В статье я показываю пример использования коптера Ar.Drone 2 с программным обеспечением QGroundControl для выполения автоматических полетов по точкам. В предыдущей статье я занимался тем же самым, за исключением того, что тот полет не увенчался успехом.


В предыдущей статье http://www.parkflyer.ru/84392/blogs/view_entry/2883/ мой полет по точкам окончился неудачей - дрон упал , выполнив лишь половину полетной миссии.
Высушив аппарат, я вытащил его вновь на подобные испытания.
Но сначала о параметрах предыдущего полета. Кроме видео, я повторюсь, можно анализировать зависимость высоты, скорости, уровня заряда батарей от времени полета и читать лог-файл. Лог-файл я прочитать не смог, ибо его нужно читать по Telnety (цепляться к айпишнику к дрону через командную строку и читать бинарный файл) и самое главное читать СРАЗУ, то есть все чтобы было в одном коннекте - и полет и чтение!!! Но как я вытащил дрон из реки, я его сразу выключил, а когда влючаешь журнал лог-данных очищается. Можно заморочиться, писать данные куда-нибудь (кстати данные важные в этом журнале) в комп, как в басне "[так можно,] я в том уверен; Да рыться лень...".
Вытаскиваем графки полетов. Заходим в в AR.Freeflight, выбираем AR.Drone academy,

Видим список наших полетов:

Выбираем полет, смотрим графики:
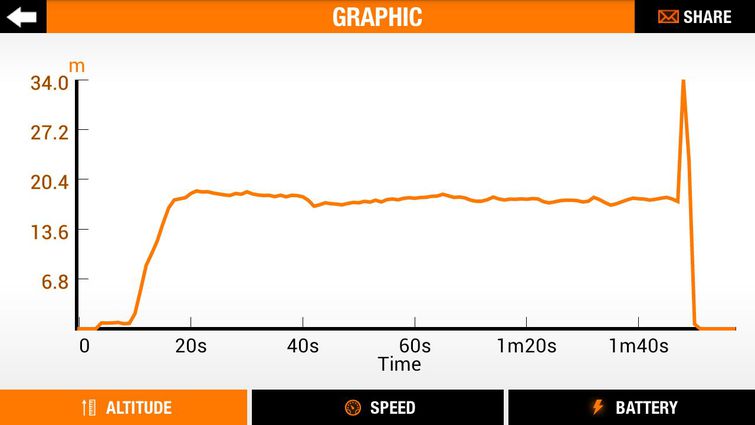
1. Высота:
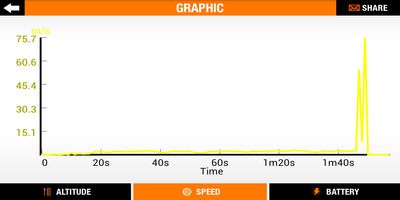
2. Скорость (какая - вертикальная или абсолютная центра масс??):
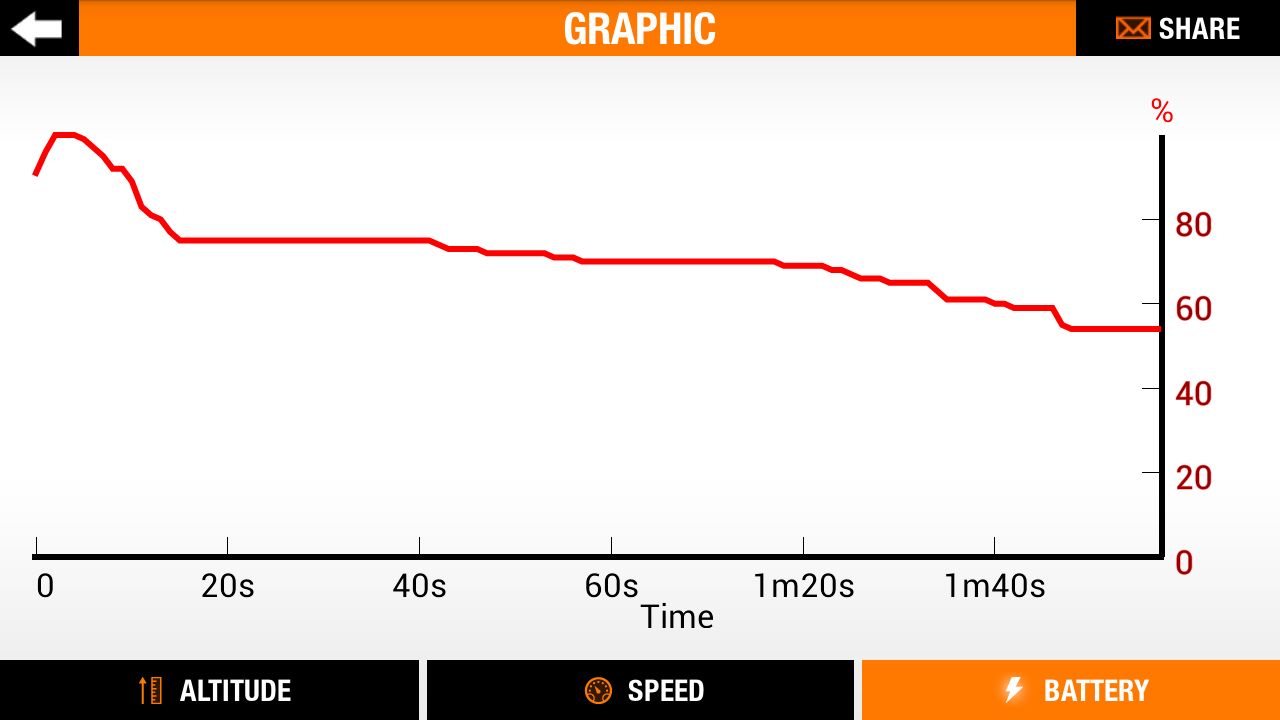
3. Уровень заряда батарей:

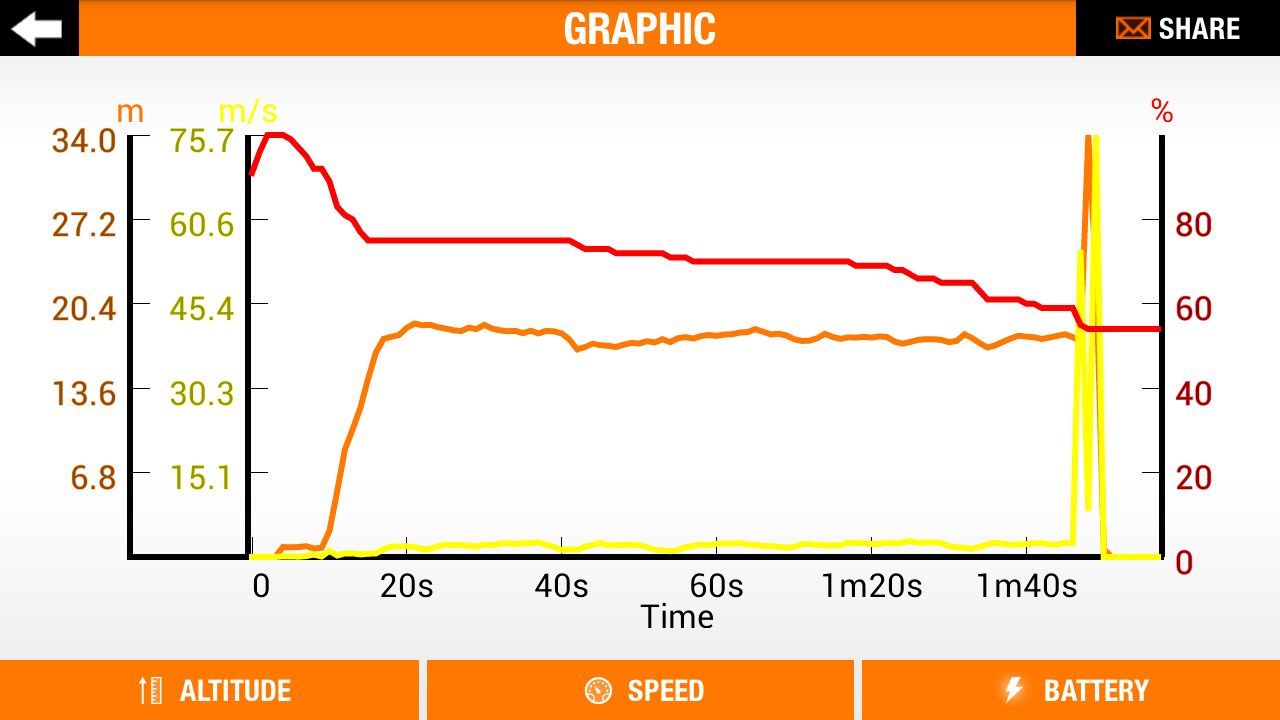
4. Все на одном графике:
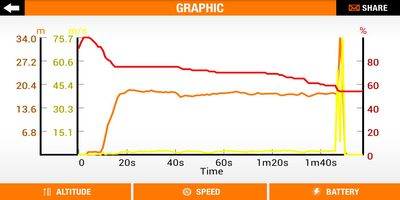
Проанализировав данные эти (еще на Айфоне я сморел 3D визуализацию полета, где Дрон просто задрало и он упал), видно, что батарея была выше половины.
Из графиков я заключил:
1. Причина падения явно не в низком заряде батарей;
2. Батарея садилась (винты работали) ровно до того момента, как дрон "поднялся" на максимальную высоту - 34 метра.
3. Скачки высоты (14 метров) и скорости не имеют ничего общего с реальностью. Скачок скорости связан со скачком высоты как первая производная по времени. Из него видим что скорость выросла на 60 м/с (200 км/ч) примерно за секунду! Чтобы сила сообщила такое ускорение этому телу, мощность системы должна составлять: работа при подъеме на 14 метров: А=0,38кг*10м/с2*14=53 дж за 1 с это мощность в 53 ватт. 4 движка обеспечивают электрическую мощность в 58 ватт. Здесь явно скачки - это глюки системы.
4. Остается понять - что за скорость там рисуется? перед ударом об Землю скорость должна быть максиматьной!
Вывод: я так думаю, что причиной падения коптера является сбой ПО в нем самом. Вероятно, это также случилось по тому, что глюк высоты привел к срабатыванию защиты по высоте, дрон сравнил разрешенную высоту с текущей и тупо отключил движки. Почему произошел сбой - другой вопрос. Бортовой лог-файл нам бы помог - там бы было прописано что защита сработала.
Да и закончим с этим.
Итак, дубль 2.
