Человеку свойственно ошибаться, а глупцу — настаивать на своей ошибке. (Цицерон)
Дорогие друзья, коллеги, на этот раз решил поведать Вам историю создания еще одного из моих аппаратов, а на самом деле даже двух.
Но не будем забегать вперёд.
Естественно, как наверное и многие тут, начал замечать тенденцию перевода большинства статей в формат видео роликов, но как человек консервативный и нечуждый прекрасному всё же хочу рассказать эту историю по старинке, стуча пальцами по клавиатуре, обильно приправляя повествование иллюстрациями и по возможности формулами с расчетами. Те, кому претят длинные эпосы могут не напрягать себя сим, а для тренировок очень советую букварь вкупе с учебником математики для 5-го класса. Шутка.
Приступая к проектированию и постройке конкретной модели, уже имел достаточно большой опыт в FPV, совершил порядка 50 полётов. Построил два бальзовых мотопланера, крайний из которых эксплуатирую до сих пор. Зовут его Малыш. Правда последние годы он летает управляясь исключительно визуально (FPV оборудование с него снято), и только для показательных выступлений. Ниже их фото и короткий фрагмент полёта “строем”. Камера летит на Skywalker-е.


Имя для нового проекта как часто и бывает, пришло по ходу пьесы. Назвал я его Касатка.
Многие пилоты, увлеченные FPV, возможно считают, что главное в нашем деле это правильный подбор и настройка электроники (передатчик, приёмник, OSD, автопилот, LRS-ка, антенны)... И конечно они правы! Но всё же на первое место по степени важности я ставлю выбор носителя. Далее по пунктам:
1) Лётные качества. Планер медленный и вальяжный, на тот момент у меня уже был и на первое место вышли скоростные и пилотажные возможности. Очень хотелось построить аппарат поинтереснее. Имея опыт полётов, хорошо осознавал проблему ветра! Те, кто летает, меня поймут. А для остальных короткая справка… На высоте 500 метров ветер легко может быть 12 м/с, а это 43,2 км/ч, бывает и больше. Понятно, что если крейсерская скорость летательного аппарата составляет 60 км/ч (это, как показывает практика, хороший показатель), то путевая скорость или скорость по GPS будет уже….. каждый может посчитать сам. И это мы говорим только про случай горизонтального полёта. А в случае если хочется лететь набирая высоту, путевая скорость может стать даже отрицательной, соответственно аппарат будет двигаться попой вперёд. Как много раз мы это проходили…
2) Внешний вид. В статье про биплан написал подробно, здесь замечу лишь, что если эксплуатируешь красивый деревянный или пластиковый самолёт начинаешь гораздо ответственнее относиться ко всему комплексу оборудования в целом. Более тщательно выбираешь погоду, площадку для полётов, проверяешь оборудование по 10 раз. Естественно это позитивно сказывается на количестве авиационных происшествий и предпосылок к ним.
3) Удобство транспортировки на поле. Мои модели живут, как ни странно, в моделке, но в собранном состоянии (висят под потолком). Планер Малыш имеет размах 2640 мм, и он достаточно сложен в сборке – разборке, поэтому в летний сезон, когда на лётное поле приходилось выезжать, он летал относительно редко (8-10 раз), зато зимой замерзает озеро и ехать никуда не нужно. Новый носитель хотел сделать максимально легко разборным, действительно, что может быть проще, чем просто открутить одно цельное крыло (2 пластиковых болта) и отцепить 5 разъёмов?! По поводу цельного крыла вопрос дискуссионный, но собрал именно так ибо ИМХО так легче, надёжнее, прочнее и нет никаких проблем в транспортировке одной цельной детали длиной 1590 мм.
4) Скорость сборки - разборки на месте. Это относиться как к самому аппарату, так и комплексу наземного оборудования. На поле может случиться всякое. Например, может прийти грозовой фронт с порывами ветра под 20 м/с, дождём, а иногда и не только. Если обычную авиамодель можно посадить быстро, то FPV может находиться достаточно далеко, соответственно время её возвращения домой может составлять 10-ки минут и более. Кто – то скажет: “Смотри прогноз погоды”. Естественно смотрим, в обязательном порядке, но как показывает практика, неожиданности случаются.
5) Простота размещения и доступа ко всей необходимой аппаратуре. Поскольку речь идет о носителе FPV, оборудования на таких самолётах много больше, чем на моделях управляемых визуально. Если не продумать всё заранее задача его размещения и последующего к нему доступа будет немногим проще чем у авто слесаря решившего перебрать двигатель через выхлопную трубу. Критически важно при этом разместить оборудование так, чтобы исключить или свести к минимуму взаимное негативное влияние компонентов системы друг на друга (многие знают, например, о влиянии излучения видео передатчика на работу некоторых видов серво машинок, также оно влияет со знаком “-” и на приёмник управления и на приёмник GPS).
Приведенных размышлений мне было достаточно, чтобы сесть за чертежи, попробовать спроектировать, а затем и построить “идеальный” носитель под свои задачи:
1) Более одного мотора. Таким образом обеспечивается большая надёжность ибо два мотора это еще и два пропеллера, два регулятора, два бека и тд.
