Здравствуйте, уважаемые авиамоделисты! Хотел бы начать свою статью с небольшого предисловия.
В моделизм я окунулся не так давно, всего около 3-х лет назад, начинал как многие с самолетов, построил не менее 14 штук, все пенолеты, занялся FPV. Смотрел на мультироторные системы, но останавливала цена комплектующих и, как мне казалось, сложность настройки. Около года назад я всё-таки решился попробовать данный перспективный тип ЛА, и в преддверии моего ДР заказал комплектующих для сборки...

В моделизм я окунулся не так давно, всего около 3-х лет назад, начинал как многие с самолетов, построил не менее 14 штук, все пенолеты, занялся FPV. Смотрел на мультироторные системы, но останавливала цена комплектующих и, как мне казалось, сложность настройки. Около года назад я всё-таки решился попробовать данный перспективный тип ЛА, и в преддверии моего ДР заказал комплектующих для сборки...

Здравствуйте, уважаемые авиамоделисты! Хотел бы начать свою статью с небольшого предисловия.
В моделизм я окунулся не так давно, всего около 3-х лет назад, начинал как многие с самолетов, построил не менее 14 штук, все пенолеты, занялся FPV. Смотрел на мультироторные системы, но останавливала цена комплектующих и, как мне казалось, сложность настройки. Около года назад я всё-таки решился попробовать данный перспективный тип ЛА, и в преддверии моего ДР заказал комплектующих для сборки. Выбирал основываясь на информации полученной на форумах и цены. Хотелось собрать подешевле, т.к. было не ясно, увлекут ли меня мультироторы и получиться ли что-либо вообще, но в то же время и побольше - с заделом аэрофотосъемки на будущее. Опишу комплектацию сразу, т.к. она полностью перекочевала с моего первого коптера на данный проект. Итак, на RC Timer-е были заказаны моторы, адаптеры и комплект APM 2.5.2 c ЖПС и радиомодемами на 433Мгц:
 RCTimer BC2830/11 1000KV Outrunner Brushless Motor
RCTimer BC2830/11 1000KV Outrunner Brushless Motor
 Товар http://www.parkflyer.ru/product/1466887/
Товар http://www.parkflyer.ru/product/1466887/
 RCTimer ArduFlyer V2.5.2 Flight Controller(Top Pin Version)
RCTimer ArduFlyer V2.5.2 Flight Controller(Top Pin Version)
Товар http://www.parkflyer.ru/product/1525839/
Моторы откровенно дешёвые и страдают врожденным дисбалансом, как оказалось, но зато дешевые, решил что на первое время пойдет. Почему APM? Ответ прост – просто я люблю всё открытое, где можно поковыряться и.т.д. Да и цена играет немаловажную роль! На HK взял проверенные Афрорегули на 30А, акки 3S на 5000мАч, винты на 11 дюймов и остальной мелочевки:
.jpg) Afro ESC 30Amp Multi-rotor Motor Speed Controller (SimonK Firmware)
Afro ESC 30Amp Multi-rotor Motor Speed Controller (SimonK Firmware)
Товар http://www.parkflyer.ru/product/988598/
.jpg) ZIPPY Flightmax 5000mAh 3S1P 30C
ZIPPY Flightmax 5000mAh 3S1P 30C
Товар http://www.parkflyer.ru/product/8587/
 11 x 5 Thin Style E-Prop Black Counterclockwise Rotation (2pc)
11 x 5 Thin Style E-Prop Black Counterclockwise Rotation (2pc)
Товар http://www.parkflyer.ru/product/1182301/
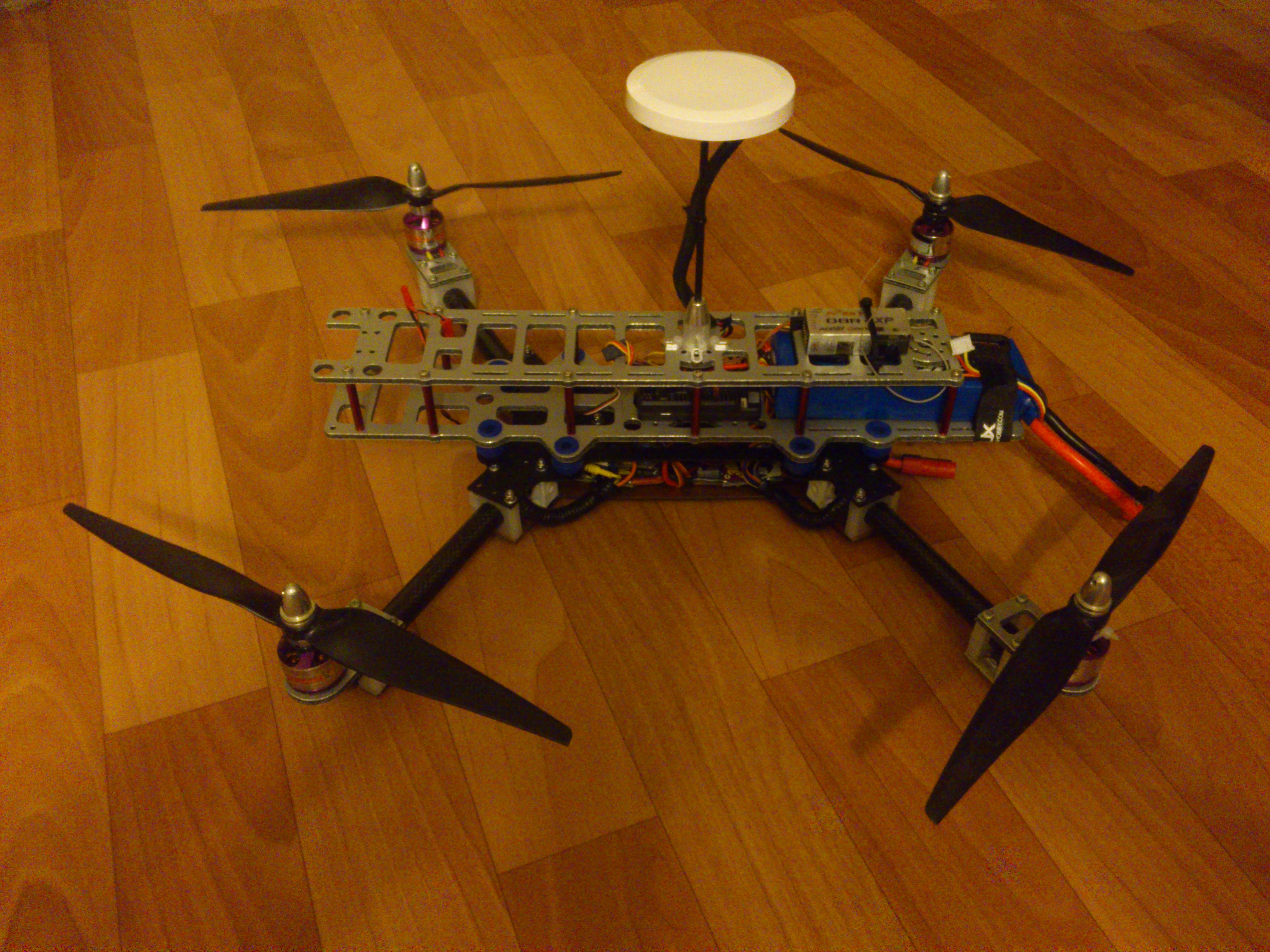
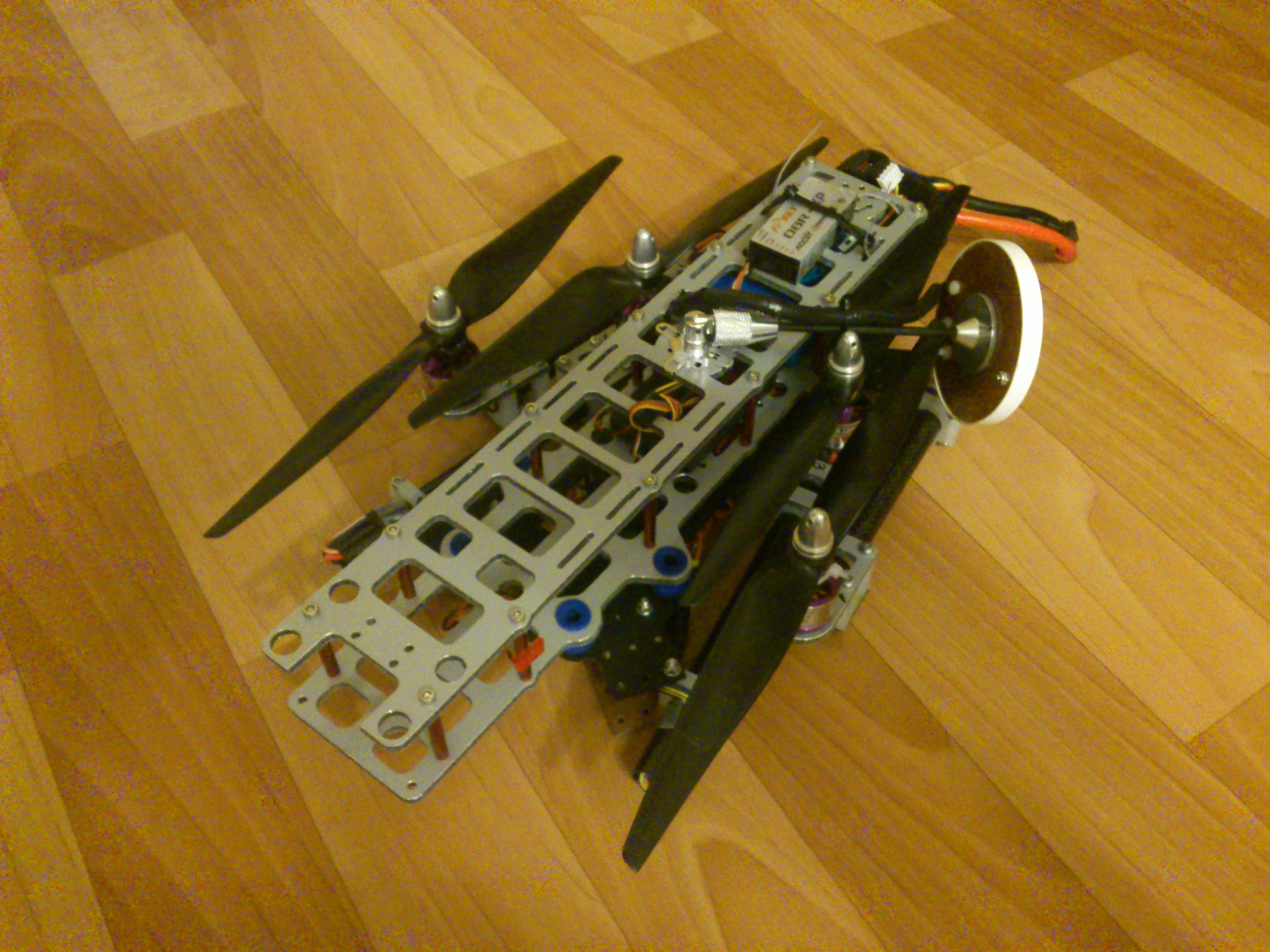
Раму изготовили на ЧПУ домашнем станке(благо брат увлекается) из алюкобонда ("бутерброд" из пластмассы и алюминия), чертежи взял понравившиеся на форуме, получился вот такой аппарат:

Тема про него на форуме: http://rc-aviation.ru/forum/topic?id=7376
Аппарат претерпел много изменений в процессе эксплуатации и стал для меня настоящей учебной партой и летающей лабораторией. Но пришел момент когда захотелось сделать более эстетичный коптер, чтобы провода не торчали во все стороны, а так же решить ряд недостатков нынешней рамы. Начал поиски рамы, очень понравилась складная из карбоновых трубок, здесь была статья про неё. И тут попалась на глаза рама QAV500 от Lumenier -http://www.lumenier.com/products/multirotors/qav500 . Рама типа H, хороша для FPV – винты в кадр лезть не будут, интересное решение с разделением «грязной» и «чистой» частей рамы, в «грязной» находиться силовая часть(регули, БП на 5в и.т.д), а в «чистой» соответственно - полетный контроллер, приемник и.т.д., к тому же между этими частями есть виброразвязка! За счёт того что тяжёлый аккум находиться в «чистой» части, получается эффективная работа виброгасящих проставок, как следствие отсутствие эффекта желе на видео и общее уменьшение вибраций на контроллер и подвес. Решил строить!
