Всем доброго времени суток! Хочу вам рассказать о том, как я строил свой первый квадрокоптер, в каком он сейчас состоянии и мои дальнейшие планы на него.


Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев.
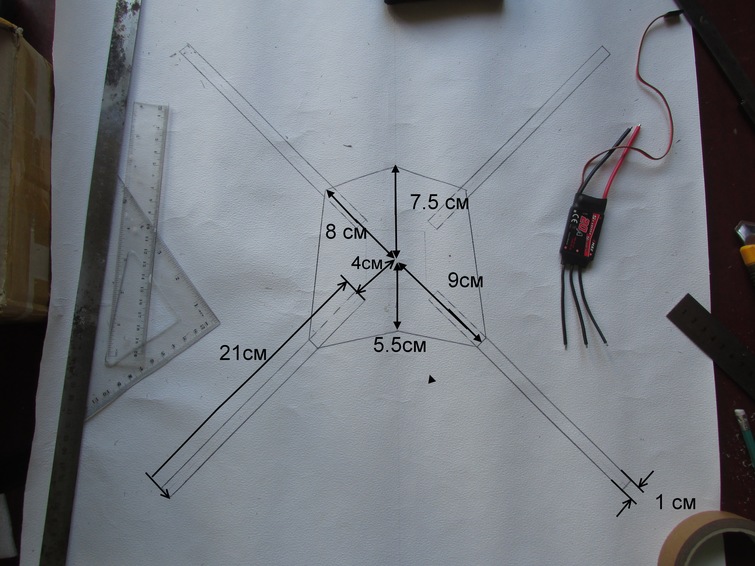
Кстати, размер выбрал 45 - универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю.
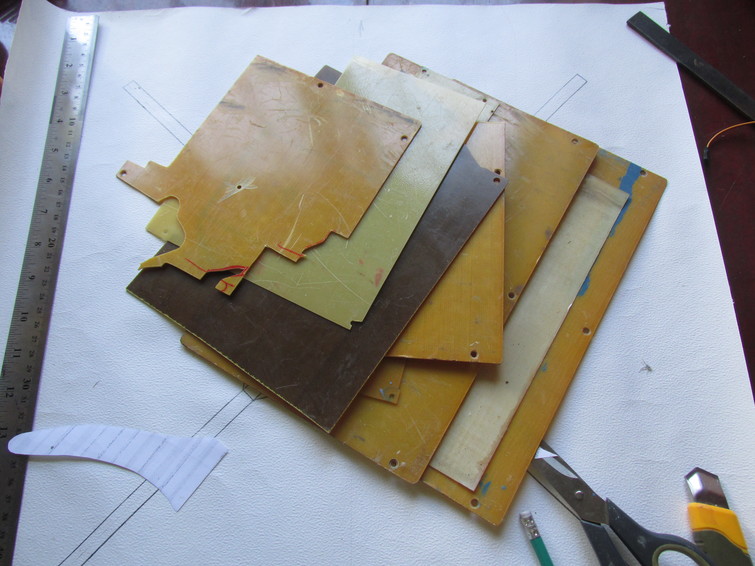
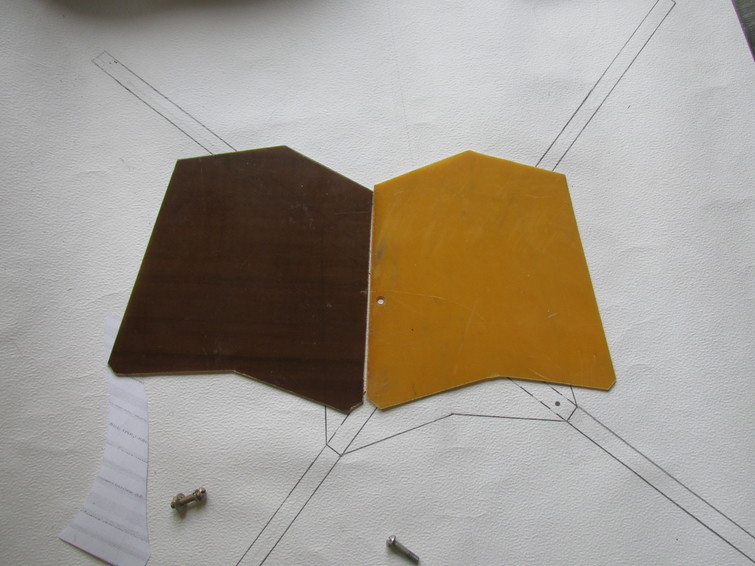
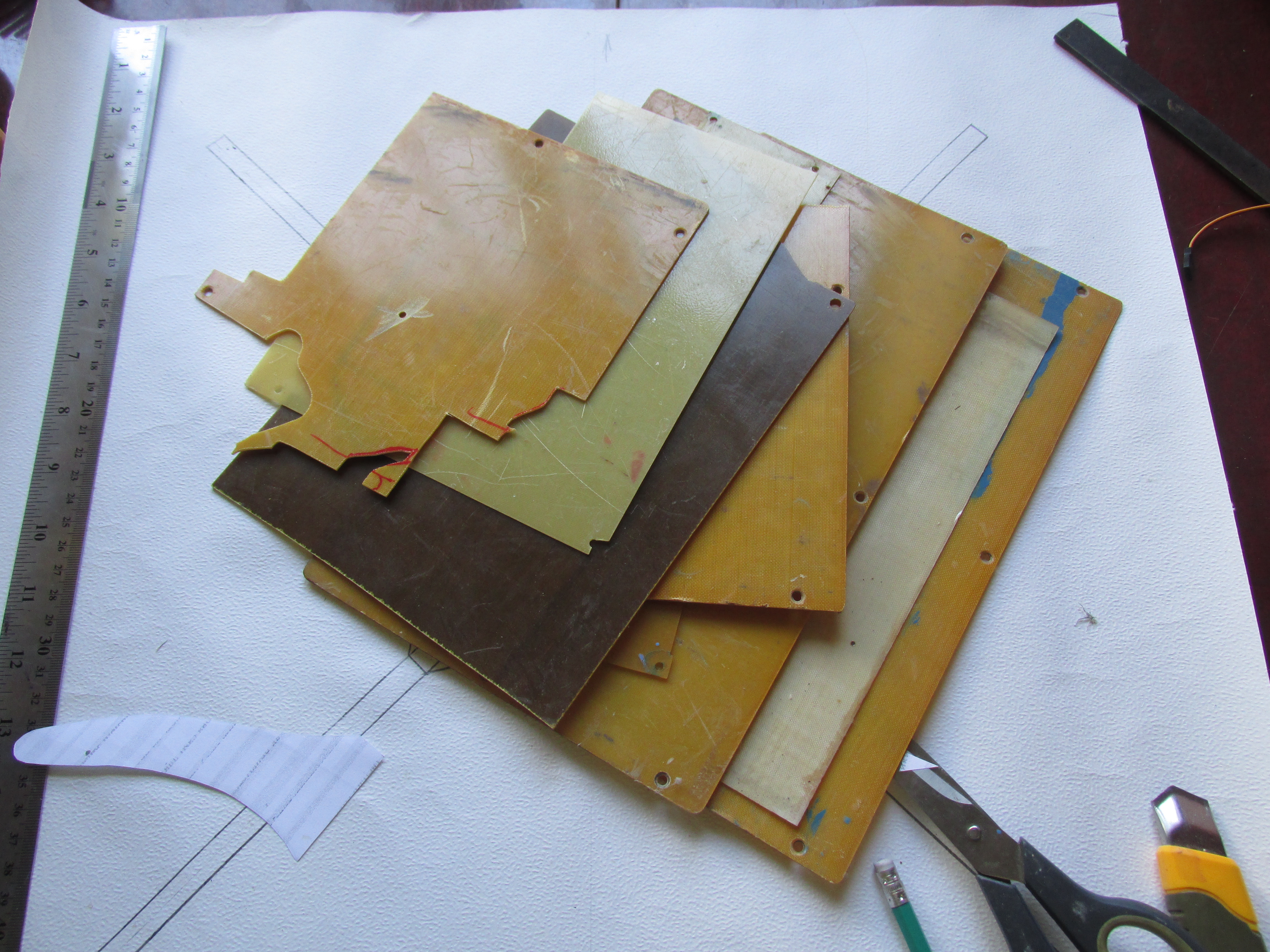
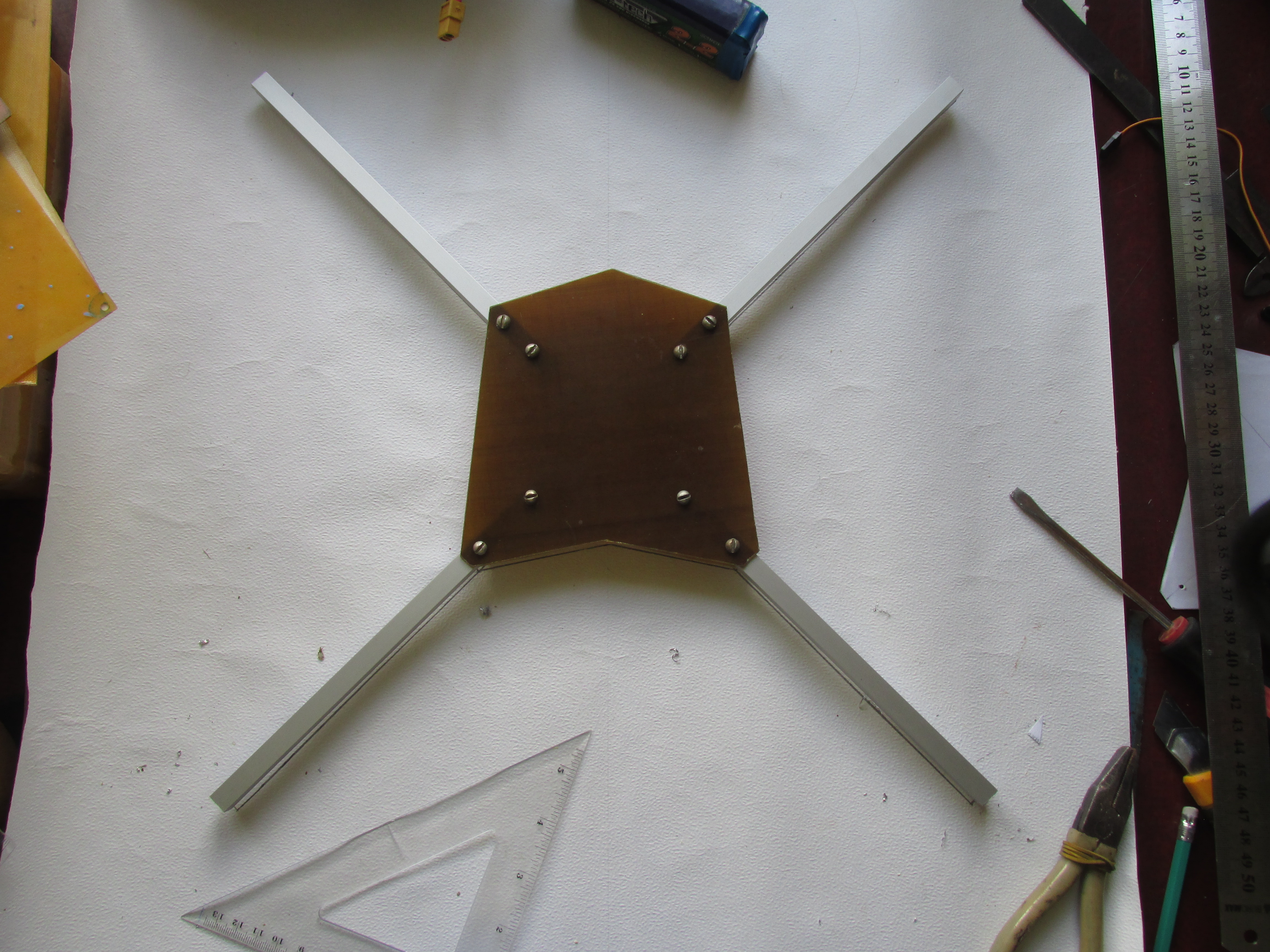
Собрав дома весь стеклотекстолит, приступил к выпиливанию двух одинаковых основ, между которыми будут зажаты лучи.