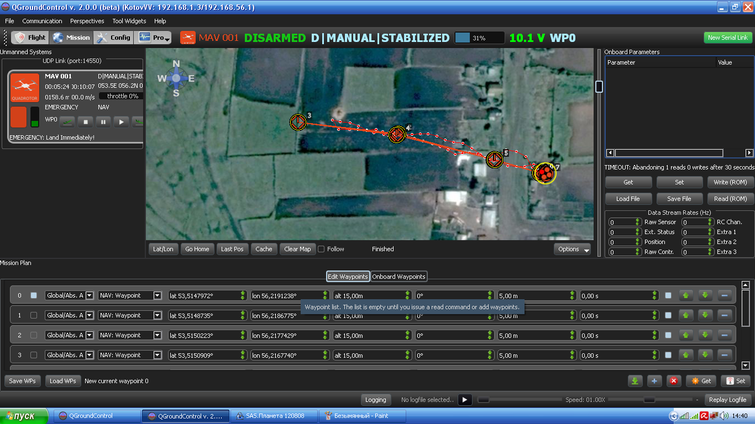
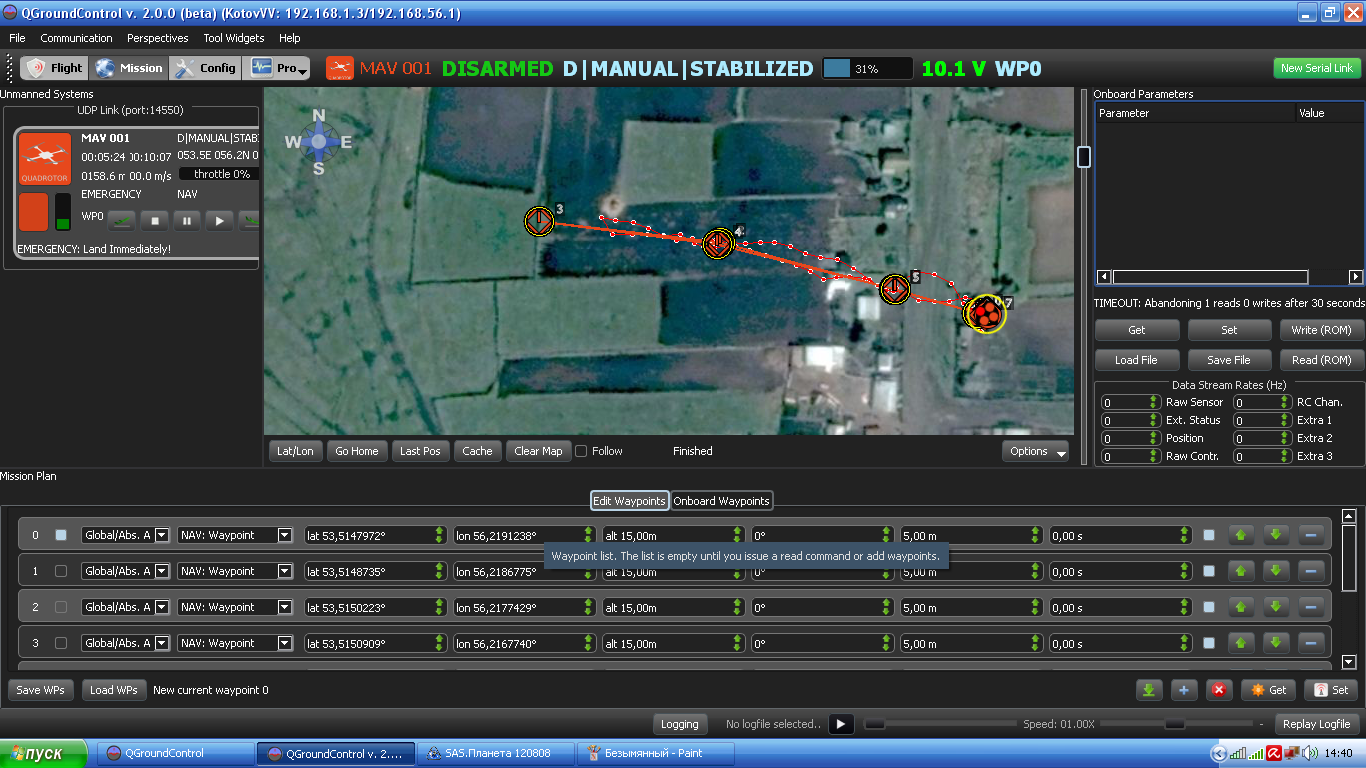
Я собрался с новыми силами и поехал на аналогичное испытание. Также развернул ноут со всем-привсем и нарисовал ему следующую миссию (ее длина около 200 м в один конец):

Звездочка - это коптер. Произвели пуск, дрон успешно выполнил миссию и вернулся туда, откуда взлетел (в радиусе 2 м). Вот его траектория:
Из рисунков видно - что коннект (связь, соединение) пропал при подлете к 3 путевой точке. Как пропал коннект так мы подумали, что опять его потеряли...но скоро он прилетел. Потеря коннекта вызвана отсутствием прямой видимости. А так вафли-адаптера на 200 м , я думаю, хватит для телеметрии. При полете постоянно дул ветер, дрон его компенсировал (видно из видео). Батареи осталось треть.
