
Доброго времени суток, уважаемые единомышленники.
Я веду кружок образховательной робототехники в Анапе (из конструктора LEGO мастерим несложных роботов на базе блока NXT Midstorms2.0, но речь пойдёт не об этом) , также увлекаюсь радиоуправляемыми авиамоделями.
Совсем не давно ко мне за советом обратился знакомый студент 4-го курса. Попросил оказать помощь и содействие в постройке какого-либо простенького робота для демонстрации возможностей современного и не дорогого оборудования, доступного любому желающему.
Предлагаю посмотреть процесс постройки и, возможно, предложить какую-то свою идею.
За основу шасси мы взяли автомодель, принадлежащую студенту (прошу прощения, но в машинках я не разбираюсь), практически все остальные делали из ПВХ 3мм.
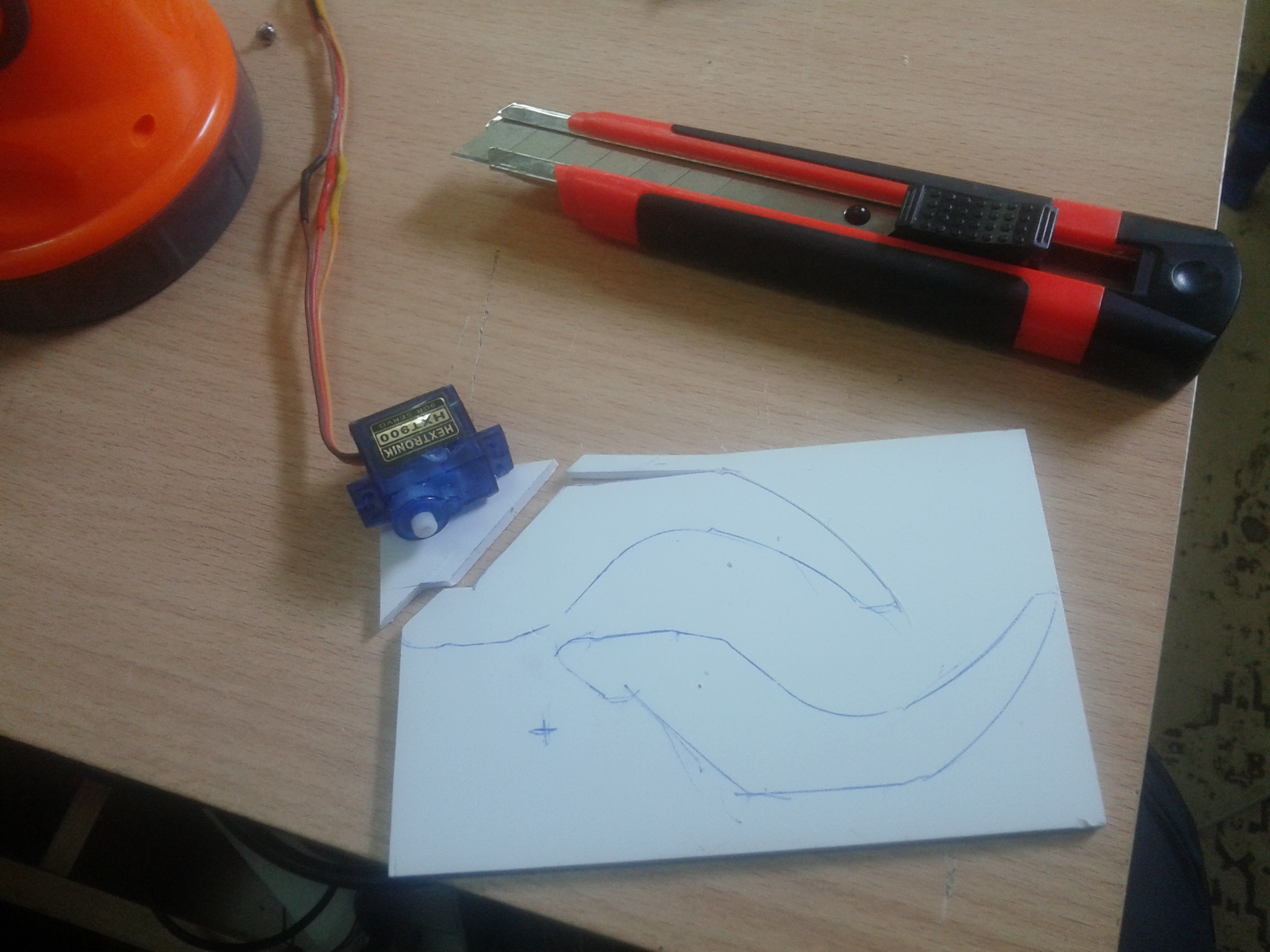
Начали с изготовления вот таких вот "усиков" - это можно сказать "пальцы" нашего захвата.
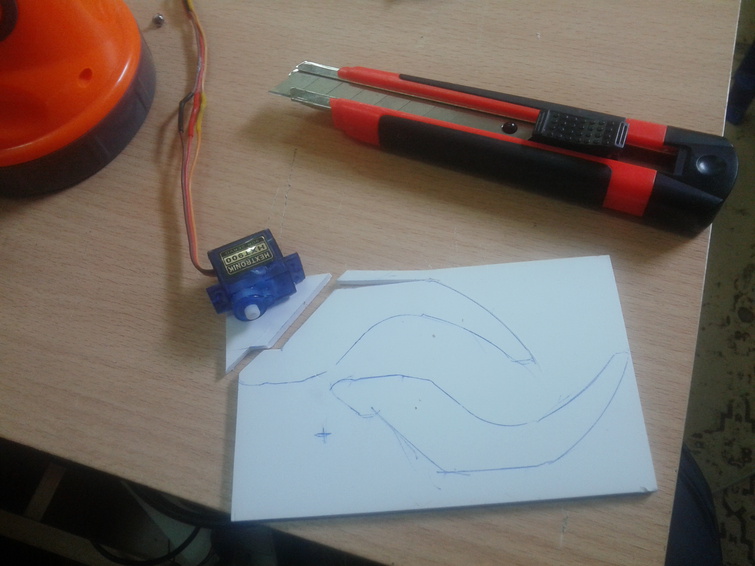
Затем приклеели на цеакрин качалки для маленьких сервочек, которые будут осуществлять захват какого-то объека (в нашем случае это будет банка из под газировки объёмом 0.33)