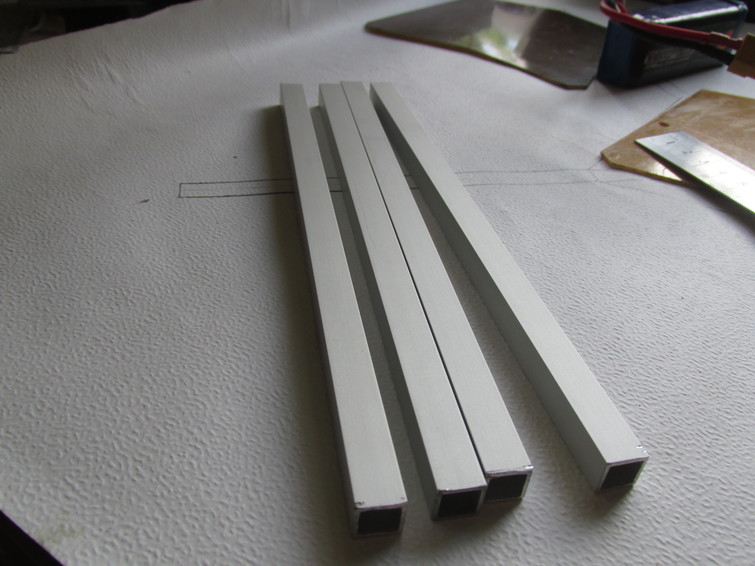
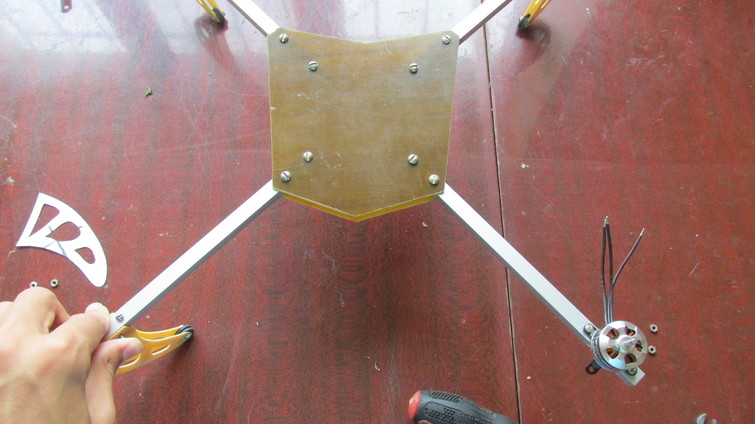
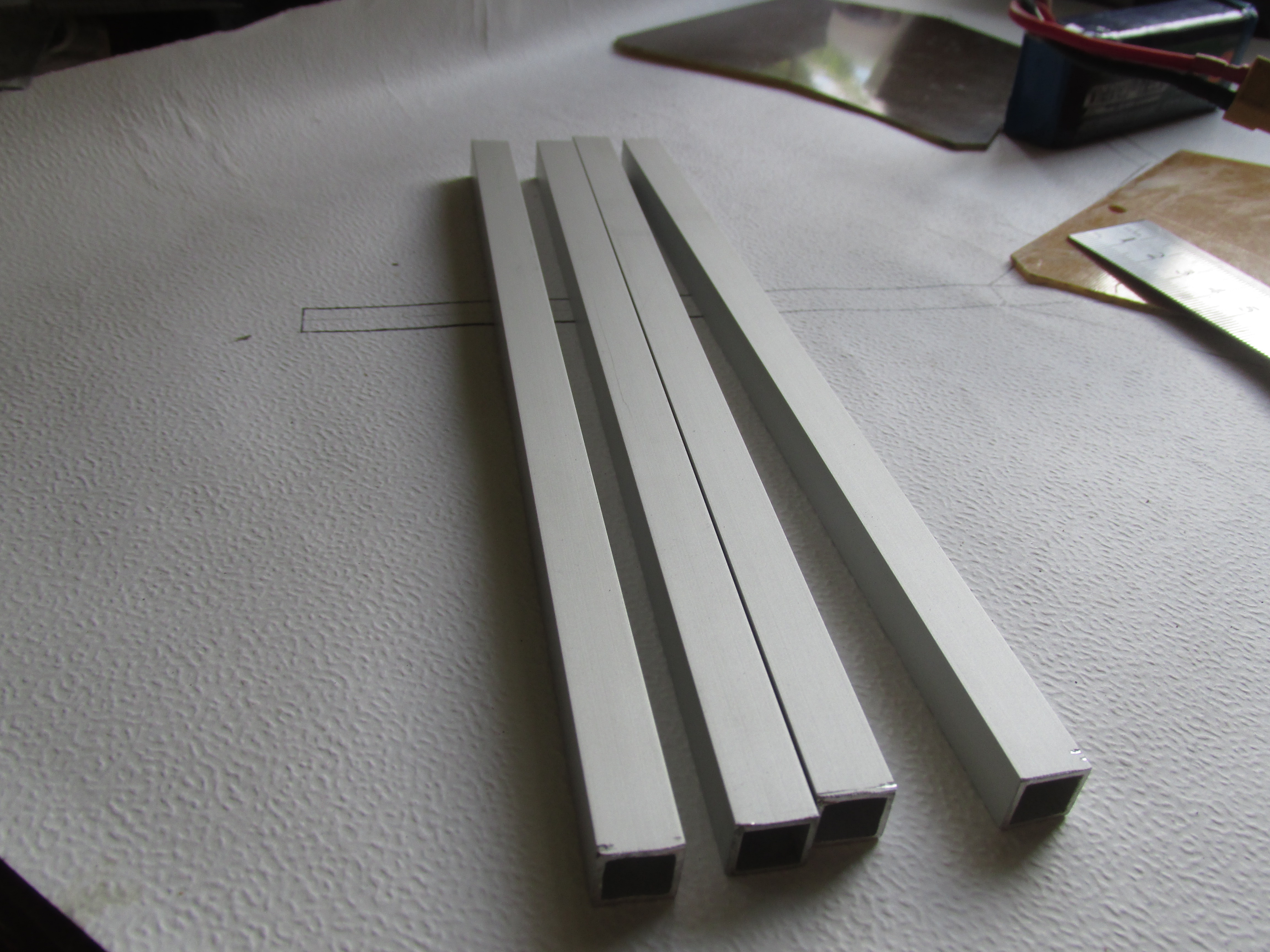
Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм
Предварительная версия...
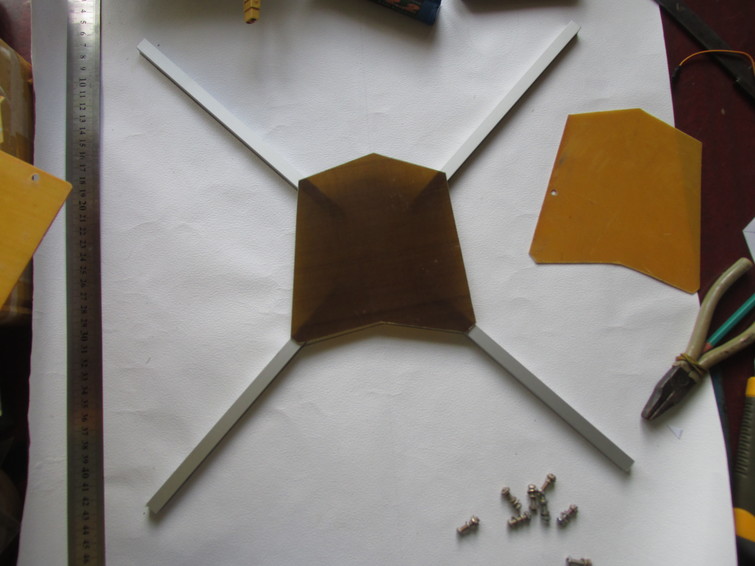
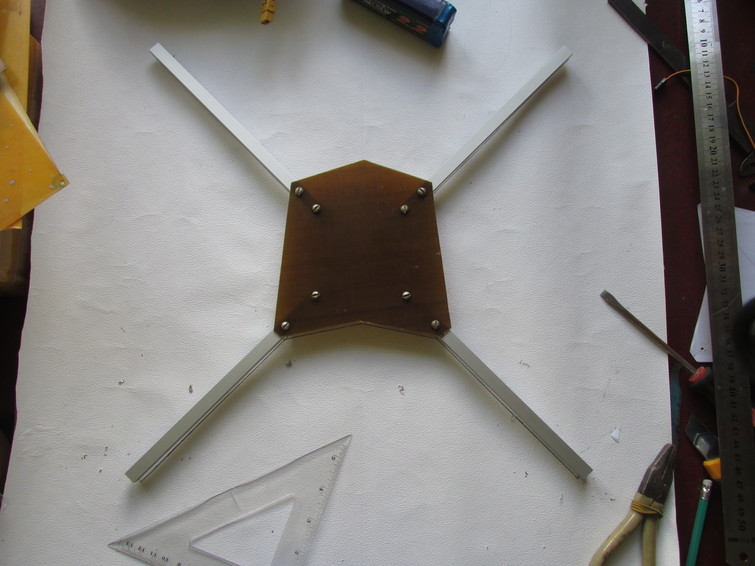
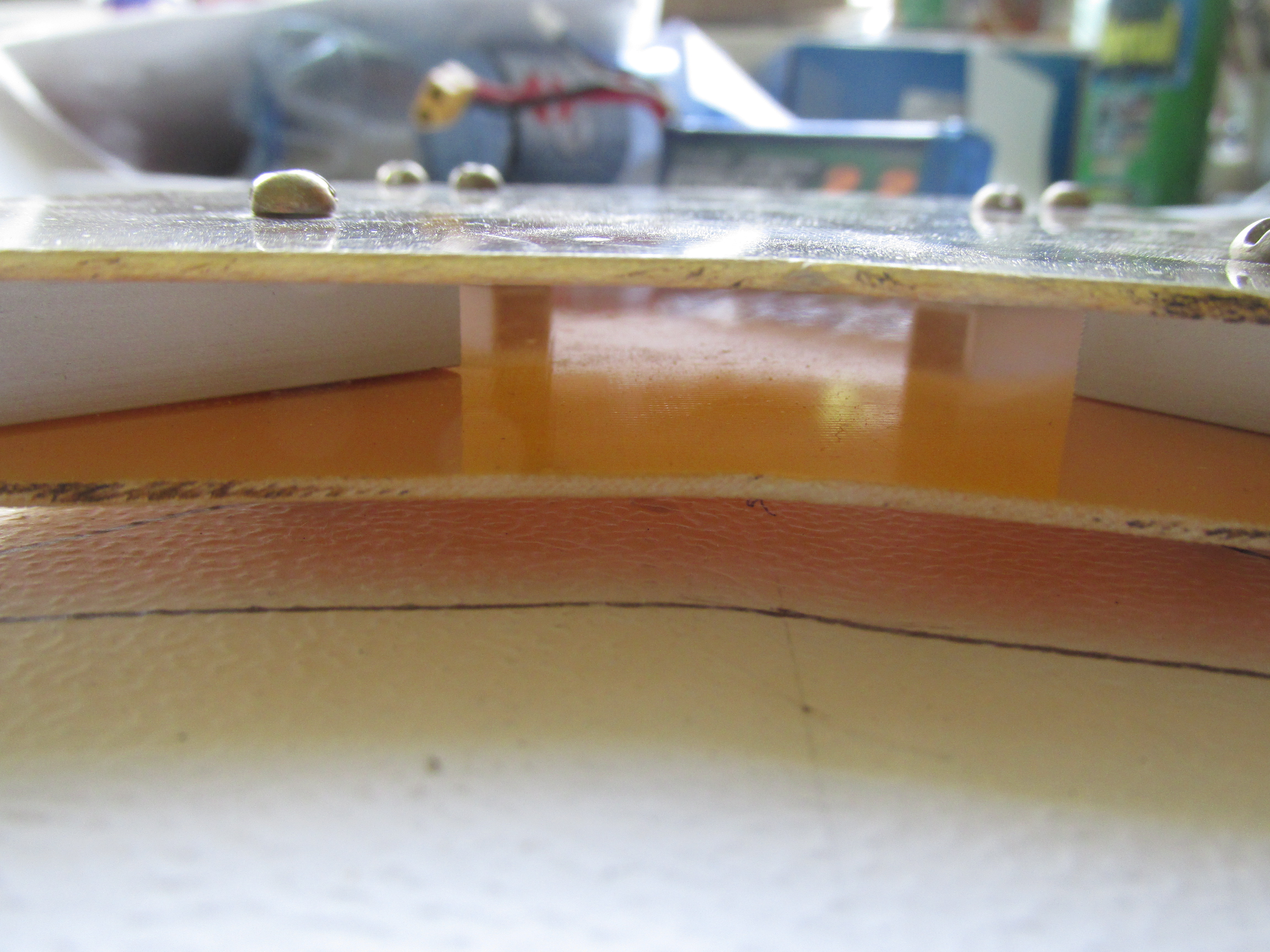
Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
 Идём далее...
