В этой статье я попробую объяснить, чем сенсорный мотор отличается от бессенсорного (кроме наличия, собственно, сенсора) и можно ли все-таки поменять направление вращения ротора на противоположное, если регулятор не имеет функции реверса (не путать с задним ходом).

Для начала немного теории.
Так как же все-таки работает связка бесколлекторный мотор + регулятор? С коллекторными моторами, вроде бы, все понятно: жестко соединенный с ротором двигателя коллектор вращается между двух неподвижных щеток, таким образом ток подается на нужные обмотки синхронно с вращением ротора.
Примерно тем же занимается и бесколлекторный регулятор скорости. Вот только проблема в том, что регулятор не знает, в каком положении находится ротор двигателя, когда тот остановлен. Узнать это он может только по наведенной ЭДС в одной из фаз, проходящей в данный момент через ноль. Но чтобы получить наведенную ЭДС, нужно изменяющееся магнитное поле, т.е. вращающийся ротор двигателя. Замкнутый круг получается: Чтобы запустить двигатель, нужно узнать положение ротора, а чтобы узнать положение ротора, нужно запустить двигатель...
Бездатчиковые регуляторы на момент старта просто выдают по всем фазам серию импульсов, чтобы хоть как-то сдвинуть с места ротор и таким образом "увидеть" его положение. После этого регулятор уже сможет подключать нужные обмотки в нужный момент и поддерживать вращение ротора. Отсюда и несколько затянутый и дерганый старт по сравнению с коллекторными двигателями. Еще один недостаток - не очень стабильная работа на малых оборотах: наведенное в обмотках напряжение настолько низкое, что контроллер регулятора не всегда способен его различить, и появляется риск срыва синхронизации.
Чтобы избавиться от этих недостатков, на некоторых моторах устанавливают магнитные сенсоры. По сути, сенсор и регулятор хода образуют бесконтактный коллектор, все так же жестко привязанный к физическому расположению обмоток. Теперь регулятору не нужно заниматься рассчетами и угадыванием положения ротора - он точно знает, на какие обмотки и какой полярности нужно подавать напряжение, если сработал тот или иной датчик.
Вроде бы все прекрасно: и мотор стабильно работает во всем диапазоне оборотов, и срывы синхронизации просто невозможны, как и на коллекторниках... Но при этом приходится тщательно следить за правильностью подключения датчиков и обмоток двигателя: иначе, если, например, срабатывает датчик А, а запитывается обмотка С, то двигатель просто не сможет работать.
На модельных моторах разъем сенсора делают такой, чтобы неправильно подключить его было невозможно. Фазы двигателя и регулятора подписывают, строго определяя один-единственный правильный вариант подключения. Более-менее серьезные производители автомоделей учитывают стандартное направление вращения сенсорных двигателей и с их шасси, обычно, проблем не возникает.
Но что делать, если собственноручно модернизированная модель какого-нибудь малоизвестного производителя вдруг, вместо того, чтобы ехать вперед, рванула задним ходом? На бездатчиковых моторах просто поменял любую пару фаз местами, и порядок, но с сенсором такое не проходит. А исправить ситуацию механически (например, перевернув диффиренциалы) далеко не всегда позволяет конструкция шасси... Не отказываться же теперь от преимуществ сенсора?
Конечно нет! Логичное решение - вместе со сменой фаз, поменять местами и пару соответствующих датчиков.
А посему, переходим к практической части.
Нашими подопытными будут сенсорный двигатель Turnigy Mach3 10.5T kv3600 и регулятор HobbyKing X-Car 60A.

