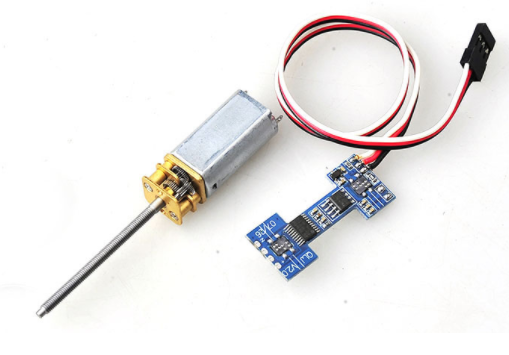
Недавно заказал пару мотор-редукторов и ломал голову какой контроллер использовать для конечных положений.Некоторые используют самодельные программируемые контроллеры ,что не каждый может повторить в виду сложности конструкции требующий контроллер прошивки микросхем и соответствующие знания электроники . Пришла идея использовать в качестве контроллера сервы с пластмассовыми шестернями лишившиеся зубов ,думаю такие всегда найдутся у моделистов.
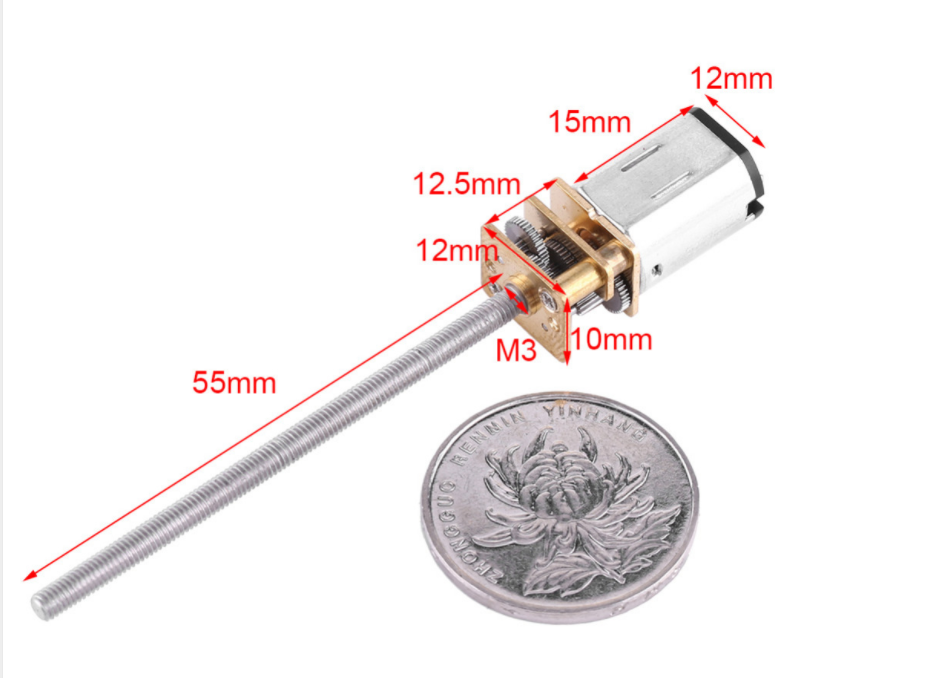
Такие сервы я и предлагаю использовать в качестве контроллера совместно в паре с мотор-редукторами китайского производства , используя их как контроллер конечных положений в самодельных ретрактах или механизмах выпуска закрылок и т.