2) Крейсерская скорость 80 - 90 км/ч.
3) Допустимая перегрузка +10 - 6 g. Возможность пилотаж покрутить. Объясню откуда взялись эти самые 10 единиц. Анализируя видео предыдущих полётов, нашел момент с выполнением мёртвой петли. Скорость на входе была 175 км/ч, а её диаметр по показаниям GPS (от момента начала вращения до верхней точки) 32 метра. Таким образом, перегрузка составила (V^2/R/9,8) 48,61м/с^2 / 16м / 9,8 = 15,06 ед.!!! Конечно эта цифра является приблизительной, ибо GPS работает с задержкой, да и упомянутый ветер внёс свои коррективы, но представление получить такой расчет позволяет.
4) Дальность полёта 15+ км. За счет скорости это не так много 10-12 минут в одну сторону, но ведь можно и “топнуть”.
5) Продолжительность полёта 30+ минут. Думаю, многие со мной согласятся, полёт в таком режиме особенно на низкой высоте это работа, реально устаёшь.
6) Возможность установки дополнительного оборудования. Фары для посадки в тёмное время суток, пиротехника (ракеты, дымы) для авиа шоу, камеры высокого разрешения.
7) Сделать аппарат максимально “не срывным” и с относительно большим диапазоном скоростей, чтобы при такой крейсерской скорости, посадочная оставалась в разумных приделах (40+- км/ч) и взлёт мог легко происходить с руки, без использования катапульты или ракетных ускорителей.
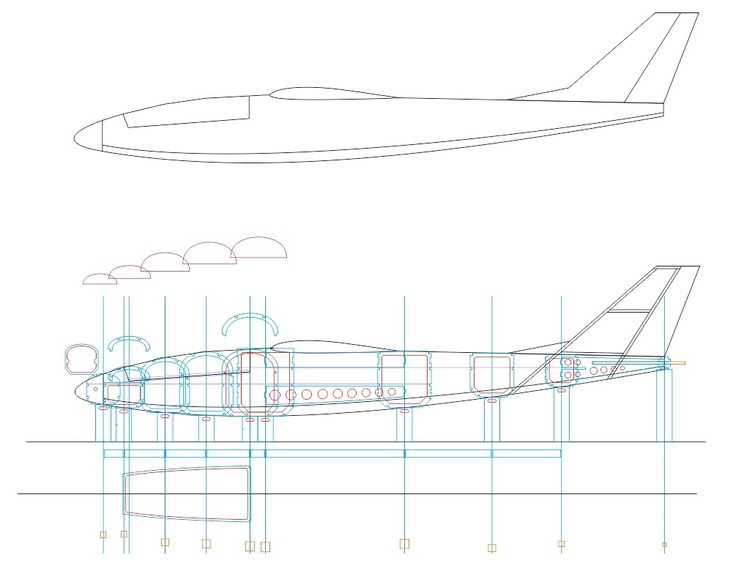
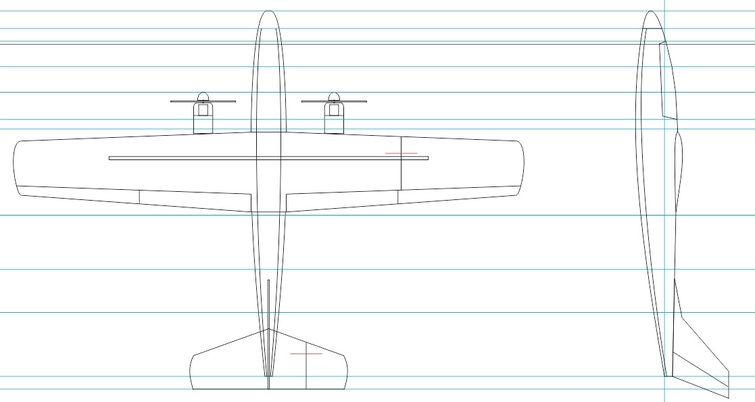
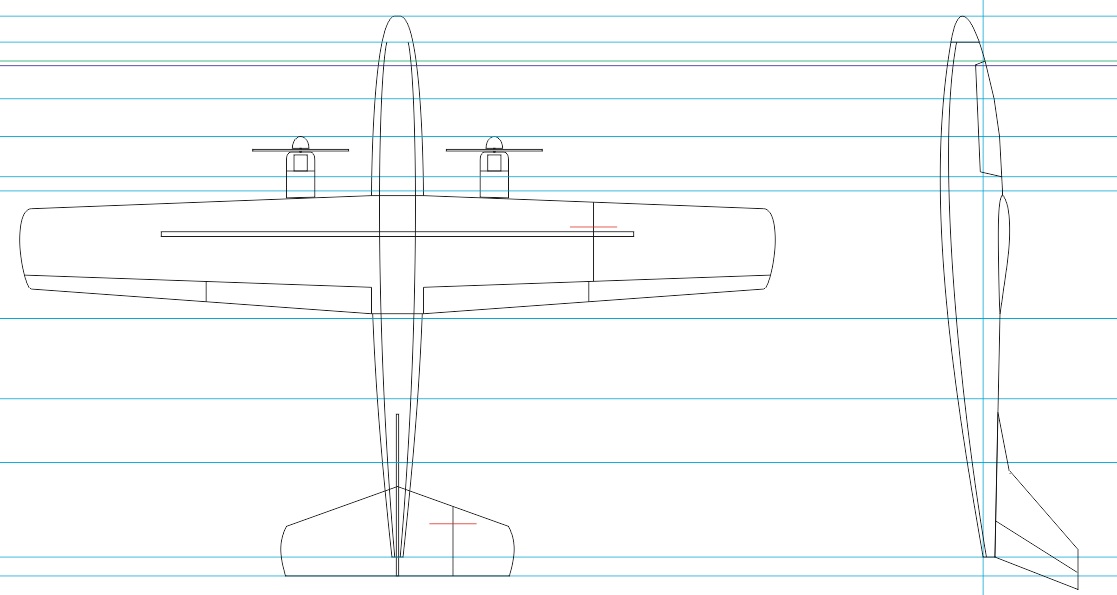
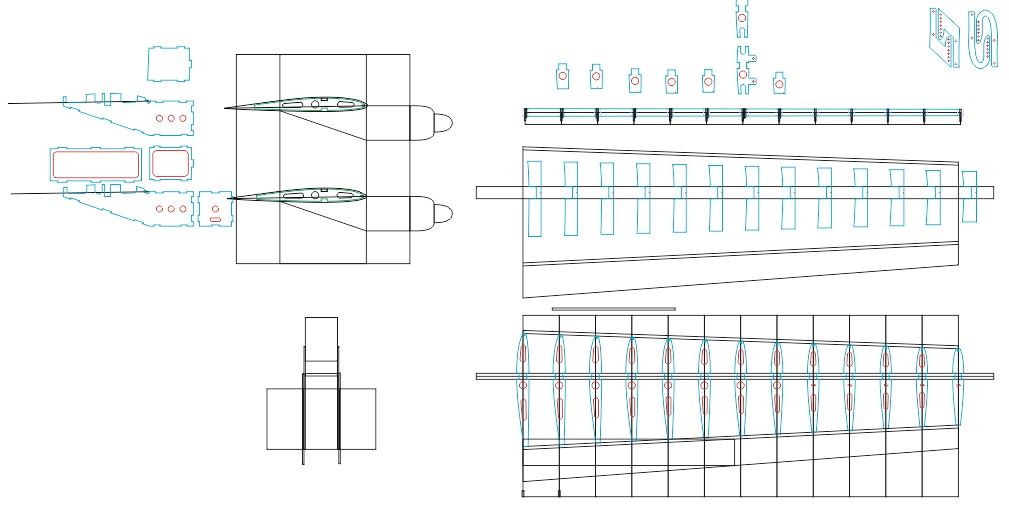
Чертежи были выполнены в CorelDRAW, т.е. 3D моделирование не применялось. Оказывается, технологии позволяют использовать подобный чертёж для лазерной резки, что и было с успехом выполнено. Все шпангоуты, нервюры, подставки, полки лонжерона, даже косынки нервюр, а главное оба стапеля (и для крыла и для фюзеляжа) всё было вырезано на таком чудесном станке. Точность при этом разумеется выше всяких похвал.