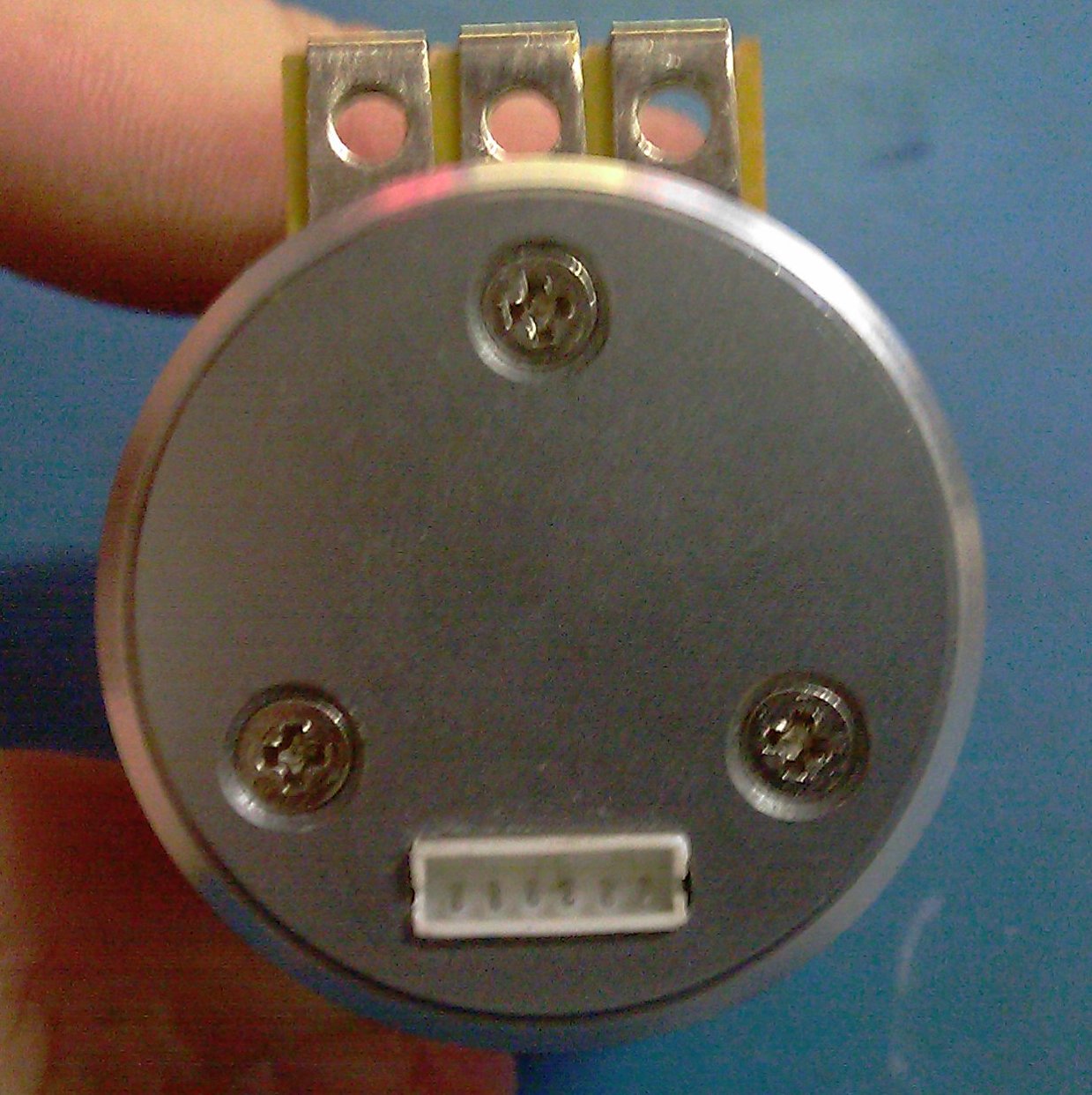

Двигатель, кстати, внутри совсем не такой хороший, как выглядит снаружи. Чего стоят только зазоры в несколько миллиметров между статором и магнитом ротора...
Такое ощущение, что в корпус 540-го мотора засунули ротор от 380-го. Ротор не отбалансирован, подшипники люфтят (хотя, справедливости ради, стоит сказать что смазка в них имеется в достаточном количестве), работает мотор шумно... В общем, я ждал от него большего.
