Приветствую всех! Сегодня хочу рассказать о своей очередной модернизации коптера! На этот раз я постарался и сделал еще больше красивых фоток=)
Уже почти два года как я стал коптероводом, начинал с полетного контроллера Hobbyking KK2.0, вот моя статья, про то, с чего начинал: http://www.parkflyer.ru/48853/blogs/view_entry/672/#position=read_moar
После этого решил перейти на что-то более серьёзное, приобрел автопилот HKPilot Mega V2.52, который представляет собой копию замечательного автопилота APM. Моя первая статья "На пути к совершенству" про первоначальное освоение автопилота тут: http://www.parkflyer.ru/48853/blogs/view_entry/7656/
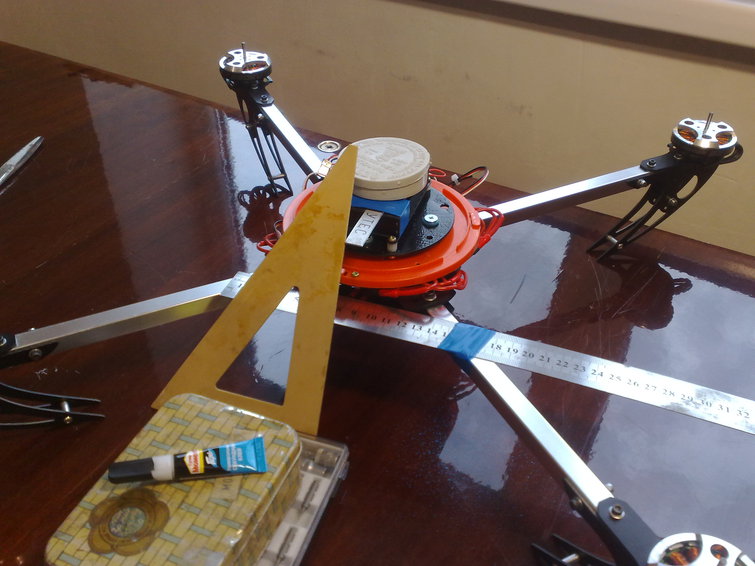
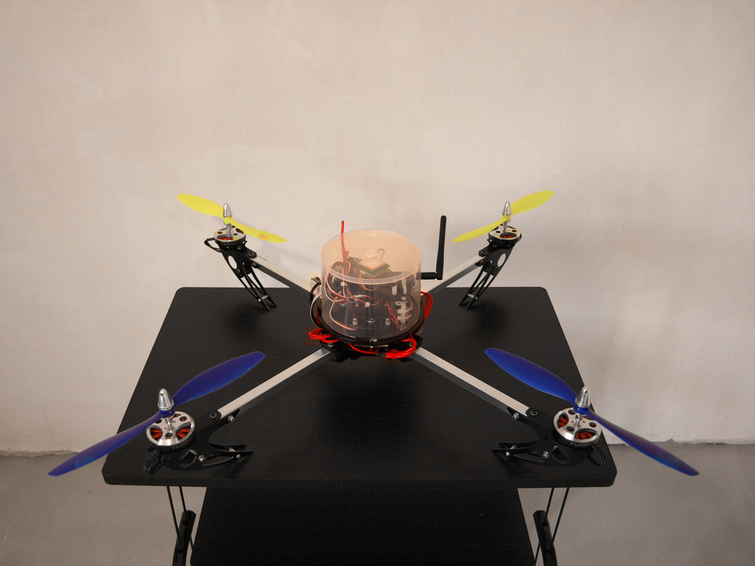
Итак, до последней модернизации мой аппарат выглядел так:
 В общем и целом все было хорошо, однако корпус из пластиковой банки изначально делался под контроллер KK 2.0, для нового автопилота с GPS-модулем он был тесен, не говоря уж о дополнительном оборудовании. Мало того, нужна была более-менее работающая виброразвязка, чтобы уменьшить отрицательное влияние высокочастотных вибраций. Ранее этот вопрос решал с помощью мягкой губки, подложенной под корпус автопилота:
В общем и целом все было хорошо, однако корпус из пластиковой банки изначально делался под контроллер KK 2.0, для нового автопилота с GPS-модулем он был тесен, не говоря уж о дополнительном оборудовании. Мало того, нужна была более-менее работающая виброразвязка, чтобы уменьшить отрицательное влияние высокочастотных вибраций. Ранее этот вопрос решал с помощью мягкой губки, подложенной под корпус автопилота:
 Однако это был временный вариант, да и смотрелось как-то не очень. Также не совсем хорошо смотрелись силовые провода, намотанные на лучи (об этом писали уважаемые моделисты в комментариях к моей прошлой статье). Провода требовалось протянуть через лучи. Также в комментариях предлагали убрать лишние разъёмные соединения, а именно соединения проводов, идущих от регуляторов, с проводами, идущими к двигателям. Это повысило бы надежность и уменьшило вес, однако демонтаж двигателя в случае поломки или обслуживания стал бы более трудоёмким. Разъемы убрать пока что не получилось, так как просто не хватало длины проводов, поэтому пока решил их оставить.
Однако это был временный вариант, да и смотрелось как-то не очень. Также не совсем хорошо смотрелись силовые провода, намотанные на лучи (об этом писали уважаемые моделисты в комментариях к моей прошлой статье). Провода требовалось протянуть через лучи. Также в комментариях предлагали убрать лишние разъёмные соединения, а именно соединения проводов, идущих от регуляторов, с проводами, идущими к двигателям. Это повысило бы надежность и уменьшило вес, однако демонтаж двигателя в случае поломки или обслуживания стал бы более трудоёмким. Разъемы убрать пока что не получилось, так как просто не хватало длины проводов, поэтому пока решил их оставить.
Итак, виброразвязку я сделал в виде площадки, установленной на демпферах. Демпферы вытащил из старого DVD-ROMа:
 Основания для демпферов также вырезал из привода:
Основания для демпферов также вырезал из привода:
 В качестве нового корпуса для электроники был выбран корпус для хранения оптических дисков, на основание которого были наклеены основания для демпферов:
В качестве нового корпуса для электроники был выбран корпус для хранения оптических дисков, на основание которого были наклеены основания для демпферов:
 Также верезал саму площадку из листового полистерола, а также платформу для крепления дополнительного оборудования из текстолита:
Также верезал саму площадку из листового полистерола, а также платформу для крепления дополнительного оборудования из текстолита:
 Кажущиеся на первый взгляд "лишние" отверстия необходимы для выравнивания давления в корпусе. Позднее все детали были окрашены черным.
Кажущиеся на первый взгляд "лишние" отверстия необходимы для выравнивания давления в корпусе. Позднее все детали были окрашены черным.
Теперь расскажу о новом оборудовании, которое я установил:
-Система телеметрии для FPV, 433MГц, комплект 100мВт, V1.1, ссылка:
Система телеметрии для FPV, 433MГц, комплект 100мВт, V1.1
-Модуль питания для APM, ссылка:
Модуль питания для APM с коннекторами XT60 и 6-контактным 150мм кабелем
Ранее питание автопилота производилось от BECа одного из регулояторов, однако напряжение величиной в 5V проходило через защитный диод и терморезистор, установленные на плате автопилота, из-за чего падало в конечном итоге примерно до 4,7 В. Этого было маловато, так как существовал риск перезагрузки процессора из-за критически низкого напряжения, а если это произойдет в воздухе, то будет очень и очень плохо. Модуль питания для APM исходя из описания выдает напряжение величиной 5,3 В, благодаря чему после прохождения цепи, состоящей из диода и терморезистора напряжение как раз будет в районе 5 В, что в общем-то является идеалом для автопилота. Кроме того, данный модуль питания также является датчиком тока, благодаря которому можно видеть параметры электропитания в полете, в режиме реального времени!
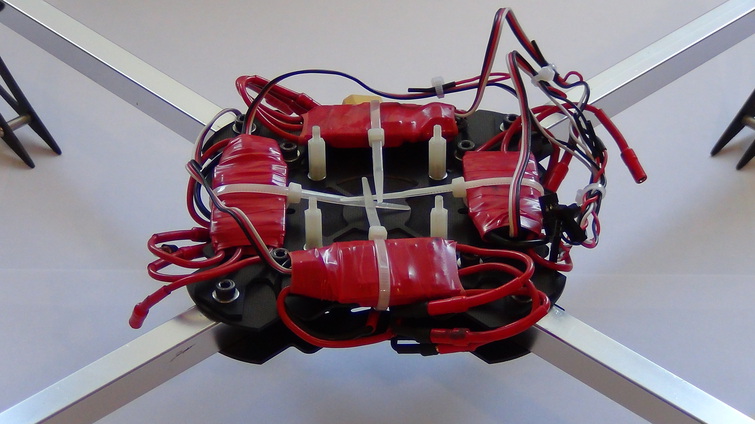
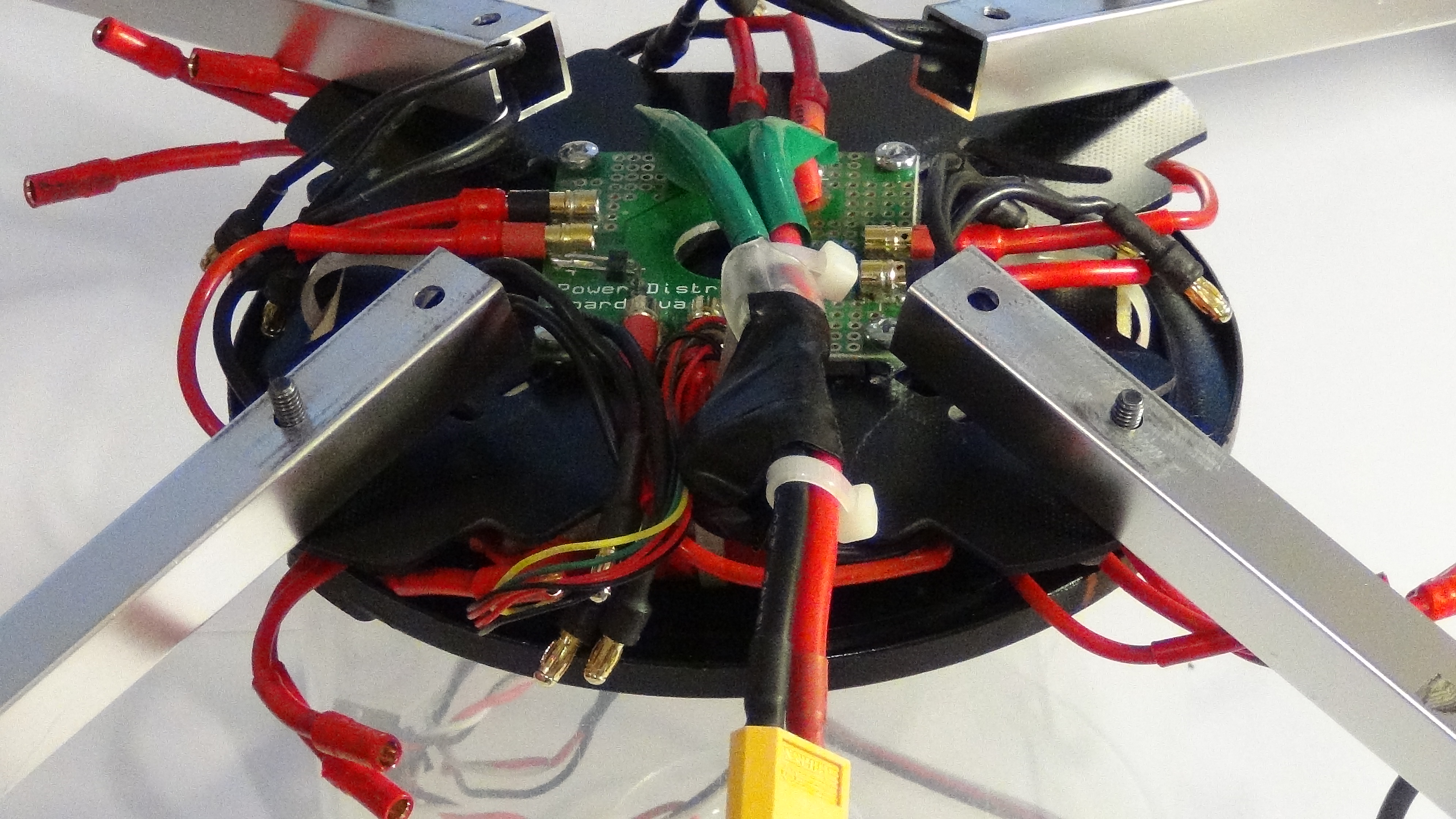
Итак, модуль питания установлен в самой раме, выходной разъем отрезан, а силовые провода были припаяны к плате разводки питания:
 Пучок тонких проводов необходим для связи с автопилотом, а именно для того, чтобы датчик тока мог передавать на автопилот все параметры электропитания.