Предлагаю Вашему вниманию серию фотографий, иллюстрирующих процесс его создания. Описывать весь процесс, думаю, нецелесообразно. Для многих думаю, и так будет всё понятно, а остальные вполне могу удовлетворить свой интерес в комментариях. Естественно постараюсь на все ответить.






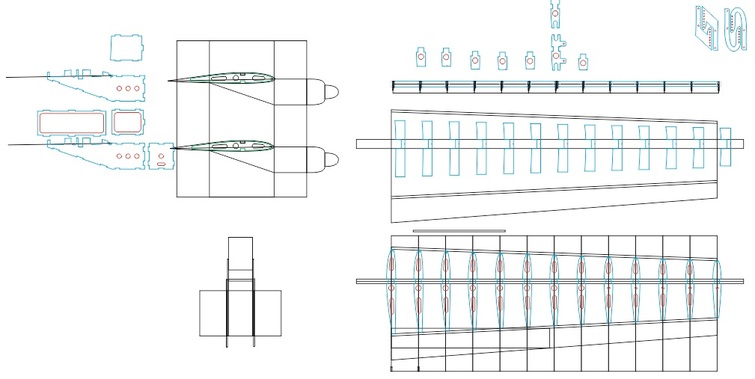
Хотел бы отдельно остановиться на этапе проектирования крыла. На данном аппарате применил сочетание геометрической и аэродинамических круток, всё по взрослому. Для построения поляр, выбора профилей, их сравнения и анализа пользовался программой Profili 2.0, также она позволяет построить нервюры, включая промежуточные и сохранить их в формате dfx, который в свою очередь с удовольствием “кушает” упомянутый CorelDRAW. Программа действительно замечательная, но дабы не превращать своё повествование в учебник в этой статье основы работы с ней решил не рассматривать. Все, кому интересно, легко могут самостоятельно её скачать и разобраться. Использованы два профиля: корневой MM 1995 хорда 250 мм и концевой NACA 0013 хорда 170 мм, геометрическая крутка -2 градуса. Критический угол атаки во всём диапазоне скоростей в корне всегда на 2,5 градуса меньше. Конечно, еще одним критерием при выборе профилей была используемая технология. Для обеспечения плотного прилегания бальзовой обшивки к нервюрам нецелесообразно использовать профили даже с небольшими вогнутостями, “продавить”, скорее всего, не получится, могут остаться “хлопуны”. Старался так же подобрать профили так, чтобы строительная высота по линии закрылок – элерон оставалась относительно постоянной либо изменялась как можно более линейно. Это упрощает изготовление отклоняемых поверхностей.