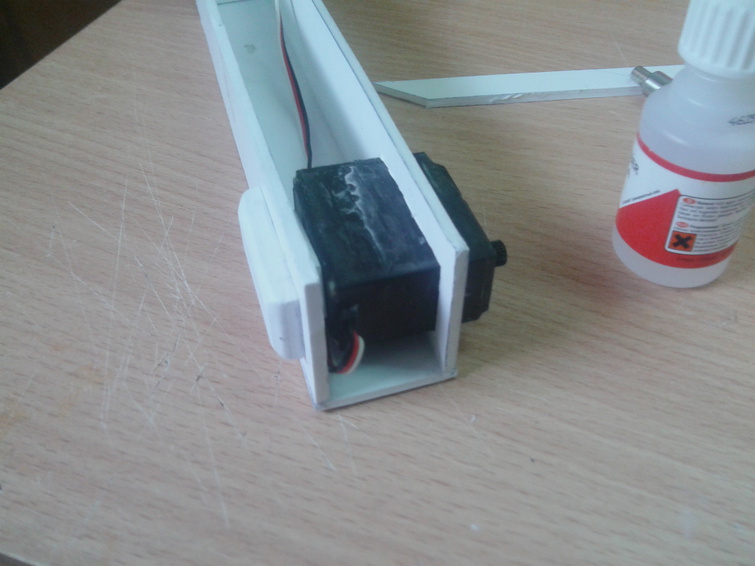
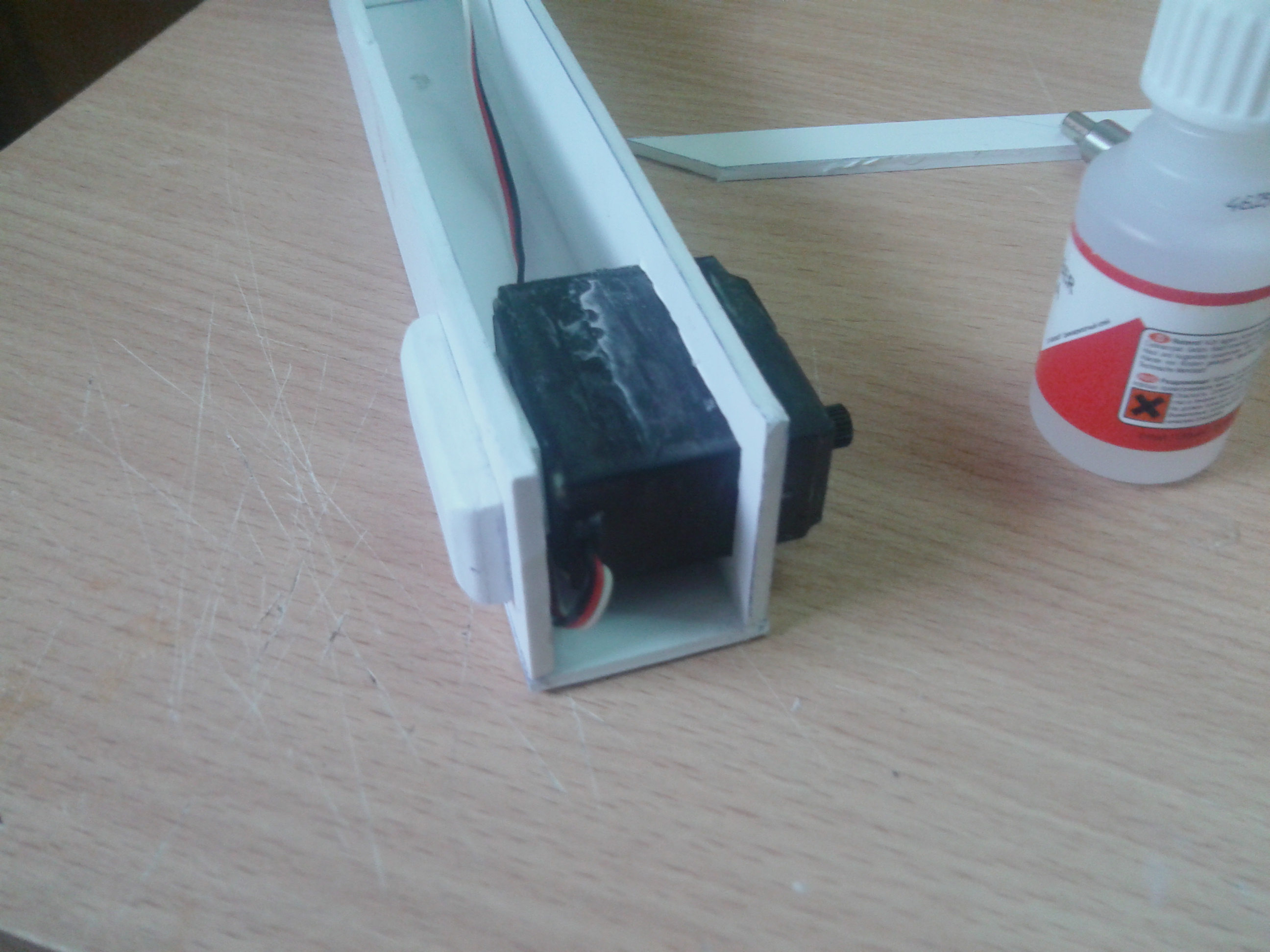
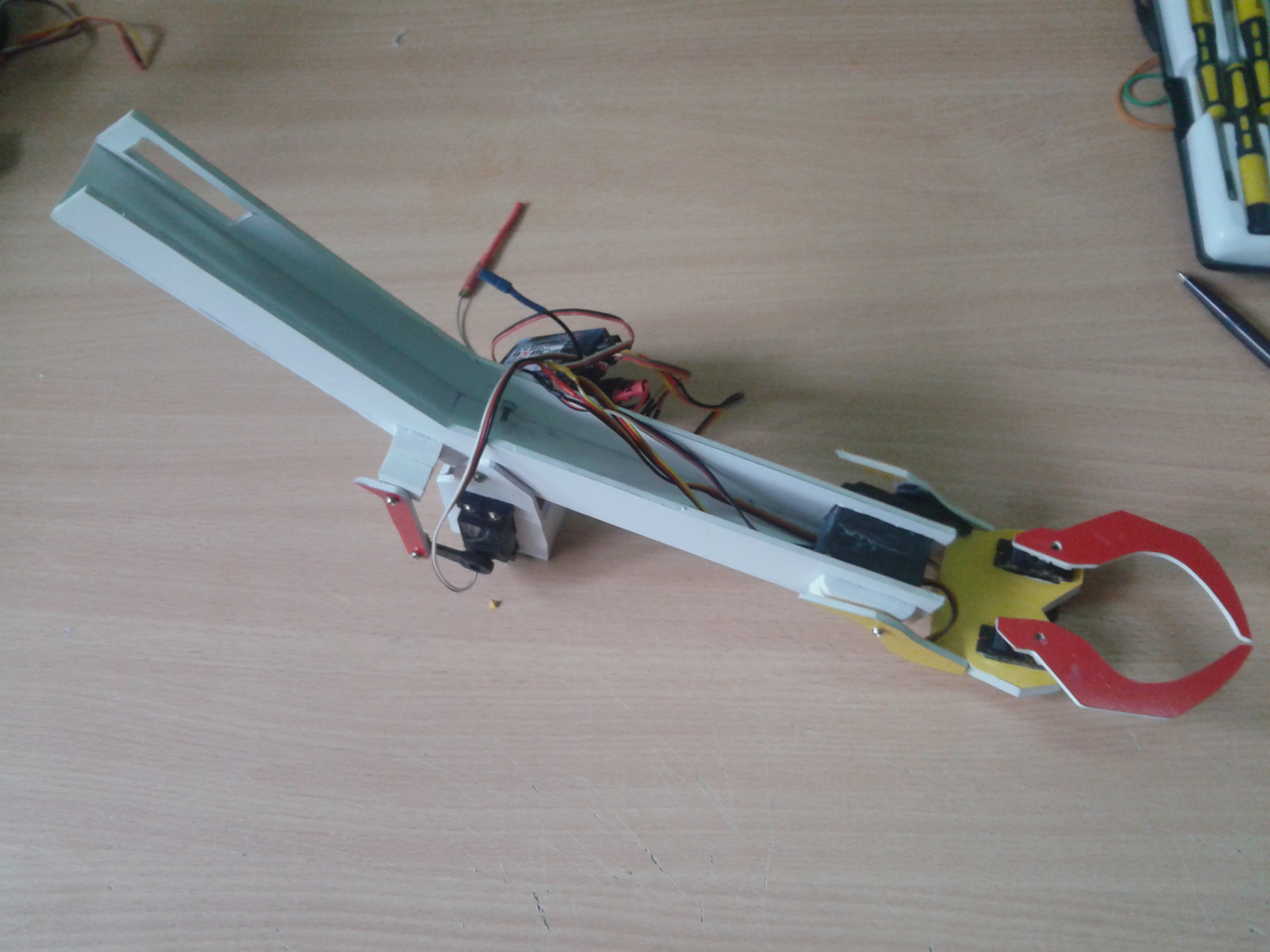
Строительство продолжилось изготовлением несущей балки, стрелы или, как мы её назвали, "руки".