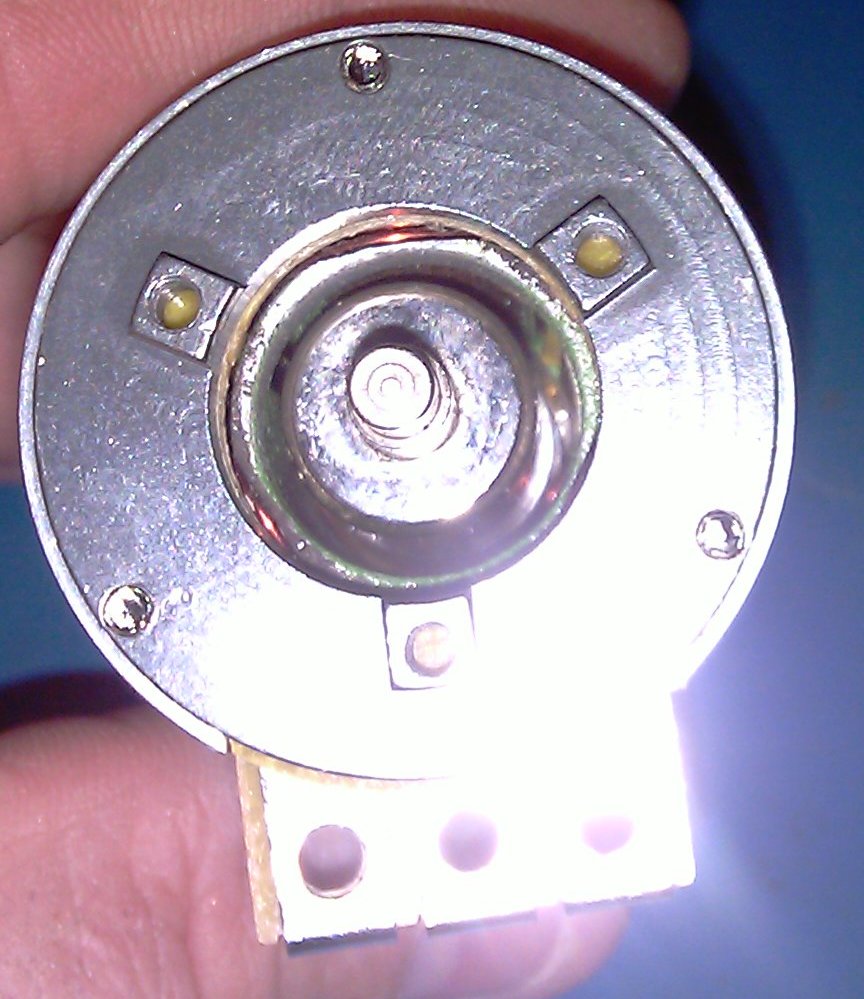
Но вернемся к сенсору.
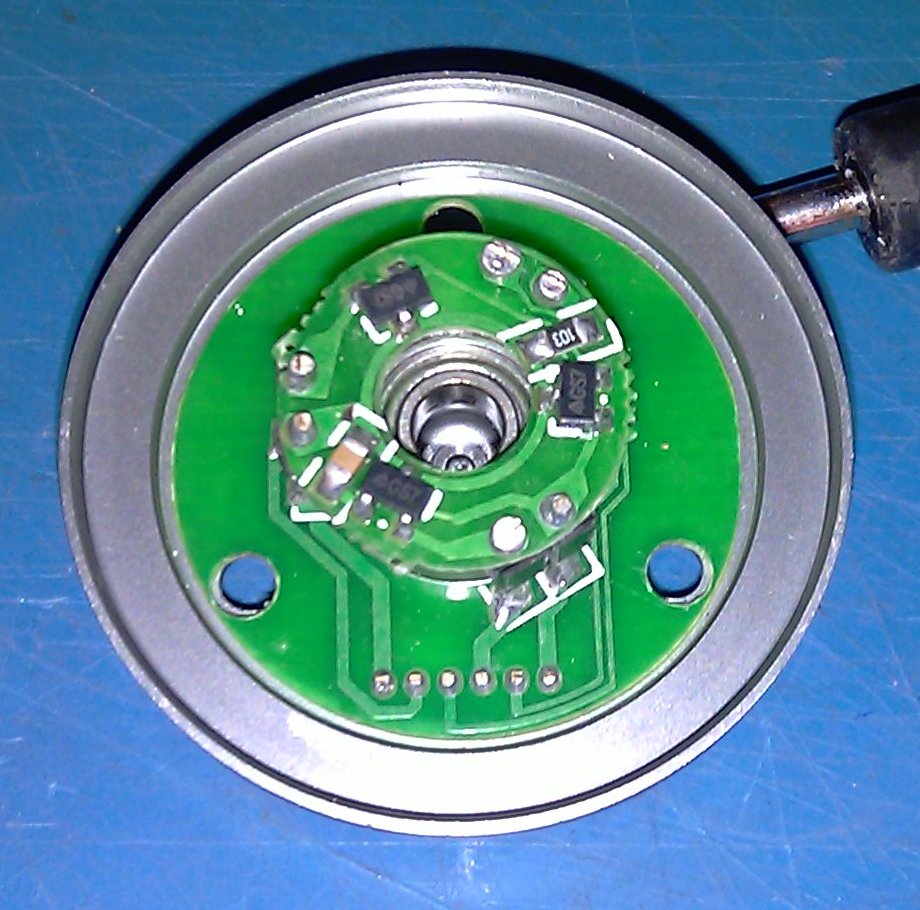
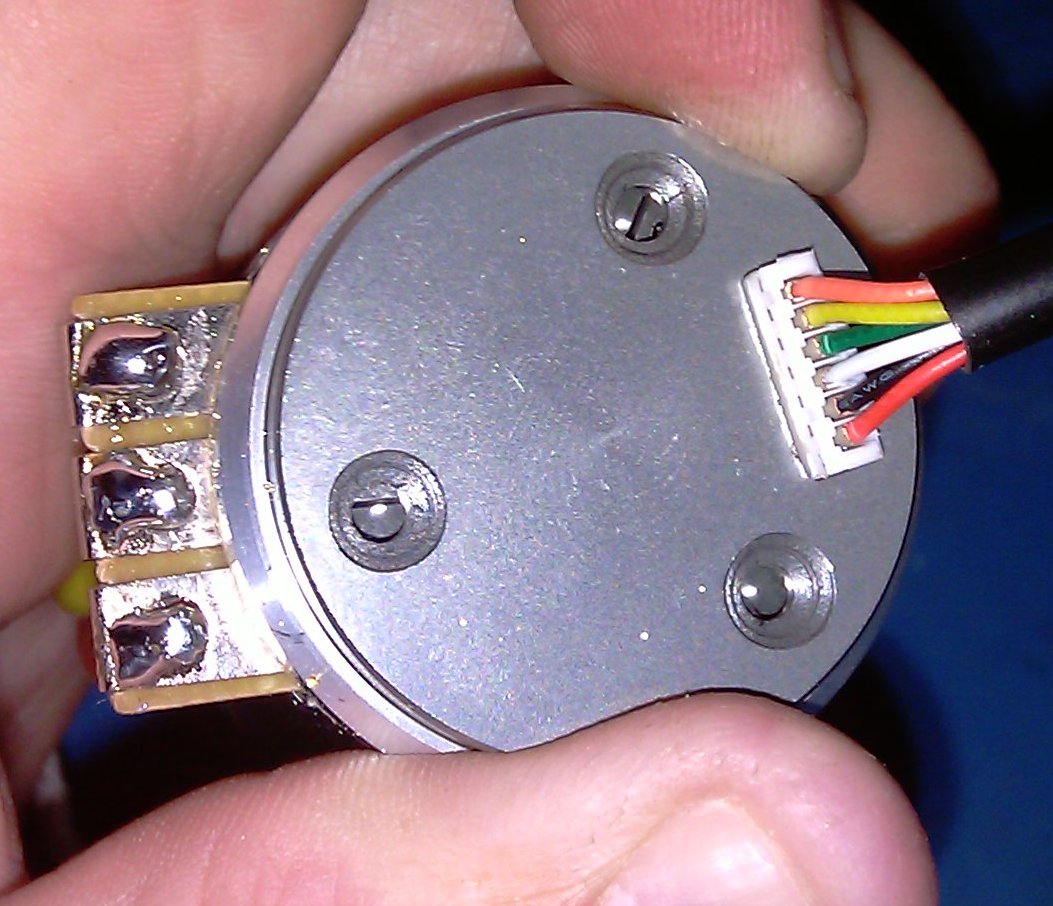
Ничего "космического" - 3 датчика Холла, небольшой конденсатор