Я долгое время увлекался самолетами. Решил собрать квадрокоптер, ознакомился со статьями на тему "первый вкадрокоптер", "квадрокоптер азы" и т.п. Заказал железа, собираю и понимаю, что не все так идеально я подобрал, в связи чем и появляется вопрос, а будет ли он нормально, устойчиво летать или вобще летать.
Железо следующее:
Рама: Рама для квадрокоптера Q450 V3 450mm: стекловолоконо, встроенные PCB-коннекторы - квадрат
Двигатели: БК мотор для мультикоптеров AX-2810Q 750Об\в - низкие обороты привлекли
Регули: Регулятор для многороторных систем Turnigy Multistar 30A V2, BLHeli, OPTO 2-6S, узкий
Пропеллер: Пропеллеры 12x4,5 SF (цвет чёрный) 2шт. стандартного вращения / 2шт. обратного вращения.
В качестве мозга будет APM, плата разводки питания самодельная и в будущем (когда нормально полетит) к АПМу будет довешано ФПВ барахло, передатчик, осд, гпс, power module для АПМ.
Вопрос по винтомоторной группе: рама 450 мм, зазор между кромками винтов получается 0.5-1 см (это влияет на что либо?). Из аккумуляторов в наличии есть только 3S. Во первых я вижу в нете, что винты 12 дюймов ставят на рамы по больше. Во вторых пишут, что заявленная мощность этих двигателей (чтоб жрали 35 ампер) достигается на 4S с винтами 12" и 13".
Он устойчиво будет себя чувствовать на раме 450мм, винтом 12", батареей 3S и с минимальным зазором между винтами?
Комментарии пропали, но аппарат полетел и даже не плохо. Далее "отчет" что же вышло (собран коптер "на скорую руку - лижбы полетел")