Предусмотрев место под стандартные сервоприводы, сразу примерили как они будут там установлены

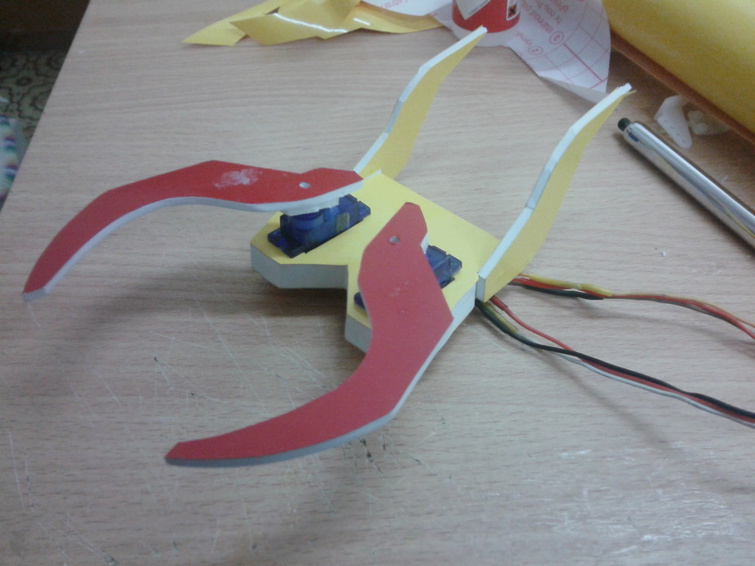
Продолжаем делать захват (мы, конечно же, обозвали это просто - "хваталка").
Из кусочка ПВХ 8 мм. изготовили произвольной формы площадку для размещения "хватательных" сервочек.

Чтобы скрыть ненужные полоски и добавить яркого цвета в нашу конструкцию мы решили сделать наклейку из жёлтого аракала (самоклеющаяся плёнка) , по той же технологии изготовили качалки (тоже произвольной формы) из ПВХ 3 мм.

Наша "хваталка" готова к установку на "руку", но для этого нам нужно на балке выровнять расстояние между качалками "хваталки". Для этого мы приклеели не большую площадку

Для того чтобы наша стрела смогла бы наклоняться вверх и вниз мы изготовили вот такую станину. Подбирая габариты нам нужно было предусмотреть место для ещё одного сервопривода.

Соединили полученные конструкции и получили вот такое устройство (вот уже что-то вырисовывается =) )

Теперь, чтобы конструкция приобрела более приятный глазу вид, проложили внутри балки провода, закрыли крышечкой и начали обклеивать черной самоклейкой

В роцессе постройки мы приняли ещё одно дизайнерское решение - добавить диагональные полосы жёлтого цвета, как и в настоящей мощной промышленной технике