Пару слов необходимо сказать и про покрытие. Все свои предыдущие модели делал исключительно по классике – обтягивал специальными плёнками. Преимущества очевидны: простота, доступность, малый вес. Но есть и свои недостатки, главным из которых считаю потерю со временем “товарного вида”. Если модель просто висит на стенке, в помещении с относительно постоянным климатом, это проявляется не так явно, но если модель много летает, часто транспортируется, это становится заметно. Конечно, плёнку можно подтягивать, но, к большому сожалению, не до бесконечности, да и сам процесс достаточно кропотливый. Новый самолёт сделал иначе, поверх бальзовой обшивки положил слой тонкой стеклоткани (25 г/м^2) на паркетный двухкомпонентный быстросохнущий лак. Фото есть в этой статье. Сверху положил еще пару слоёв лака, затем тщательно вышкурил, и дунул акриловым грунтом из баллончика, чтобы скрыть оставшиеся неровности. После чего окончательно вышкурил. Затем покраска, и еще один слой лака для защиты покрытия и придания аппарату законченного вида.
Эта технология мне показалась более трудоёмкой и вес такого покрытия всё же раза в полтора - два больше традиционного. Зато внешний вид выше всяких похвал.
Что касается посадочной системы, многие FPV модели вовсе не имеют таковой и с успехом приземляются на брюхо. Очевидно, шасси, как и другие выступающие элементы, увеличивают Cx (коэффициент лобового сопротивления). Система их уборки добавляет вес. Мой вариант не исключение. Просто зашил контактное место 1,5 мм фанерой. Для любителей считать приведу простой расчет из школьного курса физики. Как известно E потенциальная = m*g*h, соответственно, к примеру, для механизма уборки шасси весом 200 грамм на высоте 1000 метров E потенц.= 1960 Дж. Как показывает практика КПД всей системы самолёт + мотор + винт и т.д. редко превышает 30%, поэтому на такой подъём потребуется потратить минимум 3*1960 = 5880 Дж энергии аккумулятора на борту. Е аккумулятора = U*C*3600. Подставляем наши данные получаем уравнение 5880 = 11,1*С*3600, отсюда С = 0,147 А*ч или 147 “лишних” миллиампер часов, с учетом того, что наш аккумулятор является 3-х баночным. Может такой дополнительный расход и не является очень существенным, но мысль о том, что когда-нибудь тебе не хватит этих самых 150 мАч вернуться домой, заставляет задуматься.


На одной из фотографий видно подвешенную под крылом ракету. И действительно это ни разу не муляж. Возможность установки на него дополнительного оборудования была предусмотрена заранее, в том числе и подобная опция. Ну не мог отказать себе в удовольствии чуток пошалить. Ниже 12-ти секундный ролик о том как это работает.
Жизнь у Касатика была конечно насыщенной и интересной, но к большому сожалению не долгой. Возвращаясь с очередного задания черт дернул пилота сажать визуально. Не рассчитав глиссаду увидел что пролетаю и самолёт сядет далеко… Принял роковое решение уйти на второй круг. Газу до отказу набор, 1-й разворот, 2-й, подлетаю к третьему, но слишком рано убираю газ. Начинаю левый вираж, скорости недостаточно и левая консоль срывается, подъёмная сила резко падает, Касатик делает полубочку и со всего маха с высоты метров 15-18 падает на лёд. Как сей час помню. Могу, конечно, найти видео, но пересматривать его, а тем более вешать на YouTube нет ни малейшего желания. Сердце кровью обливается. Посмотрим лучше на его грациозный полёт при возвращении домой и запомним его именно таким.
Но всё же думаю не вся вина за эту катастрофу лежит на пилоте, часть её безусловно нужно адресовать и конструктору, жаль что в данном конкретном случае оба они это одно и тоже лицо ))). На мой субъективный взгляд Касатик был красивый, интересный, быстрый, даже экстремальный, но чрезмерно тяжелый. И правда взлётный вес приблизительно 3500 грамм, и нагрузка порядка 120 г/дм^2 сделали своё грязное дело. Конечно, его можно было восстановить, но к тому моменту уже прекрасно понимал какие части в нем можно оптимизировать, а какие элементы попросту сделать иначе.
Опыт сын ошибок трудных, но именно он позволяет создавать подлинные шедевры. Чертёж был выполнен полностью заново. По новой собраны стапеля, и, в конце концов новый самолёт. Имя он получил от одной из самых сложных вершин для восхождения в Гималаях, гордое с тонким ароматом героизма, К2 ))).