Пучок тонких проводов необходим для связи с автопилотом, а именно для того, чтобы датчик тока мог передавать на автопилот все параметры электропитания.
Скручиваем раму, силовая часть готова:
 Регуляторы оборотов остались те же - TYRNIGY PLUSH 25A, отличные регуляторы, стоковая прошивка меня устраивает, за все время ни одного сбоя.
Регуляторы оборотов остались те же - TYRNIGY PLUSH 25A, отличные регуляторы, стоковая прошивка меня устраивает, за все время ни одного сбоя.
Силовые провода провода пропущены через лучи:
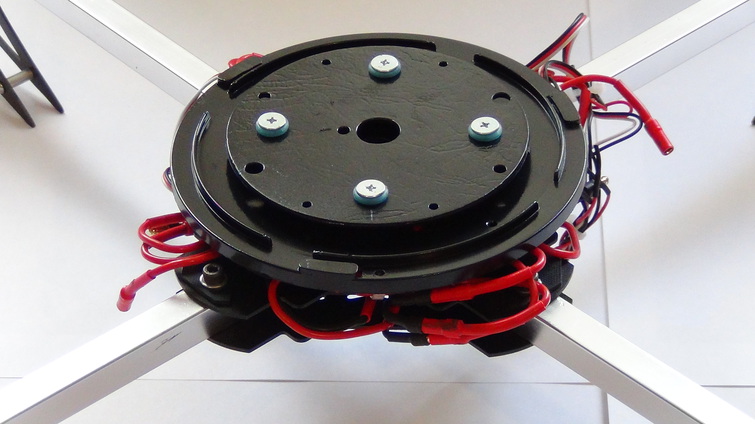
 Далее устанавливаем основание корпуса:
Далее устанавливаем основание корпуса:
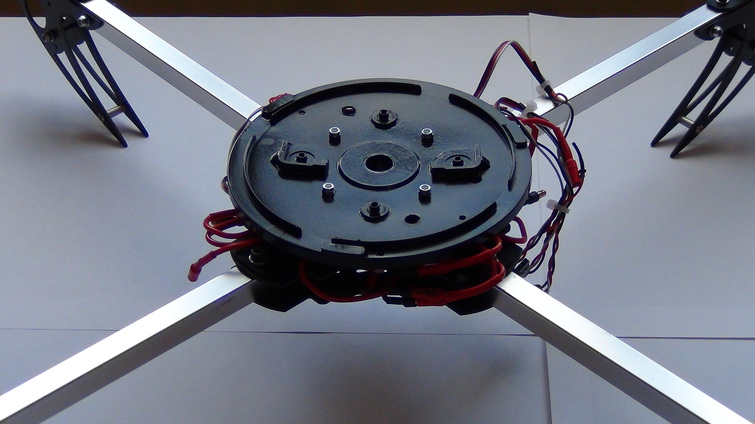 Далее монтирую демпферный узел:
Далее монтирую демпферный узел:
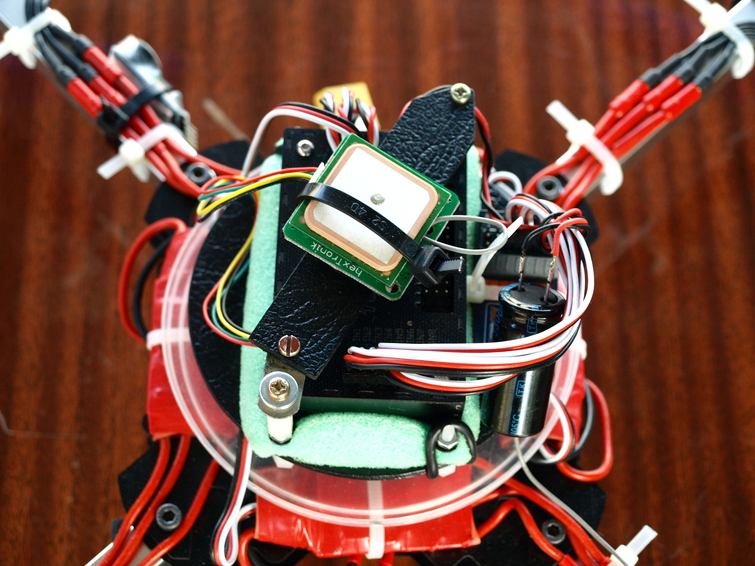
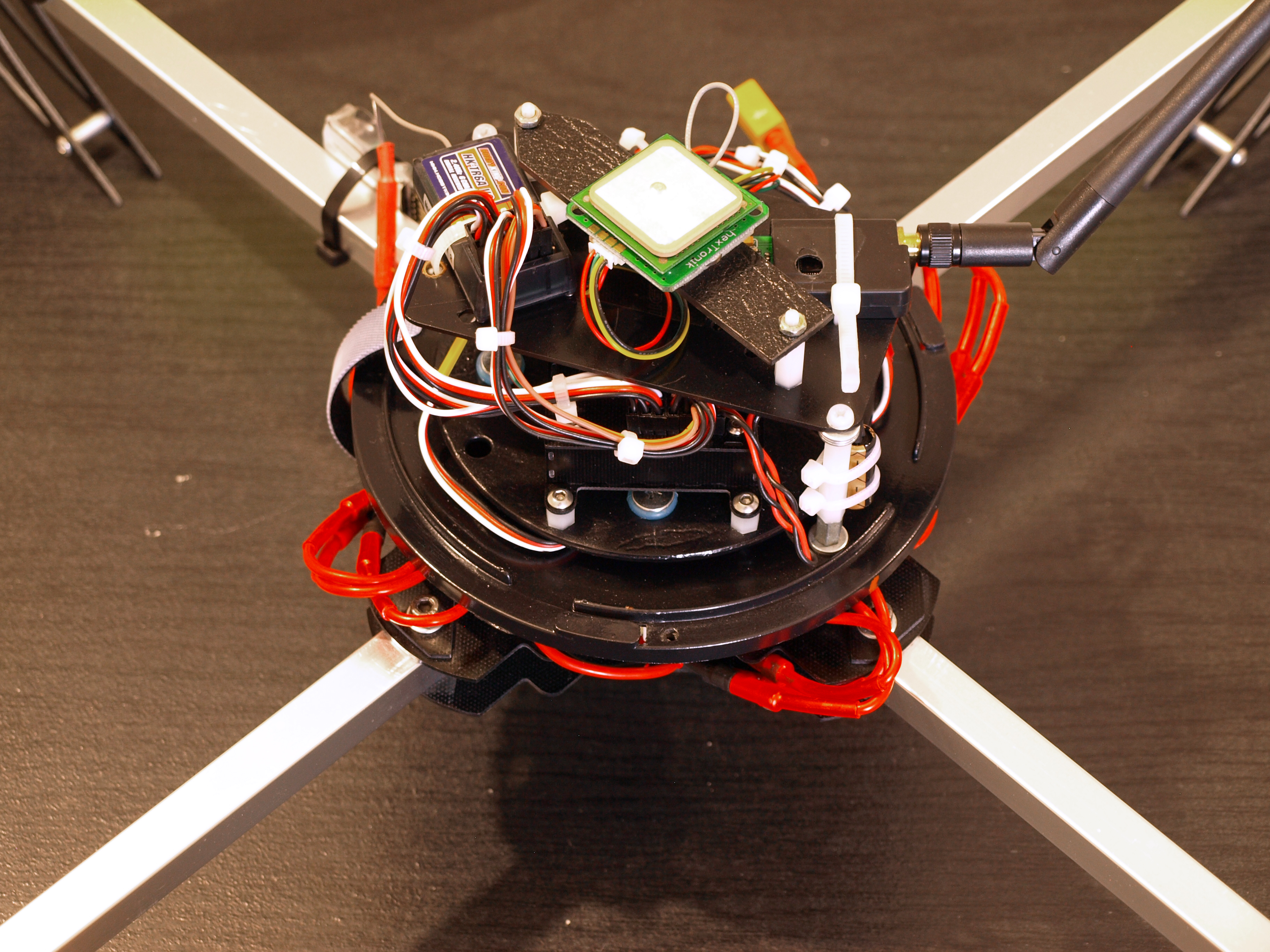
 Хочу обратить внимание на очень важный момент, необходимо выставить автопилот как можно точнее, а именно чтобы его центр находился точно между двух передних лучей коптера (фото сделано до того как детали были окрашены):
Хочу обратить внимание на очень важный момент, необходимо выставить автопилот как можно точнее, а именно чтобы его центр находился точно между двух передних лучей коптера (фото сделано до того как детали были окрашены):
 Устанавливаем автопилот в корпусе:
Устанавливаем автопилот в корпусе:
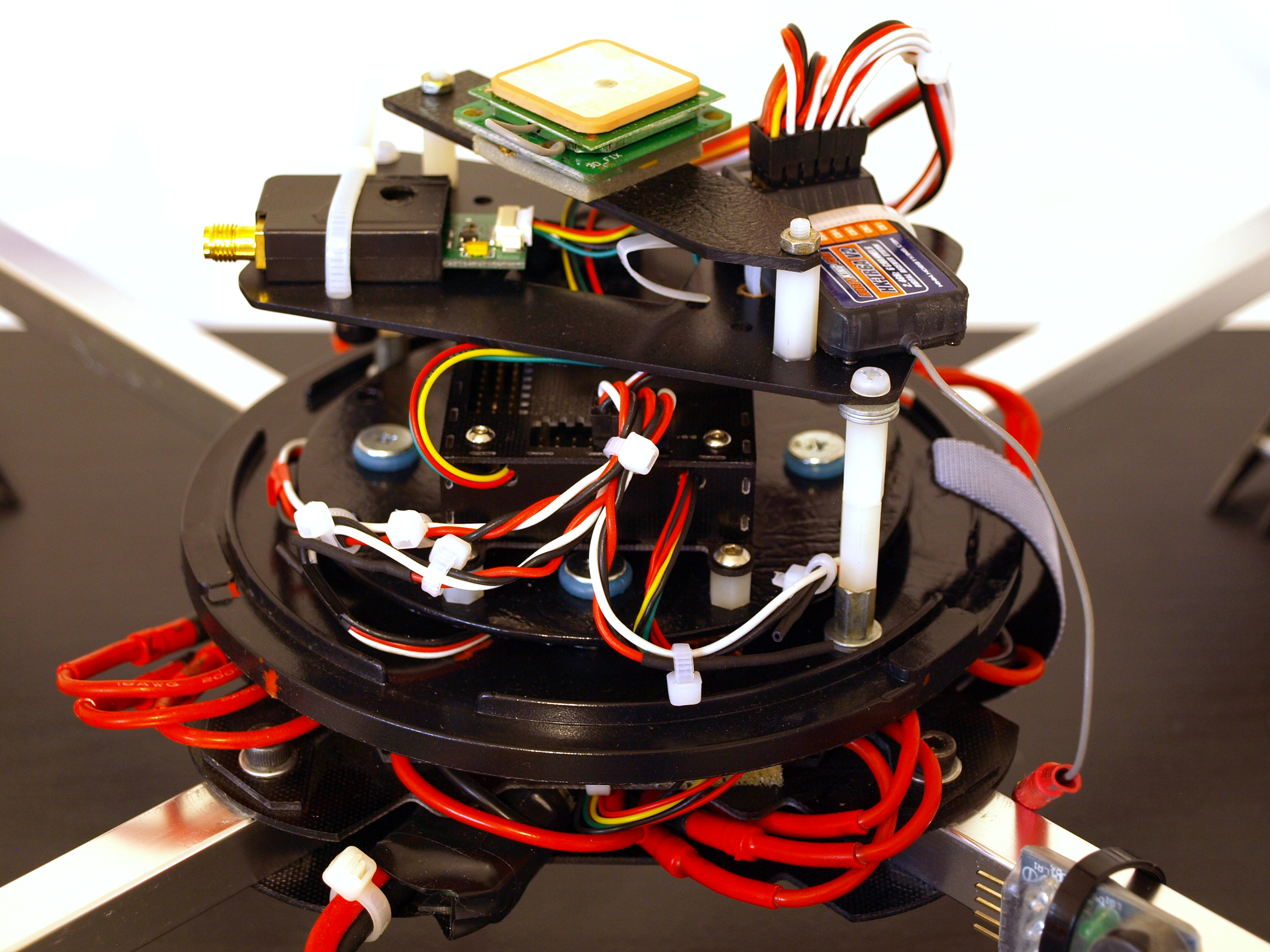