Соединили и получили , на мой взгляд, достаточно симпатичную конструкцию

На машинку установили из ПВХ 3мм площадку с сервоприводом посередине
На неё установили на качалке поворотную платформу, на которой будет располагаться аккумулятор, приёмник и само подъёмо-опускаемое устройтво - наша "рука".
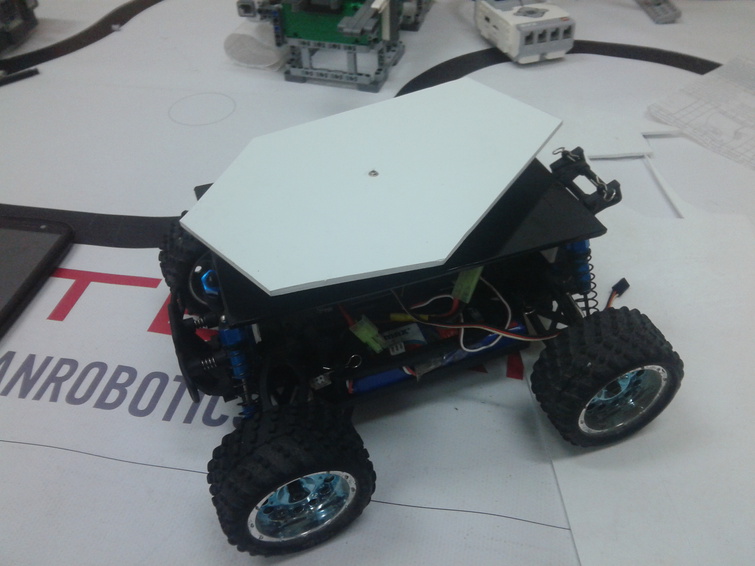
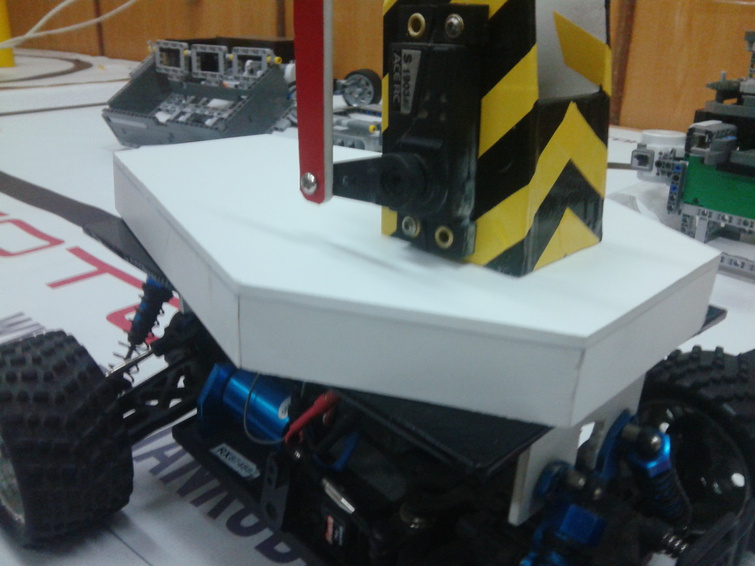
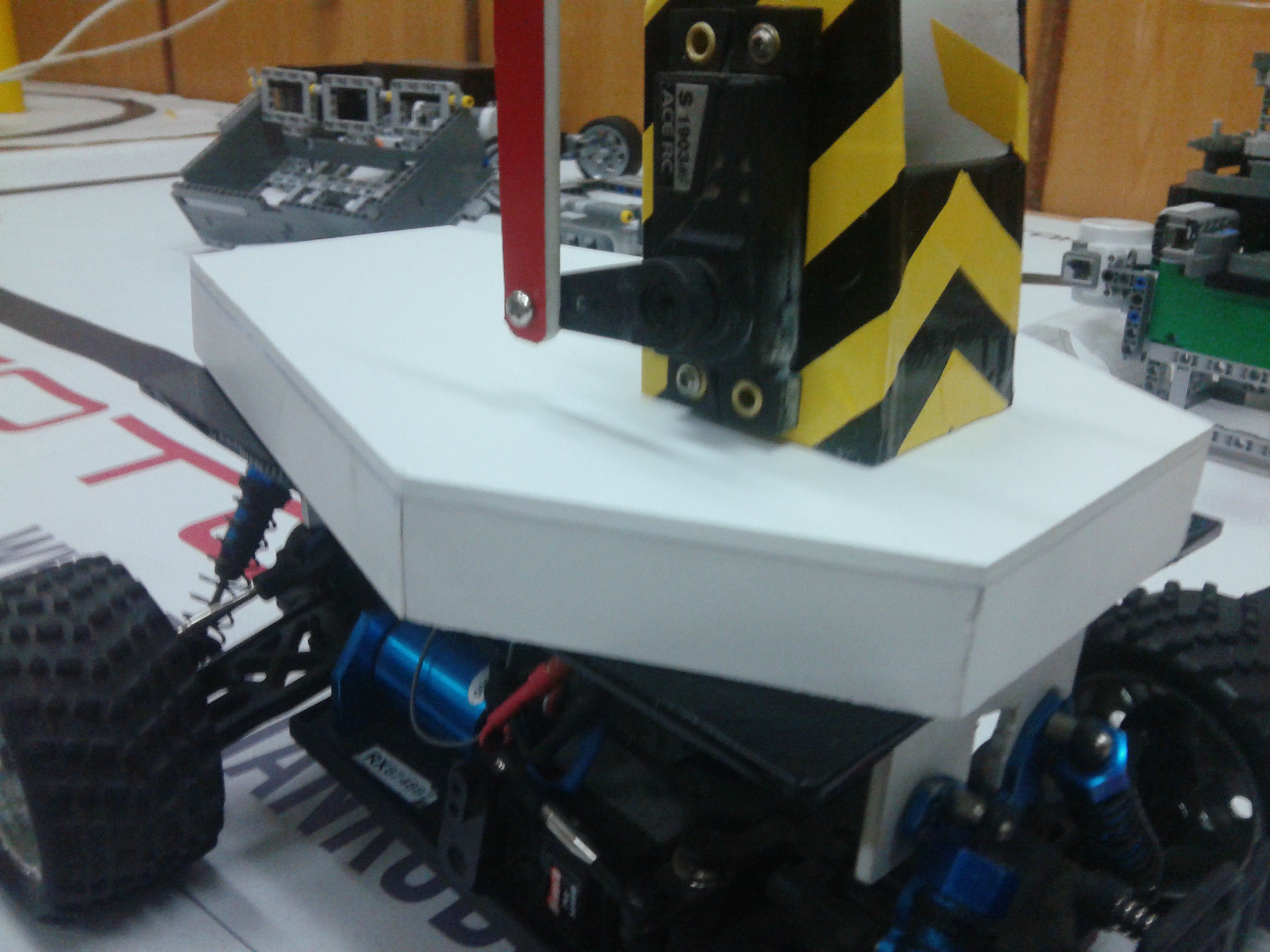
Но когда начали устанавливать оборудование, столкнулись с серьёзной пробллемкой. Из-за одной точки опоры (на оси привода) конструция во время движения шасси и поворотов могла сломаться, по этому мы решили приделать так называемую "Юбку", которая скользила бы по чёрной площадке, внося в конструкцию дополнительную надёжность.
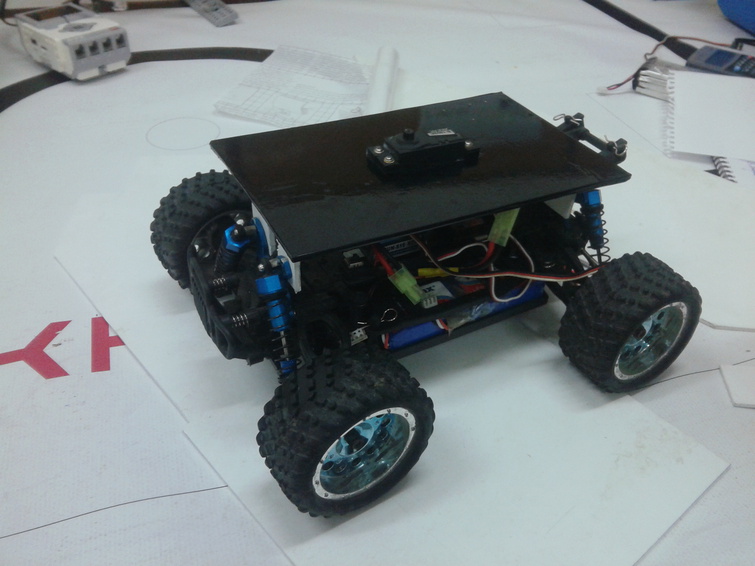
Теперь устанавливаем всё на поворотную площадку и проверяем. Получился вот такой маленький управляемый робот.


