
А теперь поподробнее.
Собственно, вся электроника перекочевала от младшего к старшему (так как младший задумывался как экспериментальная площадка для последующего).
Пульт Turnigy 9x со стандартным приемником
Плата управления: AIO Flight controller с прошивкой мегапират 3.0.1 R3.
Система телеметрии на 433 МГц
GPS модуль NEO-6m
Регуляторы Turnigy Plush 30А
Плата разводки питания
Двигатели D-280-11 (о них я уже давно пожалел, но пока на NTM не хватает средств)
Батарея 2,7А и 5А
Ну и все остальные мелочи:
Корпус для контроллера от Turnigy, корпус для телеметрии, пропеллеры 8*4,5 SF (которые тоже тут временно и будут заменены на 10*4,5), "бананы" 3,5 мм, разъемы XT60, провода 16AWG.
Для новой рамы куплено еще:
Стеклотекстолит 2мм СТЭФ у местных барыг
Лучи
Крепление для двигателей
Начал с проектирования в AutoCAD
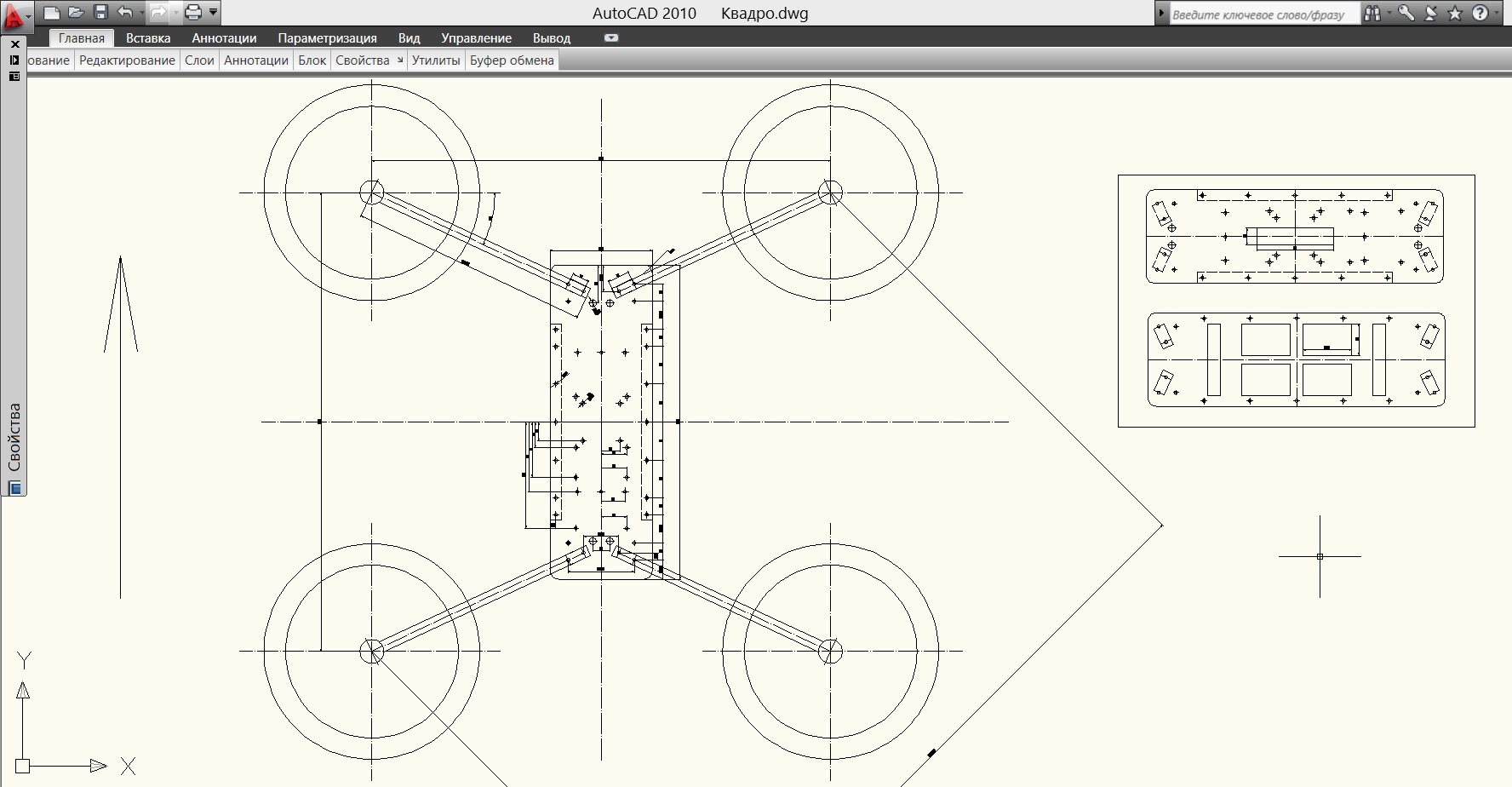
Слева общий вид коптера, справа шаблоны верхней и нижней частей рамы. Общий вид разрабатывался для общего понимания структуры коптера, соотношения элементов, оптимизация и т.д. Шаблон был специально вычерчен в масштабе 1:1 и точь-в-точь распечатан.
