Покупка краулера Himoto/HSP Kulak 1/18 (клон краулера от Losi) была самой обдуманой. Мысли вроде: "потом доработаю", вообще не допускались. Критерии выбора были просты: 1) масштаб до 16-го (но не микро); 2) бюджетность; 3) способность модели использовать максимум пространства комнаты (indoor only); 4) надёжность. Цель - "покататься" пока другая техника в ремонте/производстве и начать приобщать сына к моделизму.

Первый же заезд принёс только разочарование. Модель являлась вездеходом, но не краулером. То есть подъём в гору был возможен, если в качестве горки использовалась ровная доска с шершавой поверхностью, а угол наклона не более 45 градусов. Машина стремилась всё время завалиться на бок или сделать кувырок. Даже на ровной поверхности движение сопровождалось скручиванием рамы относительно мостов.
Детальное изучение конструкции выявило следующие основные недостатки, являющиеся следствием бюджетности:
- высокий центр тяжести из-за расположенной в самом верху электроники и батареи
- слишком большие углы в карданах, приводящие к скручиванию мостов
- "дубовая" резина со сцепными свойствами пластмассы
- большой радиус разворота, который сильно осложнял маневрирование на пересечёнке
В итоге свободное время тратил не на покатушки, а на модернизацию и поиск оптимального решения.
Задачей было улучшение проходимости без дополнительных вложений (только с использованием имеющихся материалов и комплектующих). Варианты с использованием независимого распределения крутящего момента между мостами и изменяемой геометрией подвесок не рассматривались.
Пропущу все промежуточные этапы, среди которых были перенос батареи на передний мост и установка стабилизаторов.
Начнем.
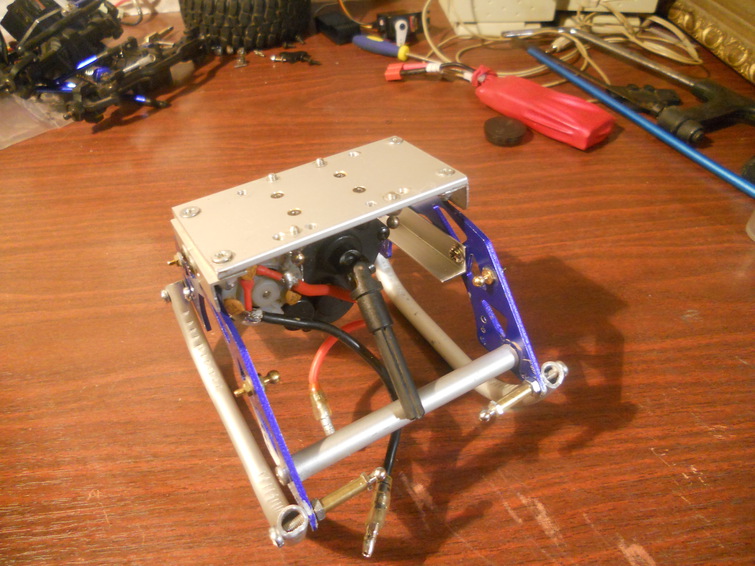
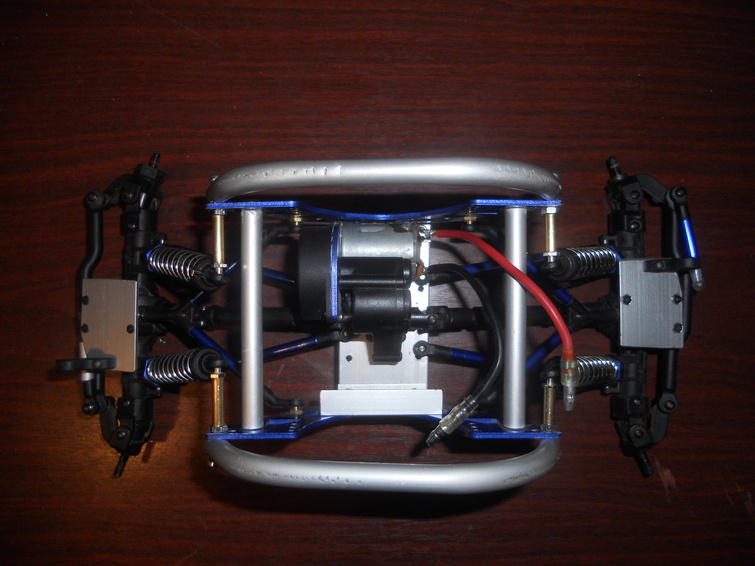
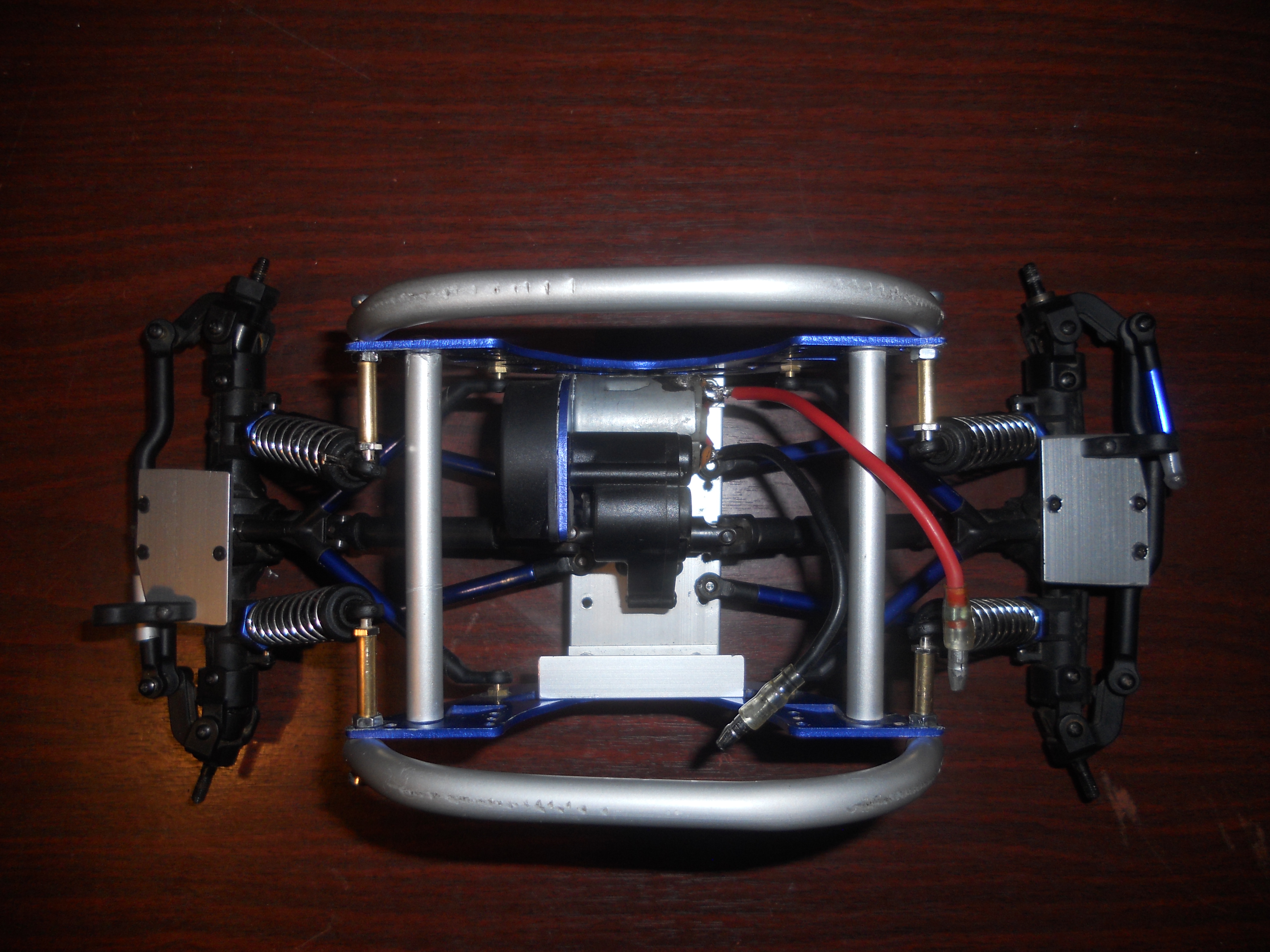
Стремление модели свернуться в спираль лечилось смещением раздатки таким образом, чтобы выходные валы приводов располагались в одной вертикальной плоскости вместе с карданами мостов (т.е. в центре рамы). Это привело к уменьшению углов в карданах и как следствие уменьшение скручивающего момента.
