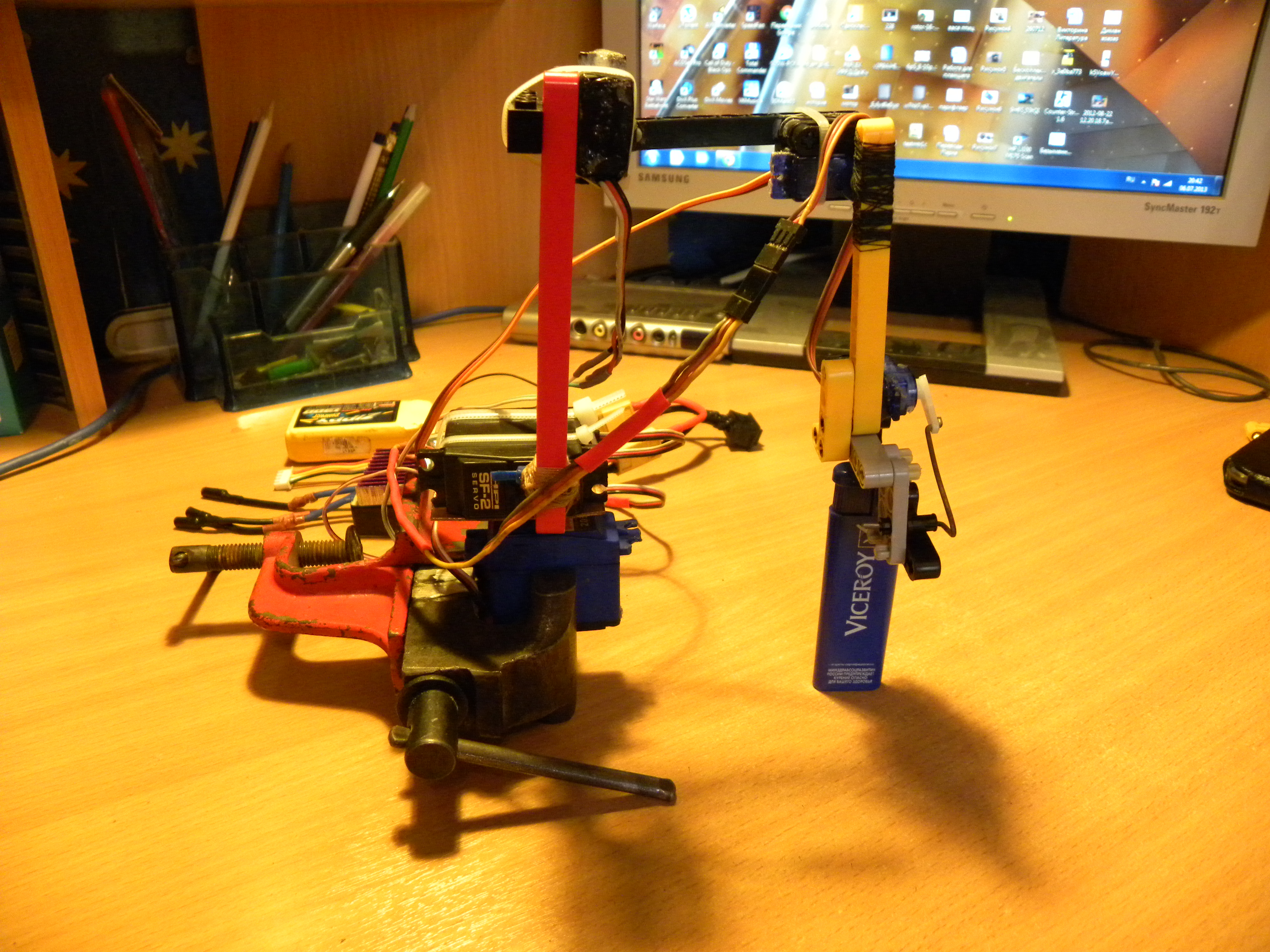
Решил сделать роборуку из страго и любимого LEGO=) Я соорудил конструкцию; она предпологала использование 5 движений (5 сервоприводов). Самый мощный и сильный редуктор я поставил на самый тяжелый участок: плечевой сустав.


