Краткая предыстория и обзор готового аппарата 

Впервые идея сделать коптер родилась 2 с лишним года назад в результате выбора платформы для ни много ни мало сканирующего лазера воздушного базирования :) (10 класс, куча амбиций). Параллельно с работами над лидаром начал делать сам коптер. Тогда я не знал, что есть группы в соцсетях, посвященные данной теме, куда можно написать "как сделать коптер?", все материалы по данной теме выкапывались из интернета, рам заводских я не принимал, и делал максимум деталей сам. К тому времени, когда я понял, что если я сделаю работющий образец с дальностью метров 300, то такая работа потянет как минимум на курсовую по радиотехнике, я уже сделал одну раму из алюминиевого профиля и сэндвича алюминий+пластик, не помню название. Но коптер вышел тяжёлым, и я пересобрал его на карбоне, причём всё это оригинальной конструкции, а центральная пластина вообще была сделана мной из угля всего в 4 слоя, весила грамм 40 при размере 170х170х5, и не гнулась руками. Все крепежи фрезеровал из алюминия. Осоенно интересными получились крепежи шасси, которые я точил без чертежей, по трёхмерной моели в моей голове.  Это была третья рама на моём счету, она уже адекватно летала, на ней я получал первый опыт пилотирования. На ней же и испытывал такое подвесное устройство для сброса зондов чемпионата CanSat, о котором будет рассказано в другой статье. С этим аппаратом я побывал на многих выстках и конференциях, в Москве и других городах России. Но рама была всё же сырая, и было решено переделать ее в очередной раз. На этот раз за основу была взята рама Александра Николаева. Складная рама на трубках, об этом аппарате будет рассказано, когда я его соберу, сейчас он существует в виде горы комплектующих.
Это была третья рама на моём счету, она уже адекватно летала, на ней я получал первый опыт пилотирования. На ней же и испытывал такое подвесное устройство для сброса зондов чемпионата CanSat, о котором будет рассказано в другой статье. С этим аппаратом я побывал на многих выстках и конференциях, в Москве и других городах России. Но рама была всё же сырая, и было решено переделать ее в очередной раз. На этот раз за основу была взята рама Александра Николаева. Складная рама на трубках, об этом аппарате будет рассказано, когда я его соберу, сейчас он существует в виде горы комплектующих. 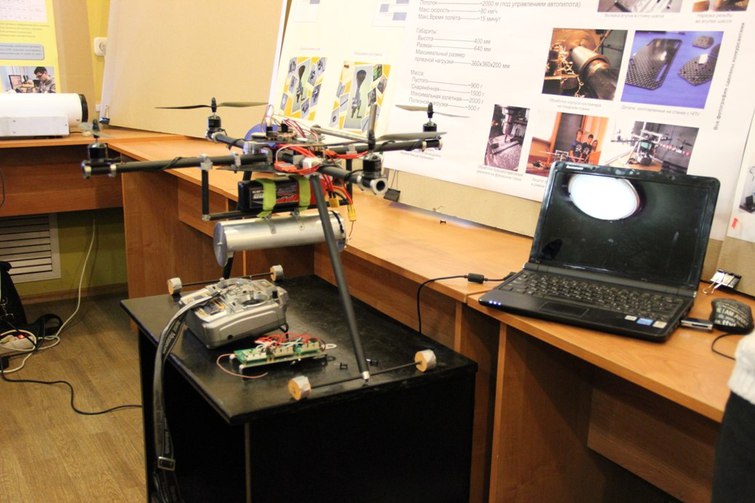 А что бы ен потерять квалификацию и даже повысить её, пока собираю большой проект, решил сделать из накопившихся деталей маленький простенький аппаратик для полётов округ себя, который не жалко шлёпнуть и легко починить. Исходя из ТЗ из имеющейся ВМГ начертил за один вечер раму, на следующий день напилил из 2мм текстолита детали, лучи из 14мм профиля а-ля Леруа. Для того, что бы не плакать, натыкаясь взглядом на страшненькую конструкцию, детали имели минимум острых углов и были покрашены из баллончика белой эмалью.
А что бы ен потерять квалификацию и даже повысить её, пока собираю большой проект, решил сделать из накопившихся деталей маленький простенький аппаратик для полётов округ себя, который не жалко шлёпнуть и легко починить. Исходя из ТЗ из имеющейся ВМГ начертил за один вечер раму, на следующий день напилил из 2мм текстолита детали, лучи из 14мм профиля а-ля Леруа. Для того, что бы не плакать, натыкаясь взглядом на страшненькую конструкцию, детали имели минимум острых углов и были покрашены из баллончика белой эмалью.
 Далее была спаяна вся проводка
Далее была спаяна вся проводка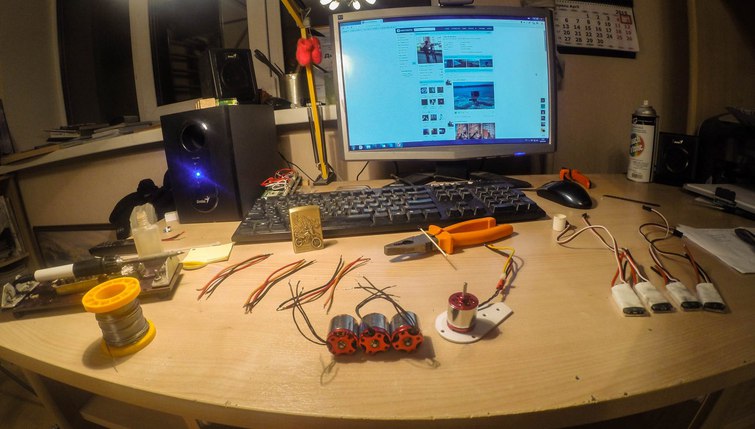
Вся силовая часть разместилась между пластинами, влезло очень плотно.
В итоге получился такой вот аппарат:



 Управляет этой мясорубкой контроллер Multiwii Pro, установленный на демпфере из поролонообразного материала, и защищён сверху завинчивающимся контейнером из Ашана, который ещё и служит креплением для GoPro. Хотя коптер и не планировался как ностиель камеры, я решил поэксперементировать. Причём изначально камера стояла сверху,
Управляет этой мясорубкой контроллер Multiwii Pro, установленный на демпфере из поролонообразного материала, и защищён сверху завинчивающимся контейнером из Ашана, который ещё и служит креплением для GoPro. Хотя коптер и не планировался как ностиель камеры, я решил поэксперементировать. Причём изначально камера стояла сверху, и винты попадали в кадр. Поломав немного голову, я приладил штангу со своего шлема. на которой камера оказалась вынесеной ниже плоскости рамы, и винтов в кадре теперь нет.
и винты попадали в кадр. Поломав немного голову, я приладил штангу со своего шлема. на которой камера оказалась вынесеной ниже плоскости рамы, и винтов в кадре теперь нет.

Летает стабильно минут 15 без камеры, но видео с жёстко закреплённой камеры сами знаете какое... Поэтому снимаю больше всего фото. Вот несколько примеров.
В этом видео есть кадры с борта аппарата
На этом фото можно заметить 2х метровое летающее крыло SkyWalker