Видео с земли:
Видео с борта:
Информация - графики полета:

Замечательно из графиков, что батарея садиться быстро при наборе высоты.
К слову, на очередной глюк я нарвался, когда решил полетать со смарфона. Вот график:

Дрон не мог взлететь, еле махал винтами, защита по низкому уровню батарей даже не срабатывала. Выше видно, то уровень заряда "замерз". Разработчики, наверное забыли старую басню программиста, что написание занимает 10% времени, а отладка - 90%.
Этим я старался показать, что автоматические полеты требуют особого внимания.
Всем удачных безглючных полетов!
Высушив аппарат, я вытащил его вновь на подобные испытания.
Но сначала о параметрах предыдущего полета. Кроме видео, я повторюсь, можно анализировать зависимость высоты, скорости, уровня заряда батарей от времени полета и читать лог-файл. Лог-файл я прочитать не смог, ибо его нужно читать по Telnety (цепляться к айпишнику к дрону через командную строку и читать бинарный файл) и самое главное читать СРАЗУ, то есть все чтобы было в одном коннекте - и полет и чтение!!! Но как я вытащил дрон из реки, я его сразу выключил, а когда влючаешь журнал лог-данных очищается. Можно заморочиться, писать данные куда-нибудь (кстати данные важные в этом журнале) в комп, как в басне "[так можно,] я в том уверен; Да рыться лень...".
Вытаскиваем графки полетов. Заходим в в AR.Freeflight, выбираем AR.Drone academy,
Видим список наших полетов:
Выбираем полет, смотрим графики:
1. Высота:
2. Скорость (какая - вертикальная или абсолютная центра масс??):
3. Уровень заряда батарей:
4. Все на одном графике:
Проанализировав данные эти (еще на Айфоне я сморел 3D визуализацию полета, где Дрон просто задрало и он упал), видно, что батарея была выше половины.
Из графиков я заключил:
1. Причина падения явно не в низком заряде батарей;
2. Батарея садилась (винты работали) ровно до того момента, как дрон "поднялся" на максимальную высоту - 34 метра.
3. Скачки высоты (14 метров) и скорости не имеют ничего общего с реальностью. Скачок скорости связан со скачком высоты как первая производная по времени. Из него видим что скорость выросла на 60 м/с (200 км/ч) примерно за секунду! Чтобы сила сообщила такое ускорение этому телу, мощность системы должна составлять: работа при подъеме на 14 метров: А=0,38кг*10м/с2*14=53 дж за 1 с это мощность в 53 ватт. 4 движка обеспечивают электрическую мощность в 58 ватт. Здесь явно скачки - это глюки системы.
4. Остается понять - что за скорость там рисуется? перед ударом об Землю скорость должна быть максиматьной!
Вывод: я так думаю, что причиной падения коптера является сбой ПО в нем самом. Вероятно, это также случилось по тому, что глюк высоты привел к срабатыванию защиты по высоте, дрон сравнил разрешенную высоту с текущей и тупо отключил движки. Почему произошел сбой - другой вопрос. Бортовой лог-файл нам бы помог - там бы было прописано что защита сработала.
Да и закончим с этим.
Итак, дубль 2.
Я собрался с новыми силами и поехал на аналогичное испытание. Также развернул ноут со всем-привсем и нарисовал ему следующую миссию (ее длина около 200 м в один конец):

Звездочка - это коптер. Произвели пуск, дрон успешно выполнил миссию и вернулся туда, откуда взлетел (в радиусе 2 м). Вот его траектория:
Из рисунков видно - что коннект (связь, соединение) пропал при подлете к 3 путевой точке. Как пропал коннект так мы подумали, что опять его потеряли...но скоро он прилетел. Потеря коннекта вызвана отсутствием прямой видимости. А так вафли-адаптера на 200 м , я думаю, хватит для телеметрии. При полете постоянно дул ветер, дрон его компенсировал (видно из видео). Батареи осталось треть.