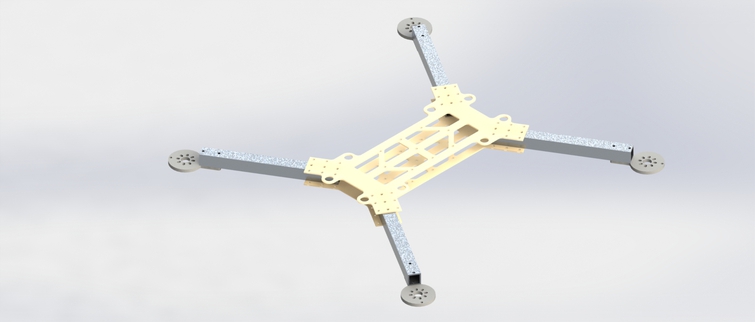
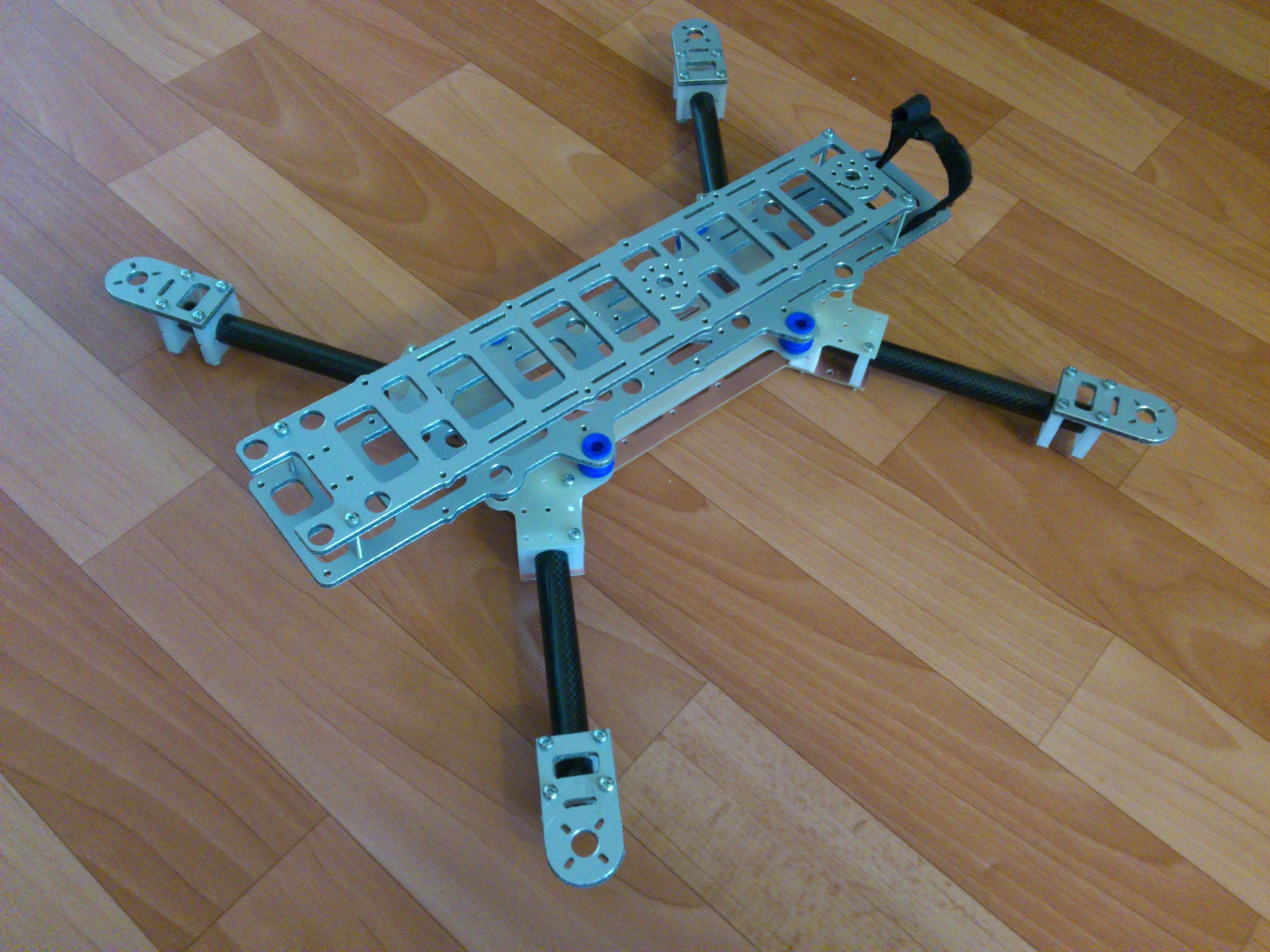
Готовых чертежей не было, поэтому раму стал разрабатывать сам в SW, опираясь на картинки оригинального QAV500, свои размеры и нужды. Получилась вот такая модель:



Для изготовления рамы были закуплены карбоновые трубки диаметром 16мм и длиной 330мм:
http://ru.aliexpress.com/item/4-Pcs-Lot-Carbon-Fiber-Tube-3K-Twill-16mm-Diameter-330mm-Long-for-Quadcopter-Multicoptor-20380/1144859556.html
А так же резиновые демпферы на 150г., применяемые для подвесов, и алюминиевые стойки:
 Виброзащитные стойки (синие, 150 г на стойку), 8 шт.
Виброзащитные стойки (синие, 150 г на стойку), 8 шт.
Товар http://www.parkflyer.ru/product/1084889/
 H250 ZMR250 Frame Kit Parts CNC Aluminum Column M5x35MMxM3
H250 ZMR250 Frame Kit Parts CNC Aluminum Column M5x35MMxM3
Товар http://www.parkflyer.ru/product/1692474/
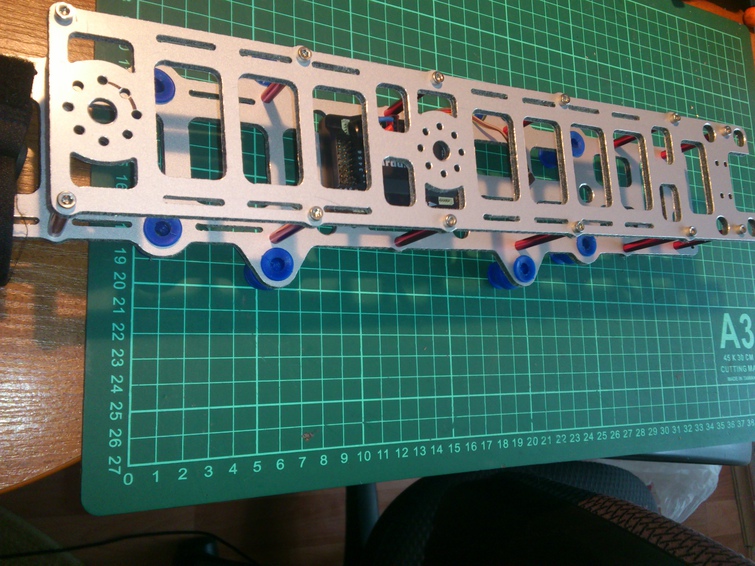
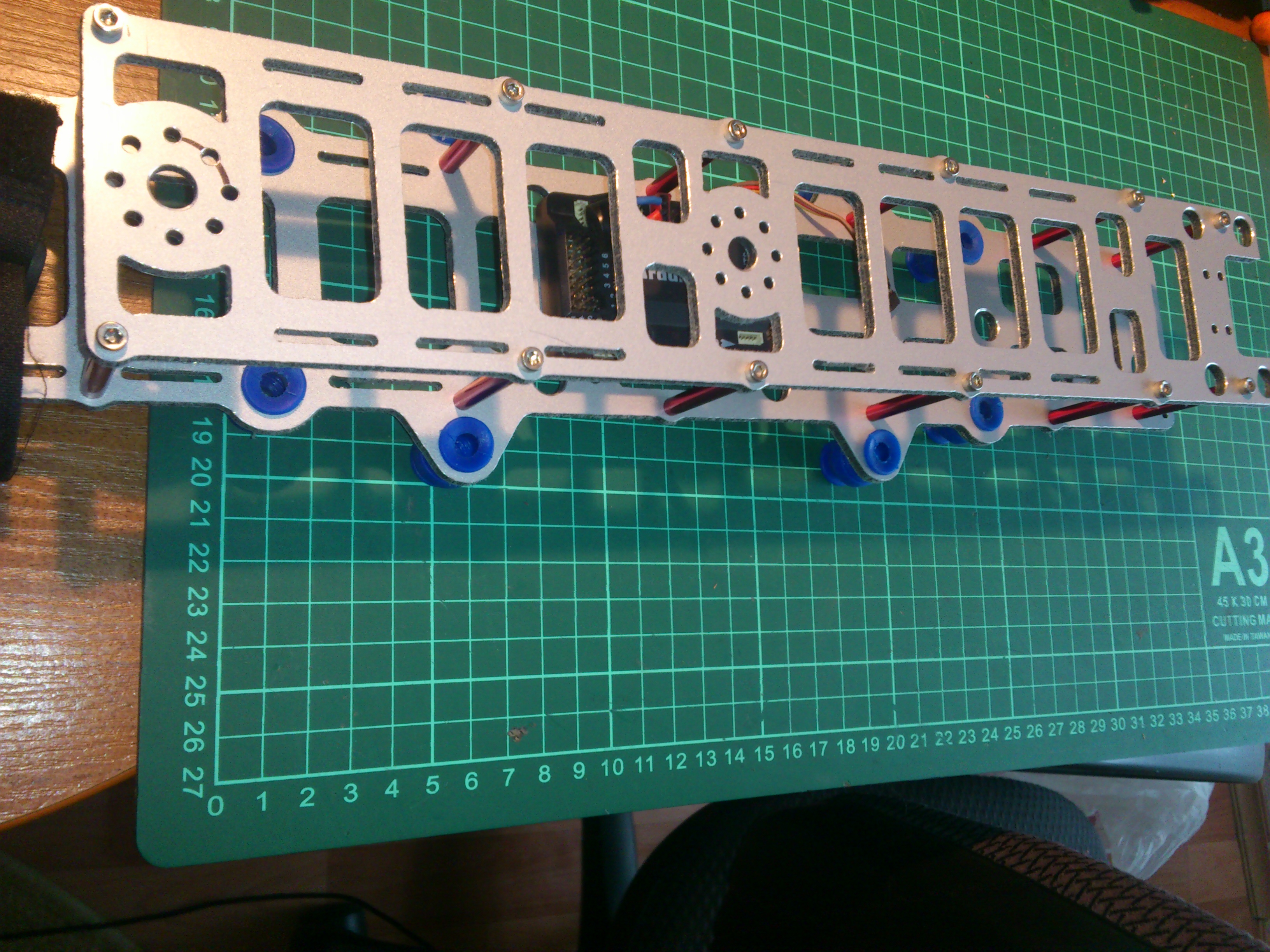
Для «грязной» части взял лист фольгированного текстолита, и лист обычного, для «чистой» - алюкобонд. Сделали нарезку на станке:
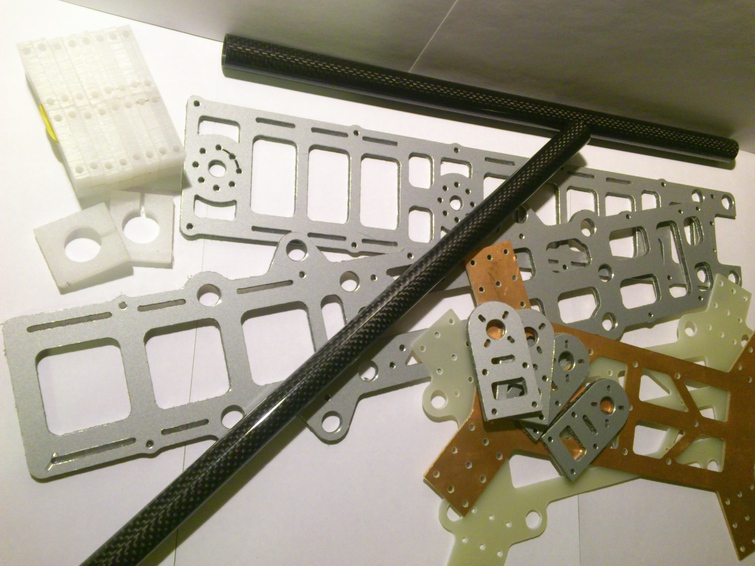
Вес: нижняя грязная - 38г. верхняя грязная - 43г. нижняя чистая - 87г. верхняя чистая - 67г. моторама - 7г.