Железо следующее:
Рама: Рама для квадрокоптера Q450 V3 450mm: стекловолоконо, встроенные PCB-коннекторы - квадрат
Двигатели: БК мотор для мультикоптеров AX-2810Q 750Об\в - низкие обороты привлекли
Регули: Регулятор для многороторных систем Turnigy Multistar 30A V2, BLHeli, OPTO 2-6S, узкий
Пропеллер: Пропеллеры 12x4,5 SF (цвет чёрный) 2шт. стандартного вращения / 2шт. обратного вращения.
В качестве мозга будет APM, плата разводки питания самодельная и в будущем (когда нормально полетит) к АПМу будет довешано ФПВ барахло, передатчик, осд, гпс, power module для АПМ.
Вопрос по винтомоторной группе: рама 450 мм, зазор между кромками винтов получается 0.5-1 см (это влияет на что либо?). Из аккумуляторов в наличии есть только 3S. Во первых я вижу в нете, что винты 12 дюймов ставят на рамы по больше. Во вторых пишут, что заявленная мощность этих двигателей (чтоб жрали 35 ампер) достигается на 4S с винтами 12" и 13".
Он устойчиво будет себя чувствовать на раме 450мм, винтом 12", батареей 3S и с минимальным зазором между винтами?
Комментарии пропали, но аппарат полетел и даже не плохо. Далее "отчет" что же вышло (собран коптер "на скорую руку - лижбы полетел")
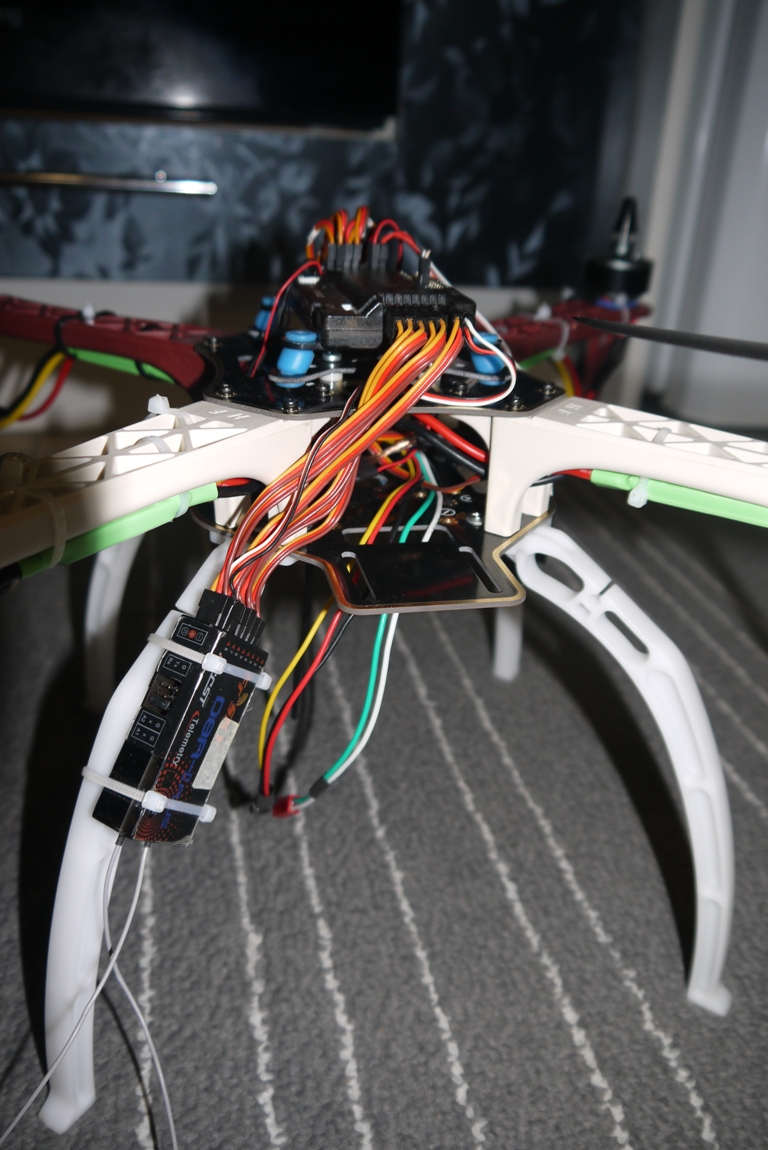
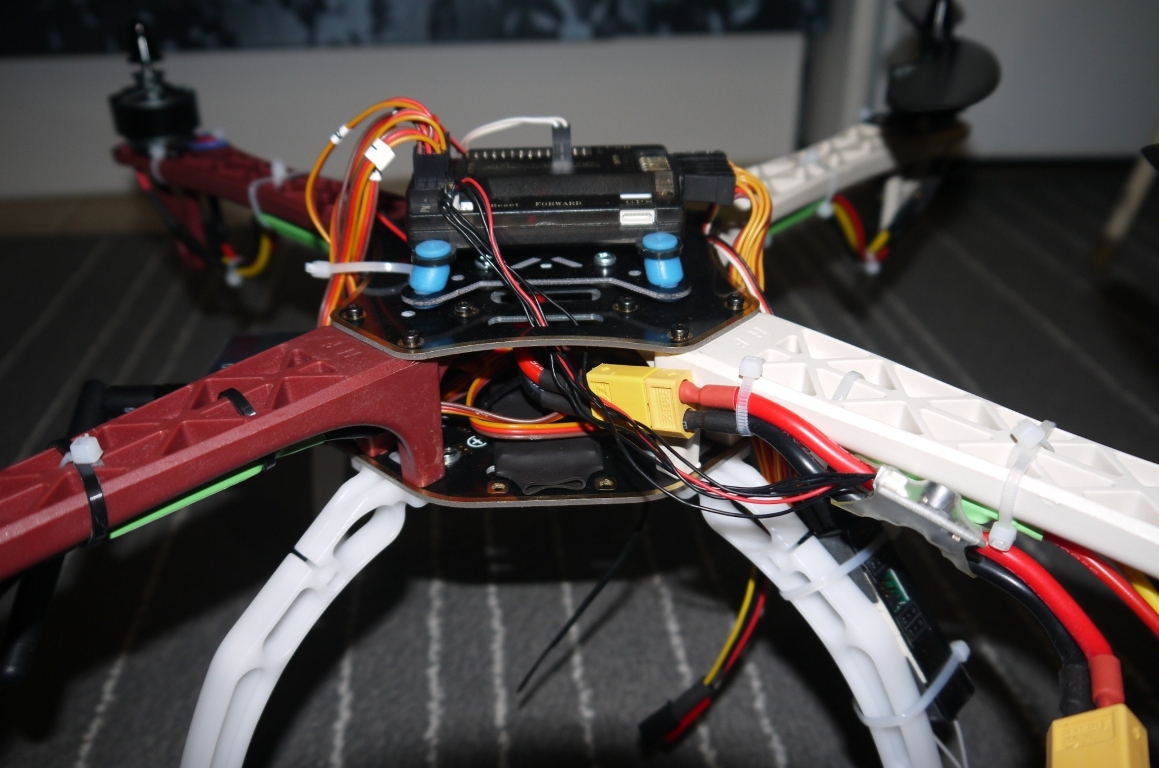
Большие пропеллеры на маленькой раме не играют ни какого значения, не цепляются за провода и ладно.