После распечатки шаблоны были вырезаны и наклеены с помощью двустороннего скотча на стеклотекстолит. Затем в соответствии с контурами стеклотектолит был вырезан обыкновенной ножевкой по металлу (так как нет у меня пока серьезного рабочего места в новой квартире, а значит нет и станка с ЧПУ и много чего еще нет). Высверливаем отверстия в соответствии с шаблонами
В результате получаем вот что
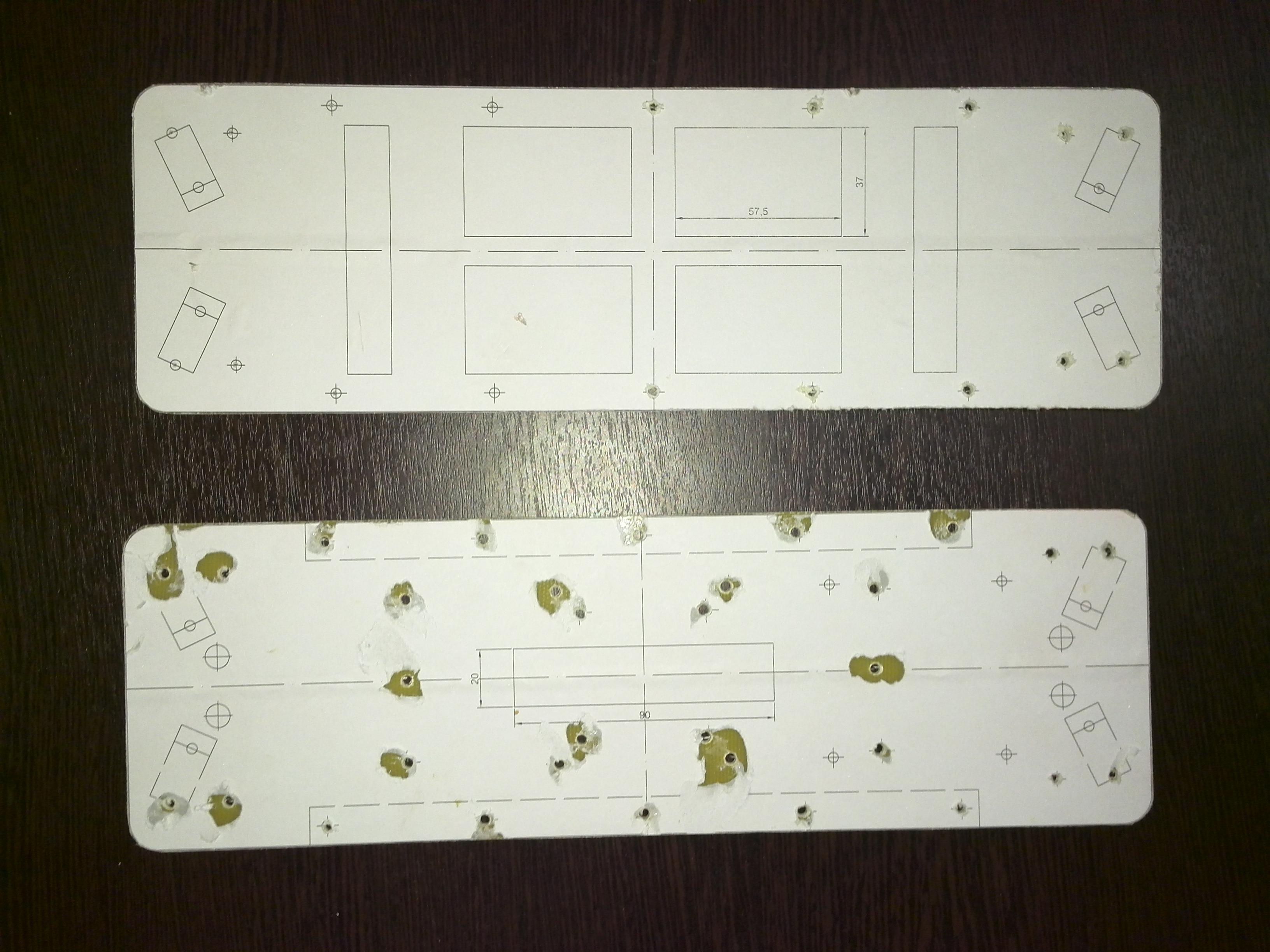
Отрываю часть шаблона, чтобы посмотреть как получилось резать и сверлить текстолит.
В целом, я доволен, но происходит расслоение возле отверстий и кое-где в месте отрезаний.