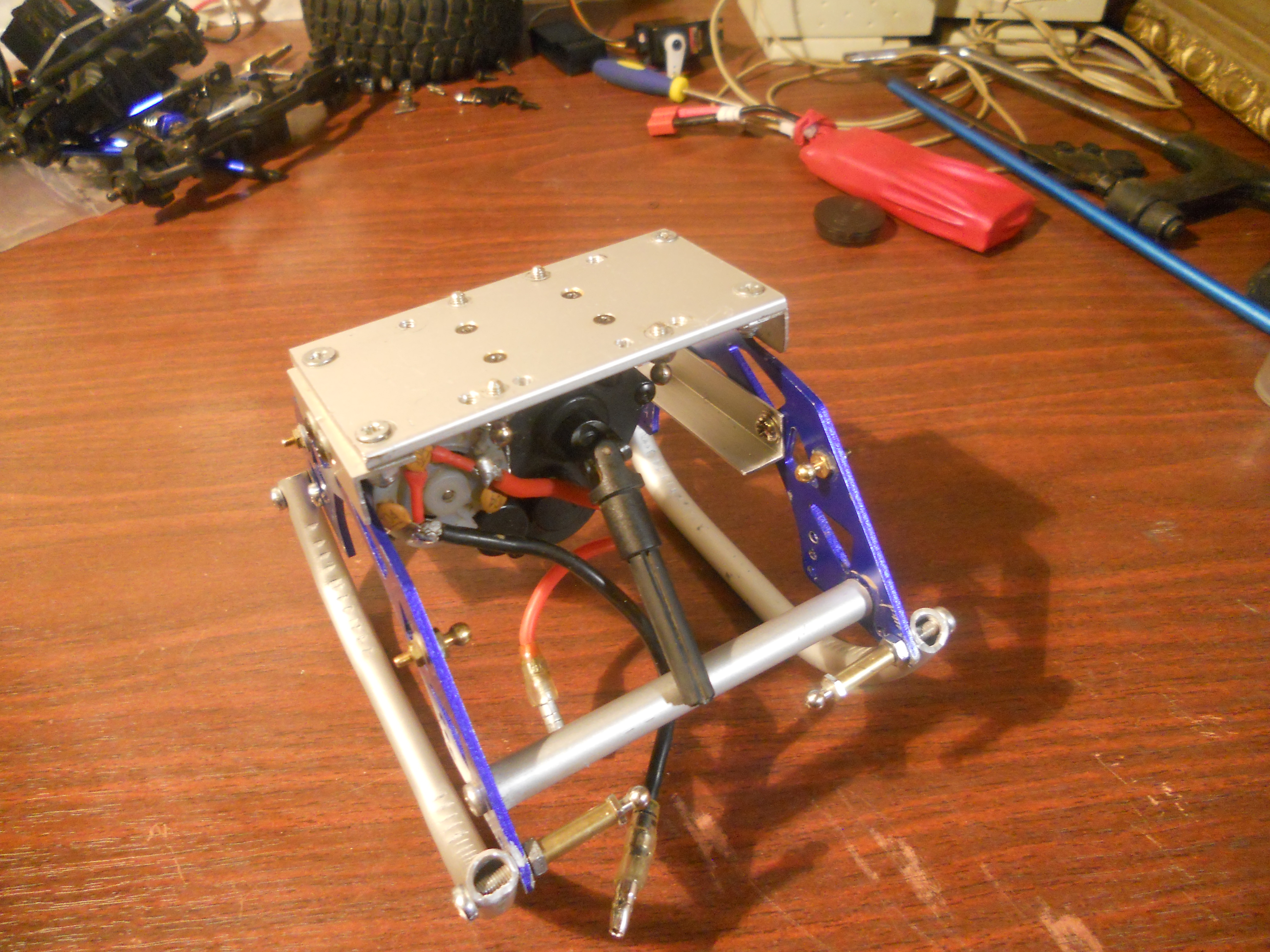
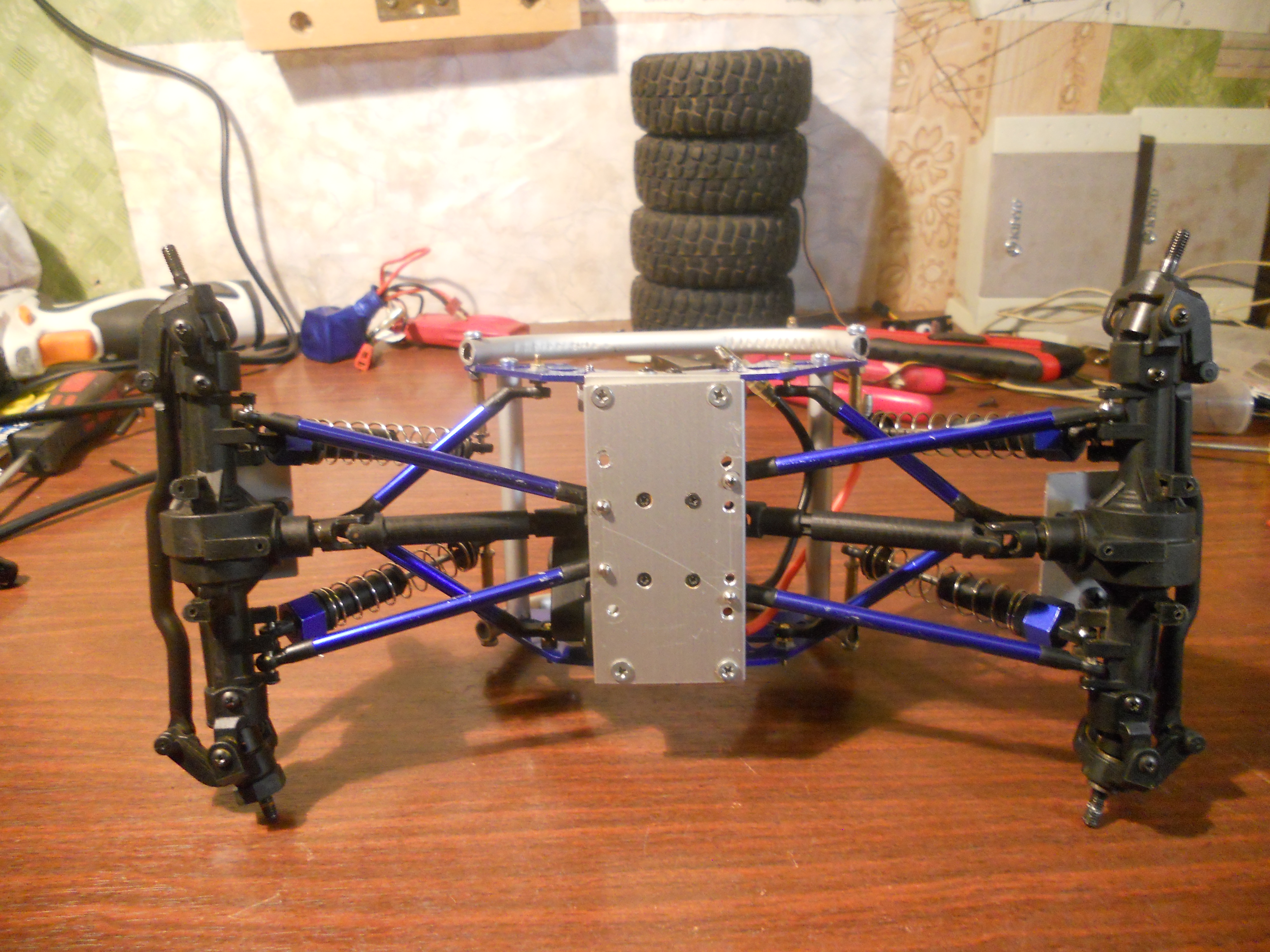
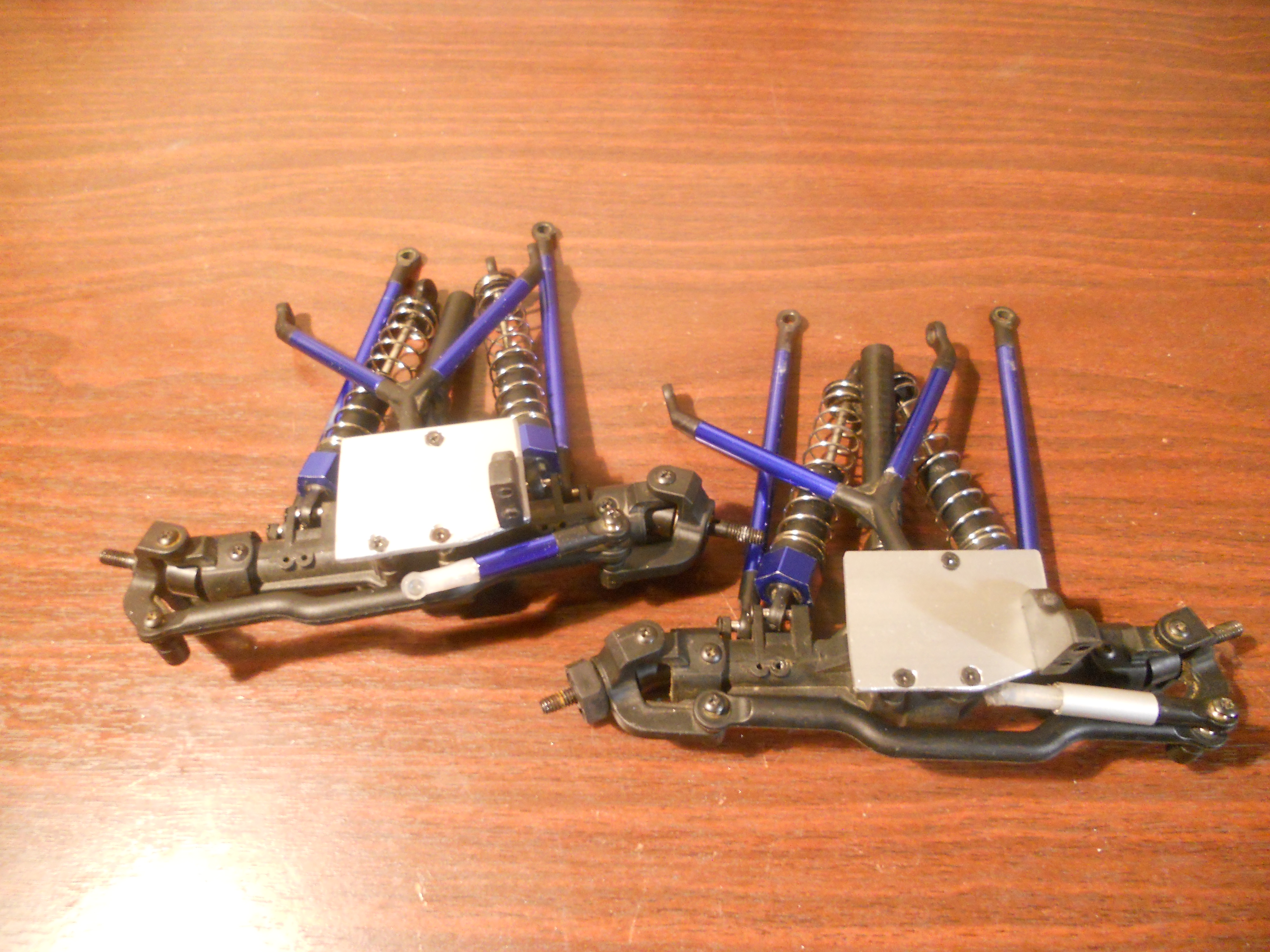
Для этого потребовалось сделать раму шире путём внедрения трубчатых проставок и новой пластины, на которой крепились раздатка и нижние рычаги. Боковые пластины рамы соединены с основной через уголки из-за отсутствия возможности сверлить отверстия в толще алюминиевого листа (пытался дрелью, но ровно не получалось). Верхние точки крепления амортизаторов необходимо было сохранить, чтобы стойки не легли на колёса. Это было достигнуто путем установки шарниров через трубчатые удлинители. "Побочным" эффектом стало увеличение свободного пространства внутри рамы, что позволило разместить там всю электронику вместе с батареей (была LiPo 2S 1800 mah) и как следствие опустить центр тяжести. Под батарею была изготовленна полка из уголка.