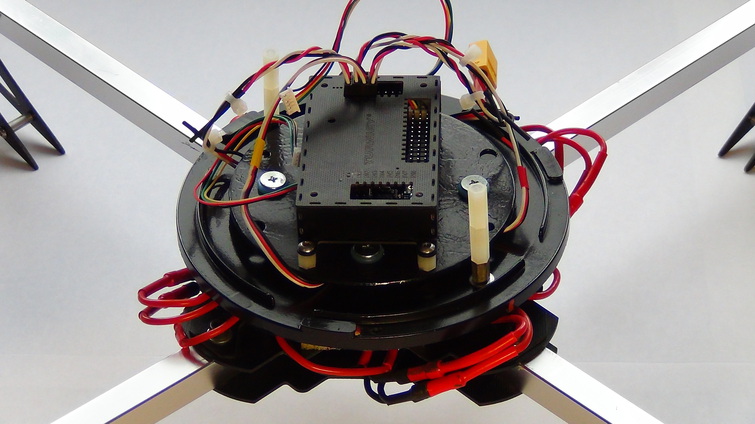 Далее устанавливаю платформу для дополнительного оборудования, вырезанную из текстолита:
Далее устанавливаю платформу для дополнительного оборудования, вырезанную из текстолита:
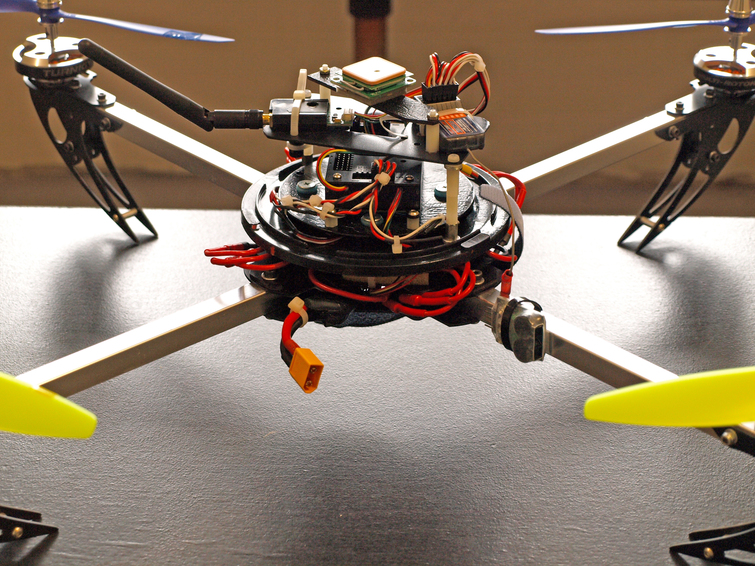 На платформе установлены:
На платформе установлены:
-Приёмник HK-TR6A V2;
-GPS-модуль NEO-6M;
-Система телеметрии;

 Выбор был сделан в пользу телеметрии, работающей на частоте 433 мГц, так как эта частота не мешает работе системы радиоуправления, работающей на частоте 2,4 гГц. Приёмник и система телеметрии установлены на максимально возможном расстоянии друг от друга.
Выбор был сделан в пользу телеметрии, работающей на частоте 433 мГц, так как эта частота не мешает работе системы радиоуправления, работающей на частоте 2,4 гГц. Приёмник и система телеметрии установлены на максимально возможном расстоянии друг от друга.
GPS-модуль работает отлично, без сбоев, устанавливает связь со спутниками даже в пасмурную погоду. Ссылка на модуль: GPS модуль NEO-6M
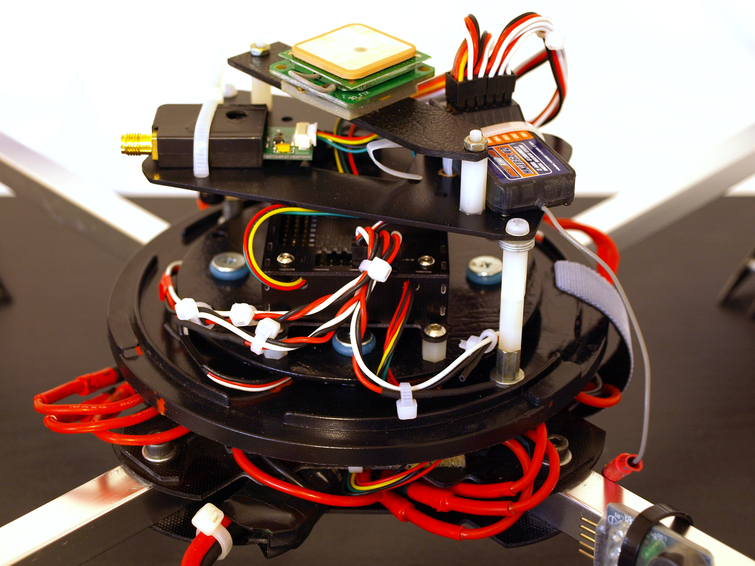
Держатель для телеметрии был сделан из крышки от футляра для лезвий от канцелярских ножей, для наземного модуля также сделал корпус из такого же футляра:
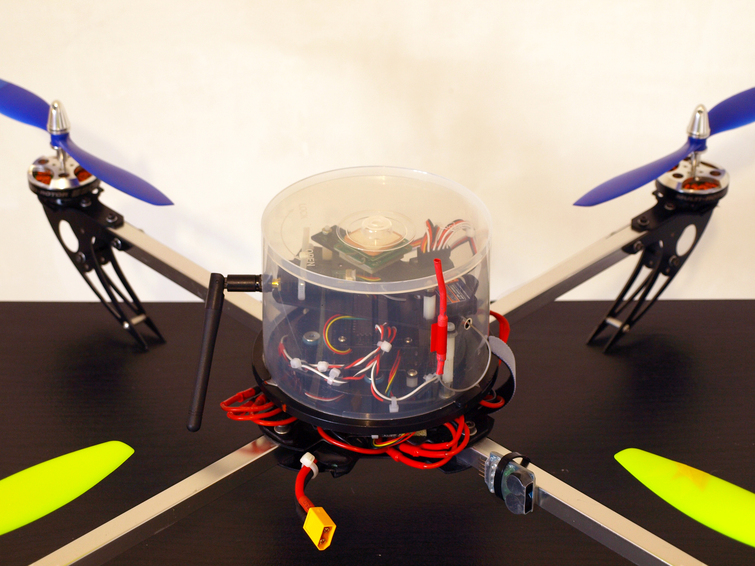
 Итак, общий вид с крышкой:
Итак, общий вид с крышкой:
 Под антенну телеметрии и антенну приемника просверлил отверстия, антенна телеметрии прикручивается после установки крышки, сама крышка для надежности фиксируется винтом 3 мм.