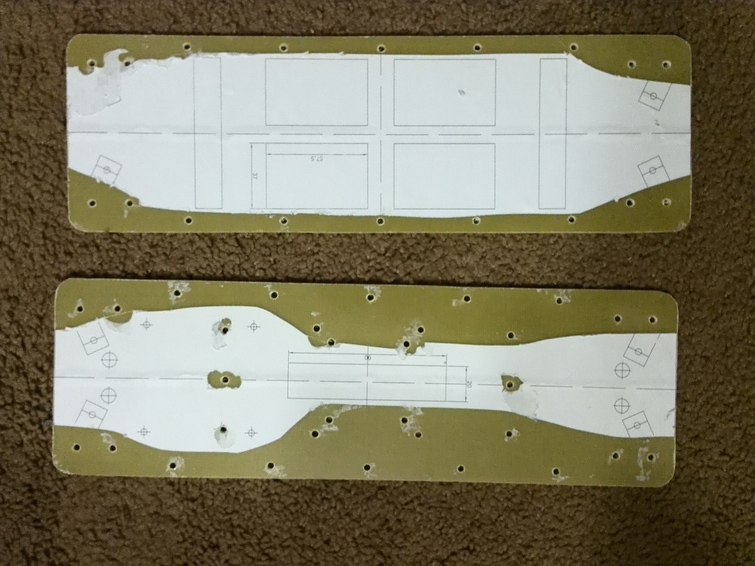
Затем досверлил все отверстия и вырезал все отверстия (для облегчения конструкции, но не в ущерб жесткости и прочности). Для примера приведу фото нижней части
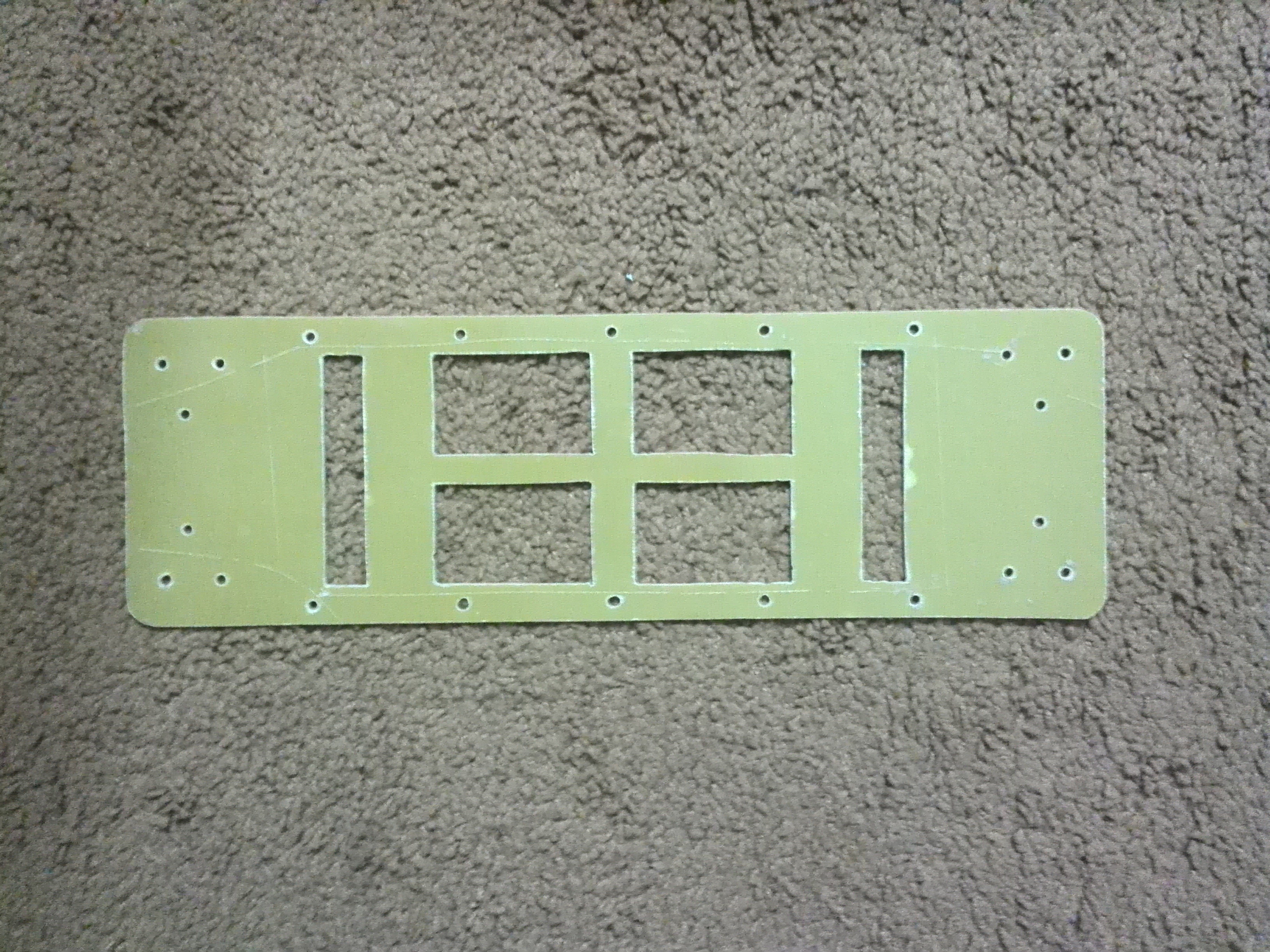
Видно некоторые огрехи в выпиливании и вытачивании, а также небольшое расслоение стеклотекстолита, но это, я