
1) Конечно же я начал с самого простого: я сделал виброжука), но это было так давно, что фотографию я потерял, поэтому поставлю эту:

2) После постройки виброжука мне захотелось сделать что-нибудь посерьезнее, поинтереснее и посложнее. В выборе о постойке робота мне помог вот этот сайт: http://www.servodroid.ru/
Сначала я хотел сделать вот такого робота:

Но я был ограничен в ресурсах. Все простенькие роботы основанны на специальном импортном микроконтроллере L293D (драйвер двигателей), а также я не мог нигде найти фототранзисторы. После долгих поисков решения этой проблемы я наткнулся на вот это: http://www.servodroid.ru/news/2009-08-19-46
Процитирую:
Простой робот без МС. Начинающие роботостроители часто сталкиваются с такой проблемой, как покупка микросхем, отсутствие средств, и различных деталей. В некоторых городах, как например в моем, нет магазинов электроники, и приходится ездить в соседний город за деталями на расстояние 520 км. Поэтому предлагаю вам, начинающим, сделать такого робота.
Этот робот при соответствующей настройке и комплектации может следующее: отслеживать линию, двигаться на свет или от света. Причём каждая функция зависит от физического расположения фотодатчиков.
Если фотодатчики (фототранзисторы или фотодиоды) располагают ориентируя вперёд, то робот будет бегать за источником света или избегать его. Если пара фотодатчиков и светодиодов подсветки ориентируется вниз, перпендикулярно конструкции робота, то робот способен бегать по линии. 
Ну сначала я стал искать радиодетали.
Потом я понял принцип работы и стал разбиратся как это паять.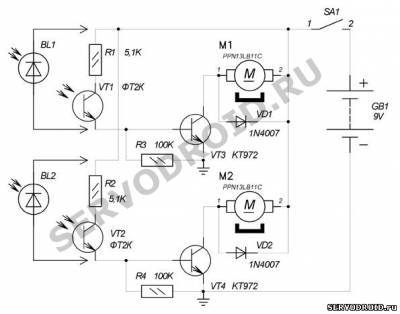
В итоге после долгих поисков и путаниц получилось вот это: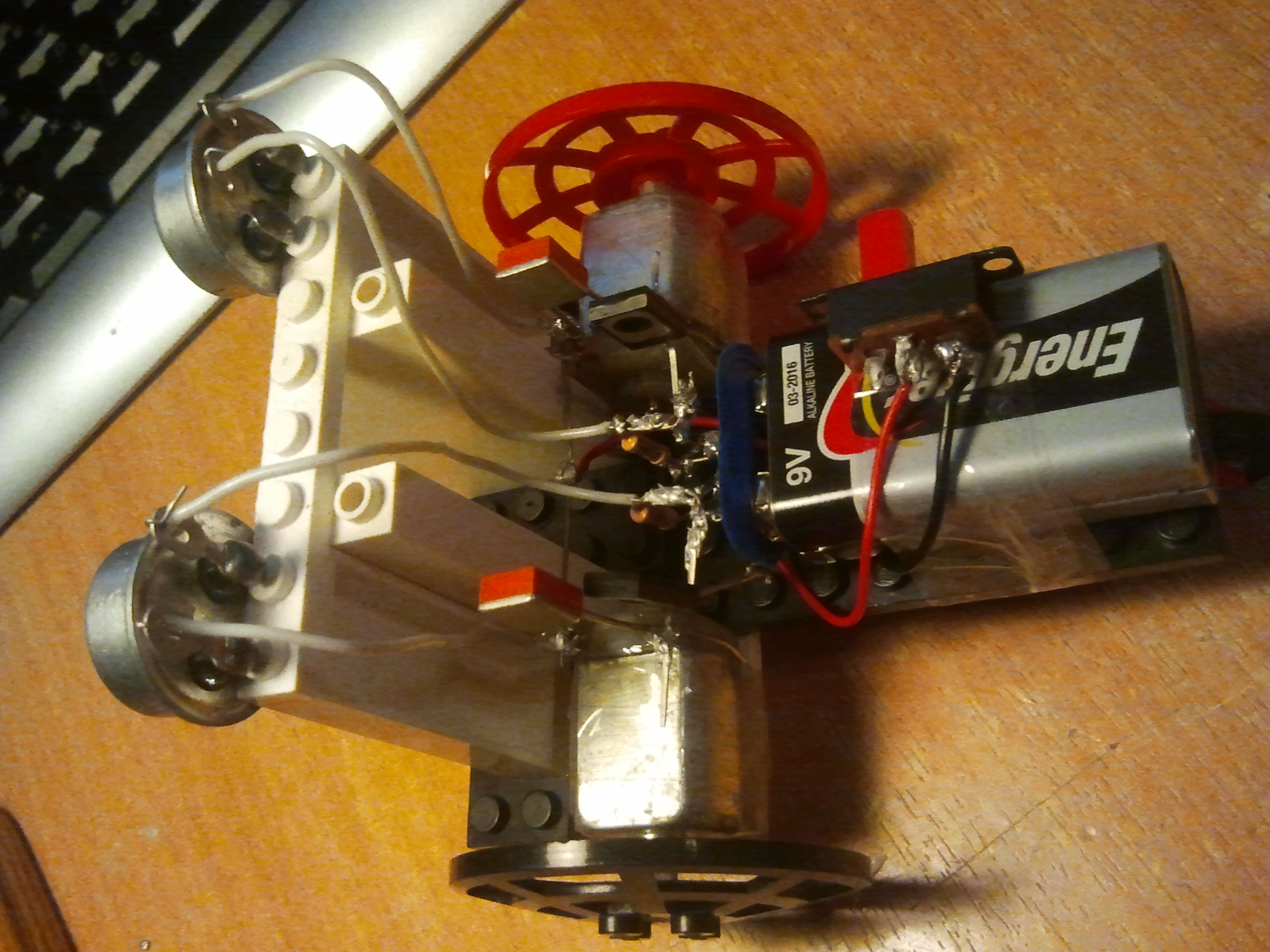
Скажу честно это работало!!! Но плохо, т.к. я использовал фоторезисторы, взял слабую батарейку и двигатели закрепил напрямую без редукторов! Ну вообщем я решил сделать нового робота.
3) Цитирую:
РетроБот -это робот, в котором установлены самодельные фототранзисторы. Ретробот предельно прост и способен бегать за источником света. Простота конструкции, малое количество деталей, а также уверенная работоспособность с фототранзисторами изготовленными по нашим рекомендациям делает его легко повторяемым в домашних условиях.
В качестве источника питания установлена всего одна батарейка типоразмера "AA" напряжением 1,5 вольта. Схемотехническое решение допускает увеличение напряжения до 3-4,5 вольта, что приведёт к увеличению скорости передвижения по поверхности.
Описание по изготовлению фототранзисторов можно найти на нашем сайте, для этого перейдите по ссылке здесь: http://www.servodroid.ru/news/samodelnyj_fototranzitor/2011-10-05-388
Ну вообщем я опять стал искать радио детали:
Разобрался с принципом схемы и приступил к созданию платы. Распечатал себе вот это: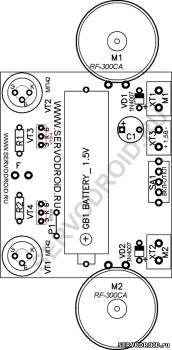
Вырезал стеклотекстолит, приложил эту распечатку, отметил дырки для компонентов, просверлил их. Потом купил лаковый маркер, нарисовал дорожки и поставил сушится. Дальше я сделал раствор хлорида железа и положил в него плату на 2-3 часа. Потом я вынул плату и на месте лака остались дорожки, лак надо будет смыть ацетоном, а потом пролудить паяльником все дорожки.
Вот что получилось в итоге:
Работал робот с переменным успехом, как будто в него вселилась душа, и он то хотел работать, то нет... И поэтому я решил создать более правильного, усовершенствованного робота, исправить все свои ошибки.
4) Схему платы я выбрал такую же как у второго моего робота. С вытравление платы я решил не парится, а просто на плотном картоне вырезал дырки для компонентов и просто спаял.