На новом самолёте был увеличен размах (1740), хорды (корень 270, MM 1710/конец 190, MM 1711), крутка (-3), применены другие профиля, гораздо более несущие, но менее скоростные.. По другому реализовано крепление мотогондол на крыле. В отличие от Касатика К2 покрыт плёнкой. Электроника в авиакатастрофе не пострадала и всем скопом перекочевала на новый самолёт. При том, что самолёт стал больше, взлётный вес удалось сократить до 3250 грамм, а нагрузку на площадь снизить до 87 г/дм^2. Запускать аппарат стало значительно проще, экономичность так же возросла.
Отдельного упоминания заслуживают воздушные винты. На Касатке использовал пропеллеры 7х6, но тк К2 не такой скоростной лучшую эффективность показали винты 8*4. Моторы одни и те же 28*36, 1400 kv, 4S.
В прошлом году мы с друзьями ездили на Алтай. Именно К2 позволил реализовать давнюю мечту, полёты в горах. Места в машинах хватило и конечно своих любимчиков дома мы оставить никак не могли. Удалось полетать в районе Телецкого озера и в долине реки Бия. Самолёт с честью справился со всеми возложенными на него задачами, позволил посмотреть на красоты алтайской природы с удивительных ракурсов. Крайний полёт К2 совершил совсем недавно 09.09.2017. Коротенький фрагмент.
Выражаю огромную благодарность и признательность моему верному другу, помощнику, коллеге по хобби, неизменному спутнику, с которым всегда интересно и легко. Да Вася эту статью я посвящаю тебе.
Приступая к проектированию и постройке конкретной модели, уже имел достаточно большой опыт в FPV, совершил порядка 50 полётов. Построил два бальзовых мотопланера, крайний из которых эксплуатирую до сих пор. Зовут его Малыш. Правда последние годы он летает управляясь исключительно визуально (FPV оборудование с него снято), и только для показательных выступлений. Ниже их фото и короткий фрагмент полёта “строем”. Камера летит на Skywalker-е.


Имя для нового проекта как часто и бывает, пришло по ходу пьесы. Назвал я его Касатка.
Многие пилоты, увлеченные FPV, возможно считают, что главное в нашем деле это правильный подбор и настройка электроники (передатчик, приёмник, OSD, автопилот, LRS-ка, антенны)... И конечно они правы! Но всё же на первое место по степени важности я ставлю выбор носителя. Далее по пунктам:
1) Лётные качества. Планер медленный и вальяжный, на тот момент у меня уже был и на первое место вышли скоростные и пилотажные возможности. Очень хотелось построить аппарат поинтереснее. Имея опыт полётов, хорошо осознавал проблему ветра! Те, кто летает, меня поймут. А для остальных короткая справка… На высоте 500 метров ветер легко может быть 12 м/с, а это 43,2 км/ч, бывает и больше. Понятно, что если крейсерская скорость летательного аппарата составляет 60 км/ч (это, как показывает практика, хороший показатель), то путевая скорость или скорость по GPS будет уже….. каждый может посчитать сам. И это мы говорим только про случай горизонтального полёта. А в случае если хочется лететь набирая высоту, путевая скорость может стать даже отрицательной, соответственно аппарат будет двигаться попой вперёд. Как много раз мы это проходили…
2) Внешний вид. В статье про биплан написал подробно, здесь замечу лишь, что если эксплуатируешь красивый деревянный или пластиковый самолёт начинаешь гораздо ответственнее относиться ко всему комплексу оборудования в целом. Более тщательно выбираешь погоду, площадку для полётов, проверяешь оборудование по 10 раз. Естественно это позитивно сказывается на количестве авиационных происшествий и предпосылок к ним.
3) Удобство транспортировки на поле. Мои модели живут, как ни странно, в моделке, но в собранном состоянии (висят под потолком). Планер Малыш имеет размах 2640 мм, и он достаточно сложен в сборке – разборке, поэтому в летний сезон, когда на лётное поле приходилось выезжать, он летал относительно редко (8-10 раз), зато зимой замерзает озеро и ехать никуда не нужно. Новый носитель хотел сделать максимально легко разборным, действительно, что может быть проще, чем просто открутить одно цельное крыло (2 пластиковых болта) и отцепить 5 разъёмов?! По поводу цельного крыла вопрос дискуссионный, но собрал именно так ибо ИМХО так легче, надёжнее, прочнее и нет никаких проблем в транспортировке одной цельной детали длиной 1590 мм.
4) Скорость сборки - разборки на месте. Это относиться как к самому аппарату, так и комплексу наземного оборудования. На поле может случиться всякое. Например, может прийти грозовой фронт с порывами ветра под 20 м/с, дождём, а иногда и не только. Если обычную авиамодель можно посадить быстро, то FPV может находиться достаточно далеко, соответственно время её возвращения домой может составлять 10-ки минут и более. Кто – то скажет: “Смотри прогноз погоды”. Естественно смотрим, в обязательном порядке, но как показывает практика, неожиданности случаются.