Идём далее...
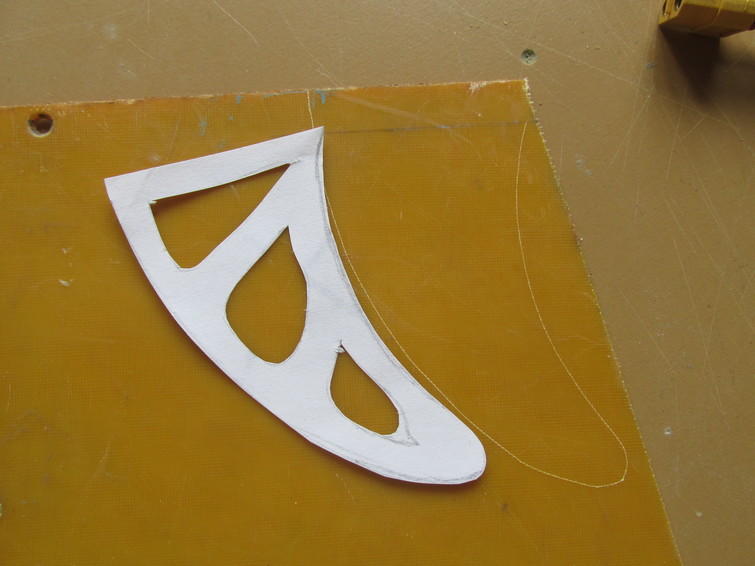
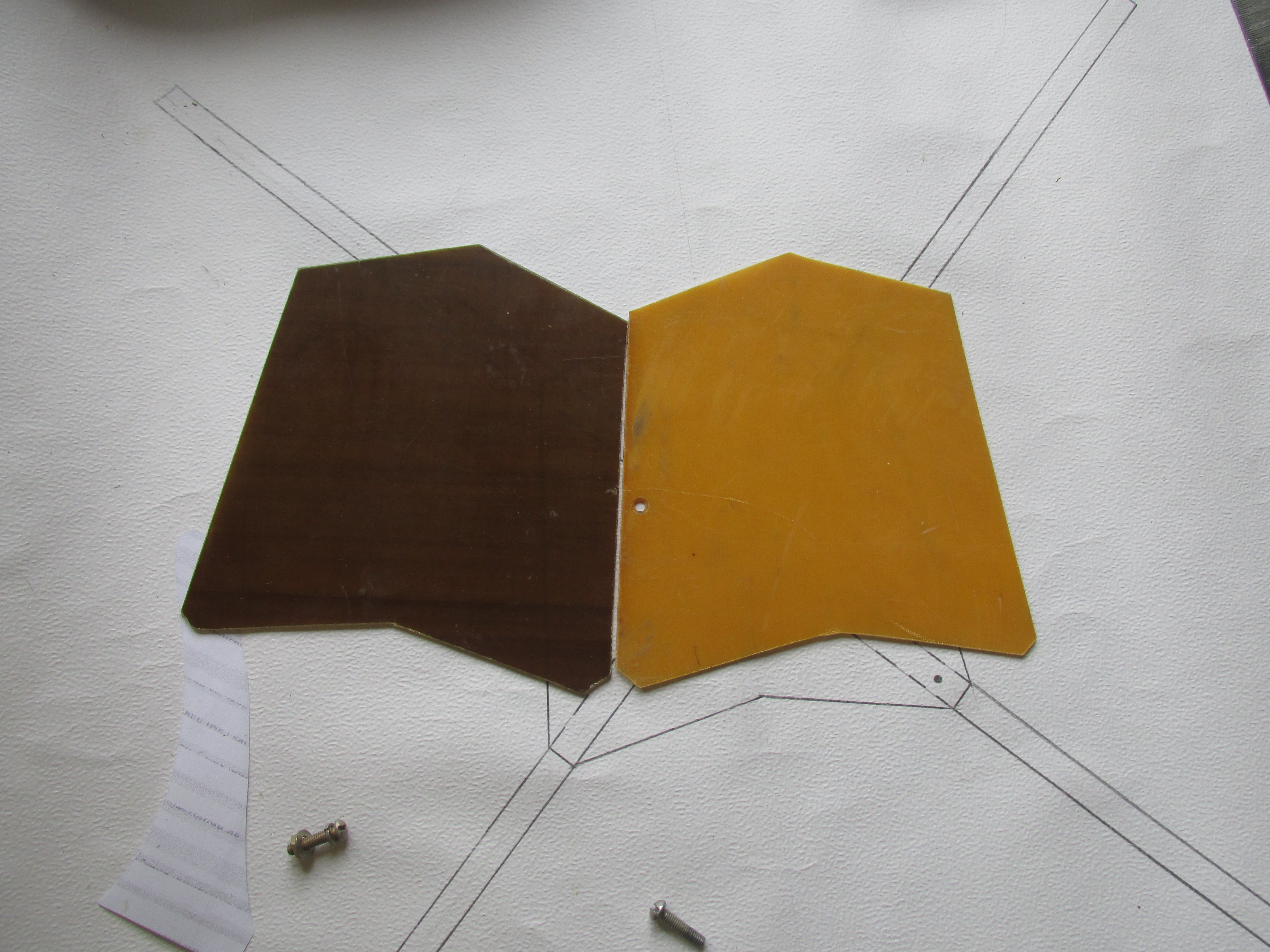
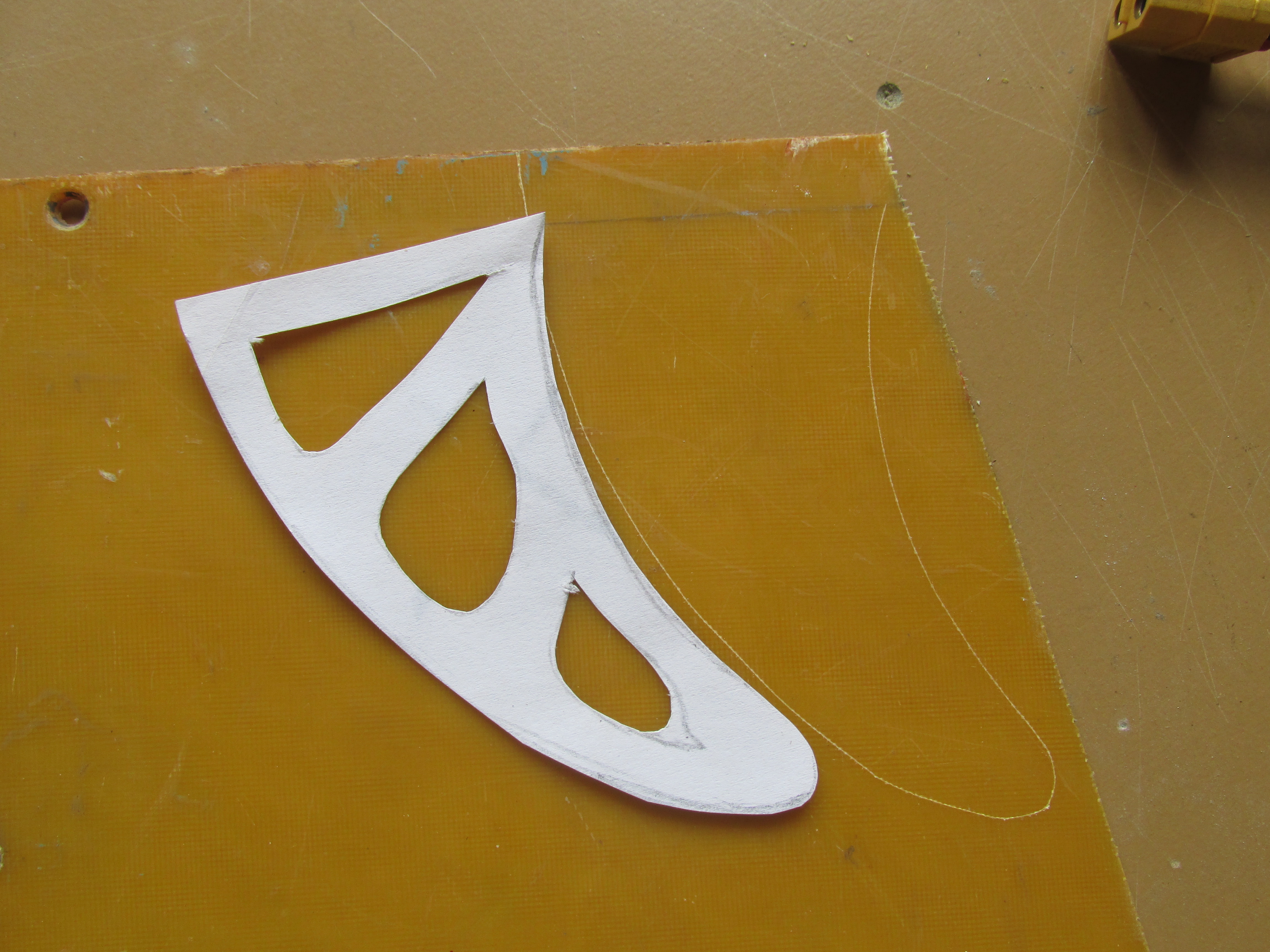
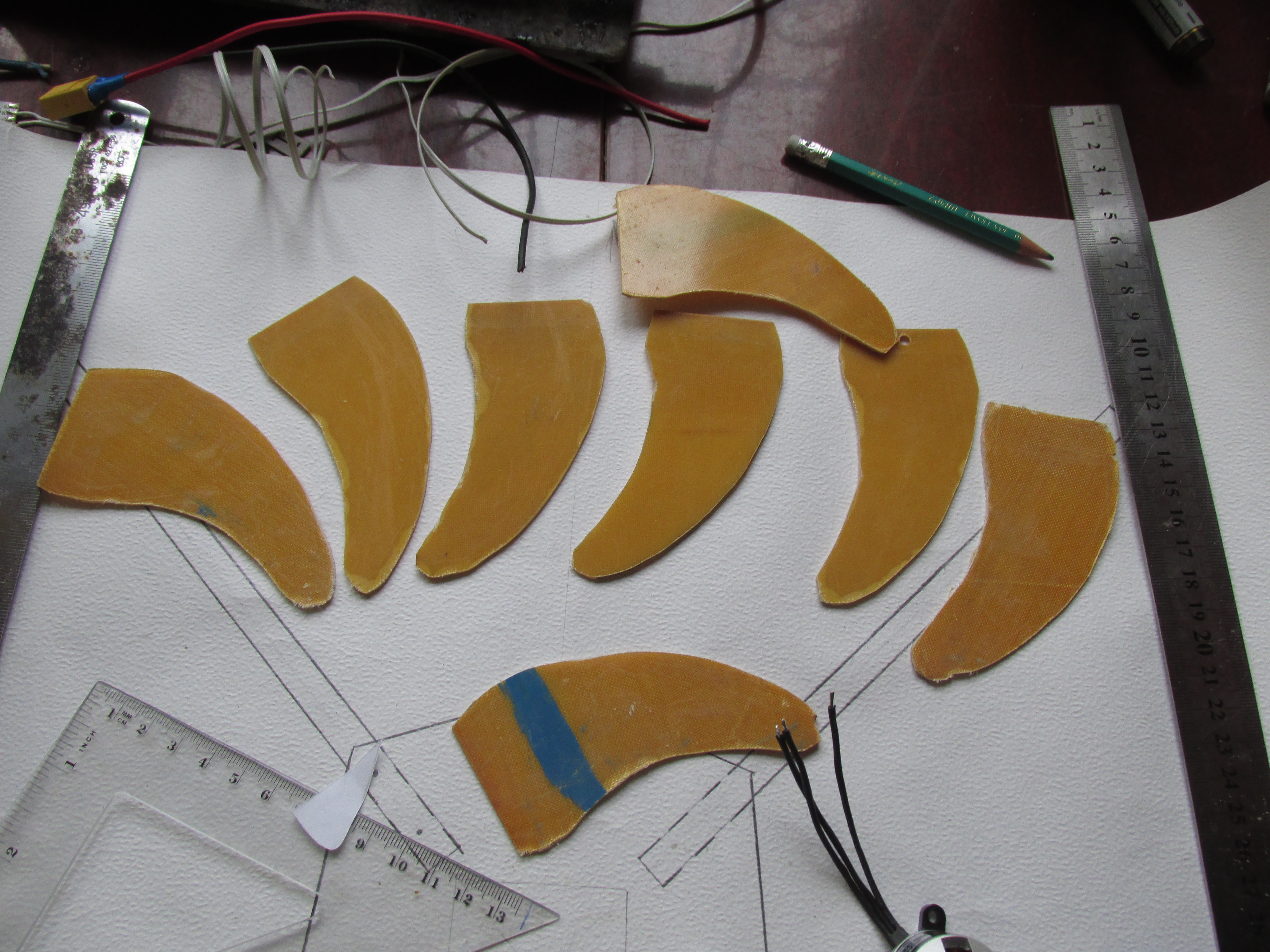
Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
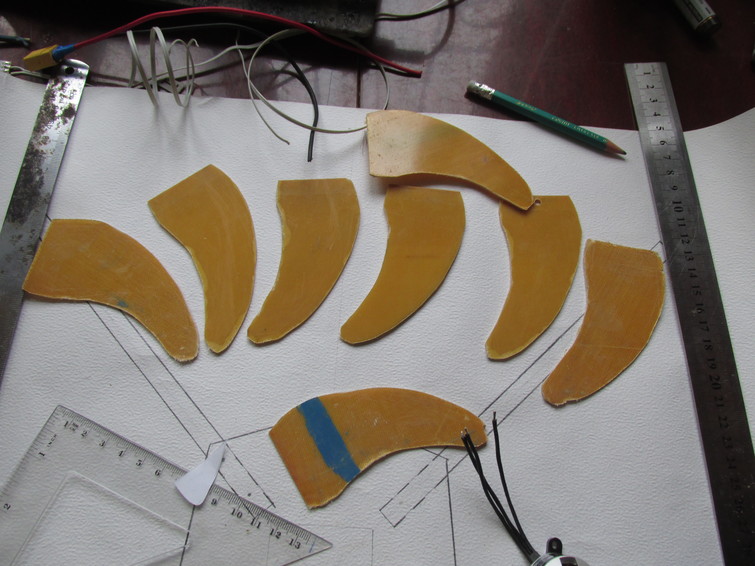 После чего приступил к мучению шуруповёрта
После чего приступил к мучению шуруповёрта
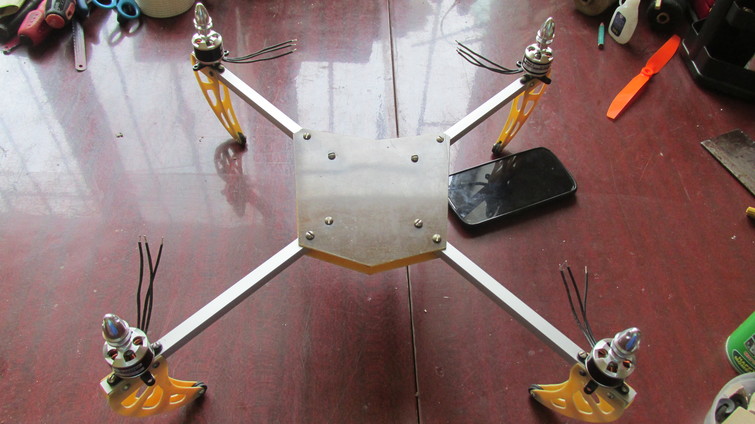
 Несмотря ни на что, дрон всё-таки встал на свои ноги)
Несмотря ни на что, дрон всё-таки встал на свои ноги)
 А теперь - взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
А теперь - взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
Теперь, когда рама собрана, можно приступить к установке комплектующих.
Моторы и регули я выбрал эти:
 EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC
EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC
 Товар http://www.parkflyer.ru/ru/product/1669970/
Мозг, всем известный cc3d
Товар http://www.parkflyer.ru/ru/product/1669970/
Мозг, всем известный cc3d
 CC3D Flight Controller
CC3D Flight Controller
Товар http://www.parkflyer.ru/ru/product/1531419/
Батарея:
 Аккумулятор литий-полимерный ZIPPY Flightmax 3000mAh 3S1P 20C
Аккумулятор литий-полимерный ZIPPY Flightmax 3000mAh 3S1P 20C
Товар http://www.parkflyer.ru/ru/product/8851/
Моторы со штатными крестиками крепил к лучам на болты и гайки

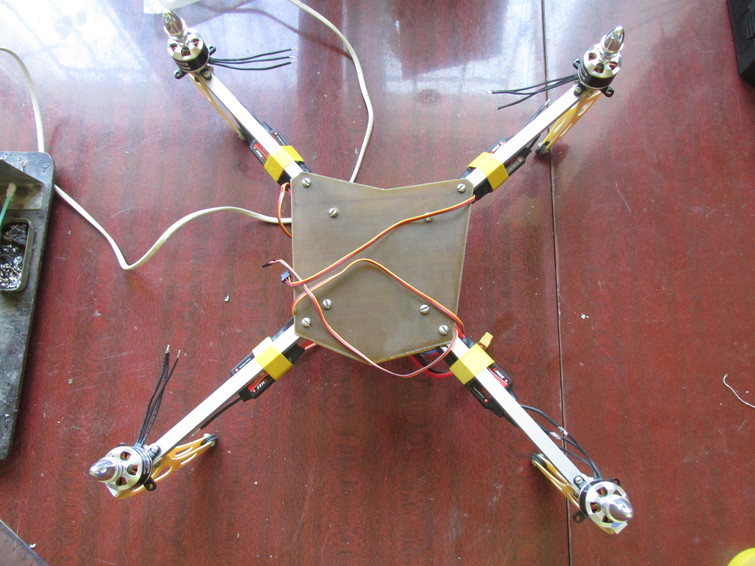
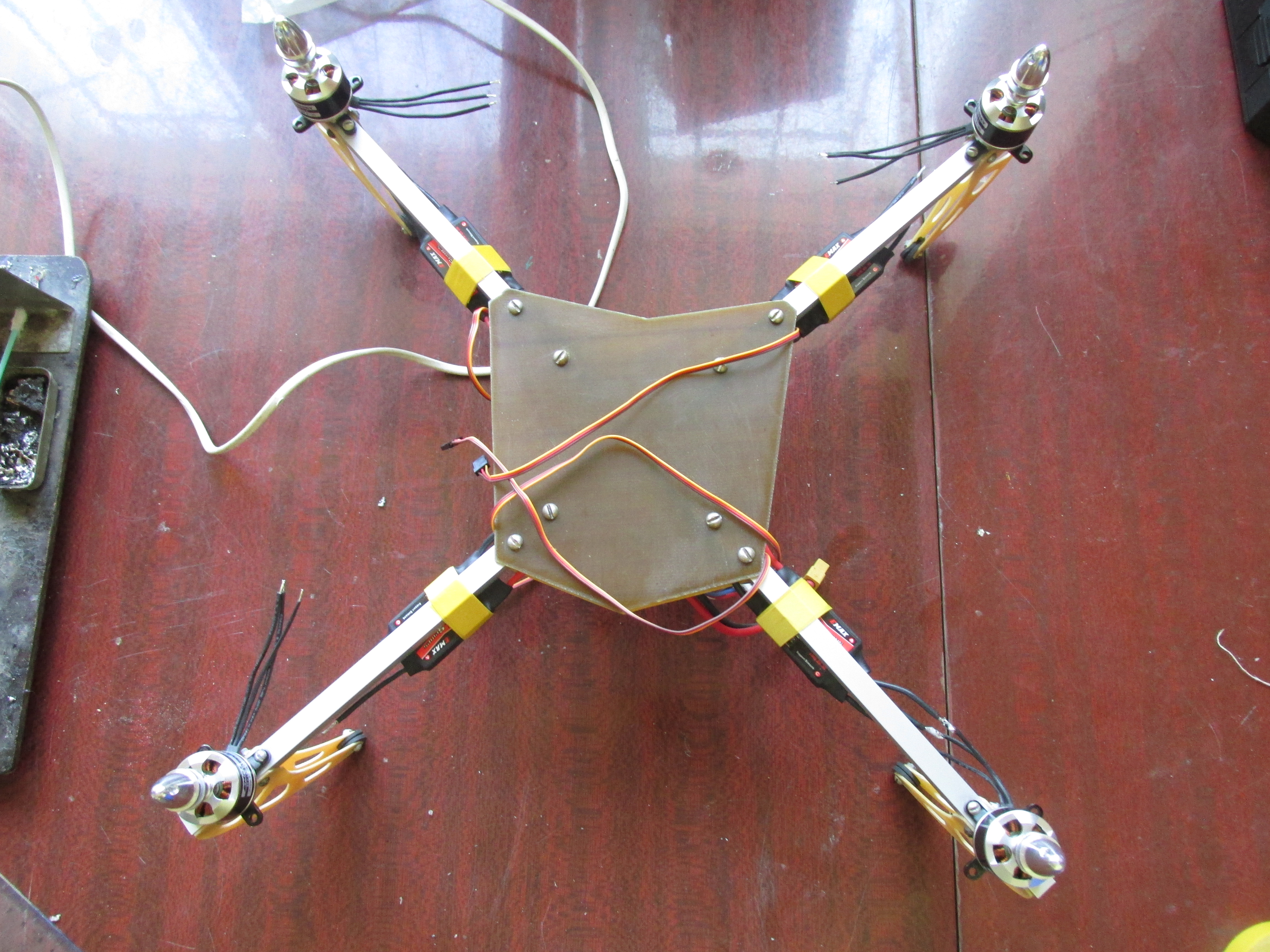
 Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.
Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.


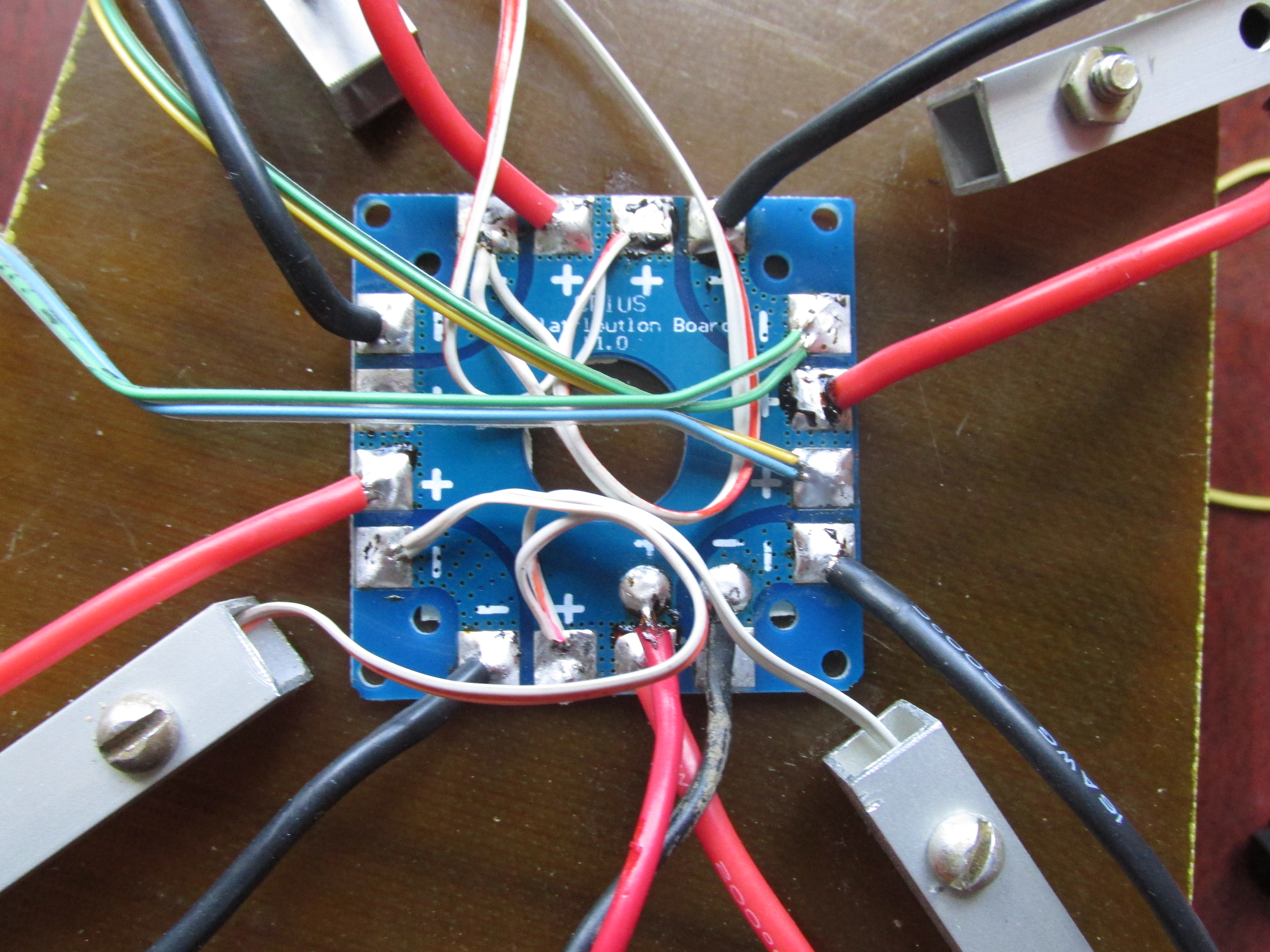
 Затем плату распределения питания разместил между пластинами стеклотекстолита
Затем плату распределения питания разместил между пластинами стеклотекстолита
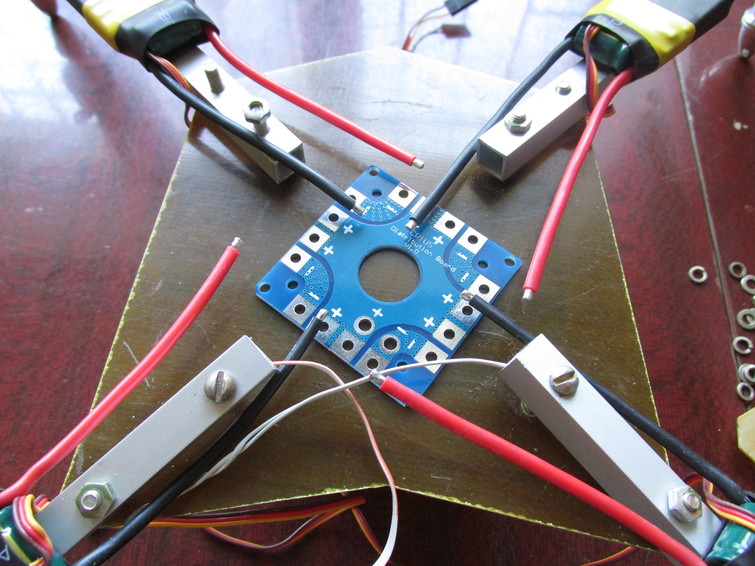 Припаял все нужные провода (регуляторов, габаритных огней).
Припаял все нужные провода (регуляторов, габаритных огней).
Перфекционистам не смотреть)))
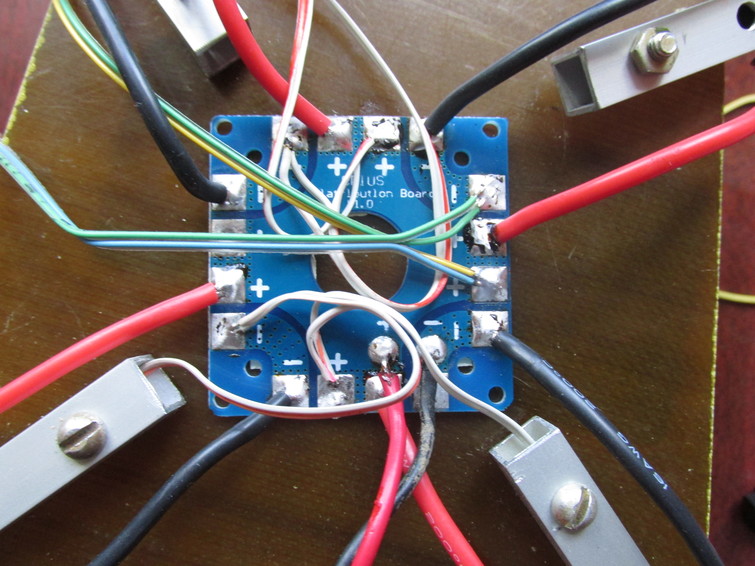 Проверил работоспособность...
Проверил работоспособность...
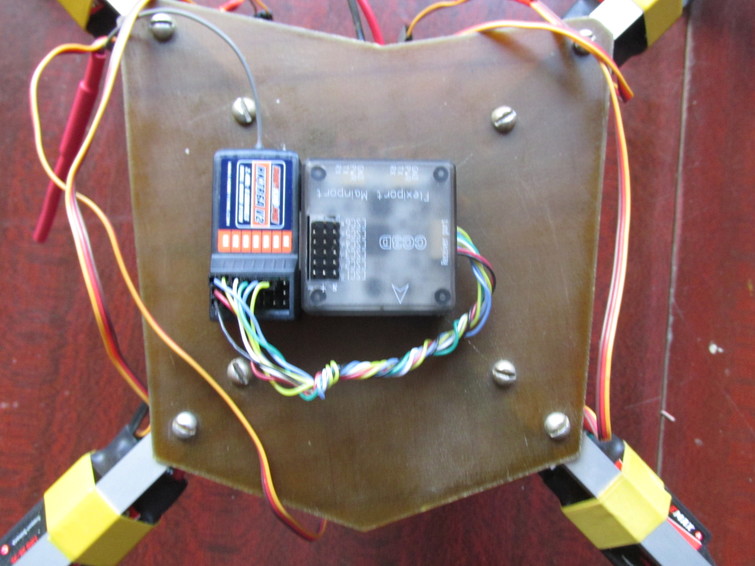
 Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч.
Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч.
 Также поступил с приемником
Также поступил с приемником
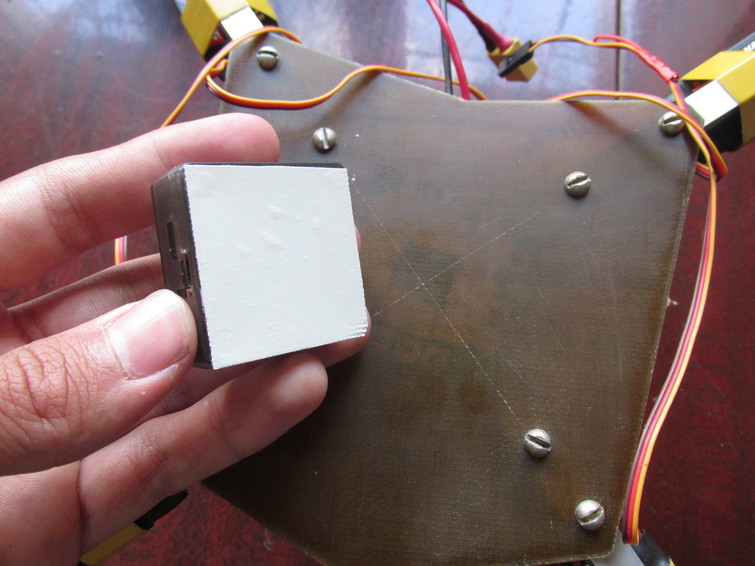
 Крепление батареи осуществляется благодаря липучкам на нижней основе квадра.