Вместо фоторезисторов я использовал фотодиоды, т.к. они лучше подходят для схемы и болле чуствительны.
НУ и итоге вот что получил:
Есть также еще хитрость: специально я из лега сделал перегородку, чтобы система лучше работала.
Вот видео работы его:
Но я не остановился на этом. Я захотел сделать вещь еще более интреснее.
5) Роборука
Вот по примеру этого видео я захотел сделать роборуку:
Решил сделать из страго и любимого лега=) Но пожелел вскоре об этом. я соорудил конструкцию; она предпологала использование 6 движений (6 редукторов). самый можный и сильный редуктор я поставил на самый тяжелый участок: плечевой сустав: ( тогда я не знал что такое сервоприводы и поэтому мучался с редукторами)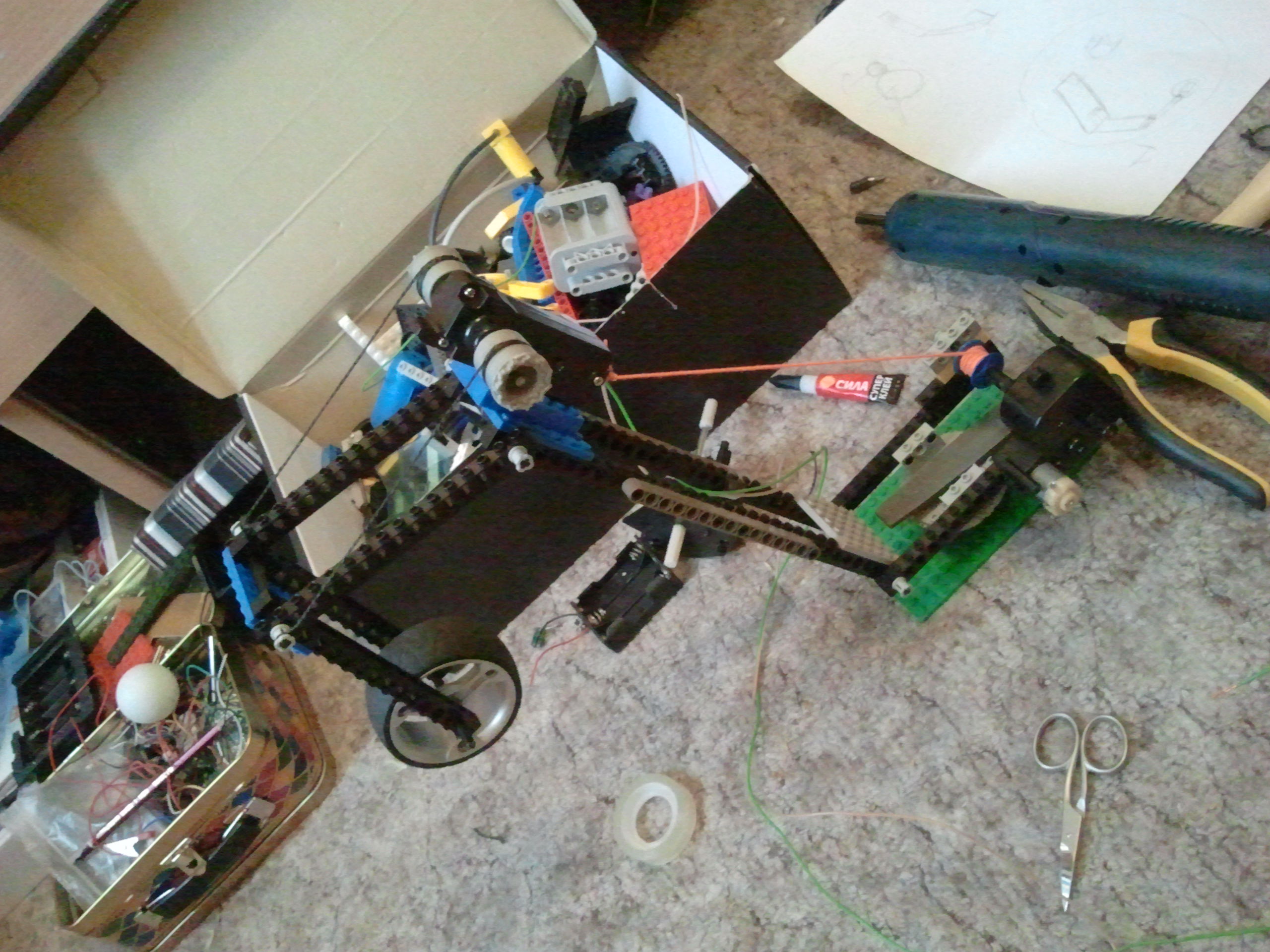