5) Простота размещения и доступа ко всей необходимой аппаратуре. Поскольку речь идет о носителе FPV, оборудования на таких самолётах много больше, чем на моделях управляемых визуально. Если не продумать всё заранее задача его размещения и последующего к нему доступа будет немногим проще чем у авто слесаря решившего перебрать двигатель через выхлопную трубу. Критически важно при этом разместить оборудование так, чтобы исключить или свести к минимуму взаимное негативное влияние компонентов системы друг на друга (многие знают, например, о влиянии излучения видео передатчика на работу некоторых видов серво машинок, также оно влияет со знаком “-” и на приёмник управления и на приёмник GPS).
Приведенных размышлений мне было достаточно, чтобы сесть за чертежи, попробовать спроектировать, а затем и построить “идеальный” носитель под свои задачи:
1) Более одного мотора. Таким образом обеспечивается большая надёжность ибо два мотора это еще и два пропеллера, два регулятора, два бека и тд.
2) Крейсерская скорость 80 - 90 км/ч.
3) Допустимая перегрузка +10 - 6 g. Возможность пилотаж покрутить. Объясню откуда взялись эти самые 10 единиц. Анализируя видео предыдущих полётов, нашел момент с выполнением мёртвой петли. Скорость на входе была 175 км/ч, а её диаметр по показаниям GPS (от момента начала вращения до верхней точки) 32 метра. Таким образом, перегрузка составила (V^2/R/9,8) 48,61м/с^2 / 16м / 9,8 = 15,06 ед.!!! Конечно эта цифра является приблизительной, ибо GPS работает с задержкой, да и упомянутый ветер внёс свои коррективы, но представление получить такой расчет позволяет.
4) Дальность полёта 15+ км. За счет скорости это не так много 10-12 минут в одну сторону, но ведь можно и “топнуть”.
5) Продолжительность полёта 30+ минут. Думаю, многие со мной согласятся, полёт в таком режиме особенно на низкой высоте это работа, реально устаёшь.
6) Возможность установки дополнительного оборудования. Фары для посадки в тёмное время суток, пиротехника (ракеты, дымы) для авиа шоу, камеры высокого разрешения.
7) Сделать аппарат максимально “не срывным” и с относительно большим диапазоном скоростей, чтобы при такой крейсерской скорости, посадочная оставалась в разумных приделах (40+- км/ч) и взлёт мог легко происходить с руки, без использования катапульты или ракетных ускорителей.
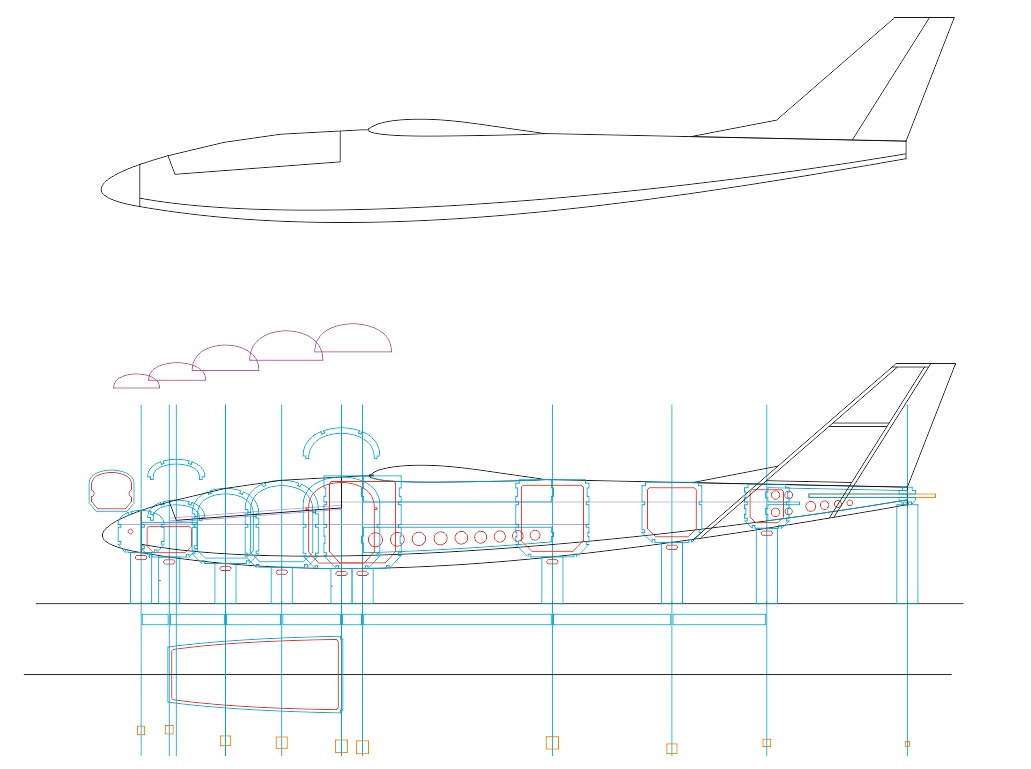
Чертежи были выполнены в CorelDRAW, т.е. 3D моделирование не применялось. Оказывается, технологии позволяют использовать подобный чертёж для лазерной резки, что и было с успехом выполнено. Все шпангоуты, нервюры, подставки, полки лонжерона, даже косынки нервюр, а главное оба стапеля (и для крыла и для фюзеляжа) всё было вырезано на таком чудесном станке. Точность при этом разумеется выше всяких похвал.