и резистор на 10кОм. Проследив дорожки до разъема, я набросал такую вот схему:
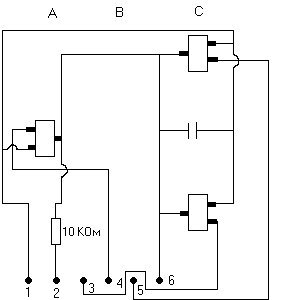
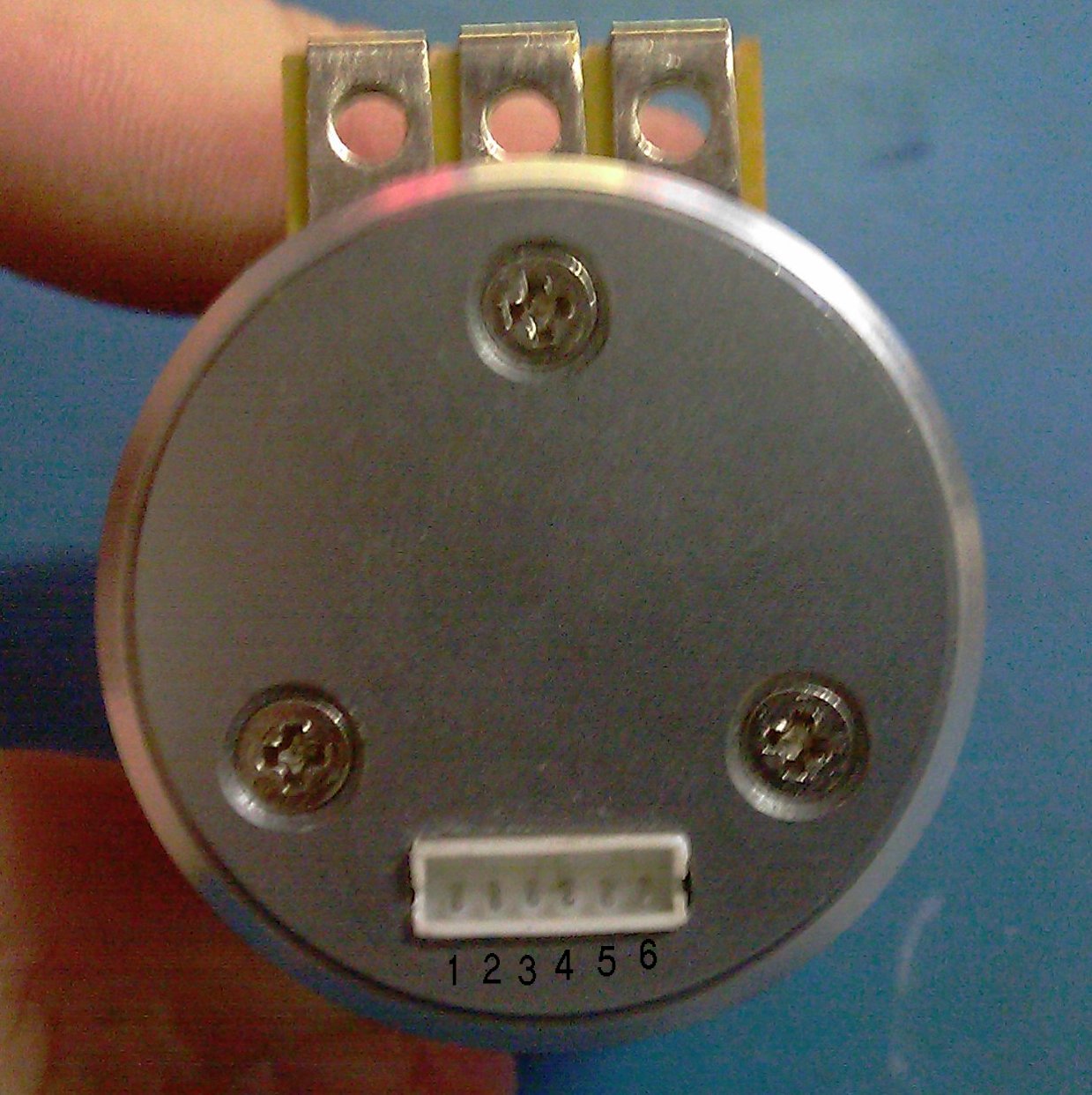
Расположение датчиков на схеме примерно соответствует их физическому размещению в корпусе мотора, если смотреть на него со стороны задней крышки. Вместо резистора, насколько я понял, должен был стоять термодатчик, но китайцы решили сэкономить...