ИТОГО - 266г. Солид ошибся всего на 5г.
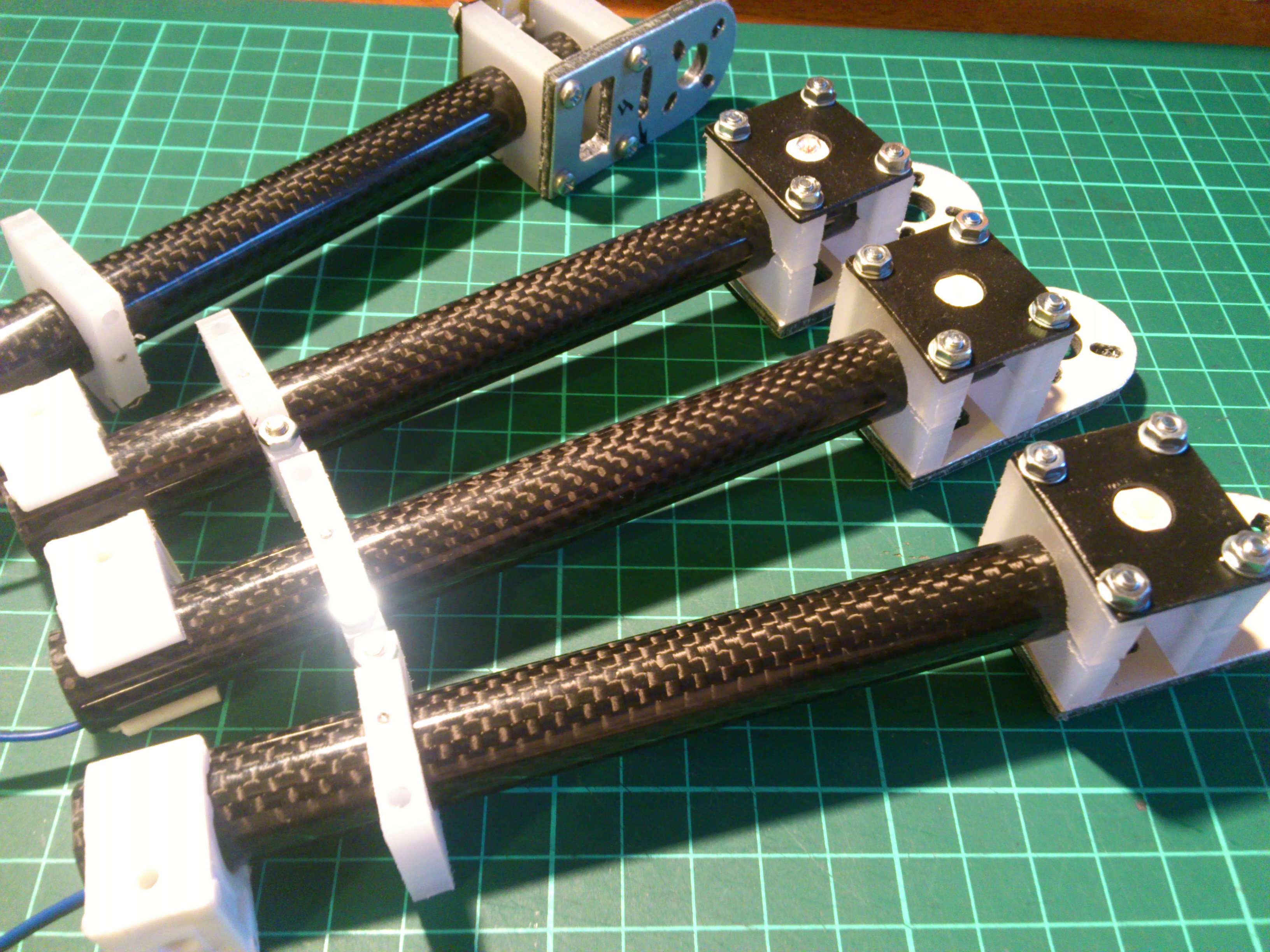
Хомуты также на станке, из пластиковой разделочной доски, затем просверлил отверстия на сверлильном станке. Кстати, дизайн рамы я разрабатывал так, что она может быть как складной, так и нет, и в место карбоновых трубок можно использовать например алюминиевый профиль. Я решил делать складной.
Вот пример модели с алюминиевыми лучами:
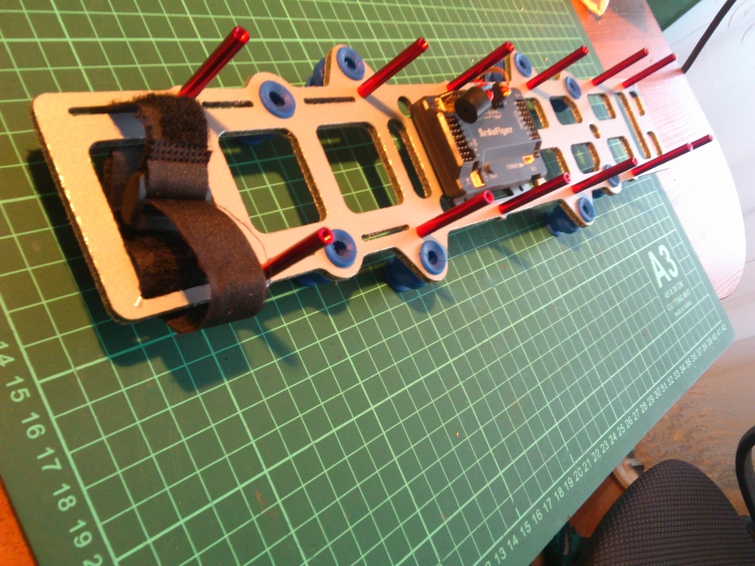
Сделал прикидочную сборку:
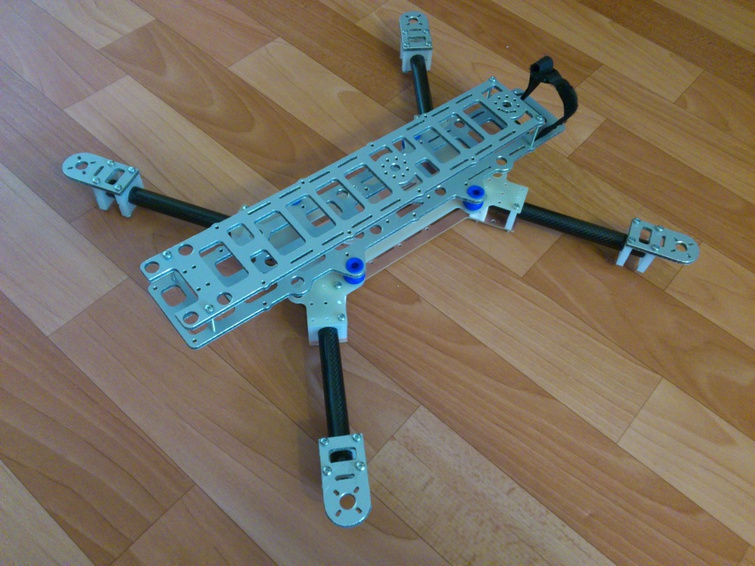
Сравнение с предшевствеником:

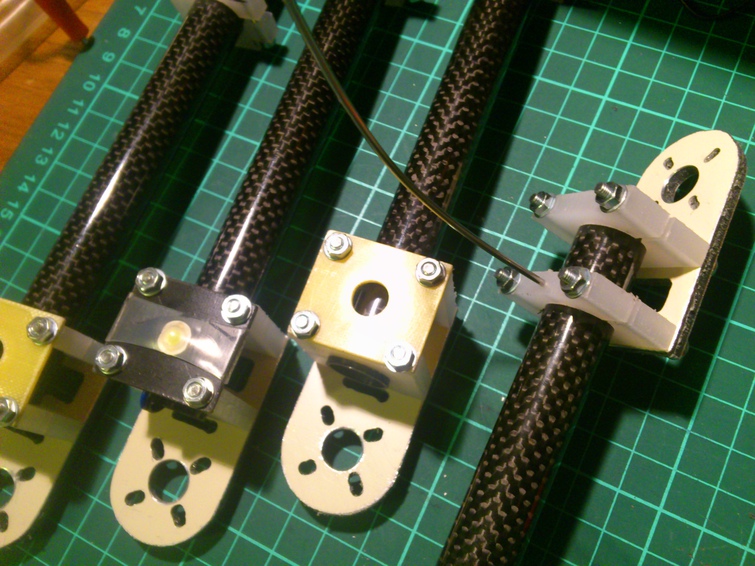
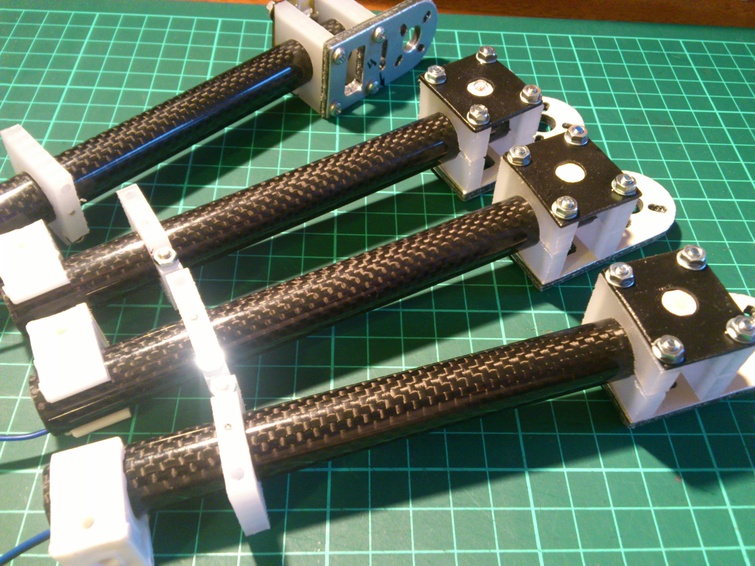
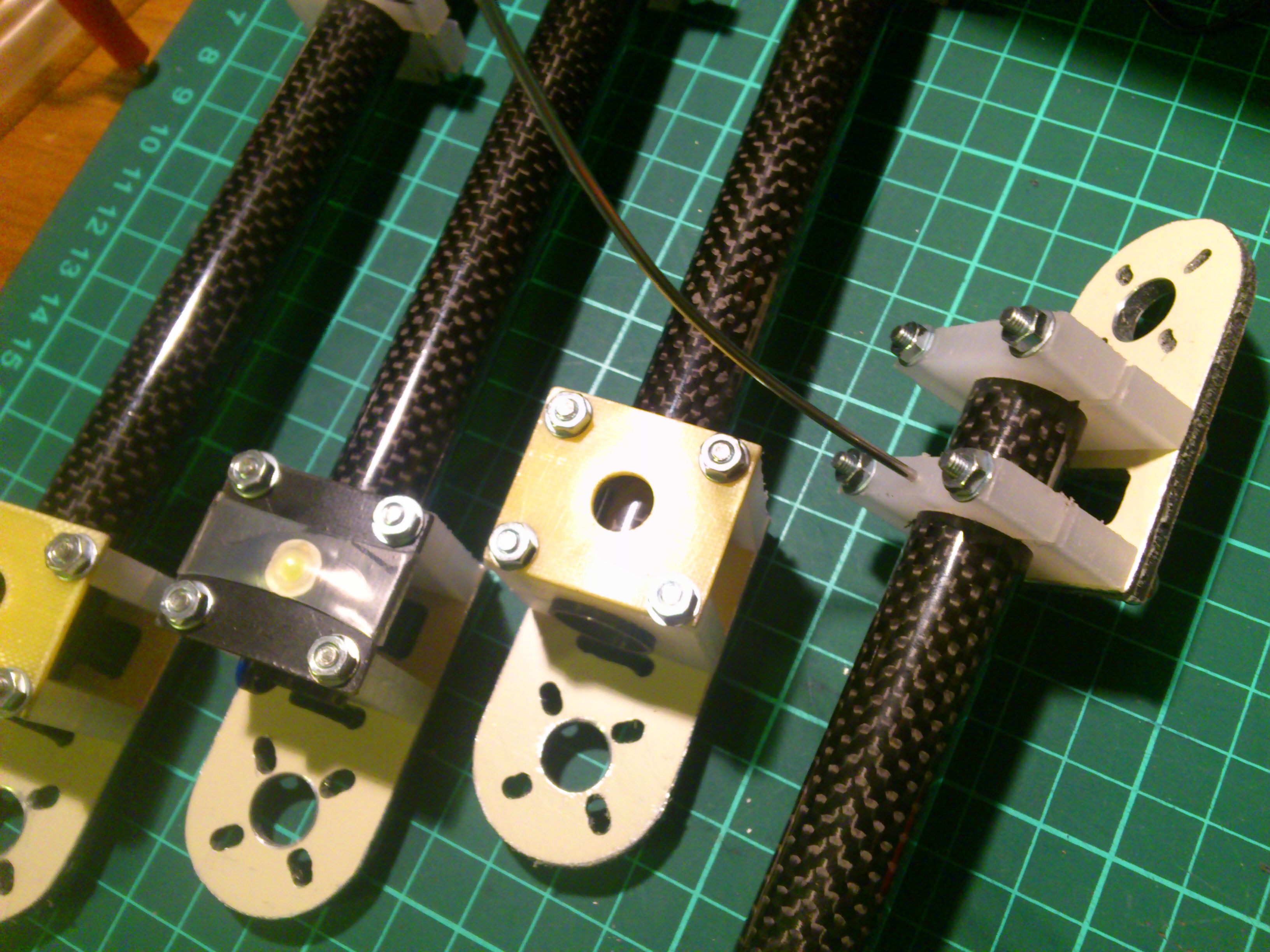
Затем разобрал, покрасил нужные элементы и стал потихоньку собирать, решил добавить подсветку на ЛА в виде мощных 1Вт светодиодов красного и белого цвета, работа в режиме вкл, выкл и стробоскопы, информацию по БАНО можно посмотреть здесь http://rc-aviation.ru/mtech/46-avtech/1460-bano . При сборке лучей хомуты дополнительно шплинтовал проволокой для надёжности:
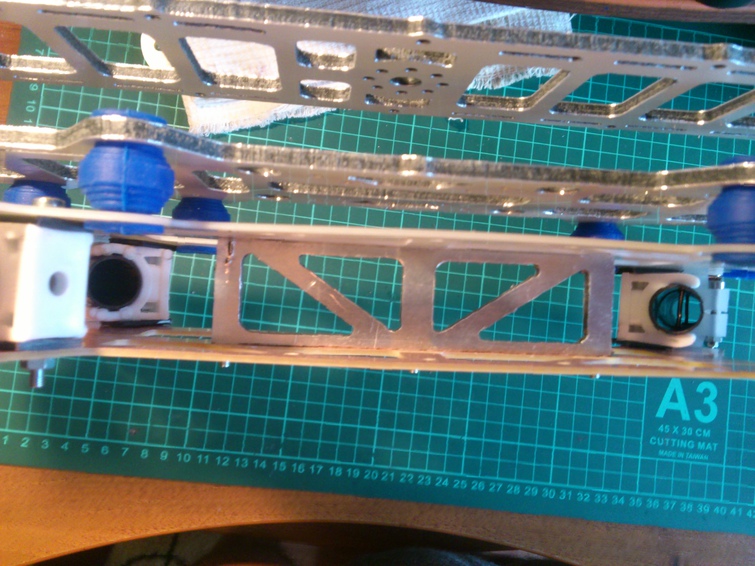
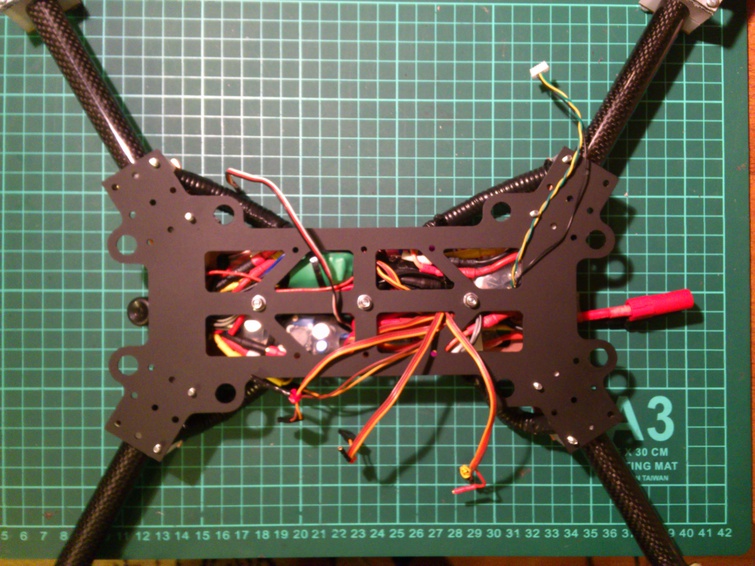