Предлагаю Вашему вниманию серию фотографий, иллюстрирующих процесс его создания. Описывать весь процесс, думаю, нецелесообразно. Для многих думаю, и так будет всё понятно, а остальные вполне могу удовлетворить свой интерес в комментариях. Естественно постараюсь на все ответить.






Хотел бы отдельно остановиться на этапе проектирования крыла. На данном аппарате применил сочетание геометрической и аэродинамических круток, всё по взрослому. Для построения поляр, выбора профилей, их сравнения и анализа пользовался программой Profili 2.0, также она позволяет построить нервюры, включая промежуточные и сохранить их в формате dfx, который в свою очередь с удовольствием “кушает” упомянутый CorelDRAW. Программа действительно замечательная, но дабы не превращать своё повествование в учебник в этой статье основы работы с ней решил не рассматривать. Все, кому интересно, легко могут самостоятельно её скачать и разобраться. Использованы два профиля: корневой MM 1995 хорда 250 мм и концевой NACA 0013 хорда 170 мм, геометрическая крутка -2 градуса. Критический угол атаки во всём диапазоне скоростей в корне всегда на 2,5 градуса меньше. Конечно, еще одним критерием при выборе профилей была используемая технология. Для обеспечения плотного прилегания бальзовой обшивки к нервюрам нецелесообразно использовать профили даже с небольшими вогнутостями, “продавить”, скорее всего, не получится, могут остаться “хлопуны”. Старался так же подобрать профили так, чтобы строительная высота по линии закрылок – элерон оставалась относительно постоянной либо изменялась как можно более линейно. Это упрощает изготовление отклоняемых поверхностей.










Пару слов необходимо сказать и про покрытие. Все свои предыдущие модели делал исключительно по классике – обтягивал специальными плёнками. Преимущества очевидны: простота, доступность, малый вес. Но есть и свои недостатки, главным из которых считаю потерю со временем “товарного вида”. Если модель просто висит на стенке, в помещении с относительно постоянным климатом, это проявляется не так явно, но если модель много летает, часто транспортируется, это становится заметно. Конечно, плёнку можно подтягивать, но, к большому сожалению, не до бесконечности, да и сам процесс достаточно кропотливый. Новый самолёт сделал иначе, поверх бальзовой обшивки положил слой тонкой стеклоткани (25 г/м^2) на паркетный двухкомпонентный быстросохнущий лак. Фото есть в этой статье. Сверху положил еще пару слоёв лака, затем тщательно вышкурил, и дунул акриловым грунтом из баллончика, чтобы скрыть оставшиеся неровности. После чего окончательно вышкурил. Затем покраска, и еще один слой лака для защиты покрытия и придания аппарату законченного вида.
Эта технология мне показалась более трудоёмкой и вес такого покрытия всё же раза в полтора - два больше традиционного. Зато внешний вид выше всяких похвал.
Что касается посадочной системы, многие FPV модели вовсе не имеют таковой и с успехом приземляются на брюхо. Очевидно, шасси, как и другие выступающие элементы, увеличивают Cx (коэффициент лобового сопротивления). Система их уборки добавляет вес. Мой вариант не исключение. Просто зашил контактное место 1,5 мм фанерой. Для любителей считать приведу простой расчет из школьного курса физики. Как известно E потенциальная = m*g*h, соответственно, к примеру, для механизма уборки шасси весом 200 грамм на высоте 1000 метров E потенц.= 1960 Дж. Как показывает практика КПД всей системы самолёт + мотор + винт и т.д. редко превышает 30%, поэтому на такой подъём потребуется потратить минимум 3*1960 = 5880 Дж энергии аккумулятора на борту. Е аккумулятора = U*C*3600. Подставляем наши данные получаем уравнение 5880 = 11,1*С*3600, отсюда С = 0,147 А*ч или 147 “лишних” миллиампер часов, с учетом того, что наш аккумулятор является 3-х баночным. Может такой дополнительный расход и не является очень существенным, но мысль о том, что когда-нибудь тебе не хватит этих самых 150 мАч вернуться домой, заставляет задуматься.


На одной из фотографий видно подвешенную под крылом ракету. И действительно это ни разу не муляж. Возможность установки на него дополнительного оборудования была предусмотрена заранее, в том числе и подобная опция. Ну не мог отказать себе в удовольствии чуток пошалить. Ниже 12-ти секундный ролик о том как это работает.
Жизнь у Касатика была конечно насыщенной и интересной, но к большому сожалению не долгой. Возвращаясь с очередного задания черт дернул пилота сажать визуально. Не рассчитав глиссаду увидел что пролетаю и самолёт сядет далеко… Принял роковое решение уйти на второй круг. Газу до отказу набор, 1-й разворот, 2-й, подлетаю к третьему, но слишком рано убираю газ. Начинаю левый вираж, скорости недостаточно и левая консоль срывается, подъёмная сила резко падает, Касатик делает полубочку и со всего маха с высоты метров 15-18 падает на лёд. Как сей час помню. Могу, конечно, найти видео, но пересматривать его, а тем более вешать на YouTube нет ни малейшего желания. Сердце кровью обливается. Посмотрим лучше на его грациозный полёт при возвращении домой и запомним его именно таким.