 Так же хочется отметить живучесть аппарата. Во время съёмки (крайний кадр), предположительно из за перегрева ESC (сильный ветер+камера) коптер шмякнулся с 20и метров на газон. Из всех повреждений только отделившийся двигатель (оторвались провода идущие к обмоткам).
Так же хочется отметить живучесть аппарата. Во время съёмки (крайний кадр), предположительно из за перегрева ESC (сильный ветер+камера) коптер шмякнулся с 20и метров на газон. Из всех повреждений только отделившийся двигатель (оторвались провода идущие к обмоткам). 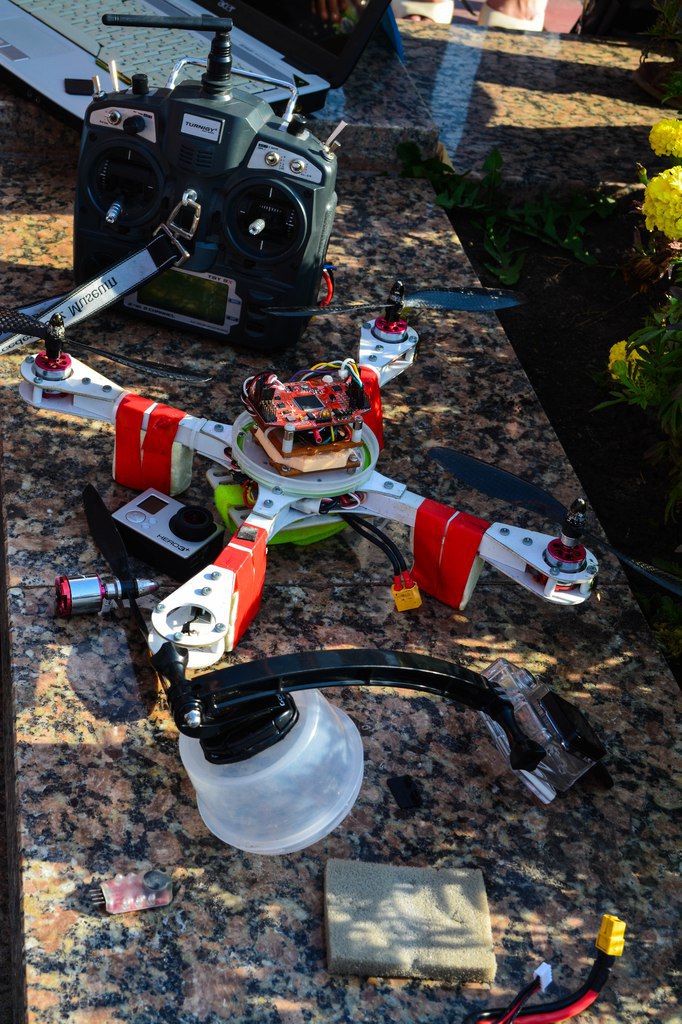 Рама полностью цела, и, что самое удивительное, целы все винты. Они и раньше удивляли меня: однажды, зарулившись, плюхнул аппарат в поле, подхожу, а от стоит на боку-2 лопасти вошли почти по самую ось в землю. Летает это чудо на 3S 5Ah. Регули ноу нейм, моторы ADHL-300L 1100 KV
Рама полностью цела, и, что самое удивительное, целы все винты. Они и раньше удивляли меня: однажды, зарулившись, плюхнул аппарат в поле, подхожу, а от стоит на боку-2 лопасти вошли почти по самую ось в землю. Летает это чудо на 3S 5Ah. Регули ноу нейм, моторы ADHL-300L 1100 KV
СCтатья не претендует на подробности, это скорее взгляд со стороны
С уважением, Алексей, 18 лет.
 Это была третья рама на моём счету, она уже адекватно летала, на ней я получал первый опыт пилотирования. На ней же и испытывал такое подвесное устройство для сброса зондов чемпионата CanSat, о котором будет рассказано в другой статье. С этим аппаратом я побывал на многих выстках и конференциях, в Москве и других городах России. Но рама была всё же сырая, и было решено переделать ее в очередной раз. На этот раз за основу была взята рама Александра Николаева. Складная рама на трубках, об этом аппарате будет рассказано, когда я его соберу, сейчас он существует в виде горы комплектующих.
Это была третья рама на моём счету, она уже адекватно летала, на ней я получал первый опыт пилотирования. На ней же и испытывал такое подвесное устройство для сброса зондов чемпионата CanSat, о котором будет рассказано в другой статье. С этим аппаратом я побывал на многих выстках и конференциях, в Москве и других городах России. Но рама была всё же сырая, и было решено переделать ее в очередной раз. На этот раз за основу была взята рама Александра Николаева. Складная рама на трубках, об этом аппарате будет рассказано, когда я его соберу, сейчас он существует в виде горы комплектующих. 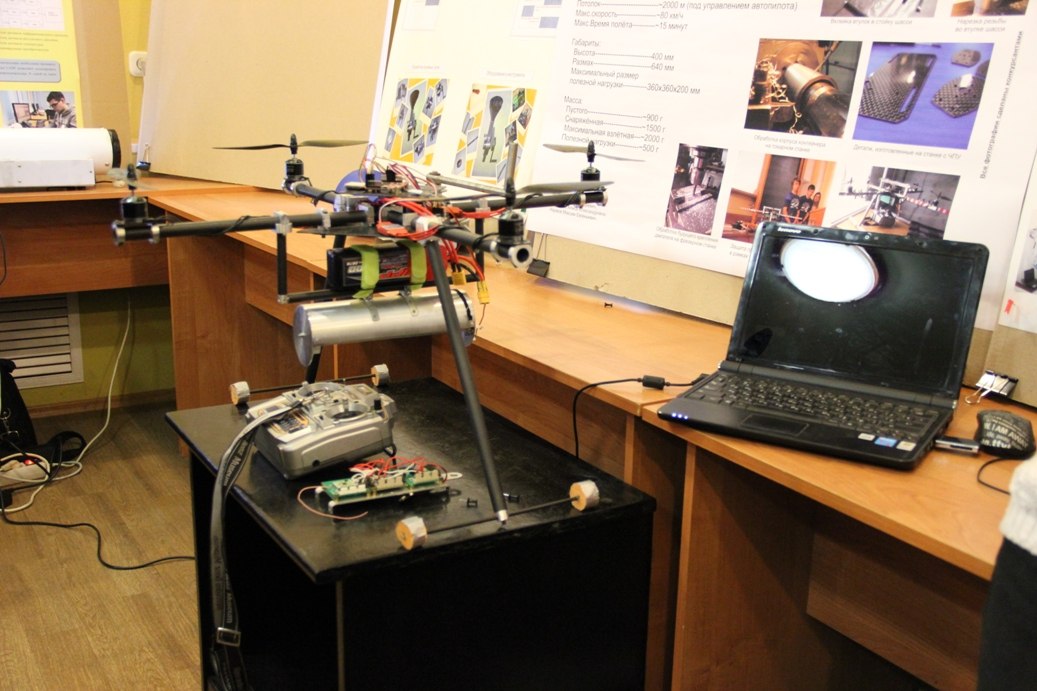 А что бы ен потерять квалификацию и даже повысить её, пока собираю большой проект, решил сделать из накопившихся деталей маленький простенький аппаратик для полётов округ себя, который не жалко шлёпнуть и легко починить. Исходя из ТЗ из имеющейся ВМГ начертил за один вечер раму, на следующий день напилил из 2мм текстолита детали, лучи из 14мм профиля а-ля Леруа. Для того, что бы не плакать, натыкаясь взглядом на страшненькую конструкцию, детали имели минимум острых углов и были покрашены из баллончика белой эмалью.
А что бы ен потерять квалификацию и даже повысить её, пока собираю большой проект, решил сделать из накопившихся деталей маленький простенький аппаратик для полётов округ себя, который не жалко шлёпнуть и легко починить. Исходя из ТЗ из имеющейся ВМГ начертил за один вечер раму, на следующий день напилил из 2мм текстолита детали, лучи из 14мм профиля а-ля Леруа. Для того, что бы не плакать, натыкаясь взглядом на страшненькую конструкцию, детали имели минимум острых углов и были покрашены из баллончика белой эмалью.
 Далее была спаяна вся проводка
Далее была спаяна вся проводка
Вся силовая часть разместилась между пластинами, влезло очень плотно.
В итоге получился такой вот аппарат:




 Управляет этой мясорубкой контроллер Multiwii Pro, установленный на демпфере из поролонообразного материала, и защищён сверху завинчивающимся контейнером из Ашана, который ещё и служит креплением для GoPro. Хотя коптер и не планировался как ностиель камеры, я решил поэксперементировать. Причём изначально камера стояла сверху,
Управляет этой мясорубкой контроллер Multiwii Pro, установленный на демпфере из поролонообразного материала, и защищён сверху завинчивающимся контейнером из Ашана, который ещё и служит креплением для GoPro. Хотя коптер и не планировался как ностиель камеры, я решил поэксперементировать. Причём изначально камера стояла сверху, и винты попадали в кадр. Поломав немного голову, я приладил штангу со своего шлема. на которой камера оказалась вынесеной ниже плоскости рамы, и винтов в кадре теперь нет.
и винты попадали в кадр. Поломав немного голову, я приладил штангу со своего шлема. на которой камера оказалась вынесеной ниже плоскости рамы, и винтов в кадре теперь нет.
Летает стабильно минут 15 без камеры, но видео с жёстко закреплённой камеры сами знаете какое... Поэтому снимаю больше всего фото. Вот несколько примеров.
В этом видео есть кадры с борта аппарата
На этом фото можно заметить 2х метровое летающее крыло SkyWalker






 Так же хочется отметить живучесть аппарата. Во время съёмки (крайний кадр), предположительно из за перегрева ESC (сильный ветер+камера) коптер шмякнулся с 20и метров на газон. Из всех повреждений только отделившийся двигатель (оторвались провода идущие к обмоткам).
Так же хочется отметить живучесть аппарата. Во время съёмки (крайний кадр), предположительно из за перегрева ESC (сильный ветер+камера) коптер шмякнулся с 20и метров на газон. Из всех повреждений только отделившийся двигатель (оторвались провода идущие к обмоткам).  Рама полностью цела, и, что самое удивительное, целы все винты. Они и раньше удивляли меня: однажды, зарулившись, плюхнул аппарат в поле, подхожу, а от стоит на боку-2 лопасти вошли почти по самую ось в землю. Летает это чудо на 3S 5Ah. Регули ноу нейм, моторы ADHL-300L 1100 KV
Рама полностью цела, и, что самое удивительное, целы все винты. Они и раньше удивляли меня: однажды, зарулившись, плюхнул аппарат в поле, подхожу, а от стоит на боку-2 лопасти вошли почти по самую ось в землю. Летает это чудо на 3S 5Ah. Регули ноу нейм, моторы ADHL-300L 1100 KVСCтатья не претендует на подробности, это скорее взгляд со стороны
С уважением, Алексей, 18 лет.













Конструкция подиумов под моторы на мой взгляд громоздкая. Где-то пробегала статья, там автор крепит движки проще - прямо к профилю двумя длинными болтами-стяжками, плюс штатная крестовина мотора с изнанки. Может стОит поэкспериментировать?
Пластиковый контейнер и красный скотч - конечно понимаю, кризис в стране, но все-таки...
Пробовал ставить штатные, не понравилось - уже стереотип какой-то. Сейчас на гексе тоже нет шасси. Ловлю в руку.