думаю, не сильно страшно (поправьте, если не прав)
Начинаю сборку
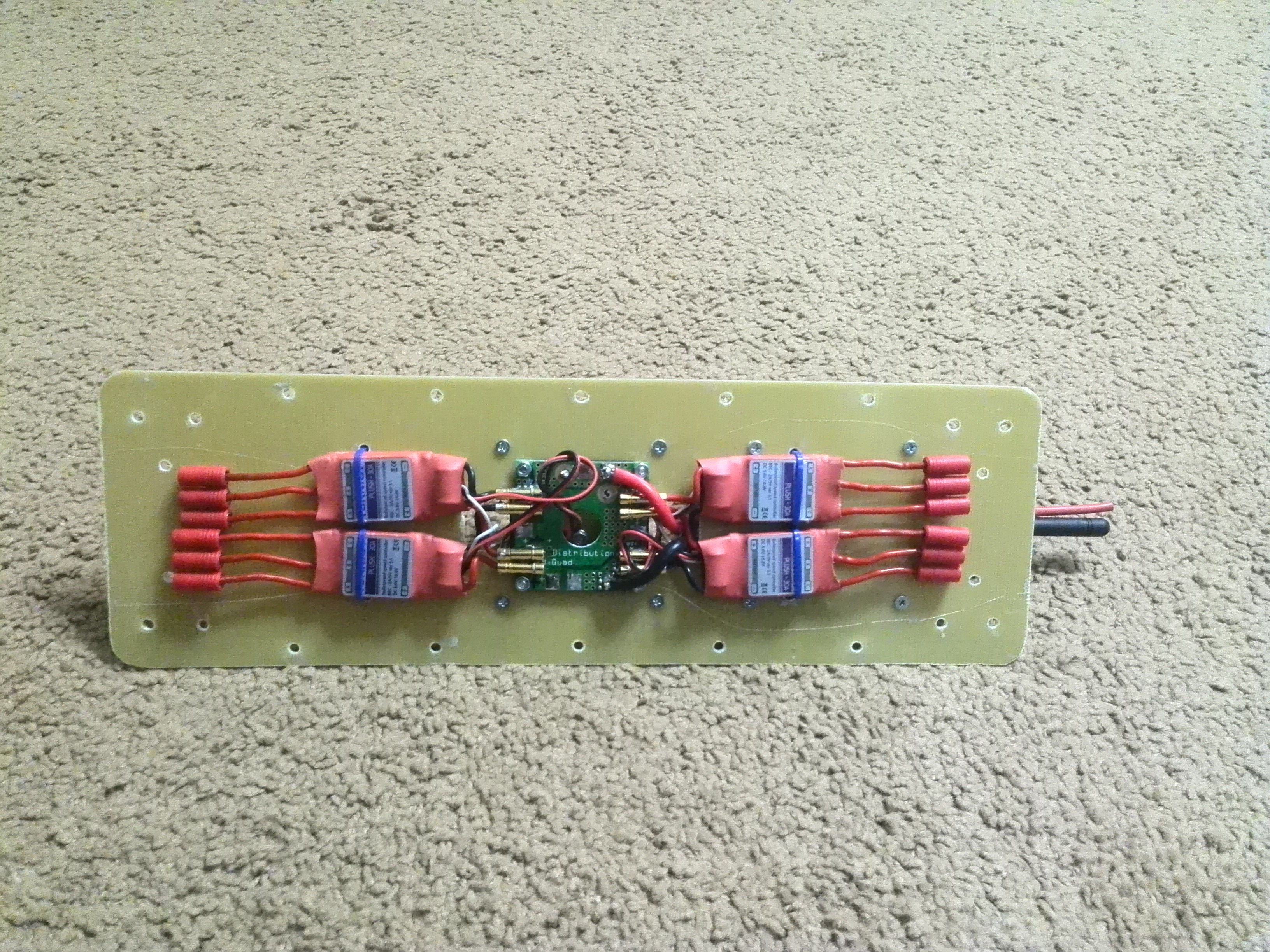
Это внутренняя часть верхней платины, на которой закреплены плата разводки питания и регуляторы
А это верх, на котором смотрированы плата управления в корпусе, приемник, и телеметрия.
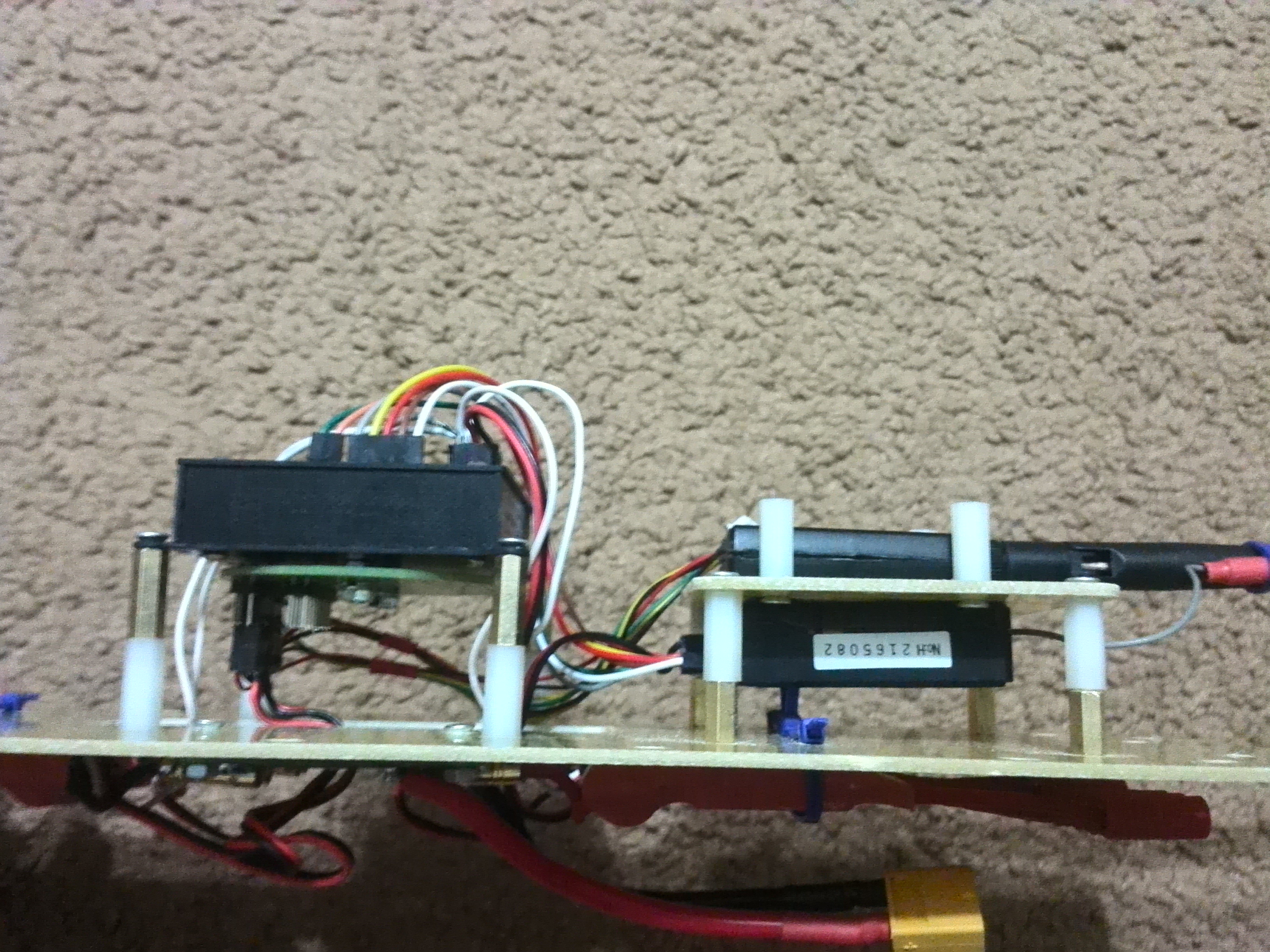
Вид сверху.

