В один прекрасный и солнечный весенний день в карьере...


Солнце, тепло (жарко!), выходной. Всё готово для FPV. Еду!
С авто сложены все железяки, аппаратура и туристические стол со стулом, чтобы во приятности управлять квадром...
Приехал в точку О ОДИН! :)

Там какой-то 100-рож, ох,ранник, SECЮрий-ти нерусский. Можно, грю, запустить ВОТ ЭТО - показываю коптер. "Мозна", говорит, толко масыну пиристаф... Ок, переставил! Раскладываюсь обстоятельно! Стол, на нём нетбук, монитор, всё соединил-подключил, коптер подрубил...
Тут подходит это чудо и говорит - "неее, низя. Надо уезжать". Мать-перемать, я ж тя спросил, блин!
Насяльнике мозет приехыть, пакалотникэ кладовать будэм...
Выматерился, собрался в обратном порядке и выдвинулся на точку два. Осмотрелся, поссс... эээ оросил карьер сверху, почесал репу, решил FPV не доставать, сначала попробовать визуальные полетухи.
Сделал компассмот, ибо навесил видеопередатчик и OSD. Дождался хорошего кол-ва спутников и годного HDOP, заармил и полетел...
Ну как полетел. Шатал-мотал, тудым-сюдым... Высоту в АльтХолде вроде держал. В лойтере висеть не висел, а слонялся. Потом вдруг начал давать кругаля куда-то в сторону карьера (минус 10 метров).
Вывел его из-под ямки, увёл в сторону поля-леса подальше метров на 50...
И вот тут началось. Коптер не остановился, а продолжал лететь дальше от меня.
В лойтере на симпле. Правый стик к себе... Коптер продолжает удаляться, я его уже почти потерял из виду. Стик к себе... Жду... Коптера уже не слышно и не видно.
Начинаю подочковывать, дёргаю переключатели режимов оба на себя - врубаем режим RTL. На столике рядом стоит нетбук с подключенной телеметрией. Проверяю. Режим RTL включился. Жду... Смотрю в небо... Коптера не видно!
Смотрю в нетбук. Судя по картинке - коптер рисует какие-то загогулины, тусуясь практически на одном месте на высоте 40 метров. Смотрю на окно показаний. RTL включен. Ничего не понимаю.
Жду. Очкую уже почти под себя. Коптер начинает двигаться. Вроде в мою сторону. Потом делая петлю и возвращается обратно.
Волевым решением решаю переключить коптер в стаб и вести его "по приборам", т.е. по телеметрии!
Переключатели режимов вверх, щёлк. Газ на 60-70 процентов, потом подровняем. И... О УЖАС! Телеметрия показывает резкое падение высоты. ПОЛНЫЙ ГАЗ!!! Реакции ноль...
40...
30...
20...
0...
-11 метров...
На автомате возвращаю газ в ноль и делаю дизарм...
Шок...
Аппарата не видно.
Где упал - непонятно.
Не на дереве - 90%, ибо минус 11 метров. Подозрительно кошусь направо. Карьер... Вода... Твою ж мать!
Тут у меня начинается лёгкий психоз. Зачем-то хватаю нетбук, пульт и начинаю движение в сторону вероятного падения. На ноуте-то нет GPS... ГыГы... Справа карьер (минус 11 метров, ага, но я еще не врубаюсь), слева поле за колючей проволокой (привет, Свободная Россия), прямо - лес и за ним деревня.
Карта места действия:

Возвращаюсь. На нервяке бросаю ноут в машину. Беру расстояние от точки взлёта до последнего места - 380 метров. Хватаю смартфон, врубаю GPS - побежали... На расстоянии 360-400 метров обшариваю радиус. Останавливаюсь. Прислушиваюсь. Хрен там. Если даже и пищит поисковик на квадре - хрена чего слышно. Шумит трасса, ветер шуршит деревьями и ОРУТ птицы...
Добегаю до деревни, пролезаю через колючку, на поле... Ага! Что-то блестит, похоже на коробку с мозгами! Нет... пакет... Блин...
Жарко. А я в кофте...
Возвращаюсь к машине... Хлебаю водицы, успокаиваюсь. У меня же везде GPS, какого ж я... Глубокими вздохами снимаю тупняк. Пялюсь на координаты падения коптера. Ввожу в Navitel на смартфоне. Опа... Неувязочка. Mission Planner даёт координаты в градусах и секундах, а Навител берёт в град-мин-сек. Ввожу - ага, щас, "до точки 45 км". Иди ты в [censored 8 раз]. Судорожно ищу в настройках метод ввода координат. Не нахожу...