UBEC сделан из мертвого ESC
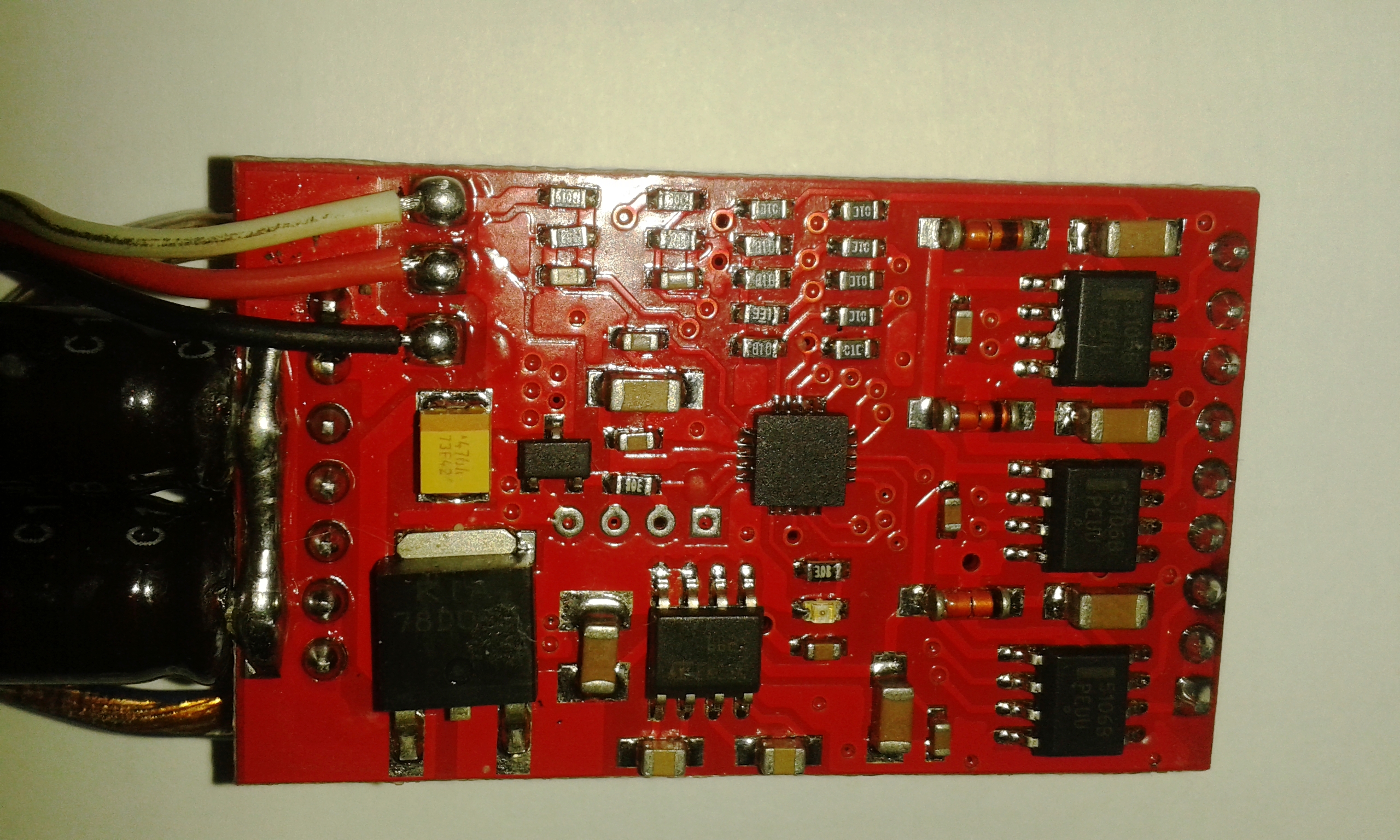
На плате микросхемки 7805 3 штуки, подключены параллельно.