Под антенну телеметрии и антенну приемника просверлил отверстия, антенна телеметрии прикручивается после установки крышки, сама крышка для надежности фиксируется винтом 3 мм.
 Итак, ну теперь, собственно, чего добился:
Итак, ну теперь, собственно, чего добился:
-Питание борта: с новым модулем питание автопилота находится в районе 5,18 В, что в общем-то нормально. Ниже приведено содержимое лог-файла "черного ящика" автопилота с диаграммой бортового напряжения:


На счет высокочастотных помех по питанию - вот тут не знаю, но пока все отлично. Также установлен конденсатор емкостью 1500 мкФ параллельно питанию борта (можно увидеть на предыдущих фото).
Теперь посмотрим на диаграмму вибраций, полученную в результате полета в режиме Stabilize:
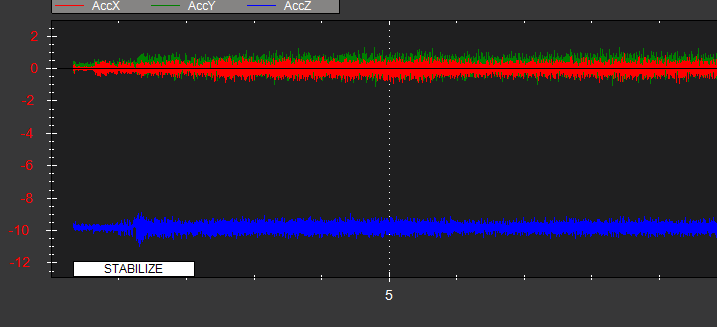
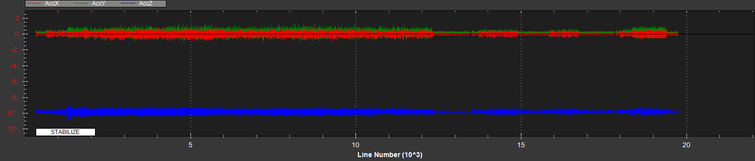
Нормальными пределами является диапазон от -3 до 3 для красного и зеленого графика, и от -5 до -15 для синего графика. Можно сказать, что это отличные результаты, лучше чем в прошлый раз, поэтому можно сделать вывод - что моя система виброразвязки работает!
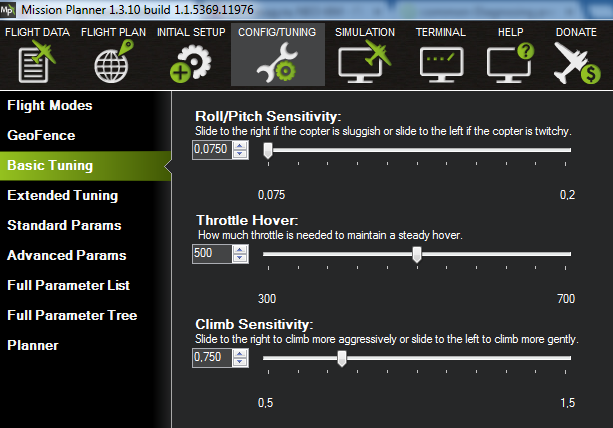
Теперь что касается PIDов. Я решил доверится умной электронике и настроил параметры PID с помощью замечательной функции Auto Tune. Ниже скрин с полученными настройками. Эти настройки автопилот подобрал именно для моей рамы и компоновки, поэтому для каждого аппарата нужно производить новую настройку!
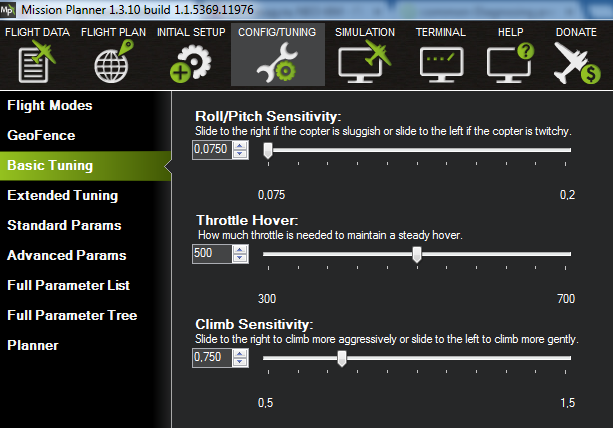
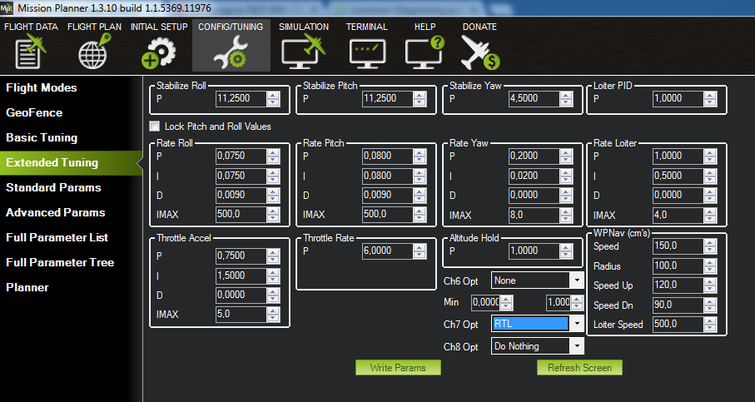
Внимание! Не нужно вводить мои значения для своего коптера, так как они могут быть слишком большими, либо малыми. Если кто-то заинтересовался, как выполняется операция автотюнинга, то можно найти видеоурок на канале Юлиана: https://www.youtube.com/channel/UCrRvbjv5hR1YrRoqIRjH3QA
Выражаю благодарность Юлиану, благодаря его каналу многое узнал про автопилот! Всем владельцам APM или HKPilot советую смотреть!
Вот и я снял свое видео, пока выполнял настройку с помощью Auto Tune:
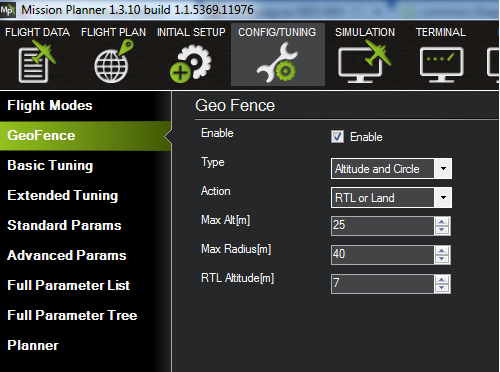
Также открыл для себя отличную функцию GeoFence, благодаря которой можно ограничить воздушное пространство, при вылете за пределы которого коптер вернется к вам!

Тестировал и новые полетные режимы:
-Drift - Режим просто отличный для полетов с FPV системой (в этом режиме управление по крену отсутствует, а горизонтальными поворотами правого стика управляем рысканьем, левым же стиком управляем только газом);
-Land - автопосадка;
-RTL - возврат к месту запуска с дальнейшей автопосадкой;
-Auto - полет по заранее созданной автомиссии.
Ниже тест режима Auto:
Тестировал и режим Loiter (удержание позиции и высоты одновременно) в жестких условиях, аппарат показал себя неплохо:
Тест режима RTL:
Пару слов про винтомоторную группу:
Двигатели TYPNIGY Multi-Rotor, 530kv, номинальной мощностью по 150 Вт каждый. Пропеллеры 10x4,5, адаптеры пропеллеров пока что заменил, так как стоковые все-таки немного бьют, поставил эти: Адаптер пропеллера из анодированного алюминиевого сплава под вал мотора 3,17мм
В режиме полета двигатели примерно работают на 40-50% от номинальной мощности, поэтому есть перспектива по увеличению грузоподъемности. Для этого необходимо увеличивать диаметр, либо шаг винтов, иными словами в будущем буду экспериментировать с пропеллерами.
Полетное время в "полной экипировке" с бортовой камерой, при использовании аккумулятора ZIPPY Flightmax 2800мАч 4S1P 30C составляет около 11 минут, без камеры немного больше. Также приобрел аккумулятор LionPower 30С 4200мАч, пока что не замерял точно, но предположительно время полета увеличится до 15-18 минут. Среднее суммарное потребление тока (электроника + силовая часть) в режиме полета около 15 А, при напряжении около 14,8 В.
Вес аппарата (без аккумулятора и бортовой камеры): 1270гр.
Текущая версия прошивки автопилота - ArduCopter V3.1.5 Quad, также перепрошивал PPM encoder, кому интересно как - смотрим на канале Юлиана, сделал все точно как он рассказывал.
Ну и еще несколько красивых фоток:





Не буду описывать все этапы настройки автопилота, так как уже есть не мало материалов на эту тему.
Отличная инструкция Юрия К., которая мне сильно помогла: http://www.parkflyer.ru/blogs/view_entry/4252/
Канал Юлиана: https://www.youtube.com/channel/UCrRvbjv5hR1YrRoqIRjH3QA
Ну и официальный сайт: http://ardupilot.com/
Еще раз отмечу, что выражаю благодарность Юрию К. и Юлиану, за их доступные, информативные и понятные материалы! Ну и конечно большое спасибо разработчикам за отличный автопилот, а также за обновляемый и доступный софт!
Не остановлюсь на достигнутом, в будущем буду работать над увеличением полетного времени, а также планирую установить систему для полетов от первого лица (FPV).
Надеюсь, что моя статья была интересной, жду адекватной критики и комментариев!