Спокойно, спокойно... Второй, третий раз лазаю по настройкам Навитела... Собаки, куда ж вы засунули их... ЕСТЬ! Нашел!!! Вводим... Спокойно... Проверяем... Сохраняем точку. Курсор-Поехали, Есть! Вода-пить, машина-закрыть, кофта-снять, телефон-рука, нога-идти!
Итак, 380 метров. Вперёд! Прохожу полем, залезаю на тропинку в пролесок (её видно будет на съёмке с борта). Так, азимут - в карьер. Значит всё-таки внизу...
Только бы не в воду, только бы не в воду... Точка на карте предательски показывает воду. Но только РЯДОМ!
Подхожу к краю карьера... Мдэээ... Минус одиннадцать метров. Так вот вы какие... Ладно, цепляяь за березки и осины потихоньку спускаюсь на дорогу вниз. Опасносте, ололо! Без происшествий. Уже хорошо! Поглядывая на экран плетусь мимо живописного пруда, заросшего тиной с подозрительно большой проплешиной в ней... Нет, вряд ли это коптер проделал такую дырень...
Обхожу пруд и... вижу ЕГО! Стоит о четырёх ногах, как положено, невозмутимо продолжая снимать Мёбиусом приятный кусок песка перед собой и небо вверху. Радостно и витиевато матерясь поднимаю коптер. Выключаю камеру. Осматриваю... Все пропеллеры целы, аппаратура вся на месте. Из повреждений видимых - погнута одна лапа и деформирован луч. При падении удар пришёлся на камеру около линзы - явная вмятина на пластике! Повезло!
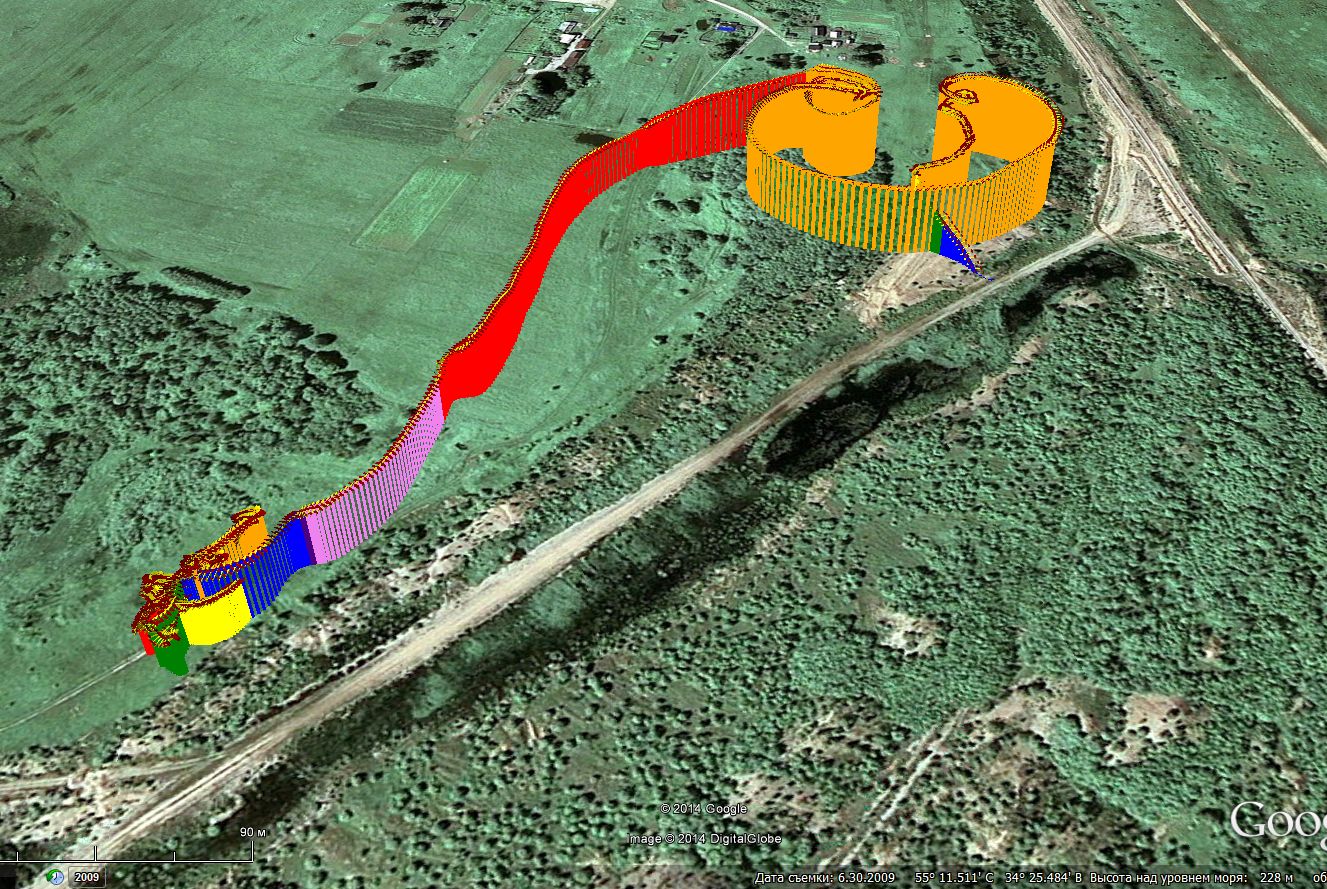
Карта "полёта". Синий язычек в правом верхнем углу ввиде рвотного позыва "бууээээ" - место падения, успел переключиться в Стаб и рухнул! Оранжевые красивые бараньи рога - это RTL. Красиво, правда? Жаль, что нихрена не возврат на базу, а так вполне себе симпатишное творчество коптера...

Отпускает... Чуть потряхиваясь, иду обратно к точке взлёта... Печёт солнце. В одной руке телефон, в другой - негодный улетунчик! Прохожу озерки, вагончик сторожа... Тэээк. Автомобиль где-то порядка 11 метров вверху... А обходить - еще с километр. Что делать. Пыхтя, карабкаюсь вверх, спасибо берёзкам, цепляюсь, отталкиваюсь, спасибо кроссам Рибок (не реклама! гыг!). Вскарабкиваюсь. Вот он автомобиль, вот он коптер, вот он я! Жив, цел, орёл...