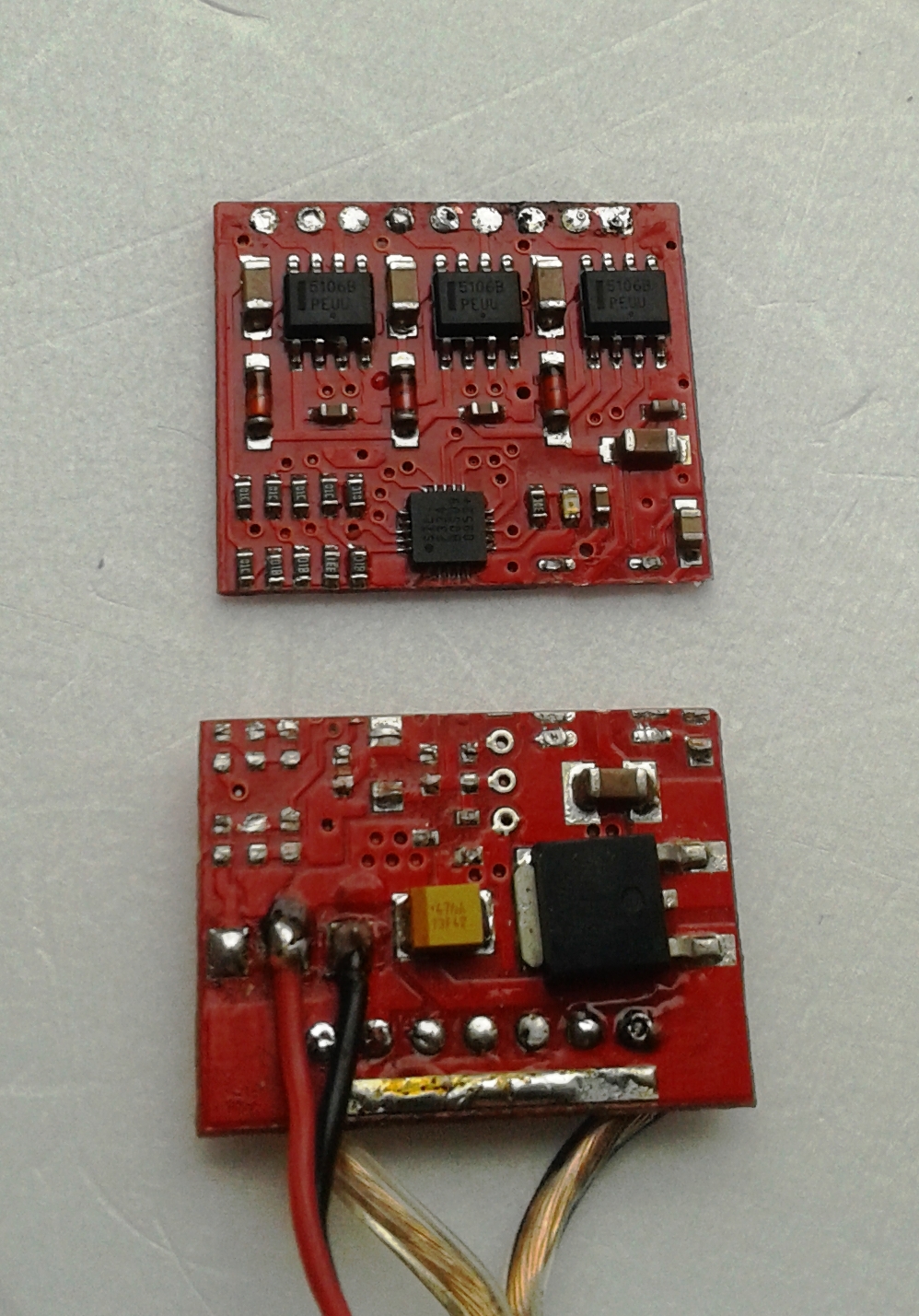
Выдернул все ненужные детали и отпилил кусок платы.
На входе питания впаял конденсатор на 470 мкф.
На АПМ залил прошивку квадрокоптера, сделал все этапы калибровки (пропустил ARM check компаса, т.к. он у меня не работает).
Первый запуск был без результатный, газ добавляешь, его ведет куда нибудь, на управление отзывается неадекватно. Включил держа в руке, над головой и выяснилось, что стик "вперед-назад" требует инверта на пульте. Почитал, посмотрел, так и оказалось, на официальном сайте APM так и сказано "включите инверт по pitch".
Это первый полет:
Результаты "полноценного полета" такие:
Вес 980 гр без батареи, GPS модуля, подвесов, камер и т.д.
Нагрузка - Аккумуляторы 2.2А 3s и 1.6А 3s параллельно (180 гр + 130 гр). Камера SJ5000 65 гр, крепление камеры и антивибрационная "приблуда" где-то грамм 50 точно будут. Передатчик видео (5.8) с антенной 40 гр. Пропеллеры так же 12х4.5. ГПС нет, ОСД нет. (общий вес около 1500 гр)
Взлетает на 50%. На аккумах 2.2+1.6А составило 10 минут "смешанного полета": зависание, медленный полет и быстрый.
После 30 минут полета "разрушительная вибрация" раскрутила практически все винты крепления рамы. Поэтому все соединения на болтах были залиты клеем позже.
Как выяснилось, мне еще потребуется много часов провести в симуляторе.













Есть несколько проектов в этих направлениях.
Моя электронная почта: a@andreyvoronkov.com
ЛЮБОЙ контроллер имеет свои особенности, и любой коптер нужно настраивать. А АРМ за свои деньги - отличный контроллер. Каждой задаче своё решение. Имею АРМ, АИОП, Назу, CC3D.
Минус за коммент не мой, но я его оставил.