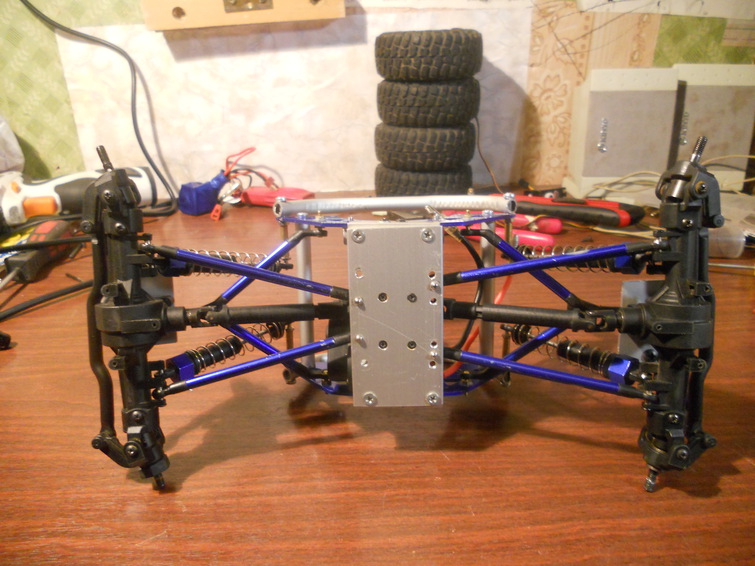
Точки крепления нижних рычагов на раме смещены к центру, чтобы установить колёса большего диаметра, без ограничения угла их поворота.
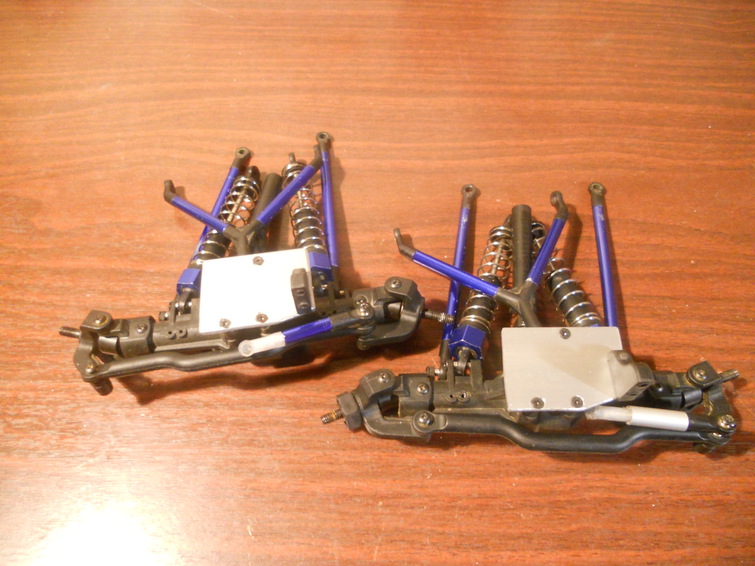
Проблема уменьшения радиуса разворота решалась просто, т.к. мосты модели взаимо заменяемы. Были изготовлены площадки под установку сервоприводов на каждый мост.
Гидроизоляция из шариков (не пременимо для электрики требующей хорошего охлаждения).

Имеющиеся колёса для краулера не годятся, но их сцепные свойства на порядок лучше штатных.
С двумя сервами на мостах захотелось сделать раздельное управление поворотом колёс. И тут возникли проблемы. Штатная двух каналка для этого не годится, и я решился на покупку новой аппаратуры. Обойдя магазины нашёл лиш один вариант с возможностью микширования между двумя каналами. Третий канал лиш последовательно переключал режимы работы сервоприводов, а ценник под 7000 р. был запредельный для всего проекта (не нужен мне был тачскрин и ОС Андроид). Постоял, посмотрел, подумал и купил... шестиканальную футабу для своих самолётов, а старую 4-х каналку приспособил для краулера. Управление колёсами стало полностью не зависимым.
Освоить управление было не просто. Мозг вскипал при контроле за положением модели в пространстве и углами поворота колёс. Зато интересно!