Хотелось бы акцентировать внимание на питании: я запитал все электронные компоненты отдельно от свего бека регулятора: контроллер, приемник, телеметрия, ЖПС - вот и все 4 бека заняты.
Многие, я думаю, со мной не согласятся с таким методом разводки питания, но мне показалось, что так нагрузка будет распределена между всеми БЕКами. И если уж регулятор выгорит, то коптер все равно упадет, так как на 3 пропах врятли смогу я посадить коптер. Хотя, наверное, в итоге я поставлю отдельный UBEC ампер на 8 для питания всей электроники разом. В общем, жду ваших мнений по данному вопросу.
Затем собираю полностью основную часть.
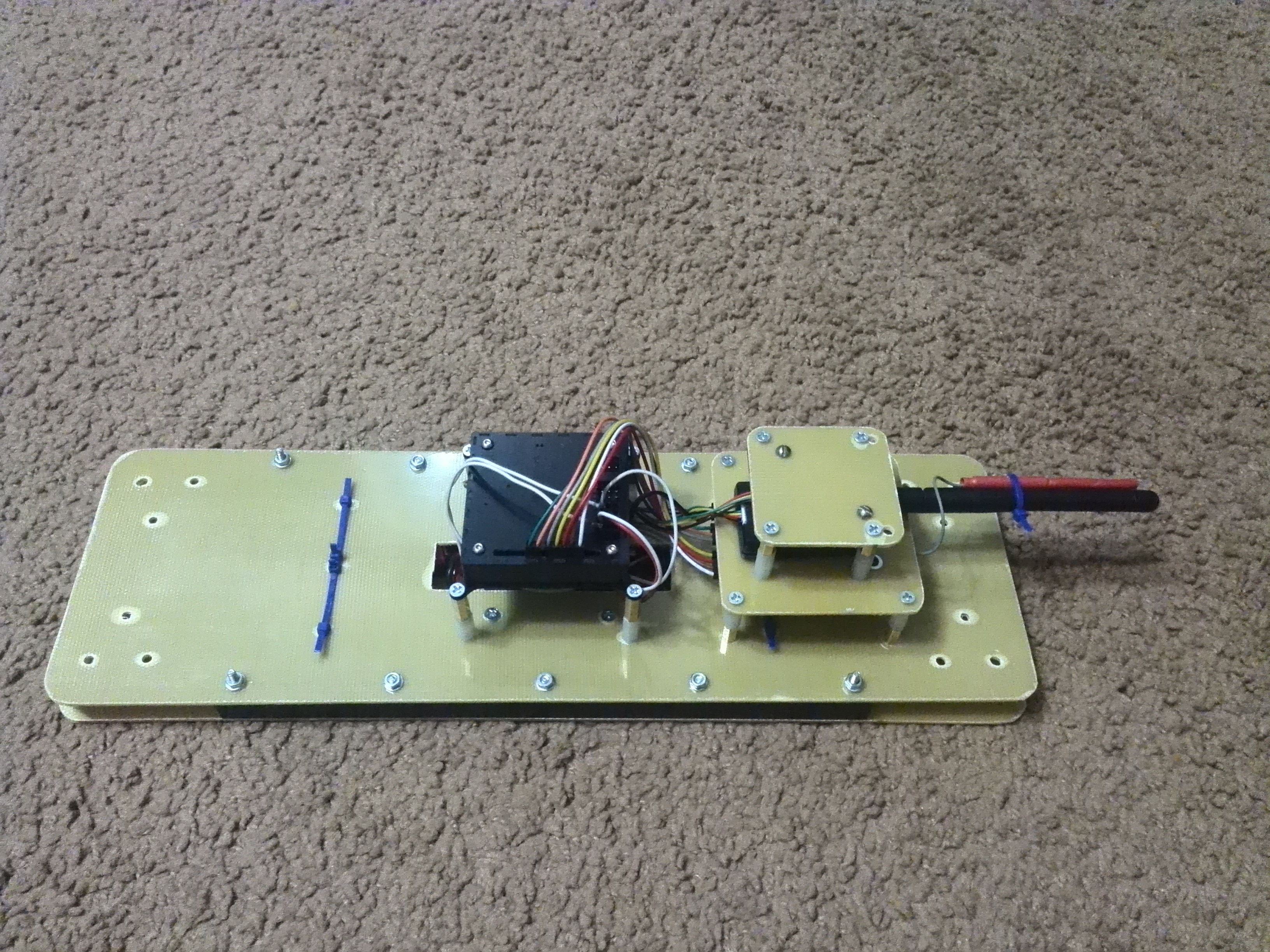
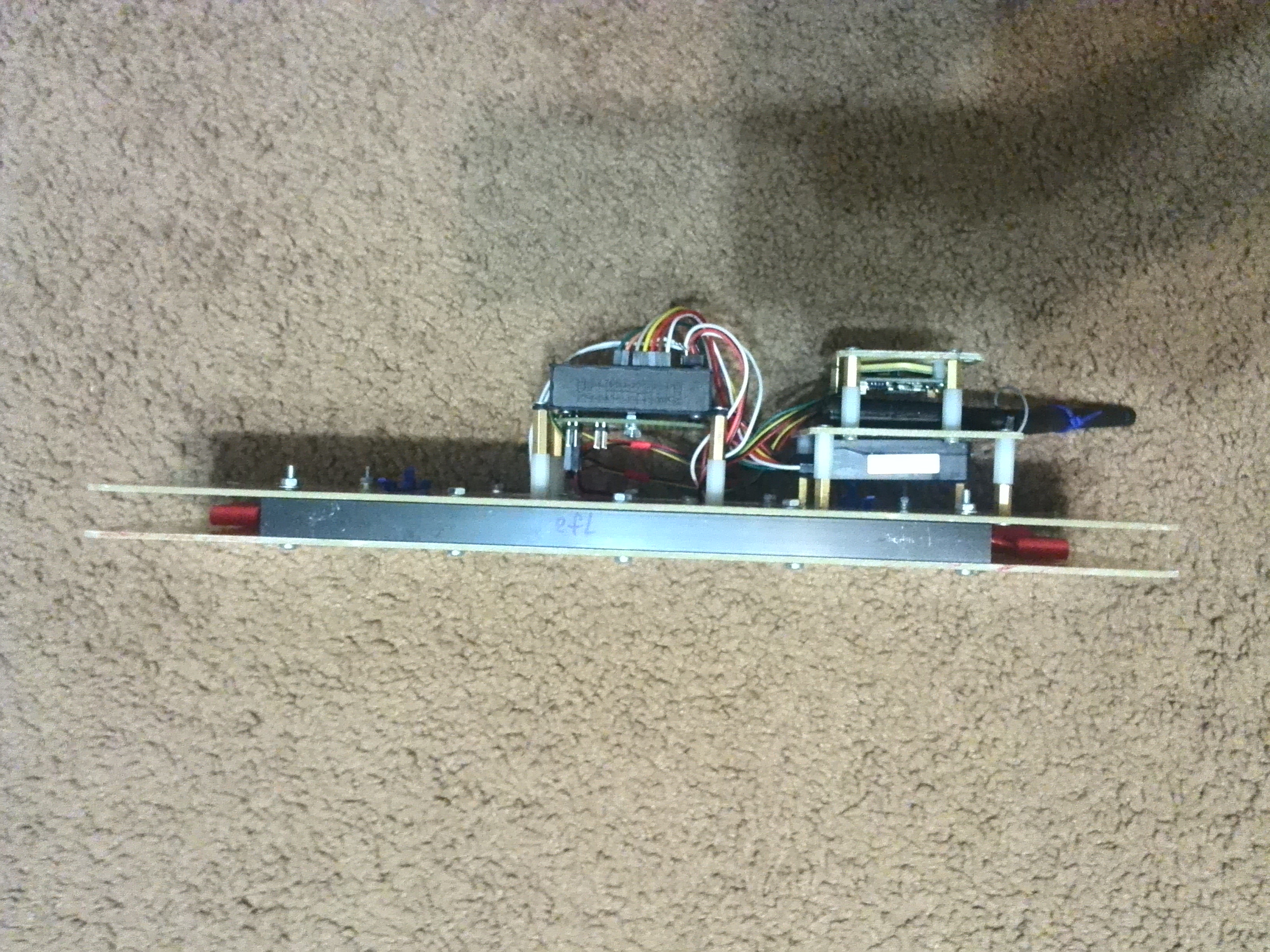
Появился ЖПС модуль с своей собственной "крышей" над головой для защиты. Ниже - вид сбоку на все это дело.
В дальнейшем, собираем лучи в купе с крепежом для двигателей и самими двигателями, подключаем двигатели к регуляторам (советую сразу подключать так: по-диагонали - одинаково, соседние двигатели подключаются зеркально - для обеспечения разнонаправленности вращения двигателей).