После этого решил перейти на что-то более серьёзное, приобрел автопилот HKPilot Mega V2.52, который представляет собой копию замечательного автопилота APM. Моя первая статья "На пути к совершенству" про первоначальное освоение автопилота тут: http://www.parkflyer.ru/48853/blogs/view_entry/7656/
Итак, до последней модернизации мой аппарат выглядел так:
 В общем и целом все было хорошо, однако корпус из пластиковой банки изначально делался под контроллер KK 2.0, для нового автопилота с GPS-модулем он был тесен, не говоря уж о дополнительном оборудовании. Мало того, нужна была более-менее работающая виброразвязка, чтобы уменьшить отрицательное влияние высокочастотных вибраций. Ранее этот вопрос решал с помощью мягкой губки, подложенной под корпус автопилота:
В общем и целом все было хорошо, однако корпус из пластиковой банки изначально делался под контроллер KK 2.0, для нового автопилота с GPS-модулем он был тесен, не говоря уж о дополнительном оборудовании. Мало того, нужна была более-менее работающая виброразвязка, чтобы уменьшить отрицательное влияние высокочастотных вибраций. Ранее этот вопрос решал с помощью мягкой губки, подложенной под корпус автопилота: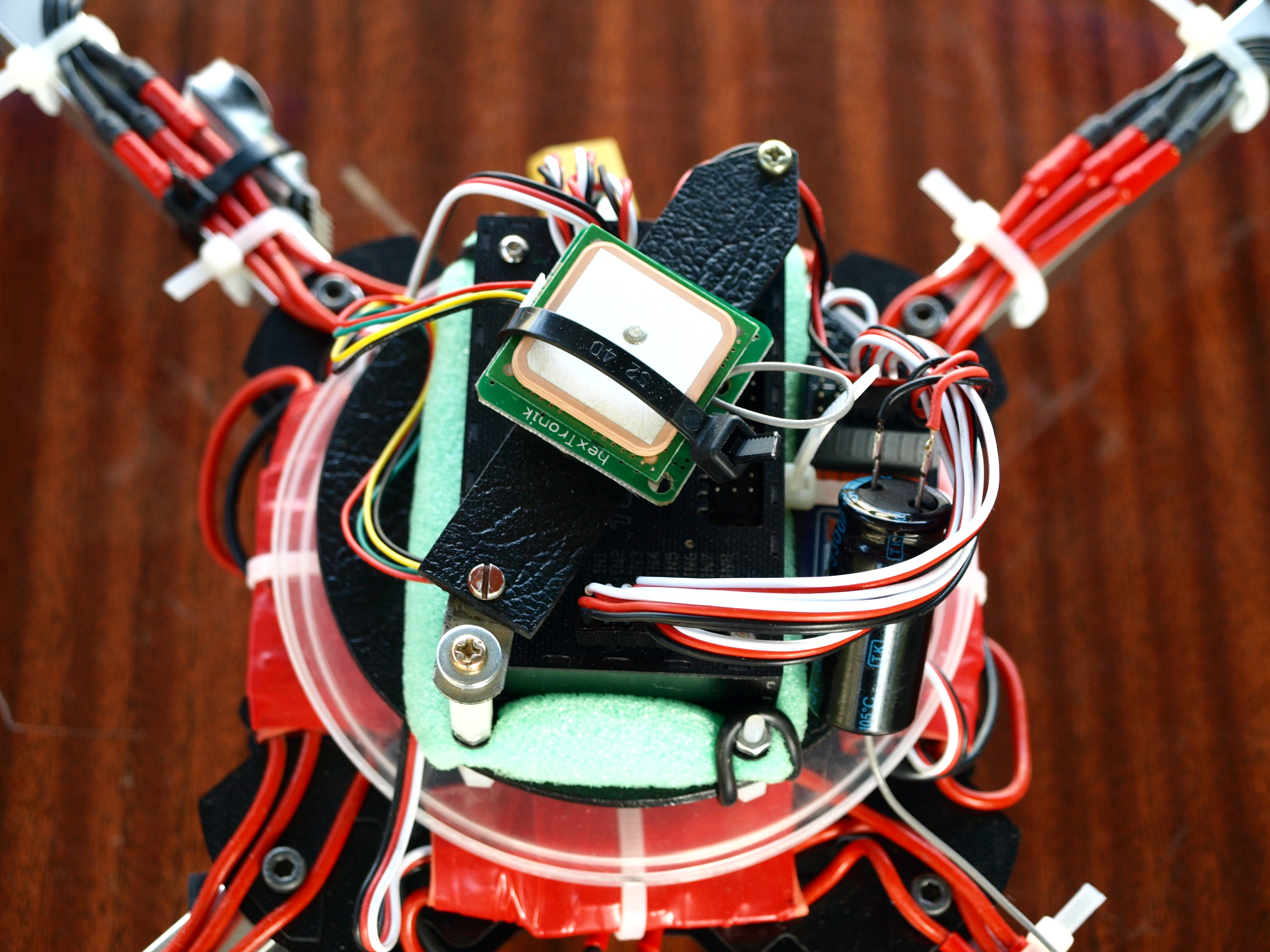 Однако это был временный вариант, да и смотрелось как-то не очень. Также не совсем хорошо смотрелись силовые провода, намотанные на лучи (об этом писали уважаемые моделисты в комментариях к моей прошлой статье). Провода требовалось протянуть через лучи. Также в комментариях предлагали убрать лишние разъёмные соединения, а именно соединения проводов, идущих от регуляторов, с проводами, идущими к двигателям. Это повысило бы надежность и уменьшило вес, однако демонтаж двигателя в случае поломки или обслуживания стал бы более трудоёмким. Разъемы убрать пока что не получилось, так как просто не хватало длины проводов, поэтому пока решил их оставить.
Однако это был временный вариант, да и смотрелось как-то не очень. Также не совсем хорошо смотрелись силовые провода, намотанные на лучи (об этом писали уважаемые моделисты в комментариях к моей прошлой статье). Провода требовалось протянуть через лучи. Также в комментариях предлагали убрать лишние разъёмные соединения, а именно соединения проводов, идущих от регуляторов, с проводами, идущими к двигателям. Это повысило бы надежность и уменьшило вес, однако демонтаж двигателя в случае поломки или обслуживания стал бы более трудоёмким. Разъемы убрать пока что не получилось, так как просто не хватало длины проводов, поэтому пока решил их оставить. Итак, виброразвязку я сделал в виде площадки, установленной на демпферах. Демпферы вытащил из старого DVD-ROMа:
 Основания для демпферов также вырезал из привода:
Основания для демпферов также вырезал из привода: В качестве нового корпуса для электроники был выбран корпус для хранения оптических дисков, на основание которого были наклеены основания для демпферов:
В качестве нового корпуса для электроники был выбран корпус для хранения оптических дисков, на основание которого были наклеены основания для демпферов: Также верезал саму площадку из листового полистерола, а также платформу для крепления дополнительного оборудования из текстолита:
Также верезал саму площадку из листового полистерола, а также платформу для крепления дополнительного оборудования из текстолита: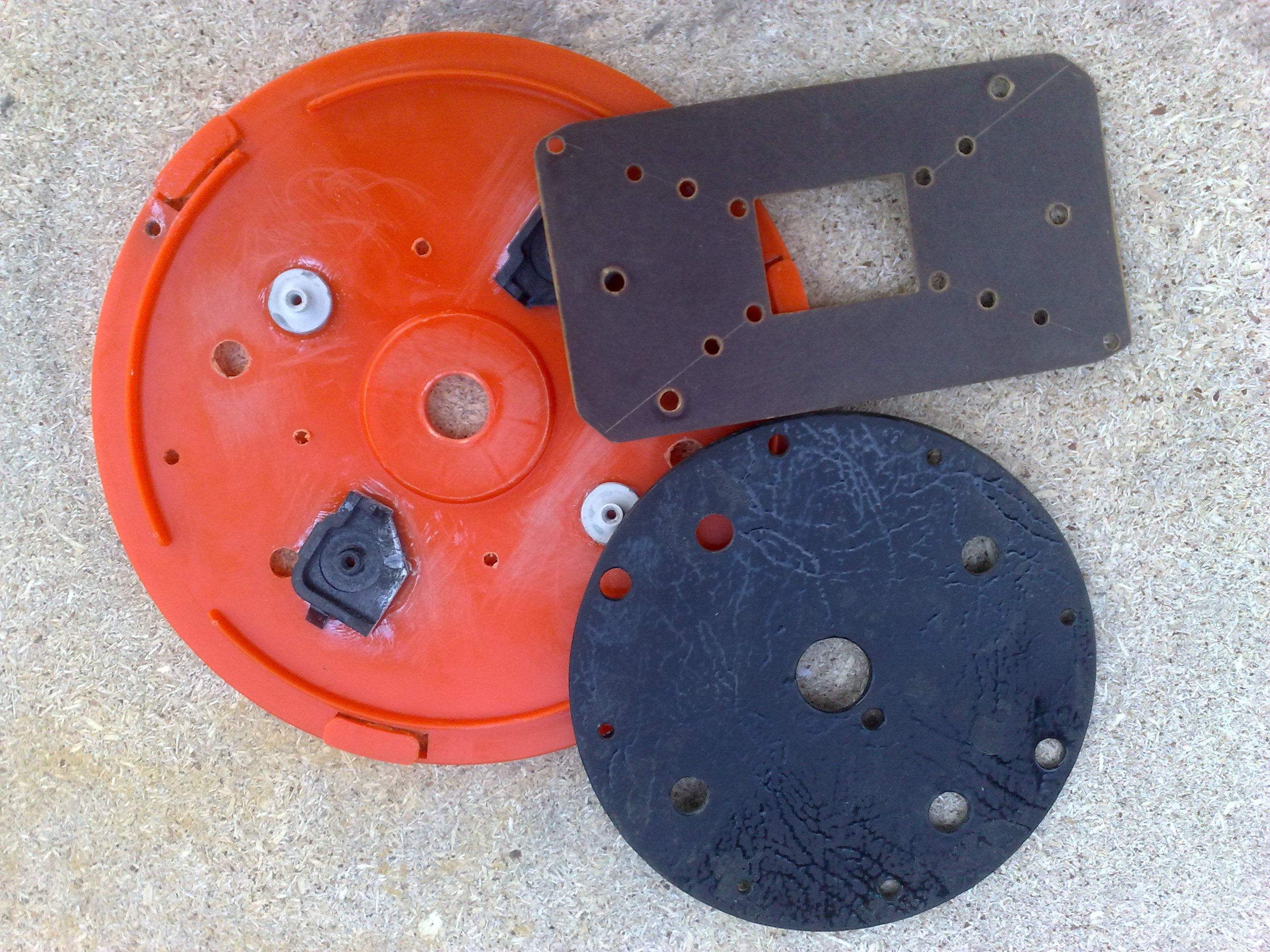 Кажущиеся на первый взгляд "лишние" отверстия необходимы для выравнивания давления в корпусе. Позднее все детали были окрашены черным.
Кажущиеся на первый взгляд "лишние" отверстия необходимы для выравнивания давления в корпусе. Позднее все детали были окрашены черным.Теперь расскажу о новом оборудовании, которое я установил:
-Система телеметрии для FPV, 433MГц, комплект 100мВт, V1.1, ссылка:
Система телеметрии для FPV, 433MГц, комплект 100мВт, V1.1
-Модуль питания для APM, ссылка:
Модуль питания для APM с коннекторами XT60 и 6-контактным 150мм кабелем
Ранее питание автопилота производилось от BECа одного из регулояторов, однако напряжение величиной в 5V проходило через защитный диод и терморезистор, установленные на плате автопилота, из-за чего падало в конечном итоге примерно до 4,7 В. Этого было маловато, так как существовал риск перезагрузки процессора из-за критически низкого напряжения, а если это произойдет в воздухе, то будет очень и очень плохо. Модуль питания для APM исходя из описания выдает напряжение величиной 5,3 В, благодаря чему после прохождения цепи, состоящей из диода и терморезистора напряжение как раз будет в районе 5 В, что в общем-то является идеалом для автопилота. Кроме того, данный модуль питания также является датчиком тока, благодаря которому можно видеть параметры электропитания в полете, в режиме реального времени!