п. https://ru.aliexpress.com/item/DC-6V-30RPM-500RPM-Electric-Gear-Motor-Mini-Electrical-Reduction-Motor-Gear-Box-Accessories/32815739914.html?spm=a2g0s.9042311.0.0.jXsCIL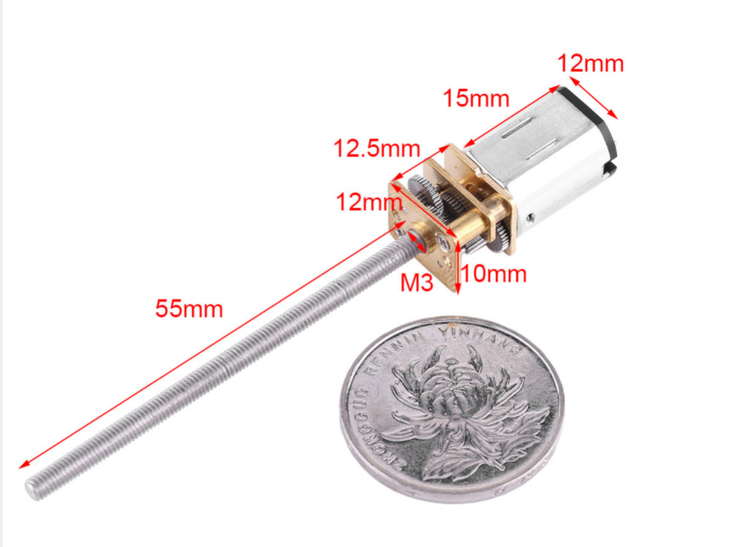
Такие сервы я и предлагаю использовать в качестве контроллера совместно в паре с мотор-редукторами китайского производства , используя их как контроллер конечных положений в самодельных ретрактах или механизмах выпуска закрылок и т.п. https://ru.aliexpress.com/item/DC-6V-30RPM-500RPM-Electric-Gear-Motor-Mini-Electrical-Reduction-Motor-Gear-Box-Accessories/32815739914.html?spm=a2g0s.9042311.0.0.jXsCIL
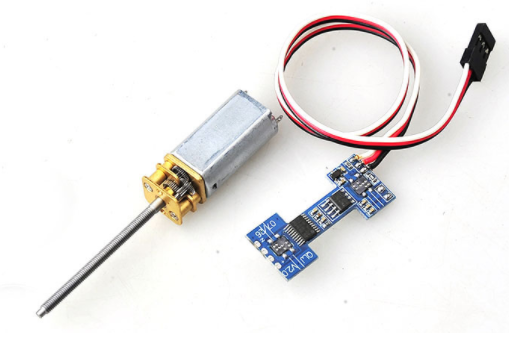
В продаже бывают мотор редукторы с контроллером без описания , видимо на плате контроллер имеет конечные выключатели как в самолетных ретрактах. Стоимость их выше и описания нет.