Отпускает... Лью воду на руки, на голову, на лицо... Фуф... Машина, кондиционер, дом... Смотрю видео, сливаю логи... Не понимаю, что случилось. Перекосило компас, коптер потерял ориентацию и вместо того, чтобы лететь КО мне - пёрся ОТ меня? Видимо поэтому не отработал RTL - просто слонял коптер в округе, не приближая его к точке старта. Датчик V и A ругается на FS по напряжению, не калибровал я его, каюсь, но и FS_Battery благоразумно отключил. Вижу, что моё переключение в стаб и резкая потеря высоты просто совпало по времени с разрядом аккума и экстренным снижением-падением коптера.
Фуф... В очередной раз пронесло. Хватит бы уже испытывать везение и пора начинать более серьезно подходить к подготовке полётов.
Сетап:
APM 2.5 на прошивке 3.0.1 + UBLOX GPS + телеметрия 915 + FrSky + Turnigy 9XR.
Для любителей поковыряться в логах: ЛОГ
Также Вы можете пережить весь этот жутко счастливый кошмар вместе со мной, посмотрев на полёт глазами телеметрии! Грузим этот ТЛОГ в Mission Planner (Логи телеметрии/Загрузить/Play)
Видео полёта с момента старта до момента падения. Маты в момент обретения коптера я оставил за кадром... Уж больно там всё... матерно! :)
ЗЫ Под крышкой "банки с мозгами" была просьба связаться со мной и указан номер телефона, так что шанс обрести коптер в начале недели, даже если бы я его не нашел был достаточно велик. Очень рекомендую обязательно такую "закладку", даже если вы уверены на 100% в своём железном друге!
ЗЫЫ Да, я осёл, олень и другой зоопарк. Впредь (в очередной раз) постараюсь быть осторожнее!
ЗЫЫЫ Мои приключения с платой APM не означает, что плата - говно и на ней нельзя летать. Это моё личное недоразумение и тот же Юрий К., всем здесь хорошо известный, подтвердит, что плата прекрасная!