Итак, модуль питания установлен в самой раме, выходной разъем отрезан, а силовые провода были припаяны к плате разводки питания:
 Пучок тонких проводов необходим для связи с автопилотом, а именно для того, чтобы датчик тока мог передавать на автопилот все параметры электропитания.
Пучок тонких проводов необходим для связи с автопилотом, а именно для того, чтобы датчик тока мог передавать на автопилот все параметры электропитания.Скручиваем раму, силовая часть готова:
 Регуляторы оборотов остались те же - TYRNIGY PLUSH 25A, отличные регуляторы, стоковая прошивка меня устраивает, за все время ни одного сбоя.
Регуляторы оборотов остались те же - TYRNIGY PLUSH 25A, отличные регуляторы, стоковая прошивка меня устраивает, за все время ни одного сбоя.Силовые провода провода пропущены через лучи:
 Далее устанавливаем основание корпуса:
Далее устанавливаем основание корпуса: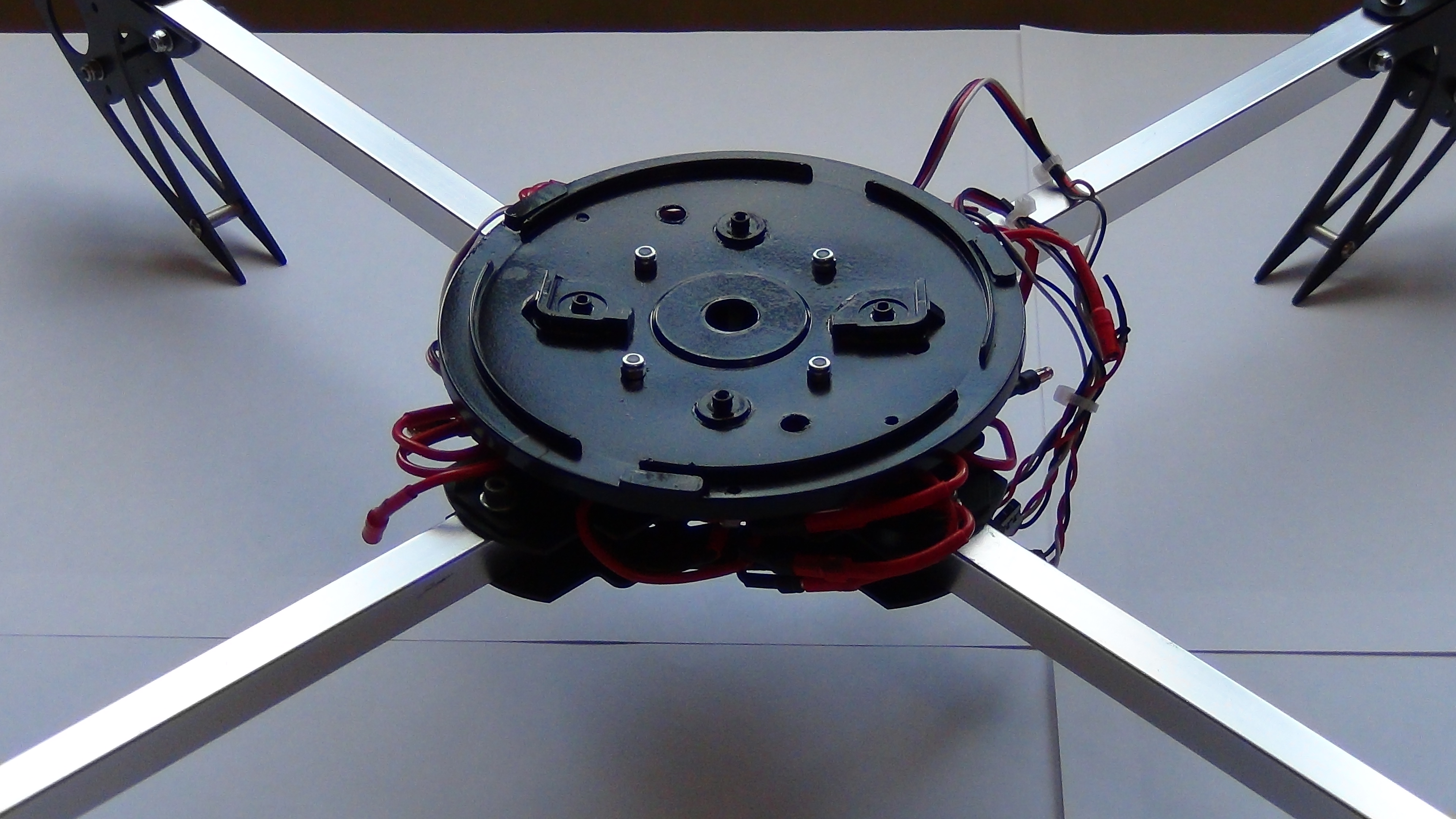 Далее монтирую демпферный узел:
Далее монтирую демпферный узел: Хочу обратить внимание на очень важный момент, необходимо выставить автопилот как можно точнее, а именно чтобы его центр находился точно между двух передних лучей коптера (фото сделано до того как детали были окрашены):
Хочу обратить внимание на очень важный момент, необходимо выставить автопилот как можно точнее, а именно чтобы его центр находился точно между двух передних лучей коптера (фото сделано до того как детали были окрашены):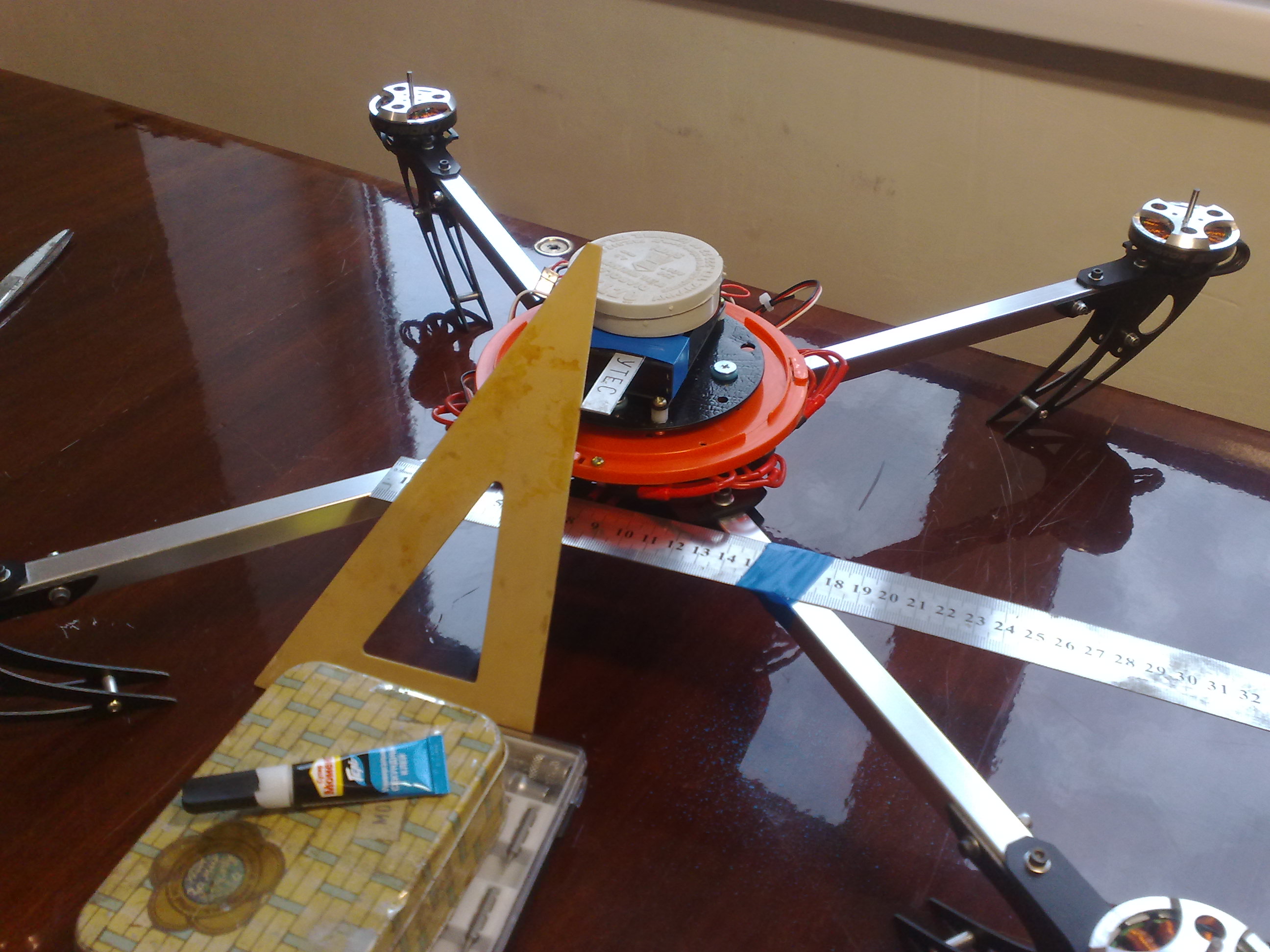 Устанавливаем автопилот в корпусе:
Устанавливаем автопилот в корпусе: Далее устанавливаю платформу для дополнительного оборудования, вырезанную из текстолита:
Далее устанавливаю платформу для дополнительного оборудования, вырезанную из текстолита: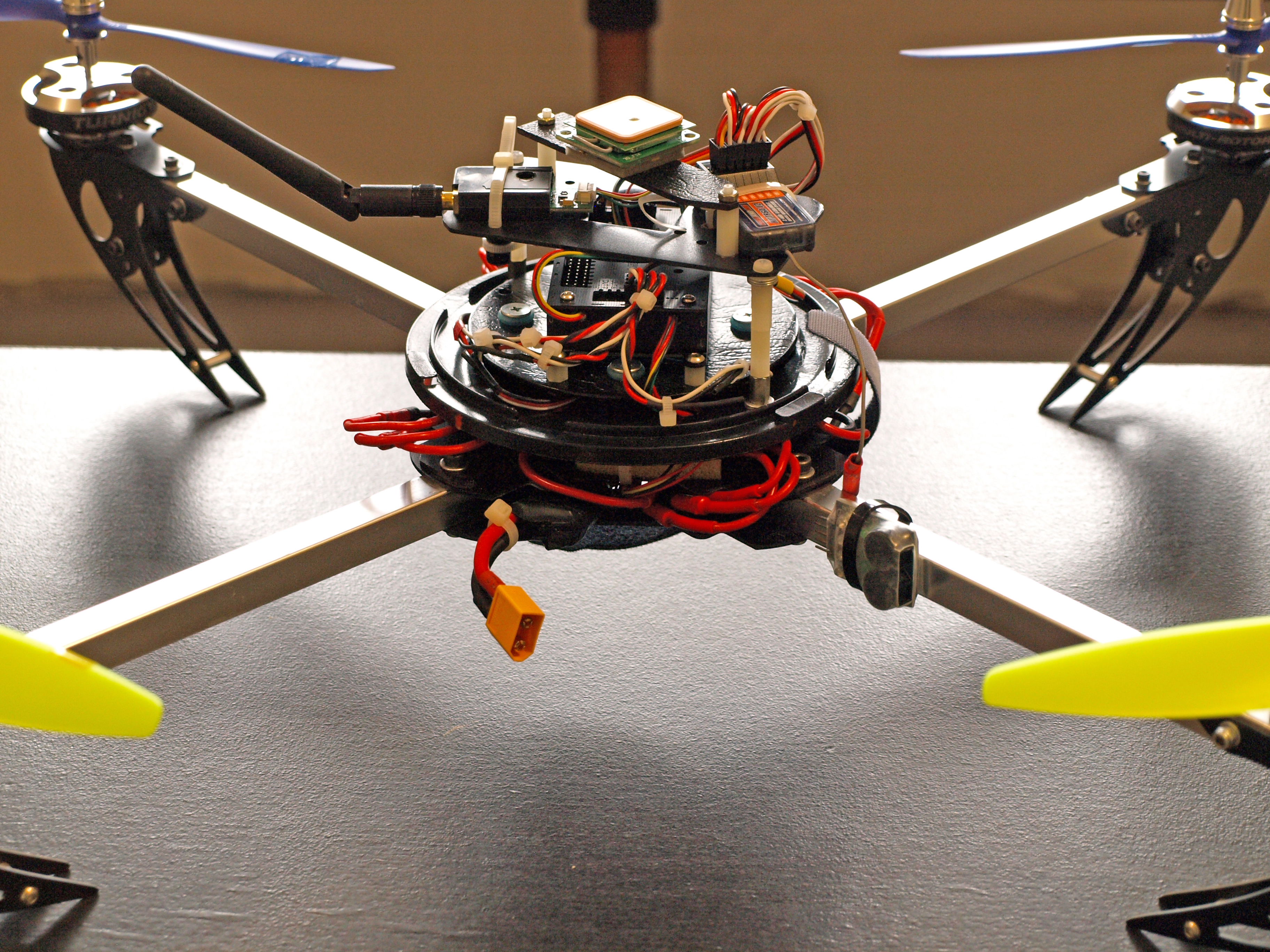 На платформе установлены:
На платформе установлены:-Приёмник HK-TR6A V2;
-GPS-модуль NEO-6M;
-Система телеметрии;
 Выбор был сделан в пользу телеметрии, работающей на частоте 433 мГц, так как эта частота не мешает работе системы радиоуправления, работающей на частоте 2,4 гГц. Приёмник и система телеметрии установлены на максимально возможном расстоянии друг от друга.
