
Если вы начинающий пилот или ваши самолеты (криволеты) не летают, или хочется делать видео съемку с самолета или для FPV.
Это конструкция для Вас уважаемые друзья моделисты.
Ваш самолет будет стараться лететь ровно, паралельно земле даже с брошенными стиками рулей!
Также самолет будет пытаться сопротивляться ветру, на слабом ветерке эффект можно назвать "выключенный ветер ".
Система борется с неудачно собранным самолетом, с неправильным центром тяжести и т.д. что не дает самолету ровно лететь. Система его заставит полететь!
Некоторые моделисты могут заскучать летать с такой системой, ведь самолет летит сам. Управление можно даже доверить своим друзьям не моделистам !
MultiWii плата применяется в основном в коптерах и известна многим именно по коптерам.
Но мало кто знает что ее можно поставить на самолет и она на нем будет очень полезна!
Почему MultiWii ?
Ответ прост: дешево, доступно, качественно, удобно и хорошо изучена на форумах!
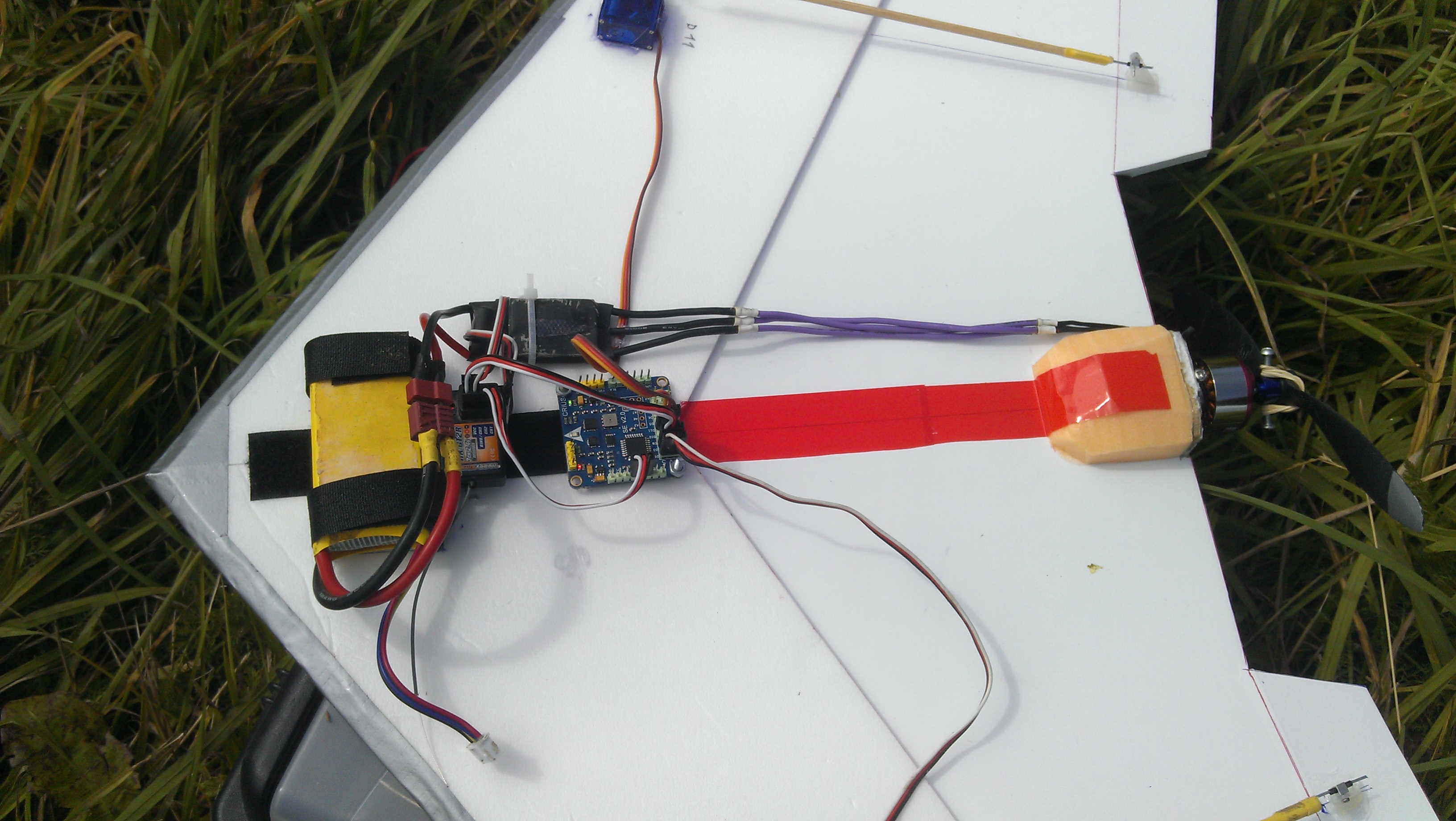
Мой вариант установки будет на летающее крыло Вжик.
Да да и на крыло тоже можно поставить!
Далее стандартные ссылки для работы MultiWii новичкам.