Для упраления использовалась аппаратура Turnigy 9х.
Видеоролик выложу познее...
Так же мы планируем установить на заднюю сторону стрелы ФПВ передатчик с видеокамерой - это даст нам дополнительное преимущество в механике - т.е. дополнительный противовес, ну и само-собой дистанционное управление там, где человеку будет невозможно работать... например, в условиях загазованности или радиационо опасных местах...
Я веду кружок образховательной робототехники в Анапе (из конструктора LEGO мастерим несложных роботов на базе блока NXT Midstorms2.0, но речь пойдёт не об этом) , также увлекаюсь радиоуправляемыми авиамоделями.
Совсем не давно ко мне за советом обратился знакомый студент 4-го курса. Попросил оказать помощь и содействие в постройке какого-либо простенького робота для демонстрации возможностей современного и не дорогого оборудования, доступного любому желающему.
Предлагаю посмотреть процесс постройки и, возможно, предложить какую-то свою идею.
За основу шасси мы взяли автомодель, принадлежащую студенту (прошу прощения, но в машинках я не разбираюсь), практически все остальные делали из ПВХ 3мм.
Начали с изготовления вот таких вот "усиков" - это можно сказать "пальцы" нашего захвата.
Затем приклеели на цеакрин качалки для маленьких сервочек, которые будут осуществлять захват какого-то объека (в нашем случае это будет банка из под газировки объёмом 0.33)

Строительство продолжилось изготовлением несущей балки, стрелы или, как мы её назвали, "руки".

Предусмотрев место под стандартные сервоприводы, сразу примерили как они будут там установлены

Продолжаем делать захват (мы, конечно же, обозвали это просто - "хваталка").
Из кусочка ПВХ 8 мм. изготовили произвольной формы площадку для размещения "хватательных" сервочек.

Чтобы скрыть ненужные полоски и добавить яркого цвета в нашу конструкцию мы решили сделать наклейку из жёлтого аракала (самоклеющаяся плёнка) , по той же технологии изготовили качалки (тоже произвольной формы) из ПВХ 3 мм.


Наша "хваталка" готова к установку на "руку", но для этого нам нужно на балке выровнять расстояние между качалками "хваталки". Для этого мы приклеели не большую площадку

Для того чтобы наша стрела смогла бы наклоняться вверх и вниз мы изготовили вот такую станину. Подбирая габариты нам нужно было предусмотреть место для ещё одного сервопривода.