Выбор был сделан в пользу телеметрии, работающей на частоте 433 мГц, так как эта частота не мешает работе системы радиоуправления, работающей на частоте 2,4 гГц. Приёмник и система телеметрии установлены на максимально возможном расстоянии друг от друга.GPS-модуль работает отлично, без сбоев, устанавливает связь со спутниками даже в пасмурную погоду. Ссылка на модуль: GPS модуль NEO-6M
Держатель для телеметрии был сделан из крышки от футляра для лезвий от канцелярских ножей, для наземного модуля также сделал корпус из такого же футляра:
 Итак, общий вид с крышкой:
Итак, общий вид с крышкой: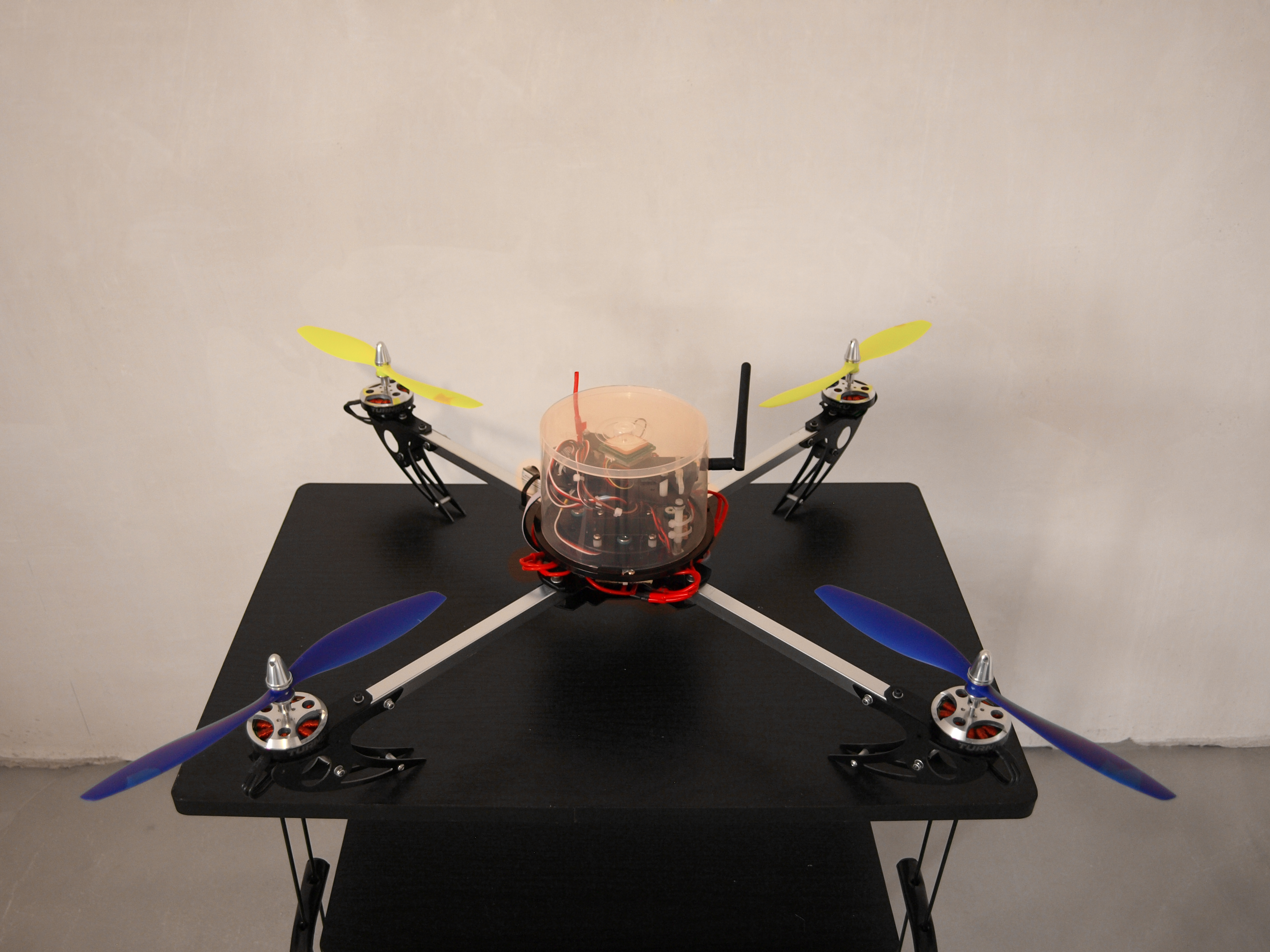 Под антенну телеметрии и антенну приемника просверлил отверстия, антенна телеметрии прикручивается после установки крышки, сама крышка для надежности фиксируется винтом 3 мм.
Под антенну телеметрии и антенну приемника просверлил отверстия, антенна телеметрии прикручивается после установки крышки, сама крышка для надежности фиксируется винтом 3 мм.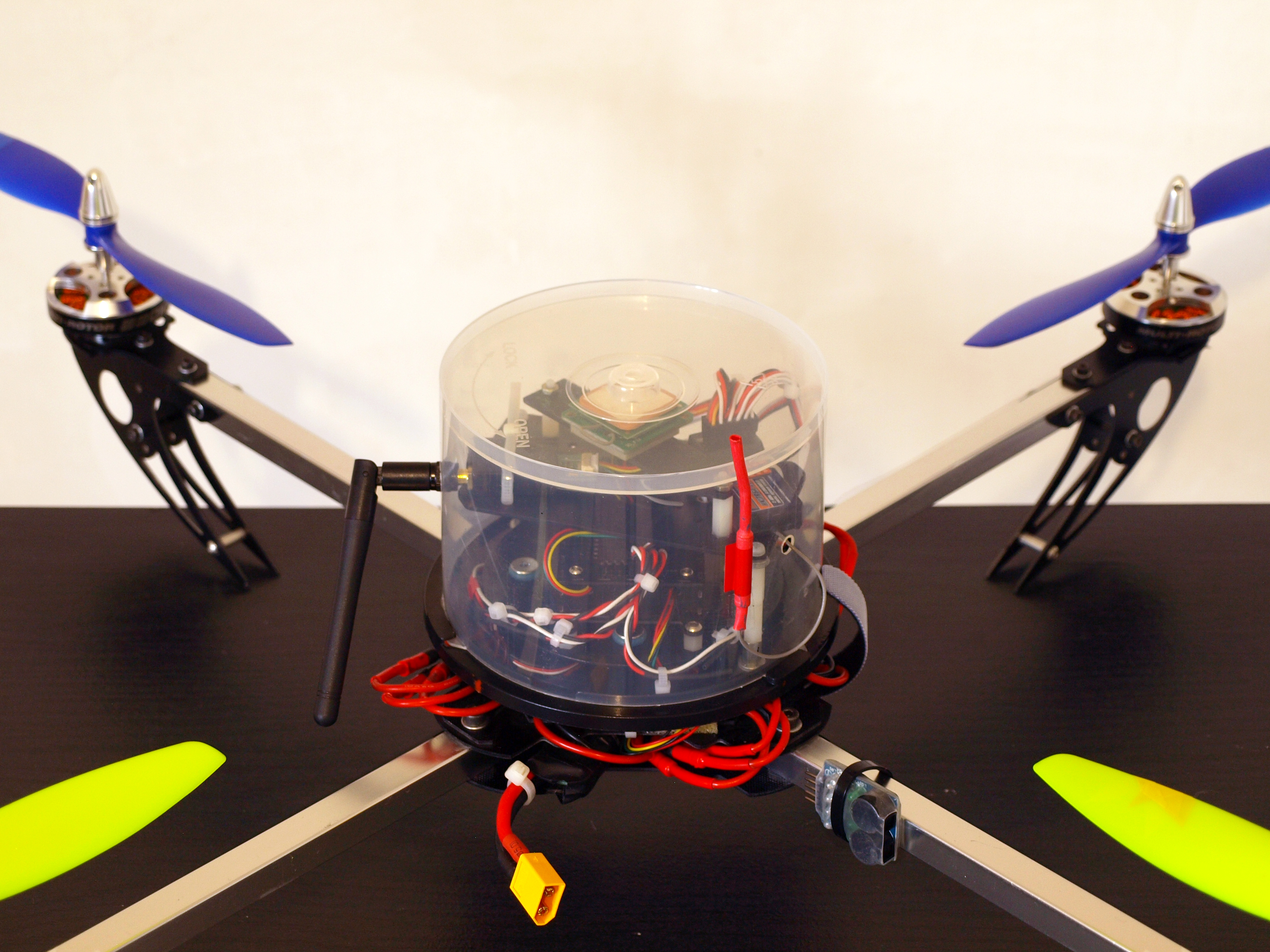 Итак, ну теперь, собственно, чего добился:
Итак, ну теперь, собственно, чего добился:-Питание борта: с новым модулем питание автопилота находится в районе 5,18 В, что в общем-то нормально. Ниже приведено содержимое лог-файла "черного ящика" автопилота с диаграммой бортового напряжения:

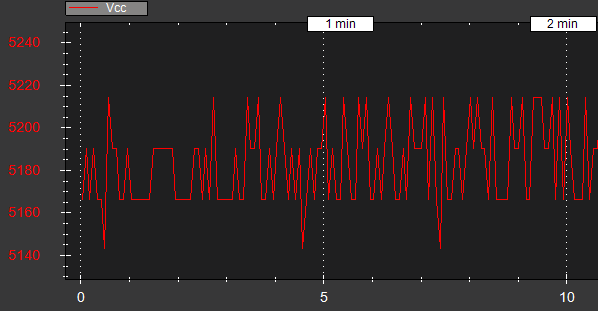
На счет высокочастотных помех по питанию - вот тут не знаю, но пока все отлично. Также установлен конденсатор емкостью 1500 мкФ параллельно питанию борта (можно увидеть на предыдущих фото).