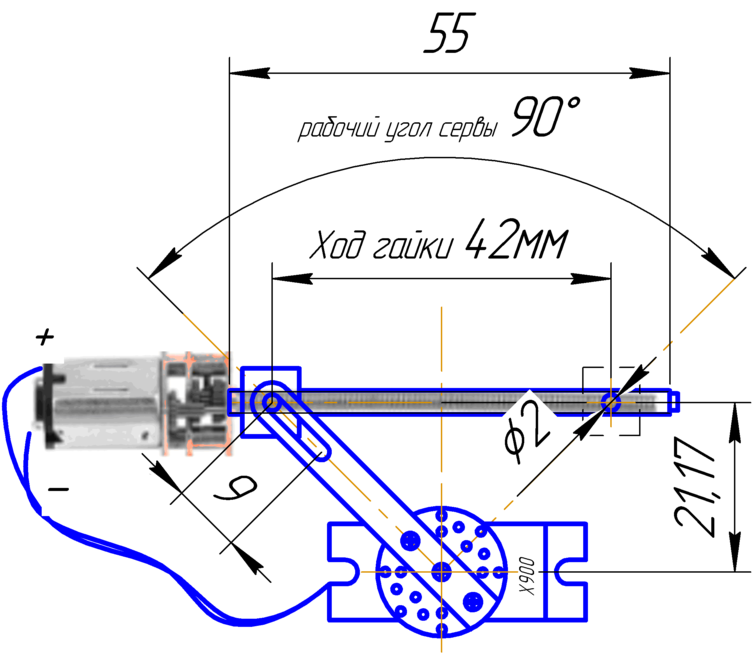
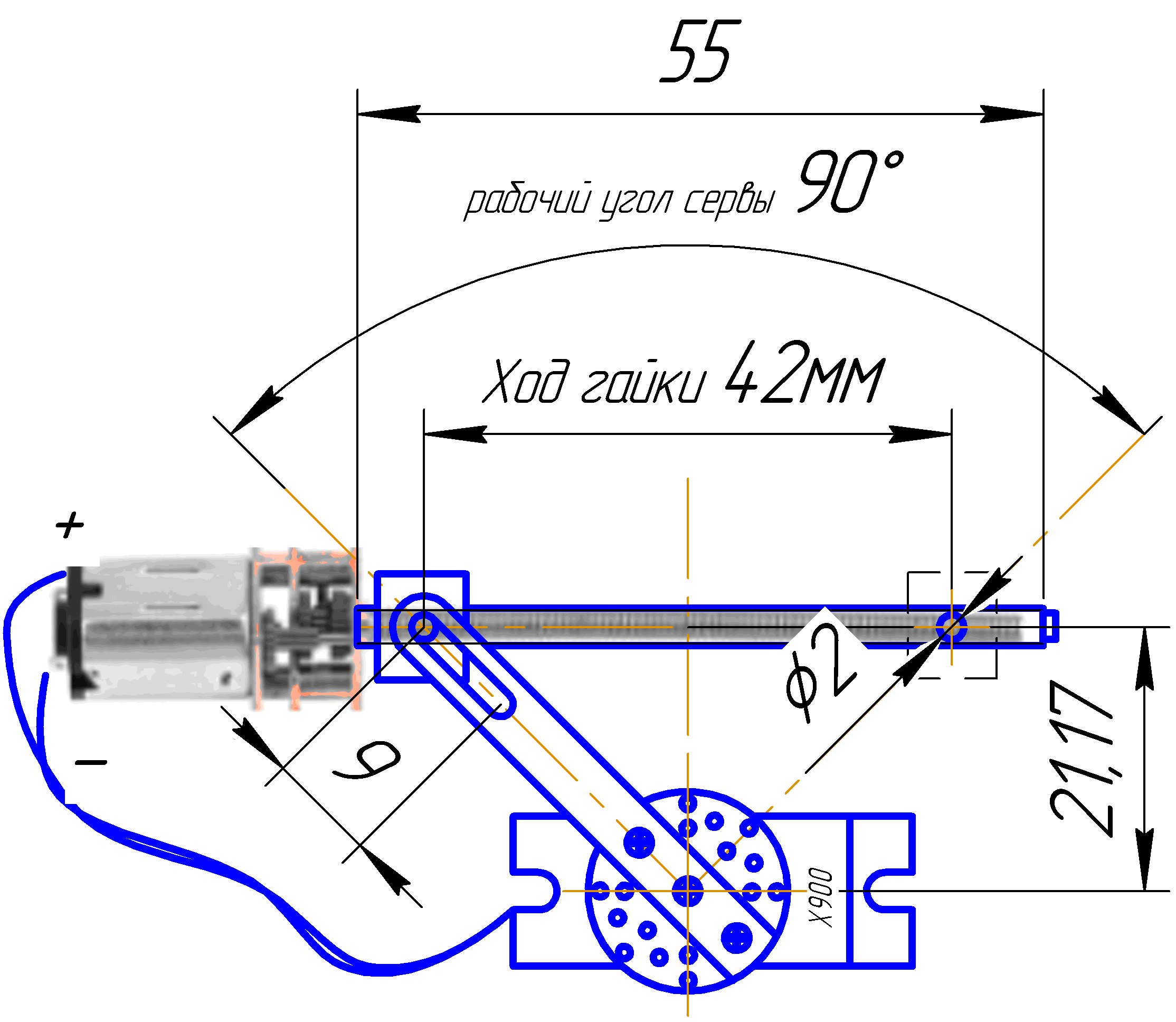
У всех сервоприводов, если их используют на свободном тумблере для выпуска шасси, рабочий угол составляет 90 градусов без регулировки конечных точек (в обычном режиме на рулевых поверхностях этот угол +/- 35градусов относительно среднего положения и конечне точки выставляются на пульте ).
Для использования сервы с поломанными шестернями необходимо разобрать серву , отпаять провода с контроллера идущие к электродвигателю и заменить их на более длинные . Штатный электродвигатель удалить , а так же все промежуточные шестерни , кроме основной под качалку( как правило на ней и выбиваются пластиковые зубцы) , сама шестерня надета на ось переменного резистора . Собираем облегченную серву и выводим из неё удлиненные провода.