Вскоре я узнал о существование сервоприводов, но уже было позно. Я взял серву, вытачил плату и просто припоял два провода к моторчику.
Теперь я задумался как теперь я буду управлять этой штукой. Было много идей:
1) использовать 8-канальную аппаратуру, но тогда нужно было бы все редукторы поменять на сервы.
2) сделать блок с 6-ю переключателеми типа On-Off-On, чтобы можно было управлять двигателем в разные стороны, но я не нашел таких
3) использовать плату Arduino и научится писать программы на специальном языке программирования, но из отсутсвия, наверно, желания я не смог это осуществить...
Робототехника- дело настоящего будущего. Уже совсем давно роботы приносят человеку пользу; их стали использовать практически везде: на заводах, в офисах, в военном деле и даже дома. И поэтому я считаю, что робототехника это беззусловно наше будущее. Но увы я бросил её, т.к. мое сердце покорили авто и авиа моделизм. И в будущем я вам смогу рассказать о истории моего пути в этих направлениях.













По поводу робота на транзисторах - вы точно такую же ошибку сделали как я, когда был начинающим =] робототехником. На моторы не нужно устанавливать колесо, превышающее его размеры. Нужно вообще без колес обходиться, - для этого на валы моторов надеваем кембрики (термоусадочные трубки) и моторы ставим под углом чтобы робот на валы мотора опирался. С таким вариантом робот шустрый будет.
С уважением,
Администратор SERVODROID.RU