Крепление батареи осуществляется благодаря липучкам на нижней основе квадра.
 Вот и всё! Полётный вес квадрокоптера - 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Вот и всё! Полётный вес квадрокоптера - 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Видео полётов смотрите с 2.50 минуты
Квадрокоптер был построен в конце лета 2016, сейчас начало 2017г. За этот период квадрокоптер побывал в небе достаточное количество времени. В данный момент коптер цел, не было ни одного краша, я его немножко модернизировал, для установки камеры на его борт. В дальнейшем хочу на нём научится летать по fpv. Сейчас потихоньку начинаю собирать Fpv систему, видеопередатчик, приёмник уже заказал))
Спасибо всем кто читал выше изложенное, если есть вопросы, советы, пожелания - пишите в комментариях. Ниже представлены фотографии сделанные камерой, установленной на квадрокоптере, ну и сам коптер.
С Ув. Алексей








 15.01.17
15.01.17




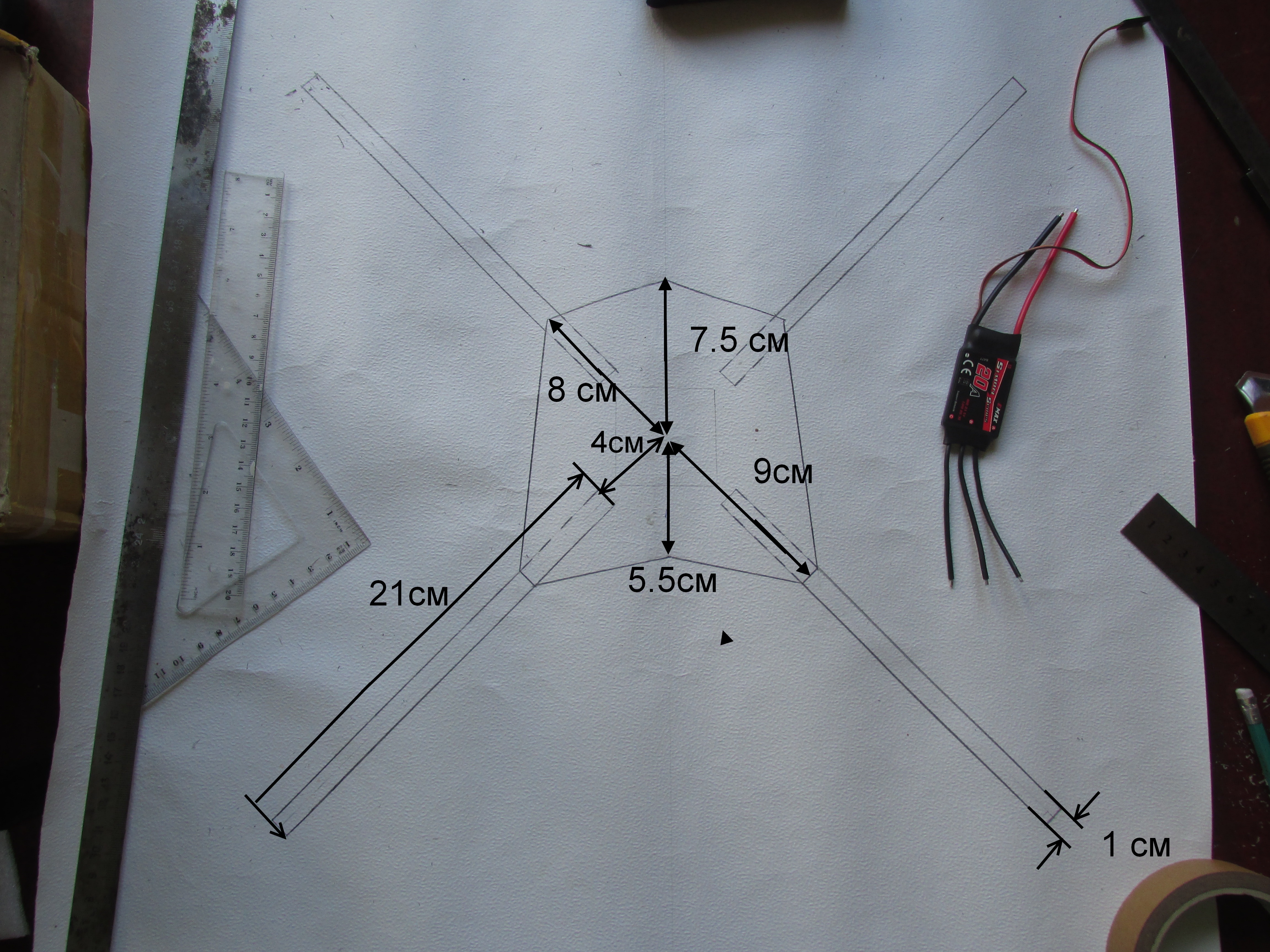
Кстати, размер выбрал 45 - универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю.
Собрав дома весь стеклотекстолит, приступил к выпиливанию двух одинаковых основ, между которыми будут зажаты лучи.
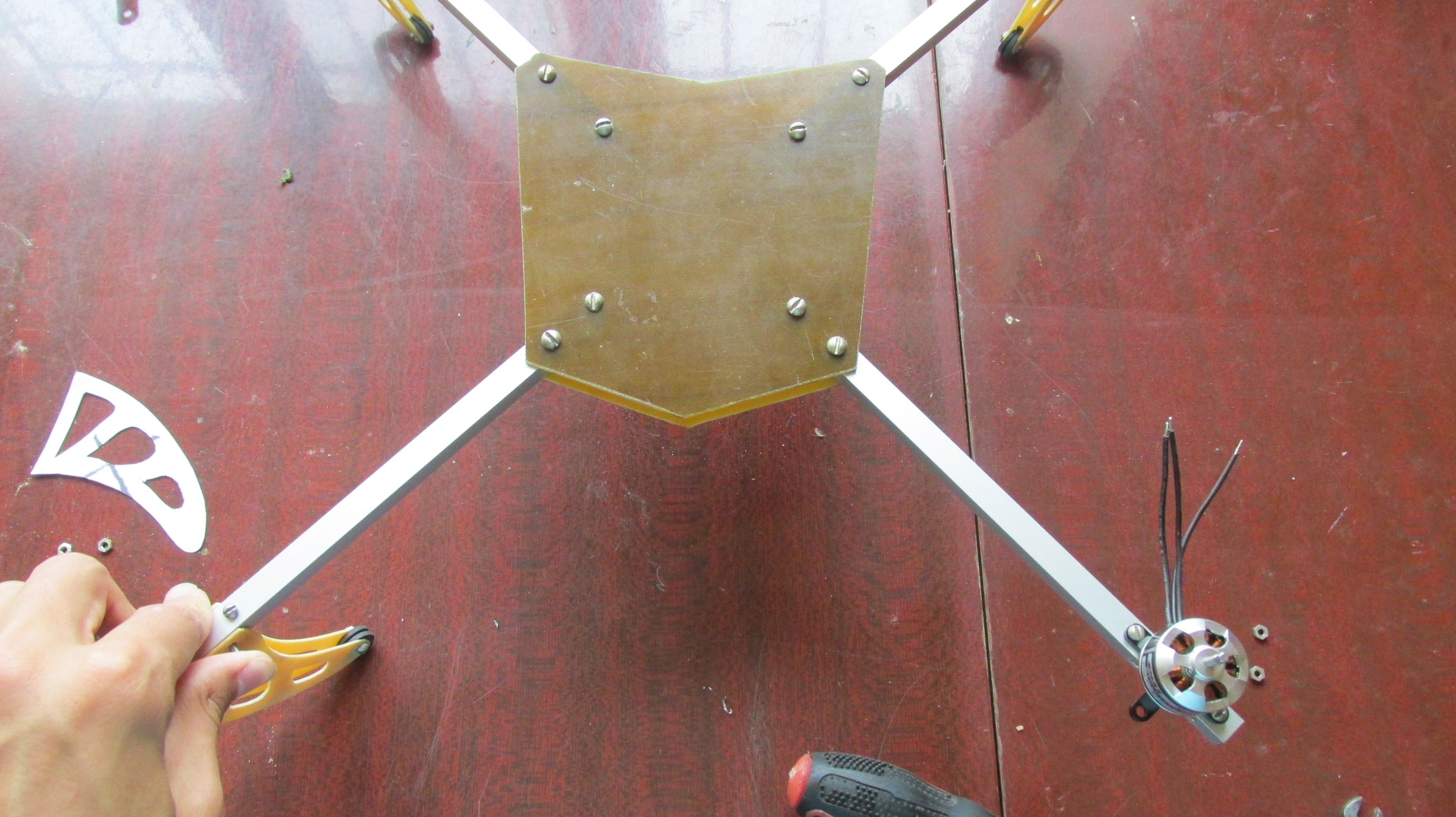
Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм
Предварительная версия...
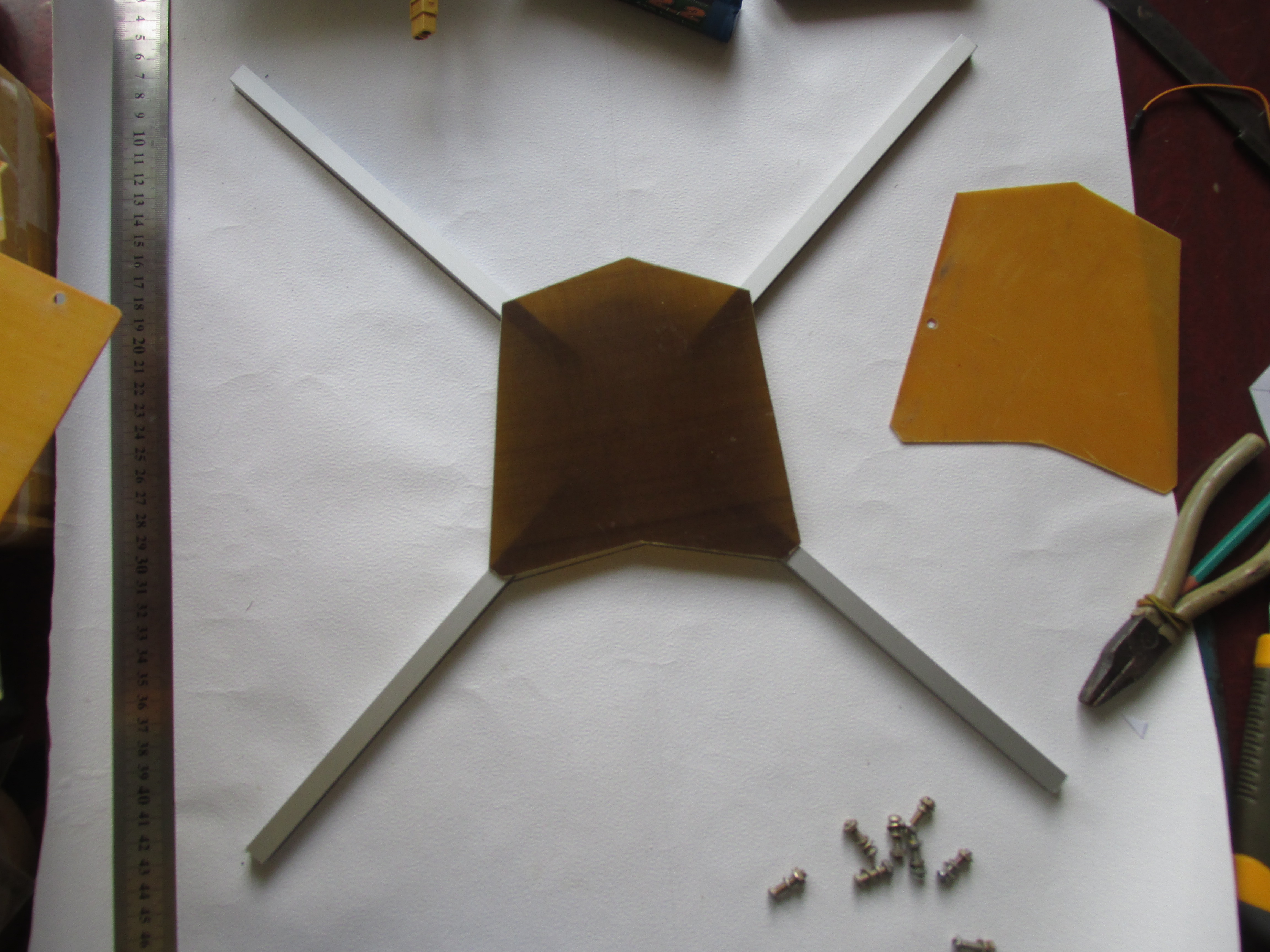
Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
 Идём далее...