Всем удачи в полётах и жизни! :)
По просьбам листателей прилагаю FAQ по терминам:
RTL - режим, при включении которого порядочный коптер ДОЛЖЕН в автоматическом режиме вернуться в точку взлёта и прилично присесть там!
Лойтер - режим "висения" в одной точке по сигналу GPS.
Альт, Альтхолд - режим удержания заданной высоты.
FS - режим безопасного "спасения". В зависимости от настроек коптер при потере сигнала от радио, от GPS или падения напряжения батареи выполняет различные действия. Висит, садится или возвращается в точку взлёта.
FPV - фёст персон вьюууу - система управления коптером (любым ЛА, да хоть ослом) с наземного монитора, изо передаётся через радиоканал с камеры, установленной на ЛА.
OSD - он скрин дисплей - плата, встраивающая в видеосигнал с ЛА телеметрию (скорость, высоту, координаты GPS, заряд батареи и т.п.
С авто сложены все железяки, аппаратура и туристические стол со стулом, чтобы во приятности управлять квадром...
Приехал в точку О ОДИН! :)

Там какой-то 100-рож, ох,ранник, SECЮрий-ти нерусский. Можно, грю, запустить ВОТ ЭТО - показываю коптер. "Мозна", говорит, толко масыну пиристаф... Ок, переставил! Раскладываюсь обстоятельно! Стол, на нём нетбук, монитор, всё соединил-подключил, коптер подрубил...
Тут подходит это чудо и говорит - "неее, низя. Надо уезжать". Мать-перемать, я ж тя спросил, блин!
Насяльнике мозет приехыть, пакалотникэ кладовать будэм...
Выматерился, собрался в обратном порядке и выдвинулся на точку два. Осмотрелся, поссс... эээ оросил карьер сверху, почесал репу, решил FPV не доставать, сначала попробовать визуальные полетухи.
Сделал компассмот, ибо навесил видеопередатчик и OSD. Дождался хорошего кол-ва спутников и годного HDOP, заармил и полетел...
Ну как полетел. Шатал-мотал, тудым-сюдым... Высоту в АльтХолде вроде держал. В лойтере висеть не висел, а слонялся. Потом вдруг начал давать кругаля куда-то в сторону карьера (минус 10 метров).
Вывел его из-под ямки, увёл в сторону поля-леса подальше метров на 50...
И вот тут началось. Коптер не остановился, а продолжал лететь дальше от меня.
В лойтере на симпле. Правый стик к себе... Коптер продолжает удаляться, я его уже почти потерял из виду. Стик к себе... Жду... Коптера уже не слышно и не видно.
Начинаю подочковывать, дёргаю переключатели режимов оба на себя - врубаем режим RTL. На столике рядом стоит нетбук с подключенной телеметрией. Проверяю. Режим RTL включился. Жду... Смотрю в небо... Коптера не видно!
Смотрю в нетбук. Судя по картинке - коптер рисует какие-то загогулины, тусуясь практически на одном месте на высоте 40 метров. Смотрю на окно показаний. RTL включен. Ничего не понимаю.
Жду. Очкую уже почти под себя. Коптер начинает двигаться. Вроде в мою сторону. Потом делая петлю и возвращается обратно.
Волевым решением решаю переключить коптер в стаб и вести его "по приборам", т.е. по телеметрии!
Переключатели режимов вверх, щёлк. Газ на 60-70 процентов, потом подровняем. И... О УЖАС! Телеметрия показывает резкое падение высоты. ПОЛНЫЙ ГАЗ!!! Реакции ноль...
40...
30...
20...
0...
-11 метров...
На автомате возвращаю газ в ноль и делаю дизарм...
Шок...
Аппарата не видно.
Где упал - непонятно.
Не на дереве - 90%, ибо минус 11 метров. Подозрительно кошусь направо. Карьер... Вода... Твою ж мать!
Тут у меня начинается лёгкий психоз. Зачем-то хватаю нетбук, пульт и начинаю движение в сторону вероятного падения. На ноуте-то нет GPS... ГыГы... Справа карьер (минус 11 метров, ага, но я еще не врубаюсь), слева поле за колючей проволокой (привет, Свободная Россия), прямо - лес и за ним деревня.