Видео с земли:
Видео с борта:
Информация - графики полета:
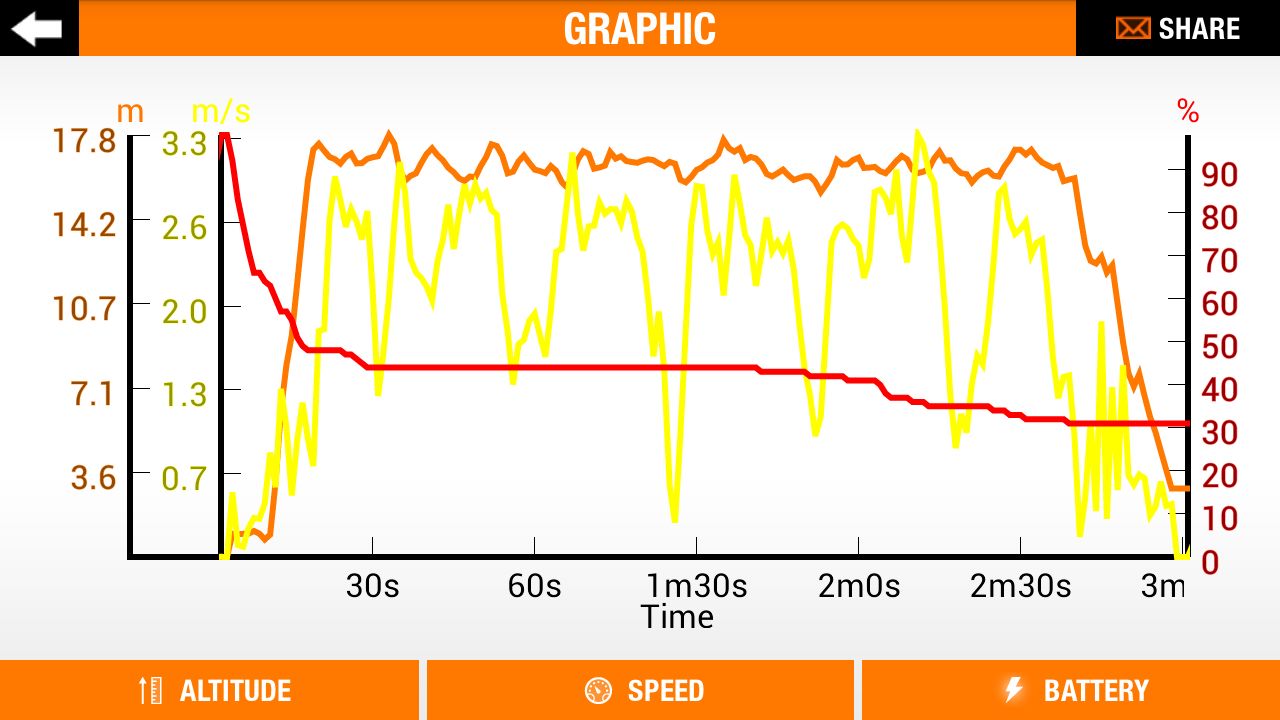
Замечательно из графиков, что батарея садиться быстро при наборе высоты.