Теперь посмотрим на диаграмму вибраций, полученную в результате полета в режиме Stabilize:
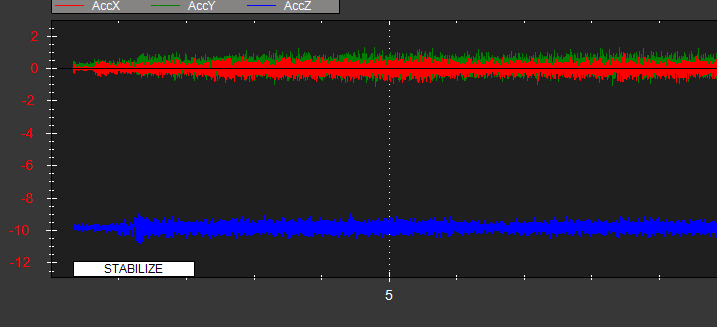
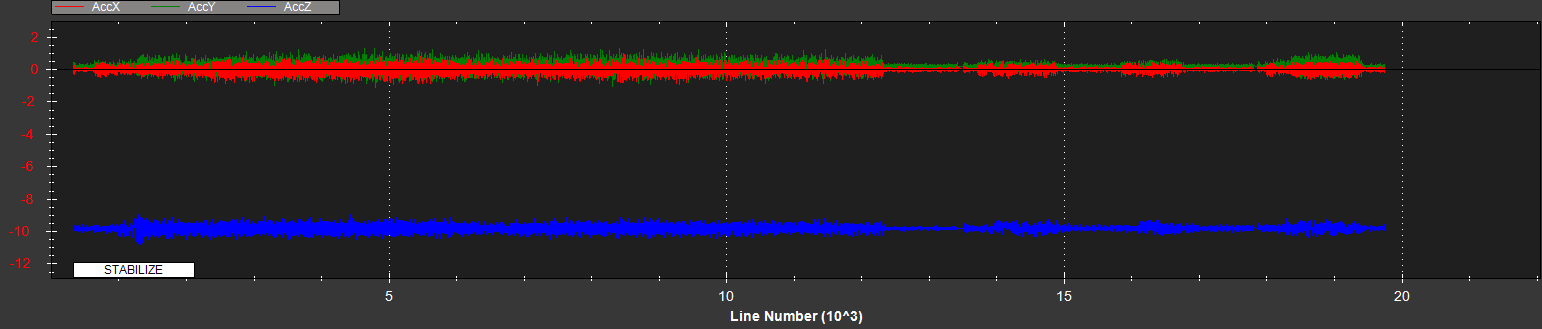
Нормальными пределами является диапазон от -3 до 3 для красного и зеленого графика, и от -5 до -15 для синего графика. Можно сказать, что это отличные результаты, лучше чем в прошлый раз, поэтому можно сделать вывод - что моя система виброразвязки работает!
Теперь что касается PIDов. Я решил доверится умной электронике и настроил параметры PID с помощью замечательной функции Auto Tune. Ниже скрин с полученными настройками. Эти настройки автопилот подобрал именно для моей рамы и компоновки, поэтому для каждого аппарата нужно производить новую настройку!
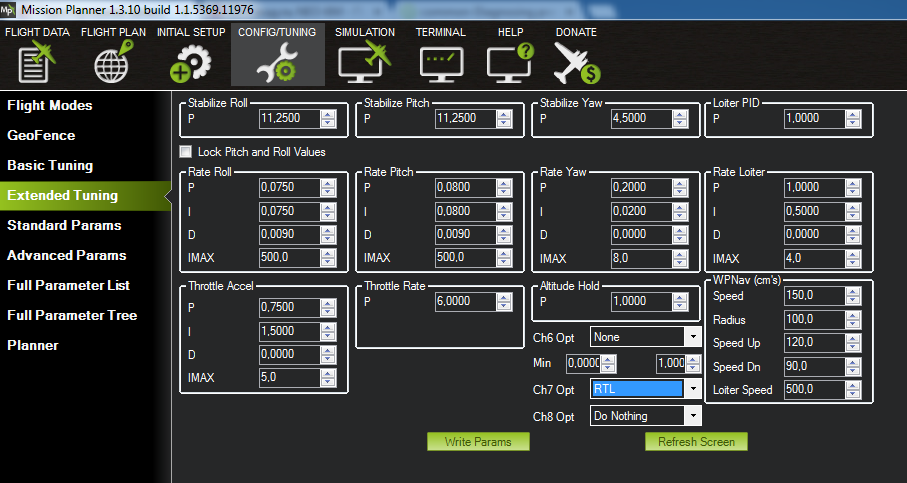
Внимание! Не нужно вводить мои значения для своего коптера, так как они могут быть слишком большими, либо малыми. Если кто-то заинтересовался, как выполняется операция автотюнинга, то можно найти видеоурок на канале Юлиана: https://www.youtube.com/channel/UCrRvbjv5hR1YrRoqIRjH3QA
Выражаю благодарность Юлиану, благодаря его каналу многое узнал про автопилот! Всем владельцам APM или HKPilot советую смотреть!
Вот и я снял свое видео, пока выполнял настройку с помощью Auto Tune:
Также открыл для себя отличную функцию GeoFence, благодаря которой можно ограничить воздушное пространство, при вылете за пределы которого коптер вернется к вам!
Тестировал и новые полетные режимы:
-Drift - Режим просто отличный для полетов с FPV системой (в этом режиме управление по крену отсутствует, а горизонтальными поворотами правого стика управляем рысканьем, левым же стиком управляем только газом);
-Land - автопосадка;
-RTL - возврат к месту запуска с дальнейшей автопосадкой;
-Auto - полет по заранее созданной автомиссии.
Ниже тест режима Auto:
Тестировал и режим Loiter (удержание позиции и высоты одновременно) в жестких условиях, аппарат показал себя неплохо:
Тест режима RTL:
Пару слов про винтомоторную группу:
Двигатели TYPNIGY Multi-Rotor, 530kv, номинальной мощностью по 150 Вт каждый. Пропеллеры 10x4,5, адаптеры пропеллеров пока что заменил, так как стоковые все-таки немного бьют, поставил эти: Адаптер пропеллера из анодированного алюминиевого сплава под вал мотора 3,17мм
В режиме полета двигатели примерно работают на 40-50% от номинальной мощности, поэтому есть перспектива по увеличению грузоподъемности. Для этого необходимо увеличивать диаметр, либо шаг винтов, иными словами в будущем буду экспериментировать с пропеллерами.
Полетное время в "полной экипировке" с бортовой камерой, при использовании аккумулятора ZIPPY Flightmax 2800мАч 4S1P 30C составляет около 11 минут, без камеры немного больше. Также приобрел аккумулятор LionPower 30С 4200мАч, пока что не замерял точно, но предположительно время полета увеличится до 15-18 минут. Среднее суммарное потребление тока (электроника + силовая часть) в режиме полета около 15 А, при напряжении около 14,8 В.
Вес аппарата (без аккумулятора и бортовой камеры): 1270гр.
Текущая версия прошивки автопилота - ArduCopter V3.1.5 Quad, также перепрошивал PPM encoder, кому интересно как - смотрим на канале Юлиана, сделал все точно как он рассказывал.
Ну и еще несколько красивых фоток:


Не буду описывать все этапы настройки автопилота, так как уже есть не мало материалов на эту тему.
Отличная инструкция Юрия К., которая мне сильно помогла: http://www.parkflyer.ru/blogs/view_entry/4252/
Канал Юлиана: https://www.youtube.com/channel/UCrRvbjv5hR1YrRoqIRjH3QA
Ну и официальный сайт: http://ardupilot.com/
Еще раз отмечу, что выражаю благодарность Юрию К. и Юлиану, за их доступные, информативные и понятные материалы! Ну и конечно большое спасибо разработчикам за отличный автопилот, а также за обновляемый и доступный софт!
Не остановлюсь на достигнутом, в будущем буду работать над увеличением полетного времени, а также планирую установить систему для полетов от первого лица (FPV).
Надеюсь, что моя статья была интересной, жду адекватной критики и комментариев!













А так да, и ветки рубил, и с зазубринами летал, но всё же старался менять на не коцанные винты. Менять на карбон или нет, решает каждый сам, но я свой выбор делал в пользу карбона.
Да, повер модуль без нагрузки выдает подобные значения. Но когда анализировал логи полетов, то у меня наблюдались просадки аж до 4.7В. Кстати с Pixhawk-ом таких проблем не наблюдается, его питаю от повер модуля.