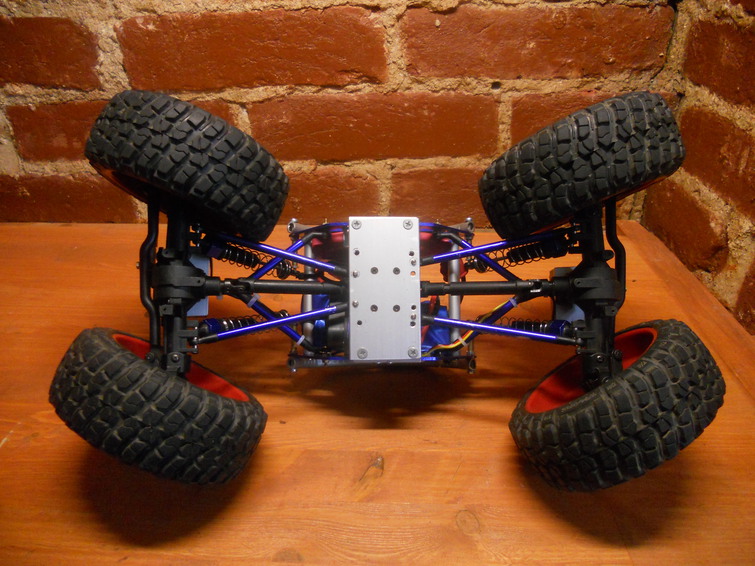

В завершении установил две защитные дуги.
Результатом стало значительное улучшение проходимости, но по стенам пока ещё не ездит).


Детальное изучение конструкции выявило следующие основные недостатки, являющиеся следствием бюджетности:
- высокий центр тяжести из-за расположенной в самом верху электроники и батареи
- слишком большие углы в карданах, приводящие к скручиванию мостов
- "дубовая" резина со сцепными свойствами пластмассы
- большой радиус разворота, который сильно осложнял маневрирование на пересечёнке
В итоге свободное время тратил не на покатушки, а на модернизацию и поиск оптимального решения.
Задачей было улучшение проходимости без дополнительных вложений (только с использованием имеющихся материалов и комплектующих). Варианты с использованием независимого распределения крутящего момента между мостами и изменяемой геометрией подвесок не рассматривались.
Пропущу все промежуточные этапы, среди которых были перенос батареи на передний мост и установка стабилизаторов.
Начнем.
Стремление модели свернуться в спираль лечилось смещением раздатки таким образом, чтобы выходные валы приводов располагались в одной вертикальной плоскости вместе с карданами мостов (т.е. в центре рамы). Это привело к уменьшению углов в карданах и как следствие уменьшение скручивающего момента.
Для этого потребовалось сделать раму шире путём внедрения трубчатых проставок и новой пластины, на которой крепились раздатка и нижние рычаги. Боковые пластины рамы соединены с основной через уголки из-за отсутствия возможности сверлить отверстия в толще алюминиевого листа (пытался дрелью, но ровно не получалось). Верхние точки крепления амортизаторов необходимо было сохранить, чтобы стойки не легли на колёса. Это было достигнуто путем установки шарниров через трубчатые удлинители. "Побочным" эффектом стало увеличение свободного пространства внутри рамы, что позволило разместить там всю электронику вместе с батареей (была LiPo 2S 1800 mah) и как следствие опустить центр тяжести. Под батарею была изготовленна полка из уголка.

Точки крепления нижних рычагов на раме смещены к центру, чтобы установить колёса большего диаметра, без ограничения угла их поворота.
Проблема уменьшения радиуса разворота решалась просто, т.к. мосты модели взаимо заменяемы. Были изготовлены площадки под установку сервоприводов на каждый мост.
Гидроизоляция из шариков (не пременимо для электрики требующей хорошего охлаждения).

Имеющиеся колёса для краулера не годятся, но их сцепные свойства на порядок лучше штатных.
С двумя сервами на мостах захотелось сделать раздельное управление поворотом колёс. И тут возникли проблемы. Штатная двух каналка для этого не годится, и я решился на покупку новой аппаратуры. Обойдя магазины нашёл лиш один вариант с возможностью микширования между двумя каналами. Третий канал лиш последовательно переключал режимы работы сервоприводов, а ценник под 7000 р. был запредельный для всего проекта (не нужен мне был тачскрин и ОС Андроид). Постоял, посмотрел, подумал и купил... шестиканальную футабу для своих самолётов, а старую 4-х каналку приспособил для краулера. Управление колёсами стало полностью не зависимым.
Освоить управление было не просто. Мозг вскипал при контроле за положением модели в пространстве и углами поворота колёс. Зато интересно!