Вот по примеру этого видео я захотел сделать роборуку:
Роборука относится к рубрике робототехника. Ранее я писал об этой теме http://www.parkflyer.ru/59961/blogs/view_entry/1421/ и в конце пообещал продвинутся в этом деле дальше.

Некоторые изменения:
Во-первых, я уменьшил конструкцию, чтобы все облегчить.
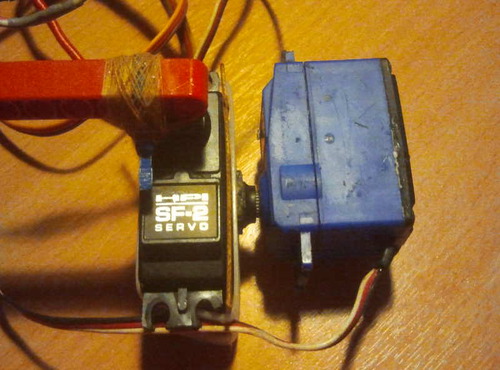
Во-вторых, вместо редукторов я использовал разнообразные сервоприводы.
В-третьих, для управления я воспользовался 6 канальной аппаратурой (Р/аппаратура Turnigy 6X FHSS 2.4ghz (Mode 2) (передатчик+приемник)). Примечательно то, что управление получилось довольно удобным.
Хитрости:
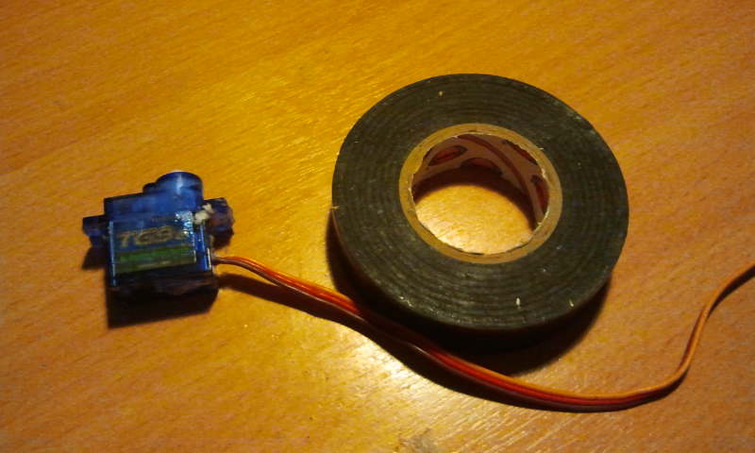
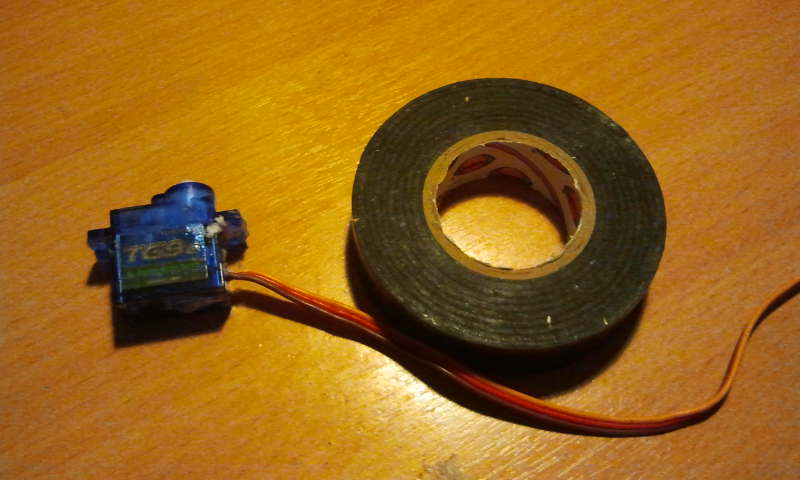
1) Чтобы собрать руку, я клеил длинные детальки LEGO к сервоприводам, но чтобы не портить клеем сервопривод, я предварительно залепил их изолентой.
2) Плечи сервоприводов я тоже приклеивал к деталькам от LEGO, но одного клея мало, и поэтому я еще наматывал место склеивания ниткой с цианокринином и еще хомутиками.