В итоге, получаем вот примерно такое:
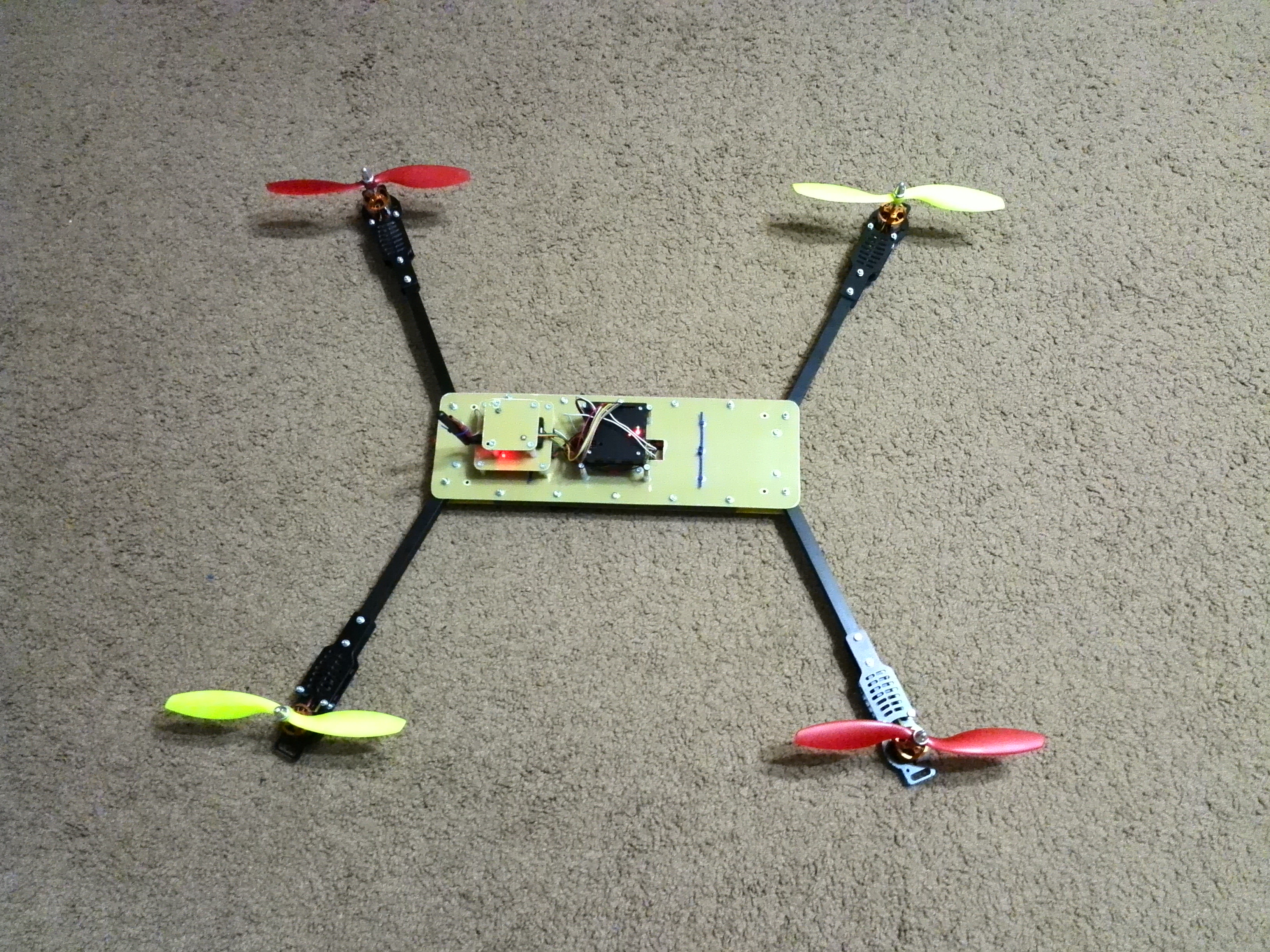
Видно, что он включен. Как я уже сказал, пропеллеры маловаты, но оторваться от земли получилось и на 5 метров отлететь от места взлета (видео нет, так как было не до съемок). Батарею закрепил на алюминиевые полоски, выгнутые по форме батареи (ноу хау тут уж точно нет), и я пока без посадочного шасси, но это сделаю попозже, как придумаю устраивающую меня конструкцию.
Вы, уважаемые читатели, наверное, удивились пустоте впереди - это место для курсовой камеры и прочей всей электроники для этого (но ее еще нет - денюшек нет - кризис е-мае).
В итоге, аппарат получился сейчас 1440 грамм, с посадочными шасси будет где-то 1500 грамм. По предварительным расчетам я подводил итог в 1490 грамм, так что расчеты очень хорошо совпали с практикой. Диаметр квадра - 760мм.
Вся электроника опробирована и в минусе (на балконе). ЖПС ловится, растет кокос телеметрия пашет оч хорошо (порядка 5 кирпичных стен - 95% сигнал).
Затрону немного вопрос о прошивке мегапиратом этого контроллера. Все это хорошо описано здесь: http://www.parkflyer.ru/blogs/view_entry/2608/
http://www.parkflyer.ru/78388/blogs/view_entry/3263/
http://aviamax.livejournal.com/54910.html
Воздайте этим труженникам плюсами!
Но стоит сразу сказать, что стоит заливать только 3.0.1 R3, так как в ней все нормально поддерживается, НО необходимо отредактировать файл в AP-hal-MPNG под названием RCinput_MPNG.cpp, в нем поменять надо
#define SERIAL_PPM SERIAL_PPM_INABLED
на
#define SERIAL_PPM SERIAL_PPM_DISABLED
в случае, если у вас нет PPM сигнала, если у вас с приемника выходит PPM, то все должно работать нормально.Вот моя конфигурация файла APM_config
// -*- tab-width: 4; Mode: C++; c-basic-offset: 4; indent-tabs-mode: nil -*-
// User specific config file. Any items listed in config.h can be overridden here.