Соединили полученные конструкции и получили вот такое устройство (вот уже что-то вырисовывается =) )
Теперь, чтобы конструкция приобрела более приятный глазу вид, проложили внутри балки провода, закрыли крышечкой и начали обклеивать черной самоклейкой

В роцессе постройки мы приняли ещё одно дизайнерское решение - добавить диагональные полосы жёлтого цвета, как и в настоящей мощной промышленной технике

Соединили и получили , на мой взгляд, достаточно симпатичную конструкцию

На машинку установили из ПВХ 3мм площадку с сервоприводом посередине
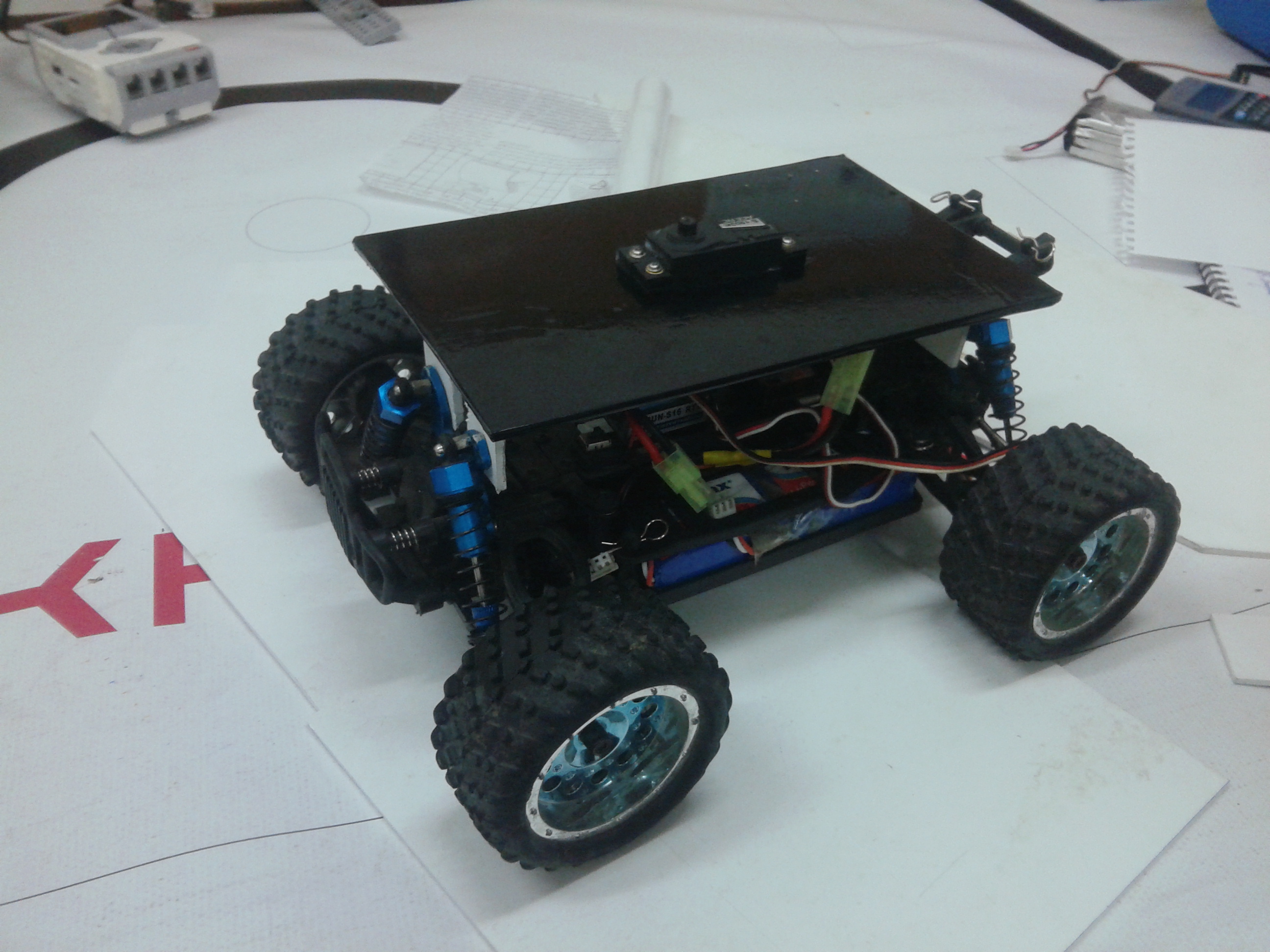
На неё установили на качалке поворотную платформу, на которой будет располагаться аккумулятор, приёмник и само подъёмо-опускаемое устройтво - наша "рука".
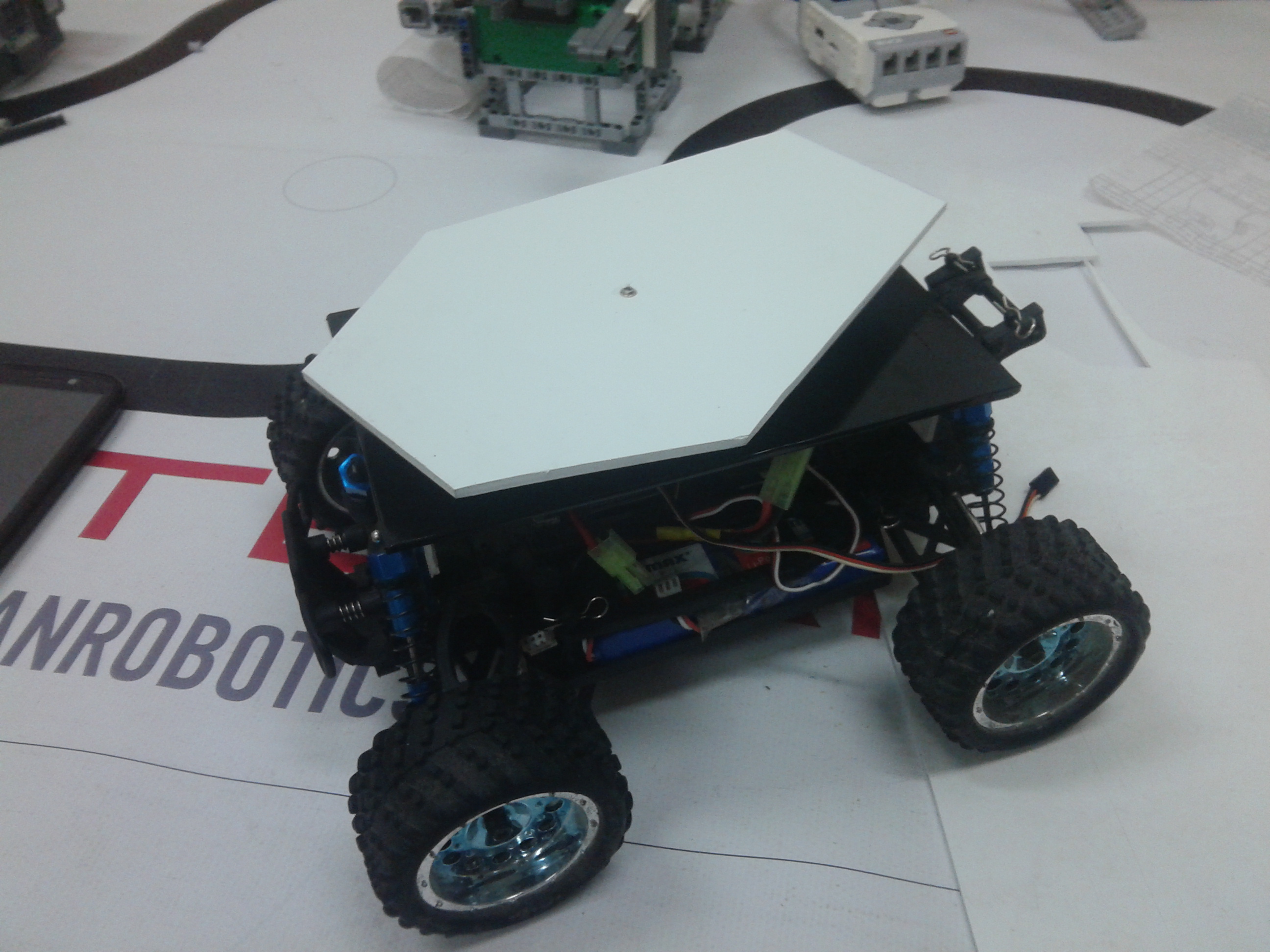
Но когда начали устанавливать оборудование, столкнулись с серьёзной пробллемкой. Из-за одной точки опоры (на оси привода) конструция во время движения шасси и поворотов могла сломаться, по этому мы решили приделать так называемую "Юбку", которая скользила бы по чёрной площадке, внося в конструкцию дополнительную надёжность.
Теперь устанавливаем всё на поворотную площадку и проверяем. Получился вот такой маленький управляемый робот.