В итоге вот что получилось:
1) Механизм плеча руки:
2) Механизм локтя руки:

3) Механизм кисти руки:

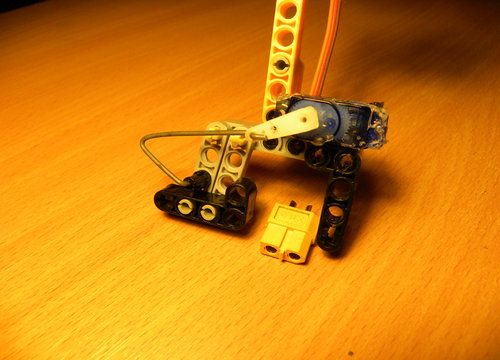
4) Механизм захвата руки:
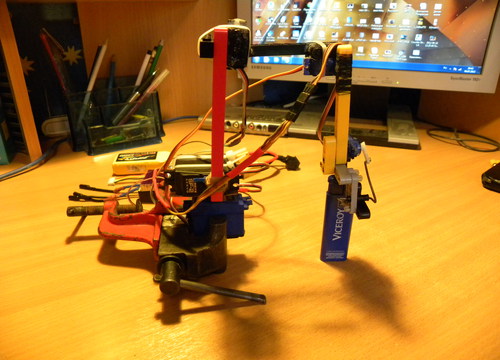
5) Вся рука в сборе:
Испытания:
1) Управление роборуки:
2) Работа в действии:
Выводы:
1) Надо избавиться от дрожания руки (использовать мощные сервоприводы с металлическим редуктором).
2) Вместо LEGO использовать алюминевые лаги.
3) Красиво и аккуратно все оформить.
Спасибо за внимание!)
Роборука относится к рубрике робототехника. Ранее я писал об этой теме http://www.parkflyer.ru/59961/blogs/view_entry/1421/ и в конце пообещал продвинутся в этом деле дальше.
Некоторые изменения:
Во-первых, я уменьшил конструкцию, чтобы все облегчить.
Во-вторых, вместо редукторов я использовал разнообразные сервоприводы.
В-третьих, для управления я воспользовался 6 канальной аппаратурой (Р/аппаратура Turnigy 6X FHSS 2.4ghz (Mode 2) (передатчик+приемник)). Примечательно то, что управление получилось довольно удобным.
Хитрости:
1) Чтобы собрать руку, я клеил длинные детальки LEGO к сервоприводам, но чтобы не портить клеем сервопривод, я предварительно залепил их изолентой.
2) Плечи сервоприводов я тоже приклеивал к деталькам от LEGO, но одного клея мало, и поэтому я еще наматывал место склеивания ниткой с цианокринином и еще хомутиками.

В итоге вот что получилось:
1) Механизм плеча руки:
2) Механизм локтя руки:
3) Механизм кисти руки:

4) Механизм захвата руки:
5) Вся рука в сборе:
Испытания:
1) Управление роборуки:
2) Работа в действии:
Выводы:
1) Надо избавиться от дрожания руки (использовать мощные сервоприводы с металлическим редуктором).
2) Вместо LEGO использовать алюминевые лаги.
3) Красиво и аккуратно все оформить.
Спасибо за внимание!)













Например стики могут управлять скоростью отклонения серв, а не их положение. Увеличится плавность и точность позиционирования.
Не нужно напрямую части руки клеить к машинке!)
Нужно передавать движения через рычаги!!!!)