Теперь попробуем заставить мотор крутиться в противоположную сторону. Я менял местами фазы А и С.
С отключенным сенсором, как и ожидалось, никаких проблем - мотор запустился в обратную сторону. Но с сенсором он только дергался, грелся, но работать не хотел... Тоже вполне ожидаемо.
Теперь нужно было подобрать правильную последовательность датчиков. Мне повезло - попал с первого раза, поменяв местами 3 и 5 провода на сенсорном разъеме, т.е., в данном случае, белый и желтый провода:
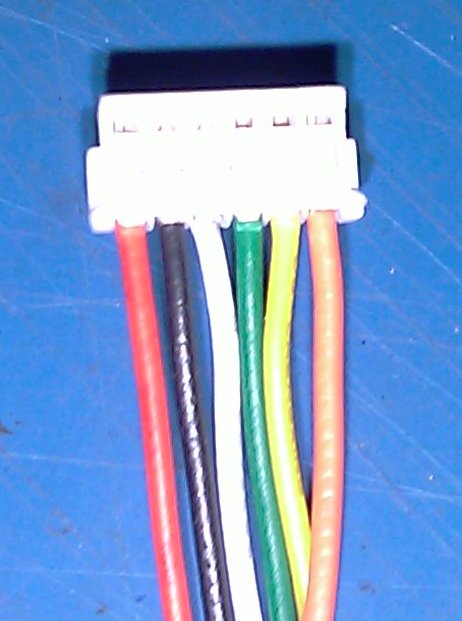
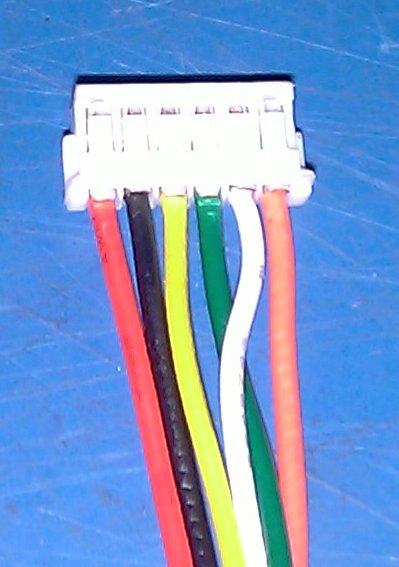
Результат не заставил себя ждать: мотор бодренько закрутился в обратную сторону!
Ура! Победа!!!
Победа, да не совсем. Работал мотор не очень ровно и умудрялся греться даже совсем без нагрузки. Причина такого поведения - неправильный тайминг. Он-то был настроен на заводе с рассчетом на вполне определенное направление вращения.


Обратите внимание, что датчики Холла расположены не точно по центру "зубов" статора или строго между ними, а сдвинуты к одному из краев "зуба". Именно этот угол и определяет "опережение зажигания", в смысле, тайминг. Более стабильная работа мотора получалась при повороте задней крышки против часовой стрелки, т.е. датчики смещались ближе к противоположному краю "зуба" статора.
Но так как конструкция задней крышки данного конкретного двигателя не позволяет повернуть ее на достаточно большой угол, а тем более закрепить ее в таком положении, длительных тестов с подбором тайминга я не проводил. Так что, тут еще остается пространство для экспериментов.













Перестаньте говорить ерунду: "Примерно тем же занимается и бесколлекторный регулятор скорости. Вот только проблема в том, что регулятор не знает, в каком положении находится ротор двигателя, когда тот остановлен. Узнать это он может только по наведенной ЭДС в одной из фаз, проходящей в данный момент через ноль. Но чтобы получить наведенную ЭДС, нужно изменяющееся магнитное поле, т.е. вращающийся ротор двигателя. Замкнутый круг получается: Чтобы запустить двигатель, нужно узнать положение ротора, а чтобы узнать положение ротора, нужно запустить двигатель..."
