ускорения ему по барабану, а вот в режиме "Горизонтальной стабилизации" где уже подключается акселерометр будут проблемы.
и еще один вопрос по массе моего ЛА:
Вес получился 1300 грамм (вместе с аккумом) , моторы такие, винты такие, аккумулятор 3300мА 45с. не многоват ли получился вес? раму делал из алюминия.
и еще вопрос по регуляторам:
регуляторы китайские типа "NoName" вот такие. есть ли у кого опыт их использования? возможно стоит настроить их под квадрокоптеры? как?
ну и просто хотелось бы услышать критику по моему аппарату :)
p.s. аппаратура РУ такая, она еще в пути.
.jpg) Передатчик Turnigy 9X (Mode2 - газ СЛЕВА, 9 каналов, версия 2). В/ч модуль и приёмник (8 каналов)
Передатчик Turnigy 9X (Mode2 - газ СЛЕВА, 9 каналов, версия 2). В/ч модуль и приёмник (8 каналов)  Товар http://www.parkflyer.ru/product/8992/
Товар http://www.parkflyer.ru/product/8992/ Спасибо за внимание, извиняйте если вопросы слишком глупые, это мой первый ЛА.













А так бутербродница прикольная!
Но всегда проверяю все характеристики вот этим!
Ваш вариант кажется такой, может и ошибаюсь: http://rc-calc.com/c/Q88BQI
а почему такой тяжолый?? на днях прикидывал такойже,в районе 860 грамм получается.батарея 2.2А а так все тоже.плюс ак для света и сам свет+автопилот+ фпв+ак для него 1160гр.