Карта места действия:

Возвращаюсь. На нервяке бросаю ноут в машину. Беру расстояние от точки взлёта до последнего места - 380 метров. Хватаю смартфон, врубаю GPS - побежали... На расстоянии 360-400 метров обшариваю радиус. Останавливаюсь. Прислушиваюсь. Хрен там. Если даже и пищит поисковик на квадре - хрена чего слышно. Шумит трасса, ветер шуршит деревьями и ОРУТ птицы...
Добегаю до деревни, пролезаю через колючку, на поле... Ага! Что-то блестит, похоже на коробку с мозгами! Нет... пакет... Блин...
Жарко. А я в кофте...
Возвращаюсь к машине... Хлебаю водицы, успокаиваюсь. У меня же везде GPS, какого ж я... Глубокими вздохами снимаю тупняк. Пялюсь на координаты падения коптера. Ввожу в Navitel на смартфоне. Опа... Неувязочка. Mission Planner даёт координаты в градусах и секундах, а Навител берёт в град-мин-сек. Ввожу - ага, щас, "до точки 45 км". Иди ты в [censored 8 раз]. Судорожно ищу в настройках метод ввода координат. Не нахожу...
Спокойно, спокойно... Второй, третий раз лазаю по настройкам Навитела... Собаки, куда ж вы засунули их... ЕСТЬ! Нашел!!! Вводим... Спокойно... Проверяем... Сохраняем точку. Курсор-Поехали, Есть! Вода-пить, машина-закрыть, кофта-снять, телефон-рука, нога-идти!
Итак, 380 метров. Вперёд! Прохожу полем, залезаю на тропинку в пролесок (её видно будет на съёмке с борта). Так, азимут - в карьер. Значит всё-таки внизу...
Только бы не в воду, только бы не в воду... Точка на карте предательски показывает воду. Но только РЯДОМ!
Подхожу к краю карьера... Мдэээ... Минус одиннадцать метров. Так вот вы какие... Ладно, цепляяь за березки и осины потихоньку спускаюсь на дорогу вниз. Опасносте, ололо! Без происшествий. Уже хорошо! Поглядывая на экран плетусь мимо живописного пруда, заросшего тиной с подозрительно большой проплешиной в ней... Нет, вряд ли это коптер проделал такую дырень...
Обхожу пруд и... вижу ЕГО! Стоит о четырёх ногах, как положено, невозмутимо продолжая снимать Мёбиусом приятный кусок песка перед собой и небо вверху. Радостно и витиевато матерясь поднимаю коптер. Выключаю камеру. Осматриваю... Все пропеллеры целы, аппаратура вся на месте. Из повреждений видимых - погнута одна лапа и деформирован луч. При падении удар пришёлся на камеру около линзы - явная вмятина на пластике! Повезло!
Карта "полёта". Синий язычек в правом верхнем углу ввиде рвотного позыва "бууээээ" - место падения, успел переключиться в Стаб и рухнул! Оранжевые красивые бараньи рога - это RTL. Красиво, правда? Жаль, что нихрена не возврат на базу, а так вполне себе симпатишное творчество коптера...
Отпускает... Чуть потряхиваясь, иду обратно к точке взлёта... Печёт солнце. В одной руке телефон, в другой - негодный улетунчик! Прохожу озерки, вагончик сторожа... Тэээк. Автомобиль где-то порядка 11 метров вверху... А обходить - еще с километр. Что делать. Пыхтя, карабкаюсь вверх, спасибо берёзкам, цепляюсь, отталкиваюсь, спасибо кроссам Рибок (не реклама! гыг!). Вскарабкиваюсь. Вот он автомобиль, вот он коптер, вот он я! Жив, цел, орёл...
Отпускает... Лью воду на руки, на голову, на лицо... Фуф... Машина, кондиционер, дом... Смотрю видео, сливаю логи... Не понимаю, что случилось. Перекосило компас, коптер потерял ориентацию и вместо того, чтобы лететь КО мне - пёрся ОТ меня? Видимо поэтому не отработал RTL - просто слонял коптер в округе, не приближая его к точке старта. Датчик V и A ругается на FS по напряжению, не калибровал я его, каюсь, но и FS_Battery благоразумно отключил. Вижу, что моё переключение в стаб и резкая потеря высоты просто совпало по времени с разрядом аккума и экстренным снижением-падением коптера.
Фуф... В очередной раз пронесло. Хватит бы уже испытывать везение и пора начинать более серьезно подходить к подготовке полётов.
Сетап:
APM 2.5 на прошивке 3.0.1 + UBLOX GPS + телеметрия 915 + FrSky + Turnigy 9XR.