Ахинея полная. Регулятору не надо ничего "знать". Он выдает 3-ри синусоиды, сдвинутые одна от другой на 120 градусов. В зависимости как подключены обмотки, двигатель вращается либо в одну, либо в другую сторону. Переключением двух любых выводов вращение меняется на противоположное. Учите физику, и электротехнику впридачу.
Вот так на полном невежестве читателей "рубится" рейтинг.
Но если вдруг сами не найдете то обратите внимание на схемку:
http://s017.radikal.ru/i407/1202/0e/afaecf5e1b21.gif
В особенности на левый нижний угол и делители из резисторов R15R6 R17R16 R19R18
А по ссылке Евгения - типовая схема относительно простого бесколлекторного регулятора хода, типа авиационных. Датчиков Холла на ней и не должно быть.
Евгений, ему просто лень покрутить колесиком мышки. Или очень хочется пофлудить. Ни схемы он, видите ли, не разглядел, ни ссылки, которую я давал в комментах ниже на его вопрос...
Вывод: тролль (и даже не скрывается - аж 3 аккаунта имеет). Действия: игнор.
http://aircam.ru/gallery/albums/userpics/10022/BLDC_SCHEMA.jpg
Цитирую: "Теперь нужно было подобрать правильную последовательность датчиков. Мне повезло - попал с первого раза, поменяв местами 3 и 5 провода на сенсорном разъеме, т.е., в данном случае, белый и желтый провода:Теперь нужно было подобрать правильную последовательность датчиков. Мне повезло - попал с первого раза, поменяв местами 3 и 5 провода на сенсорном разъеме, т.е., в данном случае, белый и желтый провода..."
Считаю работу незаконченой, а как же красный и черный; красный и зеленый; красный и оранжевый; черный и белый и т.д. Потрудитесь, пожалуйста, проверить все возможные варианты. А то ненаучно получается: поменял 3 и 5 провод и че? Получилось? А если нет? Проверьте все возможные варианты, тогда и датчик Холла не придется двигать. Ничего не поставил.
А вы схему-то смотрели? Первый и шестой провода - питание датчиков. Второй - резистор, который, предположительно, должен был бы быть термодатчиком. Остаются 3 вывода датчиков Холла на 3-м, 4-м и 5-м пинах разъема. Если поменять местами не те датчики, то получим все ту же дерготню с нагревом, поэтому я и ограничился сменой одной пары фаз и соответствующей пары сенсоров. Рабочую комбинацию для поменяных местами фаз А и С я подобрал (точнее, угадал, но это несущественно). Результат достигнут? Мотор закрутился в другом направлении? Да. Естественно, если менять местами другую пару фаз, то и пара датчиков будет другой, но варианта осталось всего 2, и они очевидны.
Смысл раздувать краткую статью до докторской диссертации?
-На многих регуляторах есть функция ревер двигателя (не путать с задним ходом)
-Зачем пилить/сверлить крышку, когда можно сдвинуть, по оси, плату датчиков
-Статья хорошая, для общего равития и понимания работы б/к двигателя
1. Где-то, действительно, реверс есть (на бессенсорных - так почти поголовно, хотя там и провода перекинуть не проблема). Но вот на СЕНСОРНЫХ регулях Turnigy TrackStar и HobbyKing X-Car его нет. И судя по словам знакомых автомоделистов, такое для сенсорных систем скорее правило, чем исключение... По крайней мере, у меня такое мнение сложилось.
2. Перепаять 3 "стойки", на которых эта платка держится, на такой же высоты, но с кривыми ножками, дабы повернуть платку примерно на 30 градусов? В принципе, реально. Только, ИМХО, просверлить 3 отверстия и аккуратно нарезать в них резьбу будет проще. Намного. Ну и в случае неудачи всегда можно вернуть все обратно.
А так - очень познавательно. +
А как же тогда их на автомодели ставят? Или они с такими моторами только в перед гоняют.
Если я правильно понимаю ситуацию, то на сенсорные движки должен быть какой-то стандарт, т.е. все они, при движении вперед, крутиться должны в одну сторону - против часовой стрелки. По крайней мере, для Mach3 и Trackstar это верно. Если в выходные нас тут совсем не заморозит, посмотрю на моторы у товарищей, тогда можно будет делать более обоснованные выводы.
Ну, или пусть коллеги, у кого есть сенсорные БК-системы, отпишут стандартное направление вращения моторов.