Сcылки:
1) http://arduino.cc/en/Main/Software
2) https://code.google.com/p/multiwii/downloads/list
Драйвера для вин7 (х86, х64), 8, 8.1... : http://www.ftdichip.com/Drivers/CDM/CDM v2.10.00 WHQL Certified.zip
Углубляться по основам работы с MultiWii не буду, статья не об этом. Да и много понятных инструкций есть уже написанных до меня. Кстати MultiWii это Arduino платформа, и работать с ней аналогично.
Плату мы будем использовать MultiWii Crius SE V2.5
Контроллер для мультикоптеров MultiWii Standard Edition V2.5
Приемник подойдет для моего случая даже 3 канальный. Но с 3 каналами не получится управлять настройками стабилизации прямо в полете. Для переключения режимов стабилизации в полете (или на земле) используется канал в передатчике\приемнике.
Можно обходится без этого двумя путями:
1. настроить все дома, проверить в поле и летать не меняя режима.
2. Подключать для быстрй перестройки параметров MultiWii дома и в поле к ПК\смартфону с помощью Bluetooth модуля. Я выбрал этот вариант!
На передатчике (пульте управления) ни каких микшеров ставить для крыла не надо!
Это все делается внутри платы MultiWii автоматически.
Схема подключения для летающего крыла
 Устанавливаем плату примерно в центр тяжести модели или в центр модели. Направление платы указано стрелкой на ней, будьте внимательны.
Устанавливаем плату примерно в центр тяжести модели или в центр модели. Направление платы указано стрелкой на ней, будьте внимательны.
Настройка прошивки:
Нужно внести 3 поправки в код прошивки, которую вы скачали. Для этого в Arduino нажимаем Файл-открыть-MultiWii.ino, далее вот так открываем для редактирования конфигурационный файл config.h:

Тут нужно раскомментировать строки.
/************************** The type of multicopter ****************************/
//#define GIMBAL
//#define BI
//#define TRI
//#define QUADP
//#define QUADX
//#define Y4
//#define Y6
//#define HEX6
//#define HEX6X
//#define HEX6H // New Model
//#define OCTOX8
//#define OCTOFLATP
//#define OCTOFLATX
#define FLYING_WING для летающего крыла
//#define VTAIL4
//#define AIRPLANE для самолета
/*************************** Combined IMU Boards ********************************/
тут большой список , выбирайте вашу
у нас эта #define CRIUS_SE_v2_0 // Crius MultiWii SE 2.0 with MPU6050, HMC5883 and BMP085
Ставим сглаживаение #define GYRO_SMOOTHING {10, 10, 3}
Сохраняем код , заливаем в плату.
Дополнительная настройка и проверка в GUI программе.
Важные места и шаги я отметил на картинке.
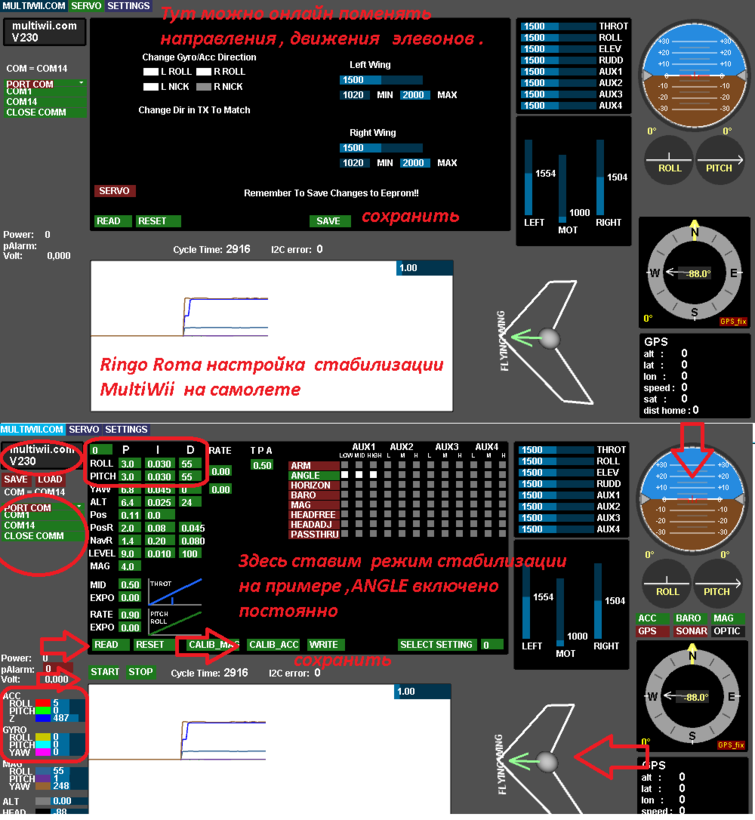
Режимы стабилизации:
ANGLE в этом режиме самолет с брошенными стиками будет лететь прямо (не всегда), но паралельно земле. В этом режиме не получится делать трюки и бочки, плата не даст самолету превысить определенный угол наклона. Вертикально свечкой улететь в небо получится.
Horizon тоже самое что ANGLE но можно летать 3D и делать трюки.