Для любителей поковыряться в логах: ЛОГ
Также Вы можете пережить весь этот жутко счастливый кошмар вместе со мной, посмотрев на полёт глазами телеметрии! Грузим этот ТЛОГ в Mission Planner (Логи телеметрии/Загрузить/Play)
Видео полёта с момента старта до момента падения. Маты в момент обретения коптера я оставил за кадром... Уж больно там всё... матерно! :)
ЗЫ Под крышкой "банки с мозгами" была просьба связаться со мной и указан номер телефона, так что шанс обрести коптер в начале недели, даже если бы я его не нашел был достаточно велик. Очень рекомендую обязательно такую "закладку", даже если вы уверены на 100% в своём железном друге!
ЗЫЫ Да, я осёл, олень и другой зоопарк. Впредь (в очередной раз) постараюсь быть осторожнее!
ЗЫЫЫ Мои приключения с платой APM не означает, что плата - говно и на ней нельзя летать. Это моё личное недоразумение и тот же Юрий К., всем здесь хорошо известный, подтвердит, что плата прекрасная!
Всем удачи в полётах и жизни! :)
По просьбам листателей прилагаю FAQ по терминам:
RTL - режим, при включении которого порядочный коптер ДОЛЖЕН в автоматическом режиме вернуться в точку взлёта и прилично присесть там!
Лойтер - режим "висения" в одной точке по сигналу GPS.
Альт, Альтхолд - режим удержания заданной высоты.
FS - режим безопасного "спасения". В зависимости от настроек коптер при потере сигнала от радио, от GPS или падения напряжения батареи выполняет различные действия. Висит, садится или возвращается в точку взлёта.
FPV - фёст персон вьюууу - система управления коптером (любым ЛА, да хоть ослом) с наземного монитора, изо передаётся через радиоканал с камеры, установленной на ЛА.
OSD - он скрин дисплей - плата, встраивающая в видеосигнал с ЛА телеметрию (скорость, высоту, координаты GPS, заряд батареи и т.п.













Проп: самые простые, пластик цветной.
с ОСД и FPV - неправильно понимаете. Можно "прокрутить", если стоит регистратор - то бишь на земле что-то ПИШЕТ видео! Иначе - если видеолинк еще есть - можно посмотреть, где лежит! :) Если картинка есть - всё просто, резко пишем координаты, удаление от базы (ну не говорите мне, что эту "лишнюю" информацию вы убрали с ОСД :)) и ищем по ним.
Поэтому отдельный экран.
Дописал, а то и правда нелогично выходило!
Я себе только пальчик чикал одним пропом. Уже зажило, только шрам будет на память.
Опасаться и быть предельно осторожным - необходимо!
А уж ТБ так и вообще никто не отменял - в первую очередь. Игрушка-игрушкой, да опасная в кривых руках!
У меня когда в лойтере унитазило и компассмот был высокий помогло:
1. Добиться компассмота 7% (уложил силовые провода в косичку и подальше от компаса)
2. в МП setup-erase и после этого заново полная калибровка.
После этого Loiter и RTL заработали замечательно.
Плюс
1. из за проблем с компасом коптер летит не туда куда следует. У меня была та же песня
2. Вибрации выше нормы. Ардупилотовцы рекомендуют добиваться не выше +-3
3. То же самое с компасом. Планируемое направление движения не совпадает с реальным.
- само-рама люминь (15x15x1.5)
- Turnigy Multistar 2216-800Kv + Plush 25A
- HKPilot 2.5 + UBLOX LEA-6H GPS
- Turnigy 9XR + FrSky DF
- non3DR Radio
- Mobius камера на запись/курсовая
- Видео 5.8g 600mw Tx & Rx Set TS832 and RC832
- наземка телеметрия через нетбук + монитор 9" для FPV
2200 Зиппи компакт - 10-12 мин.
3000 Зиппи флайтмакс - 14-16 мин.
Вот сейчас без акка и Мёбиуса, с видео,OSD и прочей лабудой - 1003 гр.
Нифига не понятно, о чём пишет автор в начале статьи. Эмоции да, но обилие узкоспециализированного жаргона не позволяют даже мне, любителю FPV-самолётов, понять о чём речь.
Ах, да. С находкой поздравляю!
А внизу словарик есть! :P
Спасибо!