Но всё же думаю не вся вина за эту катастрофу лежит на пилоте, часть её безусловно нужно адресовать и конструктору, жаль что в данном конкретном случае оба они это одно и тоже лицо ))). На мой субъективный взгляд Касатик был красивый, интересный, быстрый, даже экстремальный, но чрезмерно тяжелый. И правда взлётный вес приблизительно 3500 грамм, и нагрузка порядка 120 г/дм^2 сделали своё грязное дело. Конечно, его можно было восстановить, но к тому моменту уже прекрасно понимал какие части в нем можно оптимизировать, а какие элементы попросту сделать иначе.
Опыт сын ошибок трудных, но именно он позволяет создавать подлинные шедевры. Чертёж был выполнен полностью заново. По новой собраны стапеля, и, в конце концов новый самолёт. Имя он получил от одной из самых сложных вершин для восхождения в Гималаях, гордое с тонким ароматом героизма, К2 ))).












На новом самолёте был увеличен размах (1740), хорды (корень 270, MM 1710/конец 190, MM 1711), крутка (-3), применены другие профиля, гораздо более несущие, но менее скоростные.. По другому реализовано крепление мотогондол на крыле. В отличие от Касатика К2 покрыт плёнкой. Электроника в авиакатастрофе не пострадала и всем скопом перекочевала на новый самолёт. При том, что самолёт стал больше, взлётный вес удалось сократить до 3250 грамм, а нагрузку на площадь снизить до 87 г/дм^2. Запускать аппарат стало значительно проще, экономичность так же возросла.
Отдельного упоминания заслуживают воздушные винты. На Касатке использовал пропеллеры 7х6, но тк К2 не такой скоростной лучшую эффективность показали винты 8*4. Моторы одни и те же 28*36, 1400 kv, 4S.
В прошлом году мы с друзьями ездили на Алтай. Именно К2 позволил реализовать давнюю мечту, полёты в горах. Места в машинах хватило и конечно своих любимчиков дома мы оставить никак не могли. Удалось полетать в районе Телецкого озера и в долине реки Бия. Самолёт с честью справился со всеми возложенными на него задачами, позволил посмотреть на красоты алтайской природы с удивительных ракурсов. Крайний полёт К2 совершил совсем недавно 09.09.2017. Коротенький фрагмент.
Выражаю огромную благодарность и признательность моему верному другу, помощнику, коллеге по хобби, неизменному спутнику, с которым всегда интересно и легко. Да Вася эту статью я посвящаю тебе.













Есть еще много моделей, и не только FPV, о которых можно было бы рассказать. Повесить чертежи непосредственно для резки лазером с подробным описанием процесса изготовления. В планах написать обстоятельную статью про антенны и вообще весь комплекс дополнительно оборудования, про используемый мной способ подбора пропеллеров, про детские проекты которые они строят в кружке под чутким руководством.
Жаль, но сообщество и правда сжимается, с чем бы это могло быть связанно? вопрос риторический…
Не подскажите, какое OSD используете?
Приведу список тех, которые изучил сам, но думаю гугл способен ответить на Ваш вопрос более полно.
(LIFTROLLCOOKBOOK.doc)
(Аэродинамикалетающихкрыльев.doc)
(Винглеты.doc)
(Геометриякрыла.doc)
(Летательныеаппаратынетрадиционныхсхем.doc)
(Определениегеометрическихразмеровкрыла.doc)
(Особенностисамолетовсдвумякрыльями.doc)
(Почемуптицылетаюталошадинет.doc)
(Профилькрыла.doc)
(Профиляформыкрылавпланеикруткикрыла.doc)
(Самыйлучшийпрофиль.doc)
(Тренердляактивных.doc)
(ЧтотакоечислоРейнольдса.doc)
Дерзайте, дорогу осилит идущий…
V=4*(p/Cy)^(1/2) *
где р – нагрузка на крыло
можно определить для крейсерской скорости по поляре модели установочный угол крыла.
Крыло с аэродинамической круткой - гораздо более трудный случай, и построение поляры для этого крыла в популярной литературе для авиамоделистов не рассматривается.
Я строил то же крыло с аэродинамической круткой, но как построить поляру к такому крылу не знаю.
С уважением Николай Булгаков.
* В.Л. Готтесман
Летающие модели самолетов
Киев. 1950 г.
Скорее всего дело в максимальной степени в толщине профиля, тонкий срывается резко.
Вот мой аппарат - полукопия американского T-28D5, 1400 мм размах, нагрузка 110 гр./дм2.
На седьмой минуте я убрал полностью газ и взял ручку полностью на себя. На видео видна тряска аппарата, при этом он продолжает управляться по крену, теряет высоту, но держит скорость планирования сам. Отсутствие сваливания на консоль - очень толстый профиль крыла.
Но чем меньше нагрузка, тем лучше. Конечно более 100 грамм на дм2 не стоит делать. :)