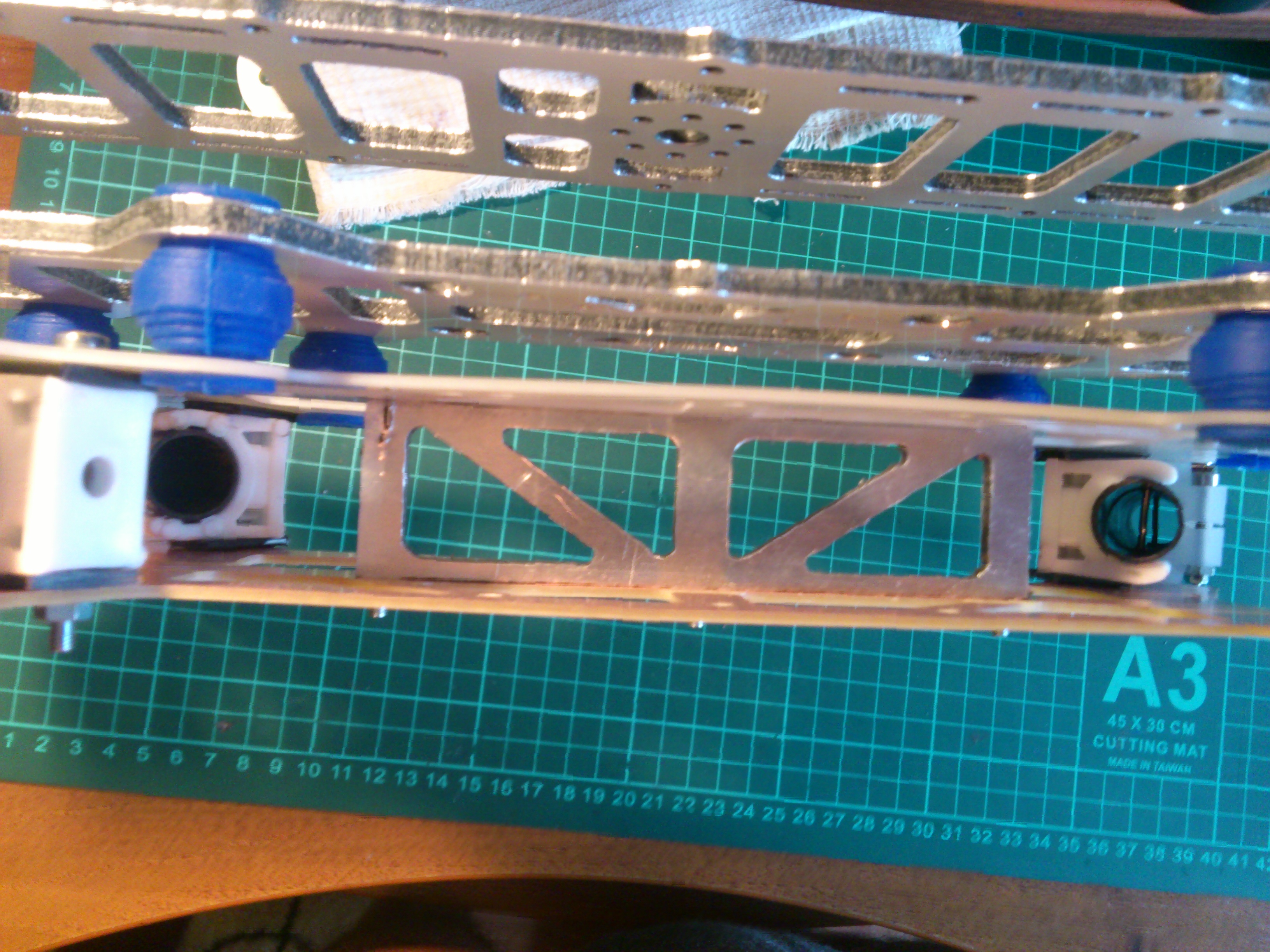
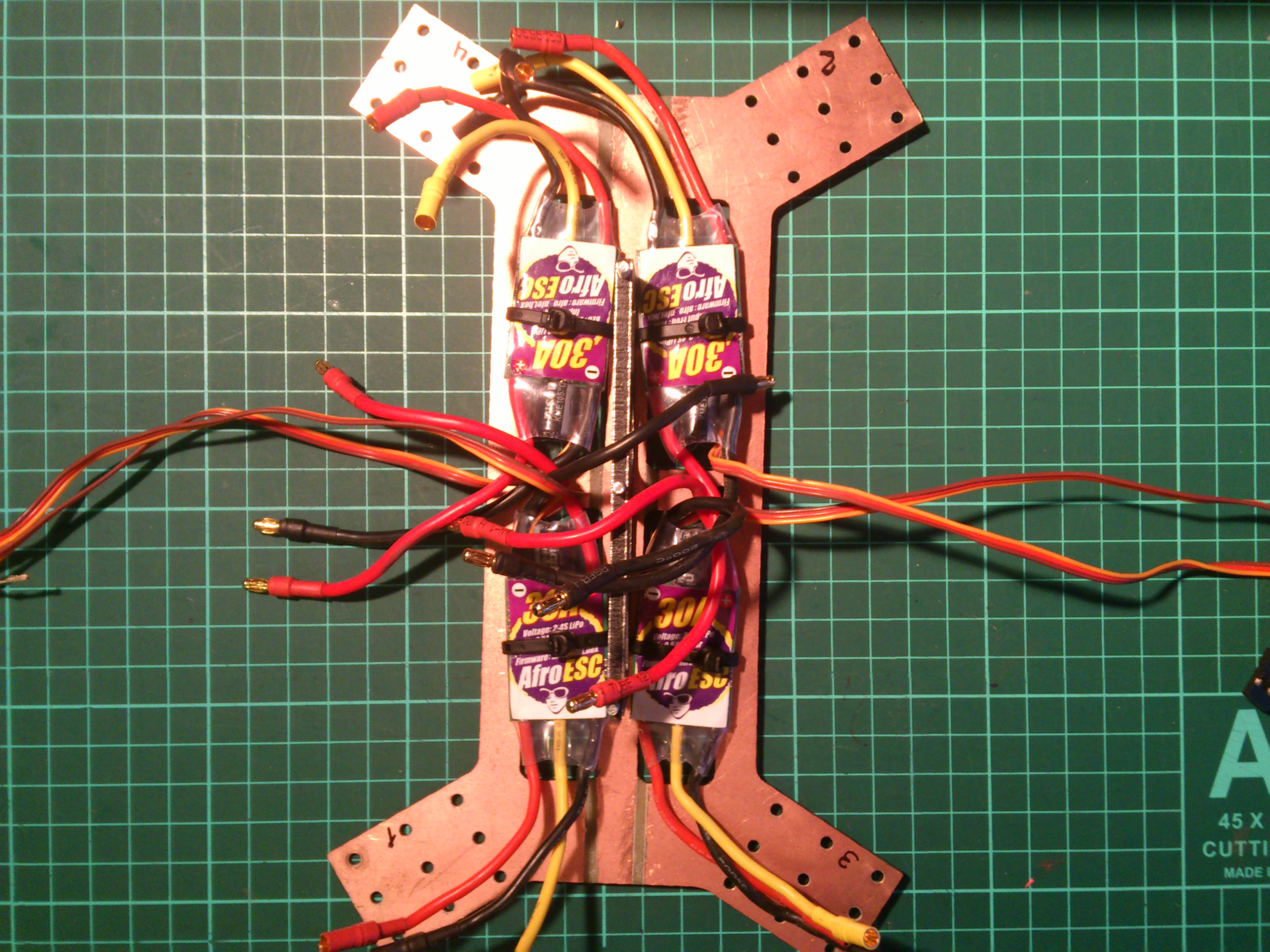
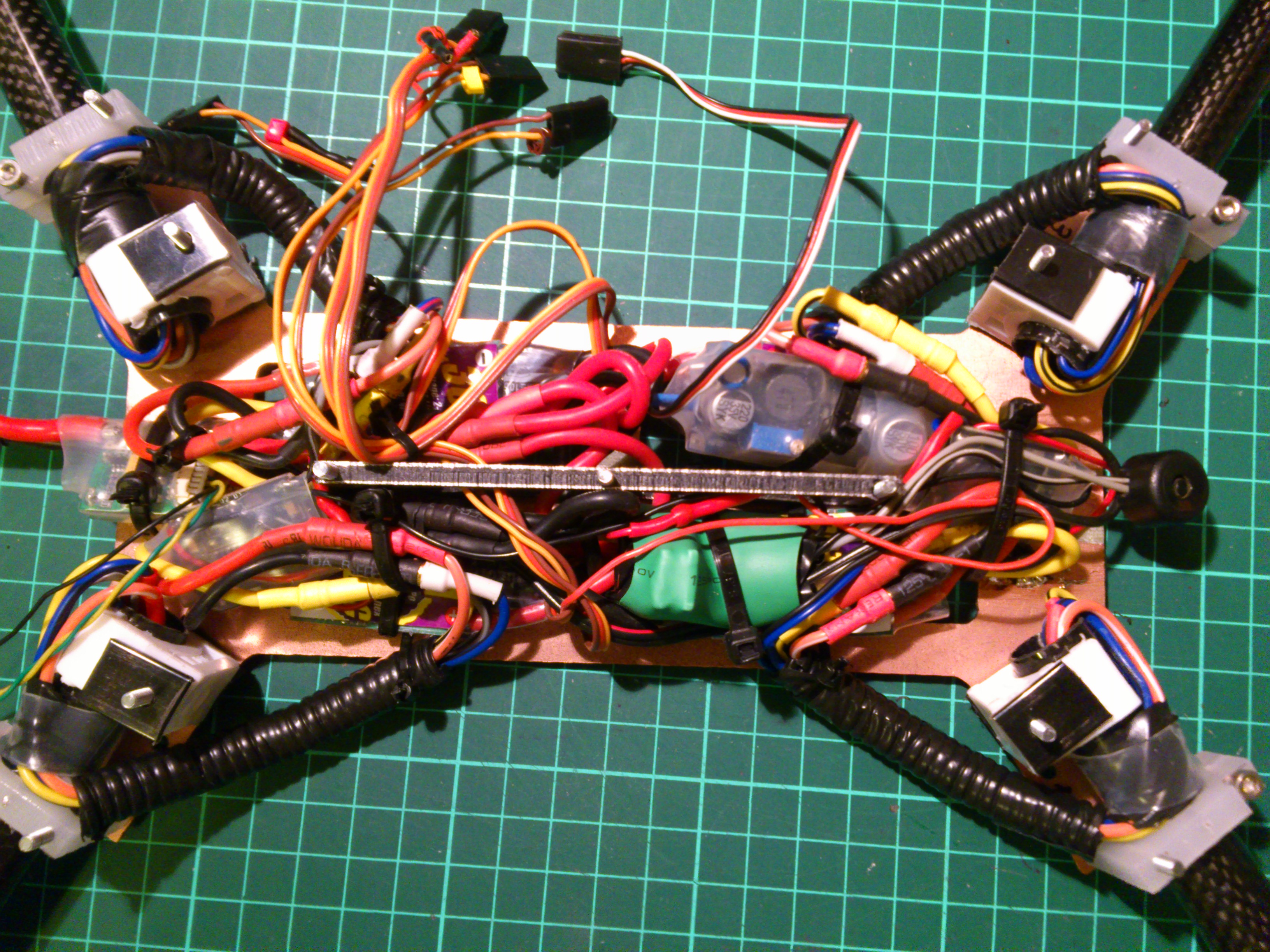
Во время сборки смутила продольная жесткость «грязной» части, поэтому туда добавил стрингер:
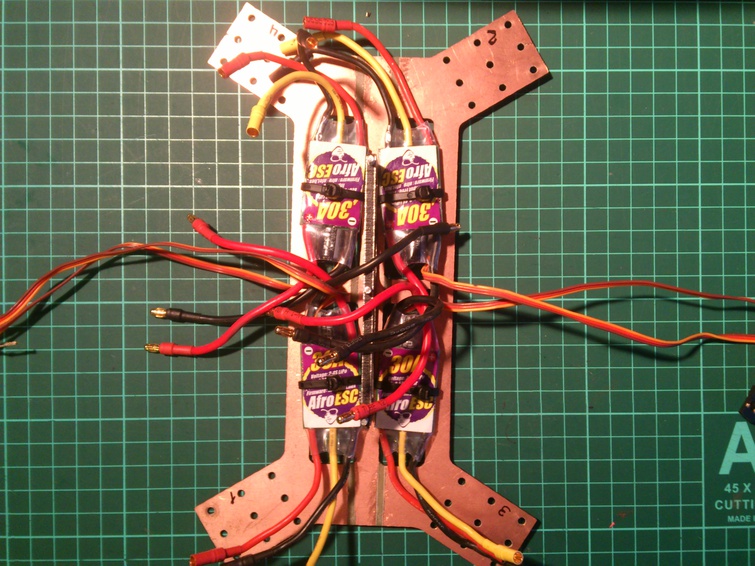
сборка "грязной" части:
Как успел заметить внимательный читатель - механизм складывания - это хомуты-защёлки для пластиковых труб.
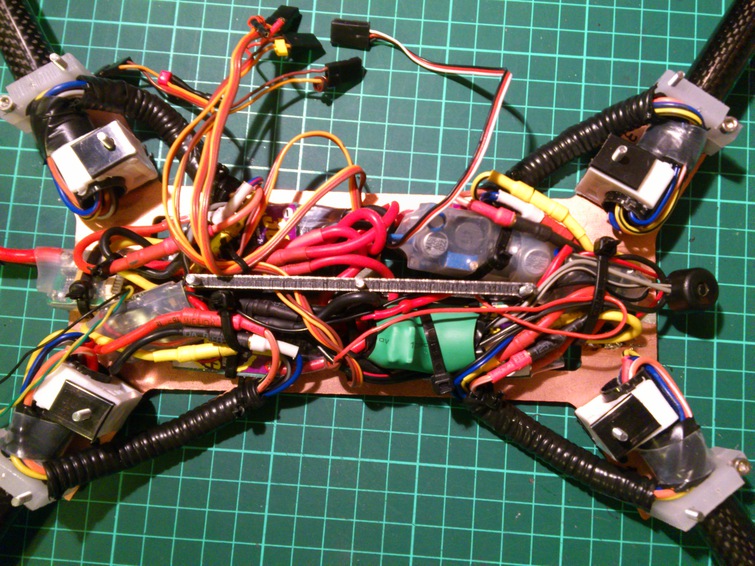
плотненький монтаж получается:
на фото видны регули, PM, БП для APM, плата БАНО, драйверы для светодиодов.