Обязательно проверяйте как работает стабилизация еще на земле!
Иначе в поле у вас самолет очень быстро камнем упадет о землю (на эти грабли наступил лично).
Если стабилизация включилась, при наклонах самолета рулевые поверхности будут двигаться!
Рулевые поверхности должны отклоняться в противоположную сторону отклонениям самолета.
Т.е. они пытаются выровнять самолет по горизонту.
Если рулевые плоскости отклоняются не правильно, измените направление их отклонения онлайн в GUI (на картинке выше показано ).
Видео пример:
Так летает мой прошлогодний вжик, еще без стаблизации. Со стороны на глаз разницы особой нет, если самолет был собран хорошо.
Но вот когда САМ летаешь, разница ощутима!
Настройка PID параметров.
После первых полетов, вы обнаружите что самолет возможно будет трясти на большой скорости например или даже на маленькой. ЧТобы это убрать, надо смягчить настройки ПИД.
Продвинутая настройка
Знакомство с воздействием P, I и D на характеристики
Р - это величина корректирующей силы, приложенной для того, чтобы вернуть мультикоптер в его начальное положение.
Величина силы пропорциональна общему отклонению от изначальной позиции минус любое командное воздействие на изменение направления с пульта управления.
Более высокое значение Р создаст более мощное усилие по сопротивлению любой попытке изменить положение мультикоптера. Если значение Р слишком велико, то при возврате в исходное положение возникает перерегулирование и, следовательно, требуется противоположная сила, чтобы компенсировать новое отклонение. Это порождает эффект раскачки до тех пор, пока наконец не будет достигнута стабильность или, в худшем случае, мультикоптер может стать полностью неуправляемым.
Увеличение значения Р:
- Приводит к большей устойчивости /стабильности до тех пор, пока слишком большое значение Р не приведет к колебаниям и потере контроля над мультикоптером.
- Вы заметите очень большую силу воздействия, противодействующую любому изменению положения мультикоптера.
Уменьшение значения Р:
- Приведет к дрейфу в управлении до тех пор, пока слишком малое значение Р не сделает мультикоптер неуправляемым.
- Коптер будет меньше сопротивляться любым попыткам изменить его положение.
Акробатические (пилотажные) полеты требуют чуть более высоких Р. а
Аккуратные и плавные полеты – чуть более низкого Р.
I – это период времени, в течение которого угловые отклонения записываются и усредняются.
Величина силы, прикладываемой для возврата в исходное положение, увеличивается на значения I настолько долго, насколько угловое отклонение сохраняется, пока не будет достигнута максимальная величина усилия. Более высокое значение I способствует улучшению курсовой устойчивости.
Увеличение значения I:
- Увеличит способность удерживать начальное положение и уменьшит дрейф, но так же увеличит задержку возврата в начальное положение.
- Также уменьшает влияние Р.
Уменьшение значения I:
- Улучшит реакцию на изменения, но увеличит дрейф и уменьшит способность удерживать положение.
- Так же увеличивает влияние Р.
Акробатический полёт: требует немного меньших значений I
Аккуратный плавный полёт: требует немного большие значения I
D – это скорость, с которой мультикоптер вернется в его начальное положение.
Увеличение значения D: (означает меньшее число, т.е. значение близкое к нулю) улучшает скорость, с которой отклонения восстанавливается.
- Увеличение значения D (помним, что это значит МЕНЬШЕЕ число, т.к. значение отрицательное) увеличивает скорость, с которой все отклонения будут скомпенсированы. Это означает так же увеличение вероятности появления перерегулирования и колебаний.
- Так же увеличивается эффект от изменения Р.
Уменьшение значения D: (это уже значит БОЛЬШОЕ число (дальше от нуля), т.к. это отрицательно значение)
- Уменьшает колебания при возврате в начальное положение.
- Возврат в начальное положение происходит медленнее.
- Так же уменьшает эффект от изменения Р.
Для акробатического полёта: увеличьте D (меньшее число, т.е. ближе к нулю)
Для аккуратного и плавного полёта: уменьшите D (большее число, т.е. дальше от нуля)
Материала много, постарался изложить основное что необходимо. Если появятся неясности, учтем в комментариях.
Статью обновлю.













Тут на сайте были такие да и в яндексе легко его найдете. В свое время стоил он копейки 4$
Это все сложно для меня, да и надобности в этом нет. Плата для коптеров создана со всеми им интересными фишками, применимо многое и в самолетном режиме.
Я сам не проверял, нет пока классического самолета.
У меня вот вообще приемник всего 3 канала, чего вполне хватает (хотя на картинке 8 канальный показан).
Между регулятором и передатчиком, под кучей проводов как раз ОНО. Плата стабилизатора вот такая http://www.rctimer.com/product_685.html Покупалась не мною, но цену сами видите, подарить не жалко, вот мне её и подарили) Для любителей покувыркаться могу сообщить, что режим прямого управления в самолётной прошивке есть. Часто его использую, когда надоедает летать блинчиком, а пищалка всё ещё молчит.