К слову, на очередной глюк я нарвался, когда решил полетать со смарфона. Вот график:
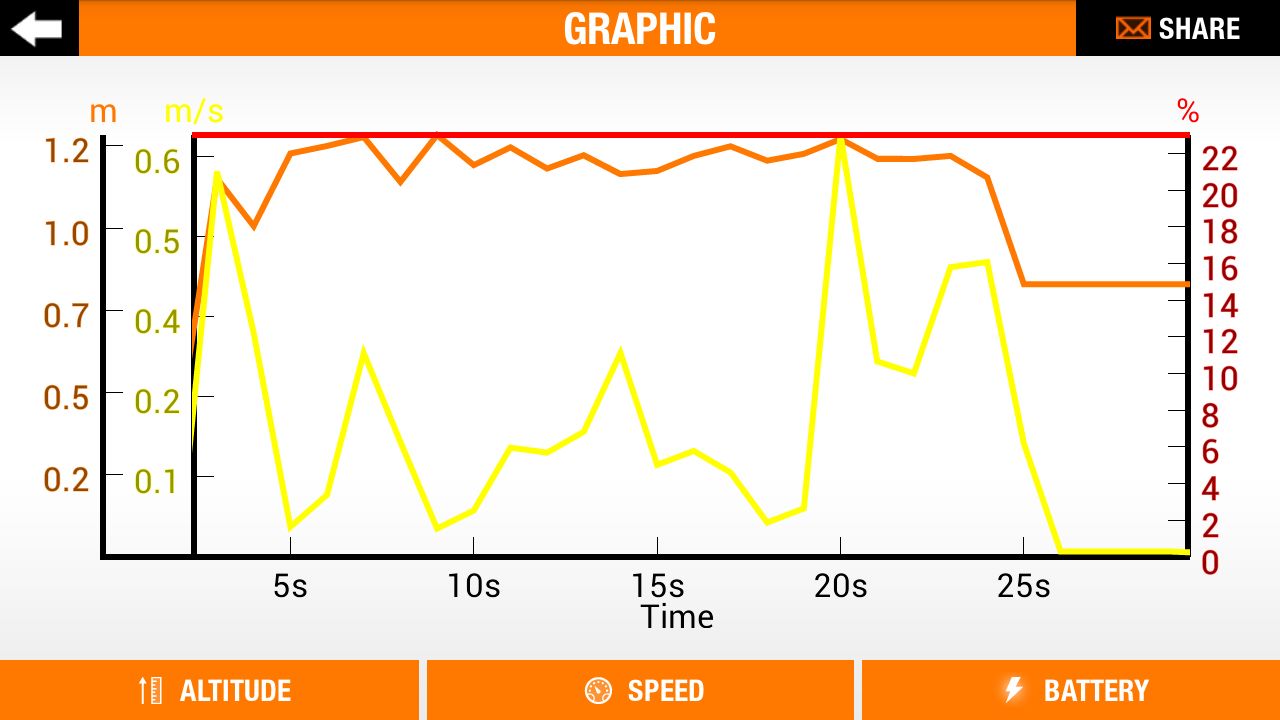
Дрон не мог взлететь, еле махал винтами, защита по низкому уровню батарей даже не срабатывала. Выше видно, то уровень заряда "замерз". Разработчики, наверное забыли старую басню программиста, что написание занимает 10% времени, а отладка - 90%.
Этим я старался показать, что автоматические полеты требуют особого внимания.
Всем удачных безглючных полетов!













Цель есть, - 3D съемка.
А испытания мне нужны, чтобы обкатать автоматические регуляторы, алгоритмы работы, и в конечном итоге - добиться стабильного автоматического полета.
Понимаю, что все есть в продаже, но мне, в первую голову интересны системы с открытым кодом. Я считаю, что смотря на тот же контроллер, я должен видеть, какие там происходят процессы.
Помимо того,как я понимаю, в арду работают ПИД-регули, что ставит под сомнение качество/возможность регулирования/отработки/широкой области устойчивости автоматической системы.
Надеюсь будет полезной.
даже рифма!
пример нормального автополёта по точкам(присутствует мат):
а дрон этот походу игрушка и не спасёт когда нужно а наоборот может убить)
странный чёрный ящик с памятью энергозависимой, очень странный, при авариях часто акум или отлетает или умирает....
я вот тут по просьбе снимал как работать с чёрным ящиком ардупилота и наземной станции