Поверх штатной качалки сервы крепим самодельную удлиненную качалку(из стеклотекстолита ,аллюминия ) с пазом под ось на ходовой гайке редуктора (гайка самодельная М3 или ось с отверстием М3- как на промышленных ретрактах ).
Удлиненные провода припаиваем к мотор-редуктору . Вот и все устройство , останется раскрепить все на фундаменте паралельно друг другу.
Можно конечно осуществлять привод проволочной тягой с гайки винта напрямую к штатной качалке, если лимитирует расположение или габариты устройства .
Качалка фактически не испытывает никаких нагрузок ,главное что бы зазоры в сопряжениях были минимальны дабы не было дребезга машинки.
Кинематическую схему привожу ниже.Фактически сломанную редукторную схему сервы я вынес наружу не меняя принципа работы самой сервы .
Фото и видео конструкций пока нет , посылка пока в пути.
Надеюсь идея моделистам пригодится.
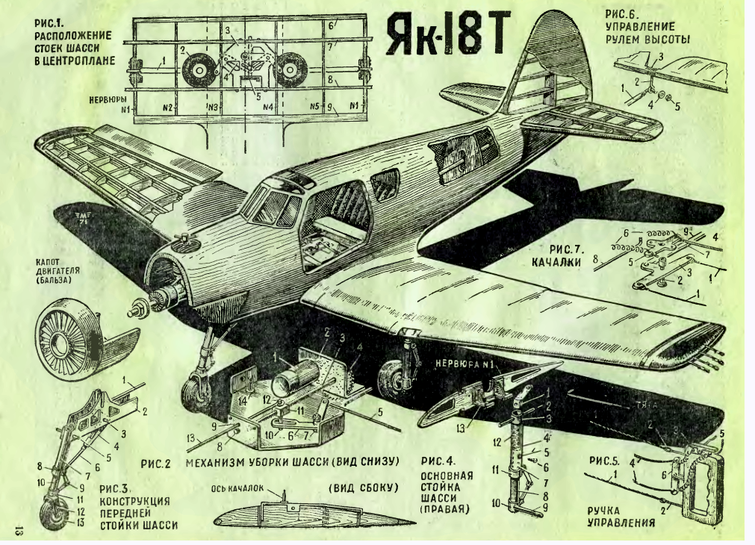
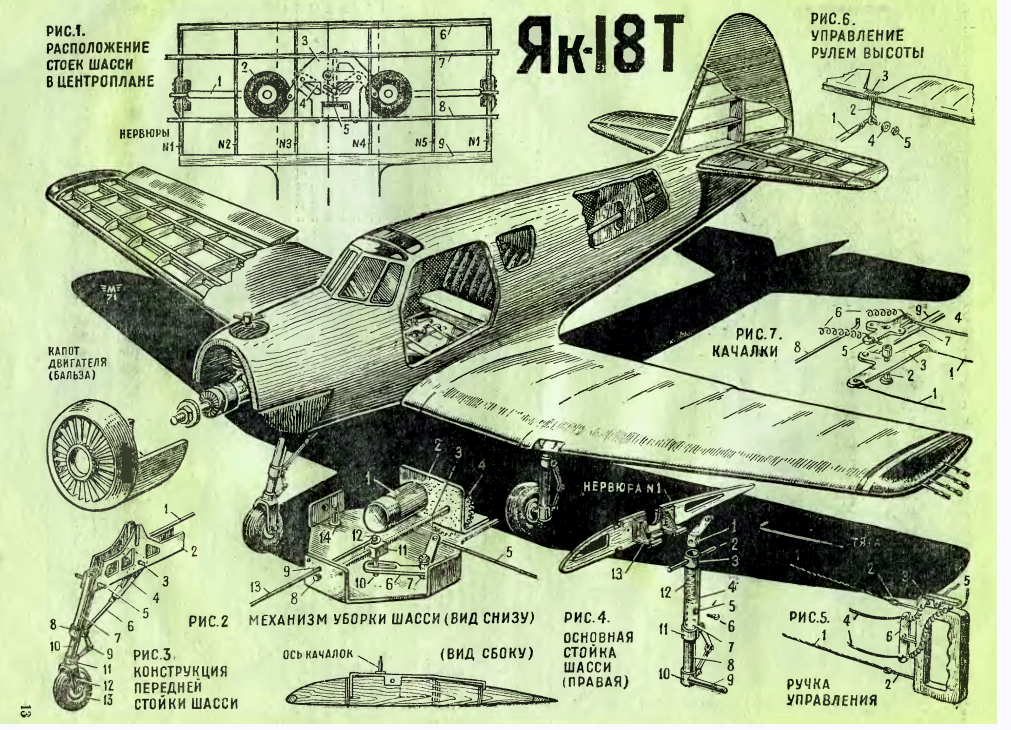
Один такой винтовой редуктор можно например применить сразу для уборки всех стоек шасси ,как например в самодельном механизме уборки шасси описанном в журнале Моделист-Конструктор №7 1971г.(Моделист-Конструктор197107.djvu)
У всех сервоприводов, если их используют на свободном тумблере для выпуска шасси, рабочий угол составляет 90 градусов без регулировки конечных точек (в обычном режиме на рулевых поверхностях этот угол +/- 35градусов относительно среднего положения и конечне точки выставляются на пульте ).