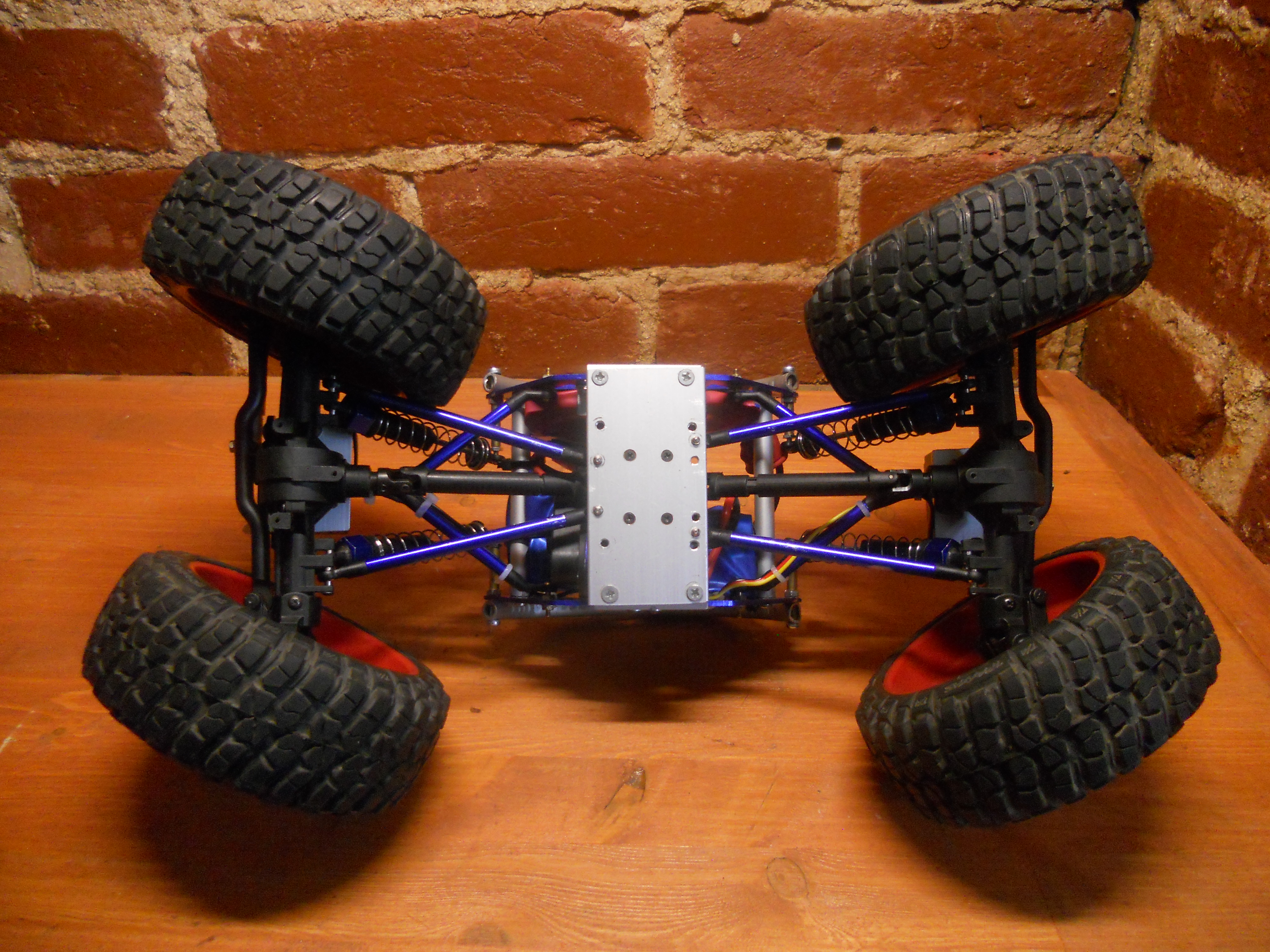

В завершении установил две защитные дуги.
Результатом стало значительное улучшение проходимости, но по стенам пока ещё не ездит).















http://www.sotmarket.ru/product/radiocontrolled_car_hsp_kulak_long_electric_crawler_94680l_2_4g.html#
На мой взгляд гораздо лучше. Сравнивал две эти модели у длинного проходимость получше будет и едет пободрей, но это уже не краулер. Ходы подвески поменьше, но если мало будет то просто поменя амортизаторы. Рама карданы все железо. Иесли не сложно плюсани! будет первый плюс)
вот фото
http://vk.com/club45506607?z=photo-45506607_320313949/wall-45506607_423
P.S. ВСЕМ СПАСИБО ЗА ВАШИ КОМЕНТАРИИ!