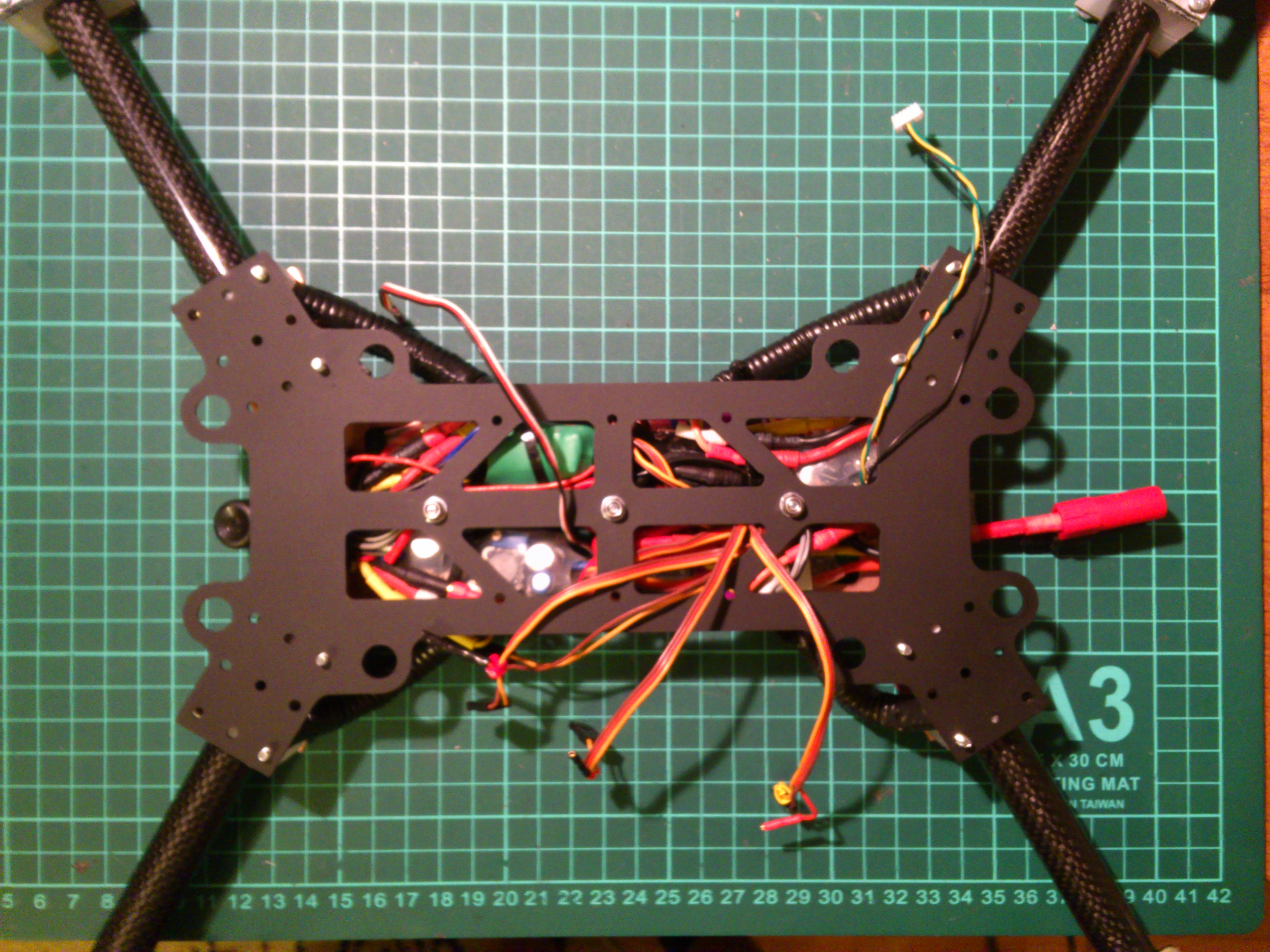
закрываем нижний бутерброд:
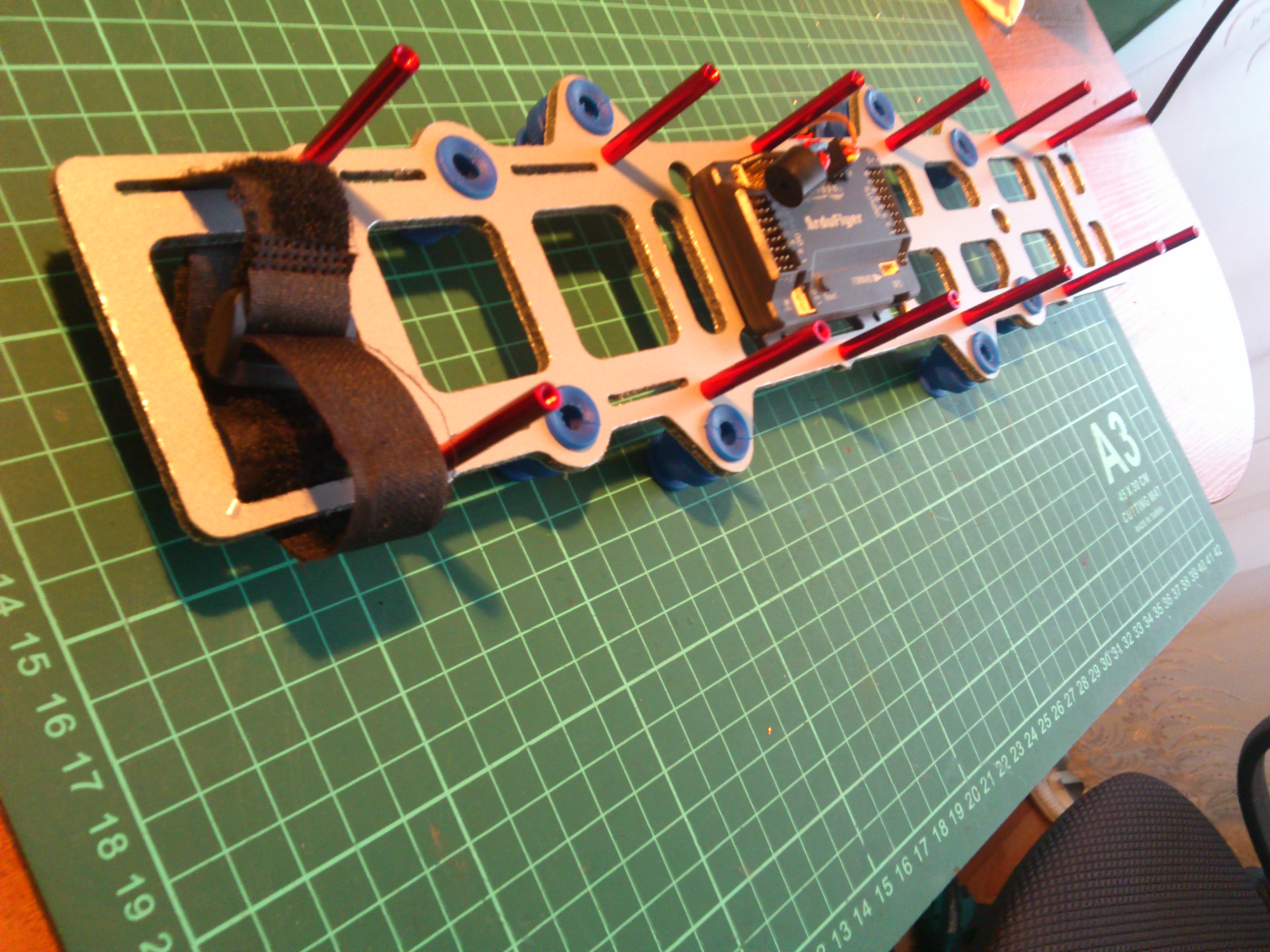
сборка чистой части:
нафаршировываем электроникой:
примерно так в сложенном виде:
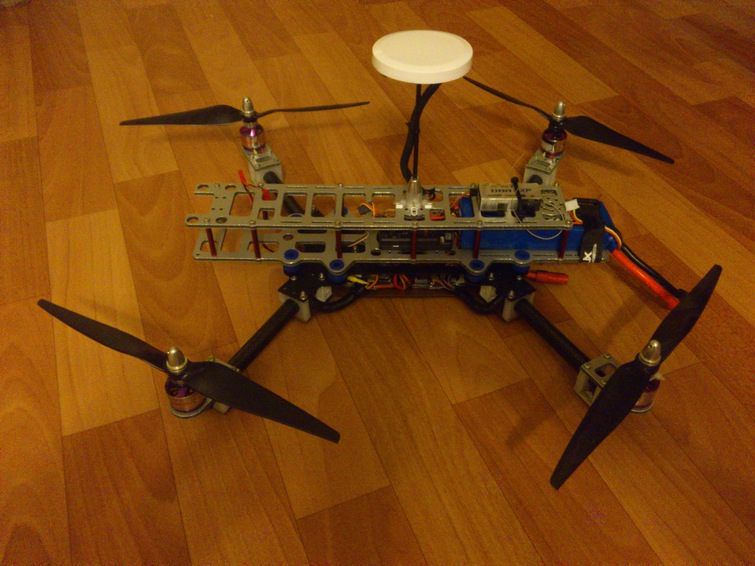
Всё собирается красиво и просто, не сложнее кит-набора! Единственно немного вызвал затруднение механизм складывания, уложить провода так чтобы ничего, нигде не задевало и всё, везде вмещалось. Диагональ по итогу получилась 510мм, вес полётный с подвесом и камерой - 1800г., время полёта около 8-9мин.,
По поводу подвеса, он самодельный, рычаги из алюминия(чертежи есть в архиве), выпиливал вручную, электроника следующая:
 Бесколлекторный контроллер подвеса Tarot ZYZ22 GOPRO a Gimbal Controller
Бесколлекторный контроллер подвеса Tarot ZYZ22 GOPRO a Gimbal Controller
Товар http://www.parkflyer.ru/product/1024434/
 Quanum 2208 Precision Brushless Gimbal Motor (GoPRO size 100-200g)
Quanum 2208 Precision Brushless Gimbal Motor (GoPRO size 100-200g)
Товар http://www.parkflyer.ru/product/1023749/
Ну и конечно фотографии с полевых испытаний и полётов:





Ссылки на чертежи прилагаю, ссылка на полный проект для SW 2014+DXF файлы, несколько фото и картинок:
https://cloud.mail.ru/public/F7Ws/CSrq2mtfH 82Мб
Для тех кто не хочет много качать, то просто файлы DXF под резку на станок, или можно просто распечатать и пилить руками, кому как нравиться!:
https://cloud.mail.ru/public/B9Bw/bQv8GX5Kn 18Кб
тема проекта тут: http://rc-aviation.ru/forum/topic?id=7837&p=2
Бонусом видео о моей реплике:
P.S. 1 июня 2015г. Борт был безвозвратно утерян, предполагаемая причина – пропало питание на APM, поиски не увенчались успехом, причина – халатность. Имеется GPS треккер.
- но зачем его цеплять к аппарату?
- Это же занимает кучу времени, включить, прикрепить, да и лишний вес ни к чему! Да я и летать то далеко не собираюсь!
Так что уважаемые авиамоделисты не повторяете чужих ошибок – всегда применяйте средства для поиска модели в случае крушения!