Для упраления использовалась аппаратура Turnigy 9х.
Видеоролик выложу познее...
Так же мы планируем установить на заднюю сторону стрелы ФПВ передатчик с видеокамерой - это даст нам дополнительное преимущество в механике - т.е. дополнительный противовес, ну и само-собой дистанционное управление там, где человеку будет невозможно работать... например, в условиях загазованности или радиационо опасных местах...













Я сделал запись в дневник, для того чтобы через время посмотреть "как это было", сохранить фотографии, показать поделку единомышленикам (я не виноват в том, что эту статью так оценили).
Сервы не 3, а 5 (если смотреть и ЧИТАТЬ внимательно), и как Вы сказали: "Вуаля..."
Студен может учится и на медицинском и на филосовском и на... Видимо без технического уклона, где даже не видели оборудование первоклассника, не говоря уже о столь сложном оборудовании как в 5-м классе; а чему их там учат я, честно говоря, не знаю.
Статью я никак не позиционировал (если Вы, конечно, это заметили).
Я искрене верю, что следующие мои статьи Вы изучите с бОльшим вниманием, и не будете делать скоропостижных выводов.
Благодарю за понимание, уважаемый Вася Недовзлётов.
И вместо серв, установить поршни из шприцов и капельниц!
Или кота наказывать
Или пиво из холодильника таскать
Или запрограммировать тапочки приносить
...
...
...
=)
Она для этого слишком плоская и слишком хлипкая...