// Select Megapirate board type:
#define MPNG_BOARD_TYPE CRIUS_V1
/*
RCTIMER_CRIUS_V2 -- (DEFAULT!!!) Use ONLY for RCTimer CRIUS V2 board
CRIUS_V1 -- Use this define for RCTimer CRIUS V1(1.1) board and all HobbyKing AIOP boards
HK_RED_MULTIWII_PRO -- HobbyKing MultiWii Pro board with ITG3205 and BMA180, BMP085 sensors
BLACK_VORTEX
*/
#define SERIAL_PPM SERIAL_PPM_DISABLED
#define TX_CHANNEL_SET TX_mwi
/*
TX_set1 //Graupner/Spektrum PITCH,YAW,THROTTLE,ROLL,AUX1,AUX2,CAMPITCH,CAMROLL
TX_standard //standard PPM layout Robbe/Hitec/Sanwa ROLL,PITCH,THROTTLE,YAW,MODE,AUX2,CAMPITCH,CAMROLL
TX_set2 //some Hitec/Sanwa/others PITCH,ROLL,THROTTLE,YAW,AUX1,AUX2,CAMPITCH,CAMROLL
TX_mwi //MultiWii layout ROLL,THROTTLE,PITCH,YAW,AUX1,AUX2,CAMPITCH,CAMROLL
*/
#define CONFIG_BARO AP_BARO_MS5611_I2C
// Currently not supported
#define CONFIG_SONAR DISABLED
//#define COPTER_LEDS DISABLED
#define SERIAL0_BAUD 115200 // Console port
#define SERIAL2_BAUD 38400 // GPS port
#define SERIAL3_BAUD 57600 // Telemetry (MAVLINK) port
// GPS driver selection
#define GPS_PROTOCOL GPS_PROTOCOL_AUTO
/*
GPS_PROTOCOL_AUTO (Default)
GPS_PROTOCOL_NONE
GPS_PROTOCOL_NMEA
GPS_PROTOCOL_SIRF
GPS_PROTOCOL_UBLOX
GPS_PROTOCOL_IMU
GPS_PROTOCOL_MTK
GPS_PROTOCOL_HIL
GPS_PROTOCOL_MTK19
*/
#define FRAME_CONFIG QUAD_FRAME
/*
QUAD_FRAME
TRI_FRAME
HEXA_FRAME
Y6_FRAME
OCTA_FRAME
OCTA_QUAD_FRAME
HELI_FRAME
*/
#define FRAME_ORIENTATION X_FRAME
/*
PLUS_FRAME
X_FRAME
V_FRAME
*/
//#define HIL_MODE HIL_MODE_SENSORS // build for hardware-in-the-loop simulation
//#define HIL_MODE HIL_MODE_ATTITUDE // build for hardware-in-the-loop simulation
// If Arduino IDE hang while uploading firmware to your board, try to change string below, just enter some random characters
#define BOOTLOADER_BUGFIX "234fs34567"
// User Hooks : For User Developed code that you wish to run
// Put your variable definitions into the UserVariables.h file (or another file name and then change the #define below).
//#define USERHOOK_VARIABLES "UserVariables.h"
// Put your custom code into the UserCode.pde with function names matching those listed below and ensure the appropriate #define below is uncommented below
//#define USERHOOK_INIT userhook_init(); // for code to be run once at startup
//#define USERHOOK_FASTLOOP userhook_FastLoop(); // for code to be run at 100hz
//#define USERHOOK_50HZLOOP userhook_50Hz(); // for code to be run at 50hz
//#define USERHOOK_MEDIUMLOOP userhook_MediumLoop(); // for code to be run at 10hz
//#define USERHOOK_SLOWLOOP userhook_SlowLoop(); // for code to be run at 3.3hz
//#define USERHOOK_SUPERSLOWLOOP userhook_SuperSlowLoop(); // for code to be run at 1hz
Если кому-то надо помочь - прикреплю потом архивом все фалы (распаковали и прошили).
Калибровка и настройка отдельных элементов очень хорошо описана в тех статьях. Я делал по ним - все было хорошо. Что не очень хорошо - поправлено в комментах.
P.S. Продолжение будет уже с камерой и полетами от первого лица. Но нескоро. Сейчас же займусь точной настройкой ПИдов, если потребуется - перепрошью регули, поменяю пропы и как потеплеет - на улицу. А пока попробую летать на работе. Если буду уверенно себя чувствовать, таки сниму видео и прикреплю.
P.P.S. Жду комментариев и предложений. А для минусаторов у меня большая фига в кармане и наплевательское отношение к рейтингу!
Всем спасибо!













Ну, как на счет "защелок" не знаю, но крепления вот http://www.parkflyer.ru/78388/product/1085514/. А вообще, напишите именно Александру (кнопочка "ответить"), тогда ему придет ууведомление на мыло и он ваам ответить что он и где брал)
Я резко почувствовал себя ничтожестом увидев это) Ну и оборудование у вас...чего только Naza V2 стоит) ну и винты карбон, подвес, камера, двигатели...
Есть только одна проблема в таком коптере: если его нечаянно шмякнуть о лицо земли, много оборудования может пострадать. В частости камера с подвесом и ЖПС.
Мой конструкшн рассчитан на деревянного пилота (меня) и максимальную защиту электроники (моторы можно перемотать, вал поменять, раму выточить, а вот электронику жалко)
В общем, обязательно пишите! и фото/видео обязательно)
Сколько КВ движки (650 вроде? пропы вроде 11 карбон), батарея (вроде 4S) - ???? mA, сколько вышел взлетный вес и сколько время полета?
Я так понял - ФПВ пока нет и не планируется?
Попробуем посчитать:
1) Рама 286 г (гуд)
2) ФПВ - грамм 100, не больше
3) движки ??? грамм 70-100 на штуку? Пусть 100. х 4
4) реги - думаю, грамм 30-40 на штуку. х 4
5) гопро - 100 грамм
6) вес назы - не знаю - думаю 50-100 грамм Пусть 100.
Имеем - 1146 грамм без акка - чистый вес. Акк - грамм 400-500. Где ещё 300-400 грамм?
Да, я забыл БЕК - грамм 30-40. Что ещё?
А, понял! подвес!!!! Я дал правильную калькуляцию?
Под акком значит ФПВ воткнуто - я думал модем 3DR - телеметрия....
Может вам надо попробовать бОльшие пропеллеры? на 650КВ должны пойти 13 пропы. Если позволит рама. Время полета увеличится (но и парусность тоже к сожалению)
Спасибо за конфигуру. Просто через два месяца начну комплектовать третий по счету квадр - прикидываю сейчас. Ваша рама заставила задуматься.
Народ: аиоп криус2 с рц-таймера, прош. мегапират-3.0.1-r3, Х-квадр, перед вроде по стрелке на плате. Третий день пытаюсь откалибровать аксель постоянно пишет о неудаче.
Может что в скетчах поправить нужно?