К этому проекту я собираюсь вернуться, но позже, с другой комплектацией и материалами, но это будет уже другая история….
P.P.S Сейчас работаю над проектом 250 миникоптера, проект тут http://rc-aviation.ru/forum/topic?id=7761
Видео:
Рама и комплектуха будут изменены, но не буду раскрывать все карты!
Всем удачных полётов!
В моделизм я окунулся не так давно, всего около 3-х лет назад, начинал как многие с самолетов, построил не менее 14 штук, все пенолеты, занялся FPV. Смотрел на мультироторные системы, но останавливала цена комплектующих и, как мне казалось, сложность настройки. Около года назад я всё-таки решился попробовать данный перспективный тип ЛА, и в преддверии моего ДР заказал комплектующих для сборки. Выбирал основываясь на информации полученной на форумах и цены. Хотелось собрать подешевле, т.к. было не ясно, увлекут ли меня мультироторы и получиться ли что-либо вообще, но в то же время и побольше - с заделом аэрофотосъемки на будущее. Опишу комплектацию сразу, т.к. она полностью перекочевала с моего первого коптера на данный проект. Итак, на RC Timer-е были заказаны моторы, адаптеры и комплект APM 2.5.2 c ЖПС и радиомодемами на 433Мгц:
RCTimer BC2830/11 1000KV Outrunner Brushless Motor Товар http://www.parkflyer.ru/product/1466887/
RCTimer ArduFlyer V2.5.2 Flight Controller(Top Pin Version) Товар http://www.parkflyer.ru/product/1525839/
Моторы откровенно дешёвые и страдают врожденным дисбалансом, как оказалось, но зато дешевые, решил что на первое время пойдет. Почему APM? Ответ прост – просто я люблю всё открытое, где можно поковыряться и.т.д. Да и цена играет немаловажную роль! На HK взял проверенные Афрорегули на 30А, акки 3S на 5000мАч, винты на 11 дюймов и остальной мелочевки:
Afro ESC 30Amp Multi-rotor Motor Speed Controller (SimonK Firmware) Товар http://www.parkflyer.ru/product/988598/
ZIPPY Flightmax 5000mAh 3S1P 30C Товар http://www.parkflyer.ru/product/8587/
11 x 5 Thin Style E-Prop Black Counterclockwise Rotation (2pc) Товар http://www.parkflyer.ru/product/1182301/
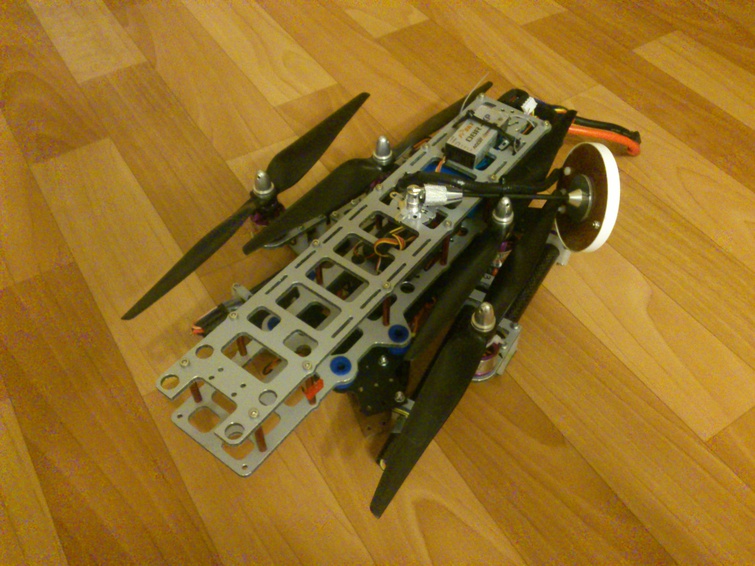
Раму изготовили на ЧПУ домашнем станке(благо брат увлекается) из алюкобонда ("бутерброд" из пластмассы и алюминия), чертежи взял понравившиеся на форуме, получился вот такой аппарат:

Тема про него на форуме: http://rc-aviation.ru/forum/topic?id=7376
Аппарат претерпел много изменений в процессе эксплуатации и стал для меня настоящей учебной партой и летающей лабораторией. Но пришел момент когда захотелось сделать более эстетичный коптер, чтобы провода не торчали во все стороны, а так же решить ряд недостатков нынешней рамы. Начал поиски рамы, очень понравилась складная из карбоновых трубок, здесь была статья про неё. И тут попалась на глаза рама QAV500 от Lumenier -http://www.lumenier.com/products/multirotors/qav500 . Рама типа H, хороша для FPV – винты в кадр лезть не будут, интересное решение с разделением «грязной» и «чистой» частей рамы, в «грязной» находиться силовая часть(регули, БП на 5в и.т.д), а в «чистой» соответственно - полетный контроллер, приемник и.т.д., к тому же между этими частями есть виброразвязка! За счёт того что тяжёлый аккум находиться в «чистой» части, получается эффективная работа виброгасящих проставок, как следствие отсутствие эффекта желе на видео и общее уменьшение вибраций на контроллер и подвес. Решил строить!
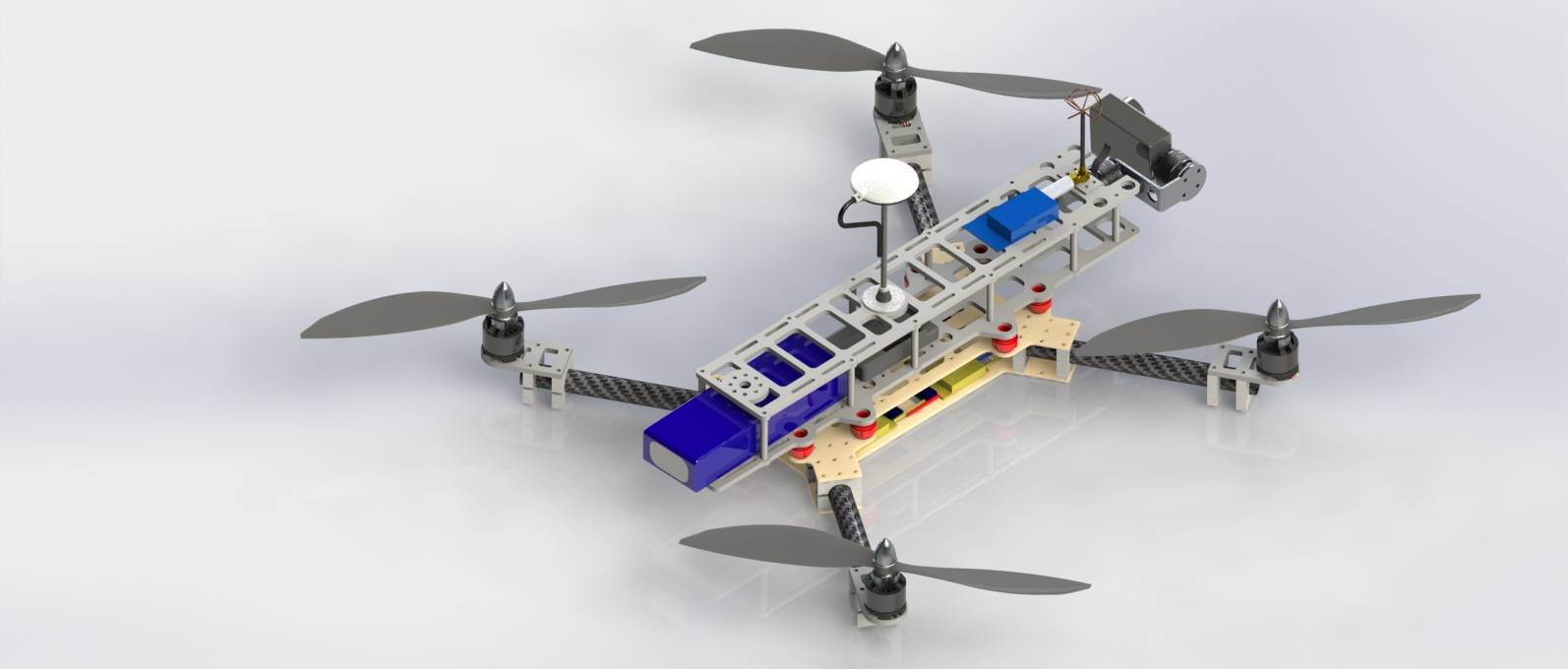
Готовых чертежей не было, поэтому раму стал разрабатывать сам в SW, опираясь на картинки оригинального QAV500, свои размеры и нужды. Получилась вот такая модель:


Для изготовления рамы были закуплены карбоновые трубки диаметром 16мм и длиной 330мм:
http://ru.aliexpress.com/item/4-Pcs-Lot-Carbon-Fiber-Tube-3K-Twill-16mm-Diameter-330mm-Long-for-Quadcopter-Multicoptor-20380/1144859556.html
А так же резиновые демпферы на 150г., применяемые для подвесов, и алюминиевые стойки:
Виброзащитные стойки (синие, 150 г на стойку), 8 шт. Товар http://www.parkflyer.ru/product/1084889/
H250 ZMR250 Frame Kit Parts CNC Aluminum Column M5x35MMxM3 Товар http://www.parkflyer.ru/product/1692474/
Для «грязной» части взял лист фольгированного текстолита, и лист обычного, для «чистой» - алюкобонд. Сделали нарезку на станке:
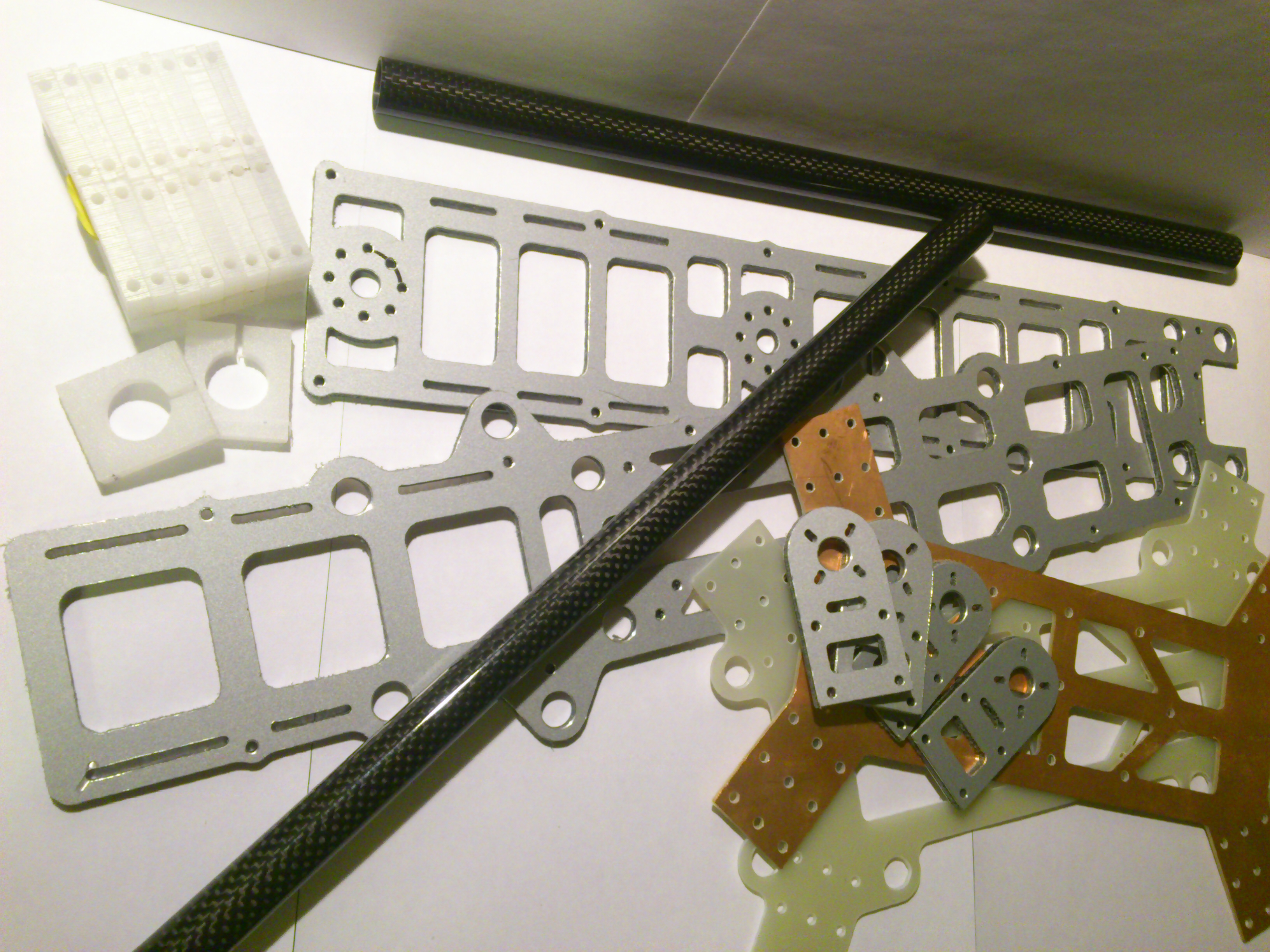
Вес: нижняя грязная - 38г. верхняя грязная - 43г. нижняя чистая - 87г. верхняя чистая - 67г. моторама - 7г.