Для использования сервы с поломанными шестернями необходимо разобрать серву , отпаять провода с контроллера идущие к электродвигателю и заменить их на более длинные . Штатный электродвигатель удалить , а так же все промежуточные шестерни , кроме основной под качалку( как правило на ней и выбиваются пластиковые зубцы) , сама шестерня надета на ось переменного резистора . Собираем облегченную серву и выводим из неё удлиненные провода.
Поверх штатной качалки сервы крепим самодельную удлиненную качалку(из стеклотекстолита ,аллюминия ) с пазом под ось на ходовой гайке редуктора (гайка самодельная М3 или ось с отверстием М3- как на промышленных ретрактах ).
Удлиненные провода припаиваем к мотор-редуктору . Вот и все устройство , останется раскрепить все на фундаменте паралельно друг другу.
Можно конечно осуществлять привод проволочной тягой с гайки винта напрямую к штатной качалке, если лимитирует расположение или габариты устройства .
Качалка фактически не испытывает никаких нагрузок ,главное что бы зазоры в сопряжениях были минимальны дабы не было дребезга машинки.
Кинематическую схему привожу ниже.Фактически сломанную редукторную схему сервы я вынес наружу не меняя принципа работы самой сервы .
Фото и видео конструкций пока нет , посылка пока в пути.
Надеюсь идея моделистам пригодится.
Один такой винтовой редуктор можно например применить сразу для уборки всех стоек шасси ,как например в самодельном механизме уборки шасси описанном в журнале Моделист-Конструктор №7 1971г.(Моделист-Конструктор197107.djvu)













А прикидывал, какие обороты редуктора лучше брать?
В любом случае ждем продолжения.
При стандартном шаге 0,5мм что бы пройти 42мм потребуется 84 оборота вала , или 10секунд при 500 об/мин.
Редукторы такого типа стоят в промышленных ретрактах ,90 градусов преодалевают за 1-2секунды . некоторые моделисты ставят электронные замедлители для реальности уборки шасси( http://forum.rcdesign.ru/f8/thread23230.html )
на Паркфлаере имеется контроллер к таким ретрактам
, те что продают с контроллером (он с конечными выключателями, видимо на замену сгоревшим ), технических характеристики то же не приводят.
http://nazya.com/free/product/worm-motor-and-motor-controller-module-for-retractable-landing-gear-diy_960337.html
" Да, были люди в наше время, Не то, что нынешнее племя..." ©
А по основной теме - а не лучше ли использовать только плату контроллера с сервомашинки, а потенциометр взять линейный, как на пультах-микшерах музыкальных ?
Вес ползункового потенциометра с креплением будет больше чем сервомашинка , что бы сдвинуть ползунок потребуется часть мощности привода .
Как правило ползунковые потенциометры имеют меньший ресурс и плохо работают (например в магнитофонах когда-то в молодости был у меня м/ф Комета 212 и усилителях с эквалайзером )так как страдатют от пыли и плохо контачат, так как резестивная дорожка открытого типа и на контакты которые в специальной смазке налипает малейшая пыль :как следствие аккустические шорохи и скрипы в динамиках.