Идём далее...Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
 После чего приступил к мучению шуруповёрта
После чего приступил к мучению шуруповёрта Несмотря ни на что, дрон всё-таки встал на свои ноги)
Несмотря ни на что, дрон всё-таки встал на свои ноги) А теперь - взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
А теперь - взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы? Теперь, когда рама собрана, можно приступить к установке комплектующих.
Моторы и регули я выбрал эти:
EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC Товар http://www.parkflyer.ru/ru/product/1669970/
Мозг, всем известный cc3d CC3D Flight Controller Товар http://www.parkflyer.ru/ru/product/1531419/
Батарея: Аккумулятор литий-полимерный ZIPPY Flightmax 3000mAh 3S1P 20C Товар http://www.parkflyer.ru/ru/product/8851/
Моторы со штатными крестиками крепил к лучам на болты и гайки

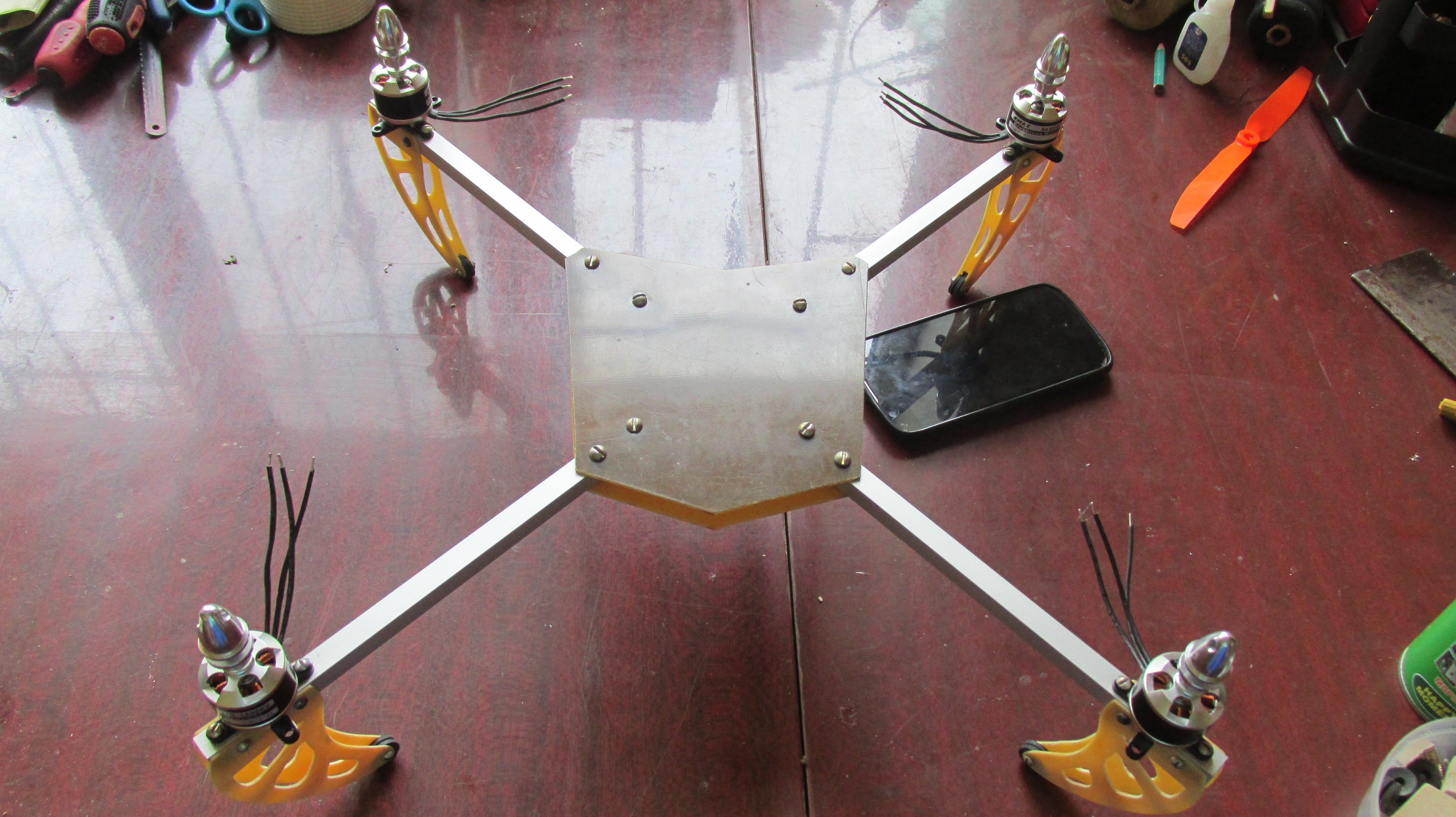 Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.
Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.

 Затем плату распределения питания разместил между пластинами стеклотекстолита
Затем плату распределения питания разместил между пластинами стеклотекстолита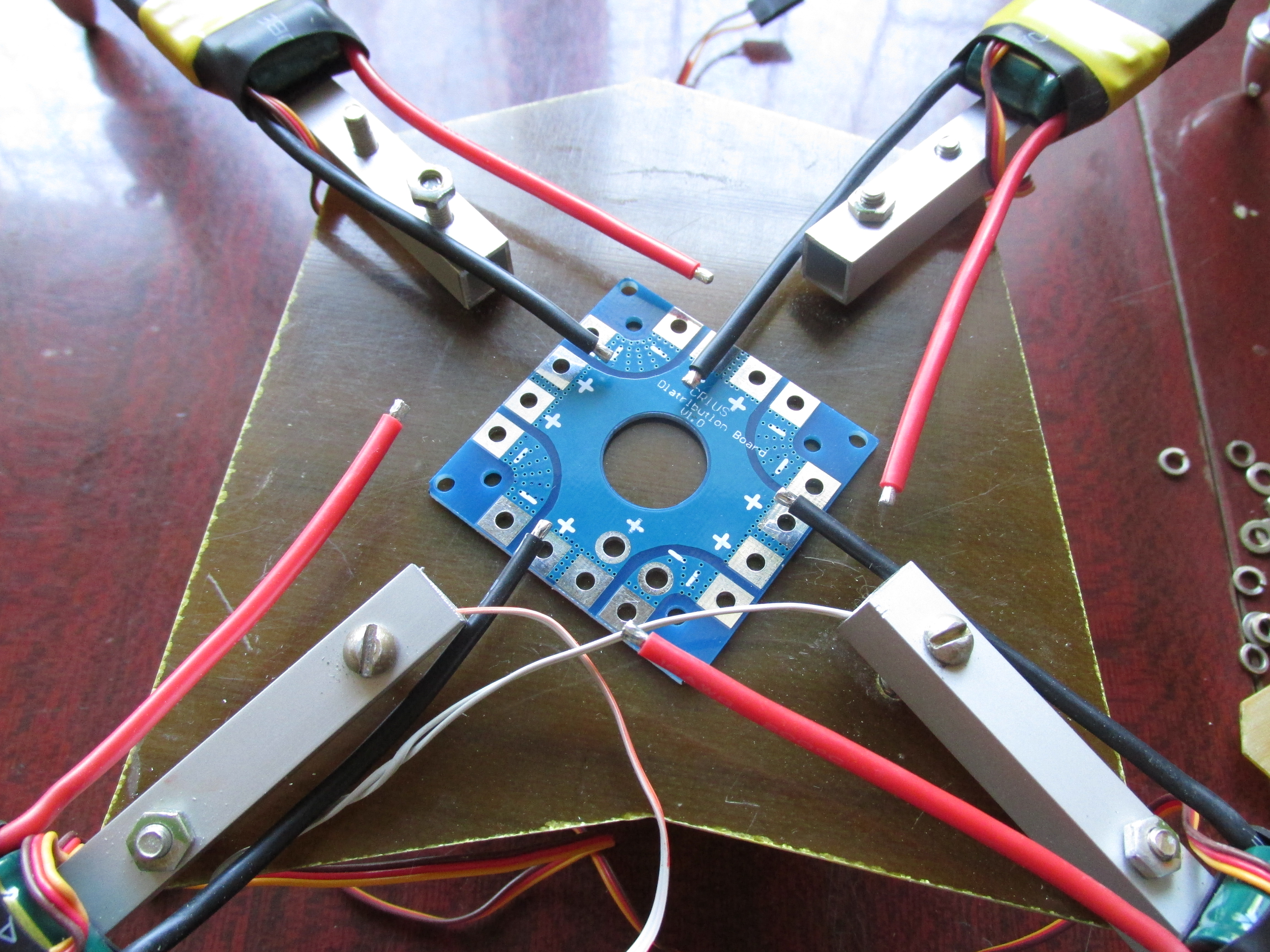 Припаял все нужные провода (регуляторов, габаритных огней).
Припаял все нужные провода (регуляторов, габаритных огней). Перфекционистам не смотреть)))
 Проверил работоспособность...
Проверил работоспособность... Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч.
Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч.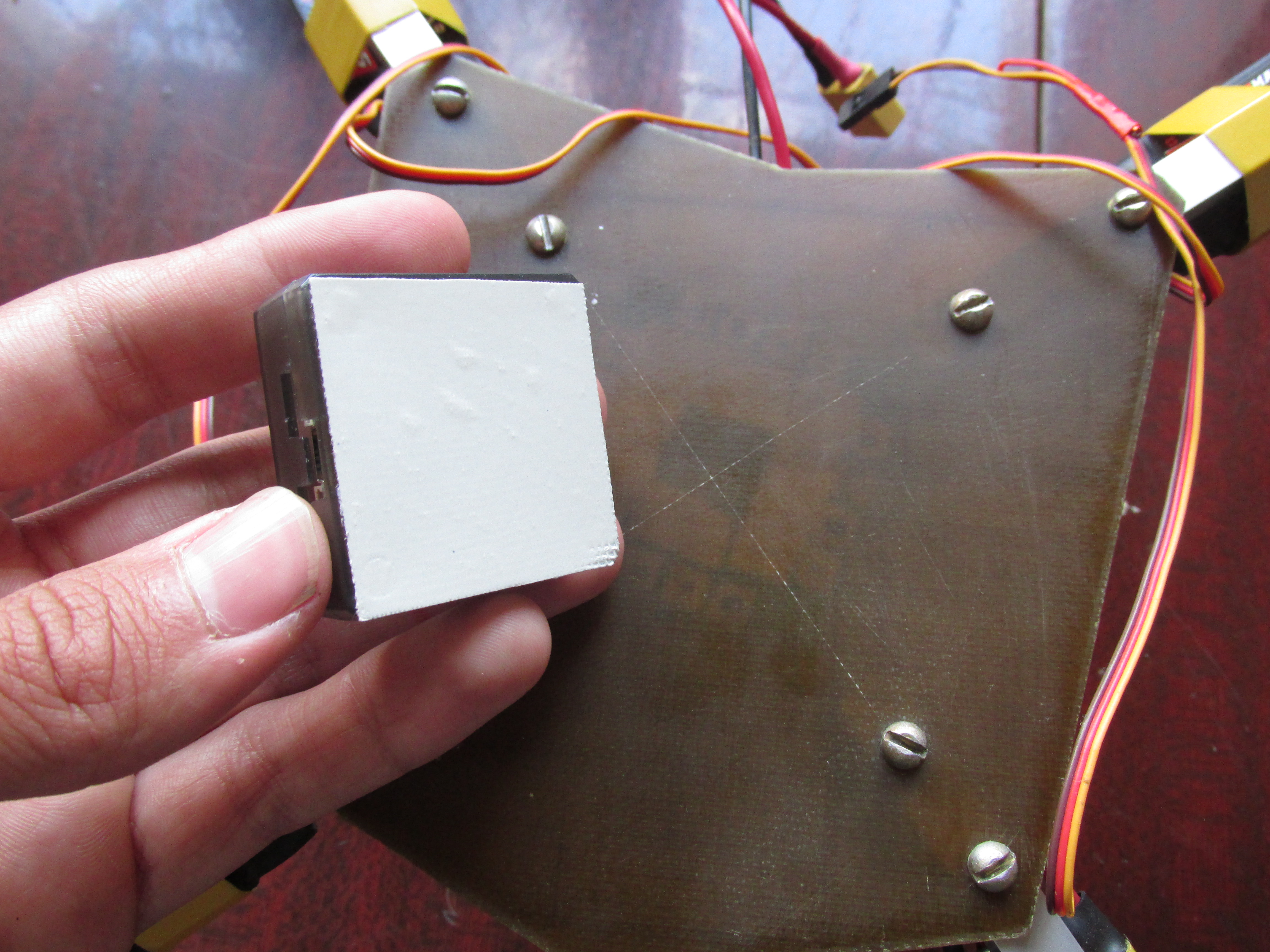 Также поступил с приемником
Также поступил с приемником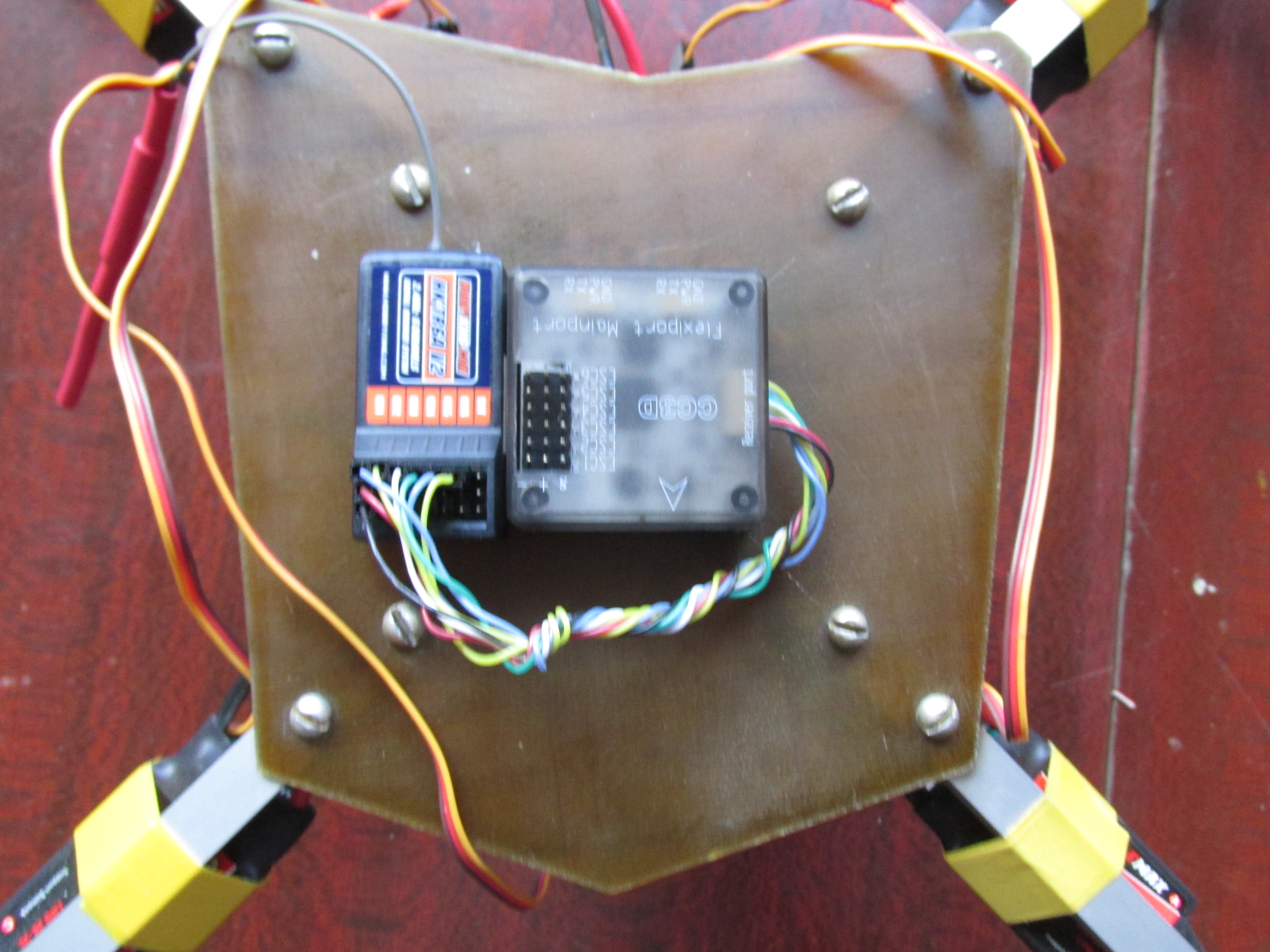 Крепление батареи осуществляется благодаря липучкам на нижней основе квадра.
Крепление батареи осуществляется благодаря липучкам на нижней основе квадра. Вот и всё! Полётный вес квадрокоптера - 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Вот и всё! Полётный вес квадрокоптера - 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.Видео полётов смотрите с 2.50 минуты
Квадрокоптер был построен в конце лета 2016, сейчас начало 2017г. За этот период квадрокоптер побывал в небе достаточное количество времени. В данный момент коптер цел, не было ни одного краша, я его немножко модернизировал, для установки камеры на его борт. В дальнейшем хочу на нём научится летать по fpv. Сейчас потихоньку начинаю собирать Fpv систему, видеопередатчик, приёмник уже заказал))
Спасибо всем кто читал выше изложенное, если есть вопросы, советы, пожелания - пишите в комментариях. Ниже представлены фотографии сделанные камерой, установленной на квадрокоптере, ну и сам коптер.
С Ув. Алексей








 15.01.17
15.01.17
















- снять шасси полностью, просто плюхаться на пузо;
- насверлить в лучах отверстия или взять трубу профилем П;
- основу можно тоже облегчить, сделать её в решето.
Но я не гонщик за малым весом, всему есть предел. И я не хочу жертвовать прочностью рамы ради 70-100грамм.
Из-за экономии в весе смог уменьшить токи, и летать на батарее с меньшей токоотдачей. Она тоже дала экономию почти 25 грамм (пишу на память).
Всё вместе дало совсем другой аппарат - предъидущий просто лёг на полку пока я не раздолбил третью стрекозу. И сломалась она не из-за облегчений, а потому, что на ней летать было одно удовольствие - задаваться начал.
100 - это очень много и очень хорошо.
Кстати, твои движки позволяют крепить пропы прямо на вал с помощью пластиковых стяжек (под вырезы колокола мотора, как и все делают), потом взвесишь отдельно цанги :-).
А текстолит лучше пилить чем-то типа дремеля, у меня китайский, но даже с ним на чёрновую обработку всех пластин рамы уходило максимум полдня. Главное приноровиться.
Удачи, чистого неба и мягких посадок!
Спасибо за пожелания и советы)))
Сейчас на обоих трёшках стоит отпечатанный на 3D принтере штатный механизм от мини трикоптера Девида. И серва из перечня рекомендованных, только вот обратную связь пока не делал.
Немного разгребусь и буду перебирать обе машинки - в планах новый полётник и полная защита от влаги. Сейчас КПТД залиты регули и плата одной из камер. Надо всё под пайку и всё герметить.
Погоды толком нет, так что пока перешёл на покупной QX95. Предупреждая вопросы - отличная муха, летал и на улице, и в снег падал. Пока условно живая - жду пищалку, чуть позже закажу винты и раму. Баловался с флипами и так приложил об пол, что треснул луч.
- можно закзать трубки из текстолита
Замечания:
-В статье не указаны используемые пропы.
-Цанги на коптерах - зло. Балансировать тяжело и баланс постоянно слетает.
-Мотор лучше крепить без посредников прямо к профилю. На болты одевать шайбочки, чтобы натяг сохранялся. Алюминий имеет неприятное свойство внезапно "промяться" под болтом. Под вал в центре высверливается отверстие.
-ВМГ все-таки не коптерная. Я бы выбрал CF2822 + любой регуль с blheli, чтоб oneshot использовать.
-Про прошивку мозга ничего не сказано.
-Пропеллеры использовал 8*4,5 самые дешёвые, 5$ за 10шт.;
-На даные моторы кроме цанг или пропсейвероы ничего не поставишь;
-По поводу крепления моторов понял, буду переделывать;
-Про ВМГ сам знаю;);
- CC3d прошивал прошивкой betafligh 2.1.6
Спасибо за советы)
При постройке следуещего квада учту все ошибки.
Не ну рама конечно бомбезная!
В общем решил попробовать детальки из фанеты и покрыть с двух сторон стеклотканью. Получается легче по весу и пилить проще, ну по жесткости уступает конечно (смотря как расположить волокна у фанеры). Если вам интересно потом покажу что получилось.
Будит смотреться приблизительно так...
В общем обращайтесь если что. Буду рад помочь.
С уважением отношусь к "Моделистам" которые собирают аппараты своими руками.
П.С. Рекомендую, вобщем. :)
На мой взгляд самолетчика, крепеж моторов настораживает, может оторвать от легкого дисбаланса винта.
И на двойных подпорках можно было бы сэкономить, ИМХО.
Вы очень хорошо предсказали последствия такого крепления моторов. У одного лопнул крестик, хорошо что сразу заметил и всё обошлось. После балансировки винтов ещё всё живое. Но моторики в дальнейшем буду по другому устанавливать.