ИТОГО - 266г. Солид ошибся всего на 5г.
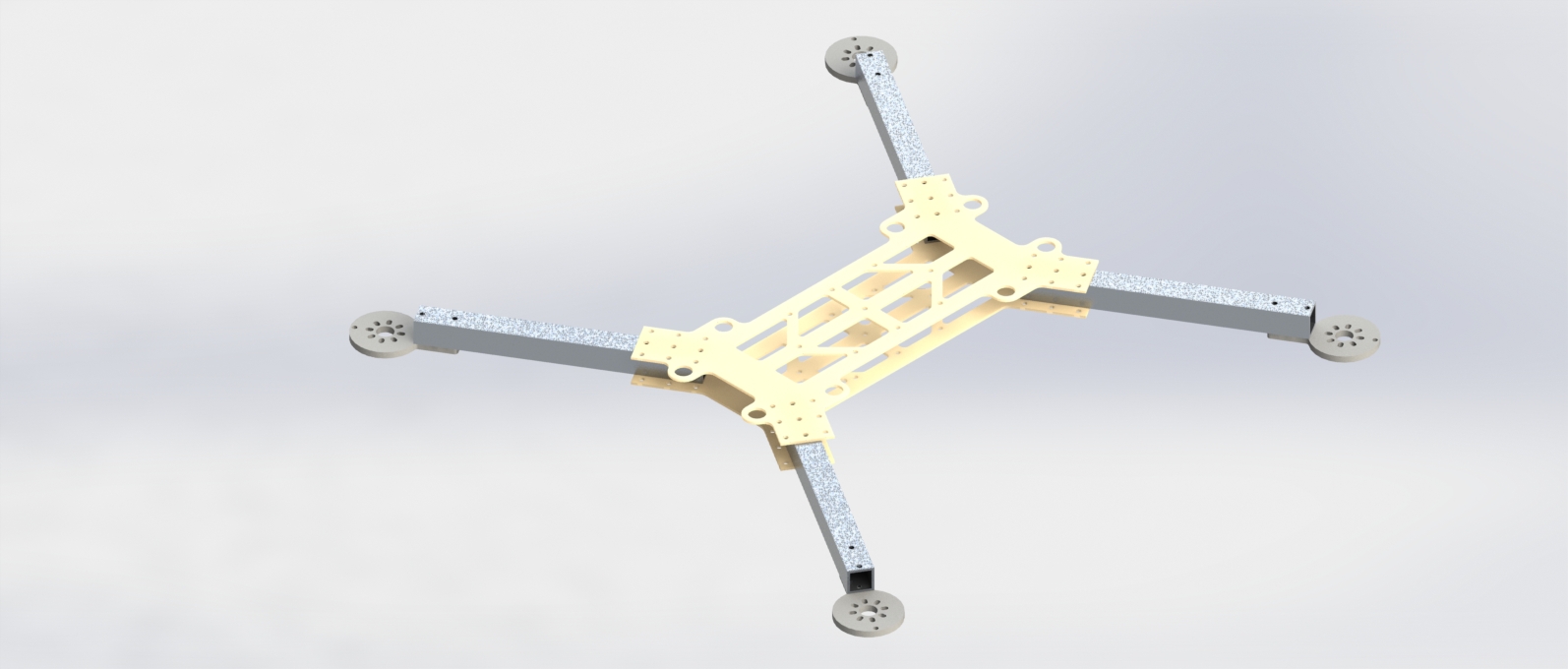
Хомуты также на станке, из пластиковой разделочной доски, затем просверлил отверстия на сверлильном станке. Кстати, дизайн рамы я разрабатывал так, что она может быть как складной, так и нет, и в место карбоновых трубок можно использовать например алюминиевый профиль. Я решил делать складной.
Вот пример модели с алюминиевыми лучами:
Сделал прикидочную сборку:
Сравнение с предшевствеником:

Затем разобрал, покрасил нужные элементы и стал потихоньку собирать, решил добавить подсветку на ЛА в виде мощных 1Вт светодиодов красного и белого цвета, работа в режиме вкл, выкл и стробоскопы, информацию по БАНО можно посмотреть здесь http://rc-aviation.ru/mtech/46-avtech/1460-bano . При сборке лучей хомуты дополнительно шплинтовал проволокой для надёжности:
Во время сборки смутила продольная жесткость «грязной» части, поэтому туда добавил стрингер:
сборка "грязной" части:
Как успел заметить внимательный читатель - механизм складывания - это хомуты-защёлки для пластиковых труб.
плотненький монтаж получается:
на фото видны регули, PM, БП для APM, плата БАНО, драйверы для светодиодов.
закрываем нижний бутерброд:
сборка чистой части:
нафаршировываем электроникой:
примерно так в сложенном виде:
Всё собирается красиво и просто, не сложнее кит-набора! Единственно немного вызвал затруднение механизм складывания, уложить провода так чтобы ничего, нигде не задевало и всё, везде вмещалось. Диагональ по итогу получилась 510мм, вес полётный с подвесом и камерой - 1800г., время полёта около 8-9мин.,
По поводу подвеса, он самодельный, рычаги из алюминия(чертежи есть в архиве), выпиливал вручную, электроника следующая:
Бесколлекторный контроллер подвеса Tarot ZYZ22 GOPRO a Gimbal Controller Товар http://www.parkflyer.ru/product/1024434/
Quanum 2208 Precision Brushless Gimbal Motor (GoPRO size 100-200g) Товар http://www.parkflyer.ru/product/1023749/
Ну и конечно фотографии с полевых испытаний и полётов:





Ссылки на чертежи прилагаю, ссылка на полный проект для SW 2014+DXF файлы, несколько фото и картинок:
https://cloud.mail.ru/public/F7Ws/CSrq2mtfH 82Мб
Для тех кто не хочет много качать, то просто файлы DXF под резку на станок, или можно просто распечатать и пилить руками, кому как нравиться!:
https://cloud.mail.ru/public/B9Bw/bQv8GX5Kn 18Кб
тема проекта тут: http://rc-aviation.ru/forum/topic?id=7837&p=2
Бонусом видео о моей реплике:
P.S. 1 июня 2015г. Борт был безвозвратно утерян, предполагаемая причина – пропало питание на APM, поиски не увенчались успехом, причина – халатность. Имеется GPS треккер.
- но зачем его цеплять к аппарату?
- Это же занимает кучу времени, включить, прикрепить, да и лишний вес ни к чему! Да я и летать то далеко не собираюсь!
Так что уважаемые авиамоделисты не повторяете чужих ошибок – всегда применяйте средства для поиска модели в случае крушения!
К этому проекту я собираюсь вернуться, но позже, с другой комплектацией и материалами, но это будет уже другая история….
P.P.S Сейчас работаю над проектом 250 миникоптера, проект тут http://rc-aviation.ru/forum/topic?id=7761
Видео:
Рама и комплектуха будут изменены, но не буду раскрывать все карты!
Всем удачных полётов!













а то скучно одному летать...
У меня последний улет был очень показательным - я забыл поставить радиомаяк на борт (хотя достал его и приготовил к полету). Коптер был найден по последним координатам (смотрел на записи с наземки). По это писал на форуме, читать отсюда и ещё страницу вперед. Я свой коптер нашел воткнутым в виде креста (просто факт, без домыслов))).
На коптере хотя-бы телефон был написан?
На будущее - вот в этой теме шло обсуждение по поиску убегашек, и самое главное - как предохраниться, чтобы его гарантированно найти.
От меня коптеры сваливали 7 раз. И большАя (не бОльшая) часть возвратов была именно по номеру телефона на борту и по объявам, расклееным в округе. Конечно, если полет был в поле/лесу - это осложняется в плане поиска. Но по-крайней мере, есть соцсети, потом объяву можно приклеить где-нибудь на подходе, в людном месте.
В последнее время пользую радиомаяк + наземная запись. Гарантированная находка потери в течении часа.
25 января 2015 года в 17:39 | Тимур Ганиев Реж
Еще есть вариант - подключить кого-нибудь из моделистов в вашей местности, поставить камеру на борт, и облететь всю подозреваемую местность. А потом запись смотреть на большом телевизоре и с замедленным показом.
или отдельные, типа этой:
Рама достойная. Я так понимаю дюбонд? Очень заинтересовал ЧПУ
Посоветую сменить винты ну очень плохие на вот такие
rctimer 2830/11 1000
винт тяга ток
11x5 thin style 900 16,65
10x5 thin style 690 12,71
10x4,7 SF 860 16,98
11x4,7 SF 980 19,59
По соотношению ток-тяга оптимальным получился 11X5 thin style, их и поставил.
А сменить уже нечего, он уже упал =)
Материал Алюкобонд, ссылка на вики - Алюкобонд , представляет из себя бутерброд из пластика между алюминиевыми тонкими пластинами, толщина 4мм.
И еще: а вы вели запись полета коптера? Иногда по записи видео удается выяснить место падения.
19 июля 2014 года в 14:17 | Никита Есенин Казань
сделал как в статье, очень понравилось! Спасибо автору! Балансировал в паре винт+ротор двигателя. Ну первое время меня моторы устраивали, но скоро уже перестали, если бы ЛА не был утерян, то думаю я уже бы поменял бы моторы на Саннискаи какие нибудь. Лучше доплатить и взять например sunnysky x2212 - Sunnysky X2212, они будут хоть нормально отбалансированы.
Запись не вёл - всё таже проклятая спешка и халатность!