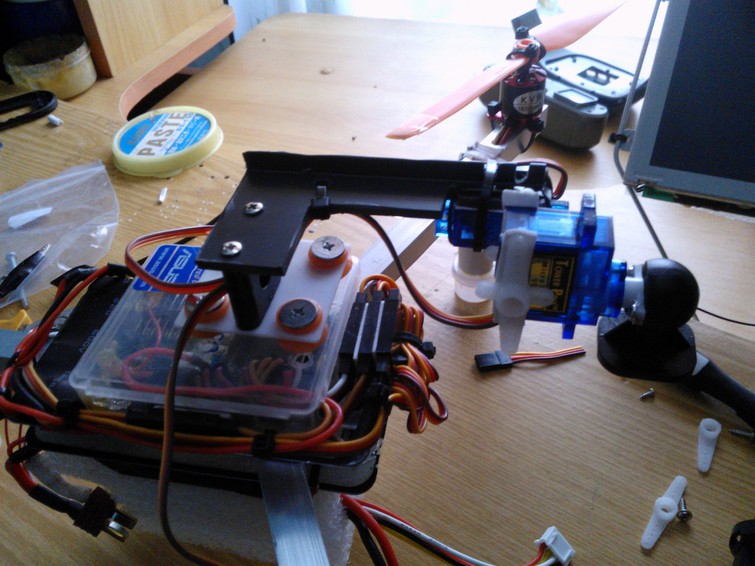
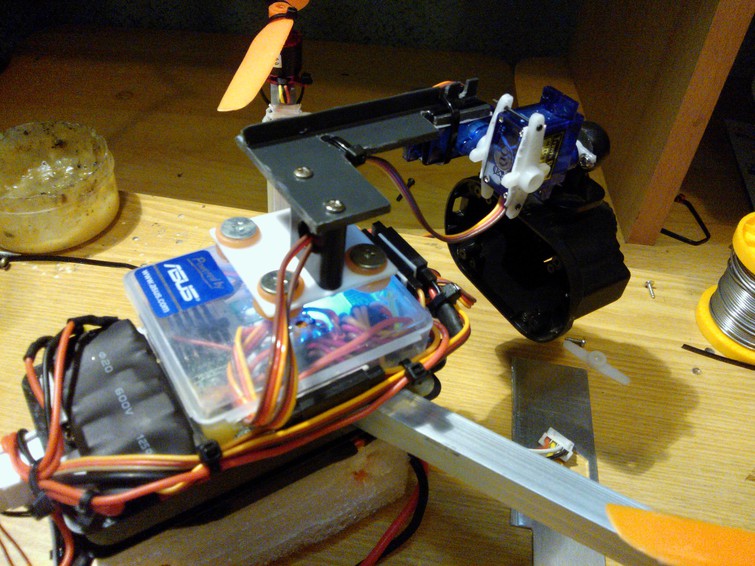
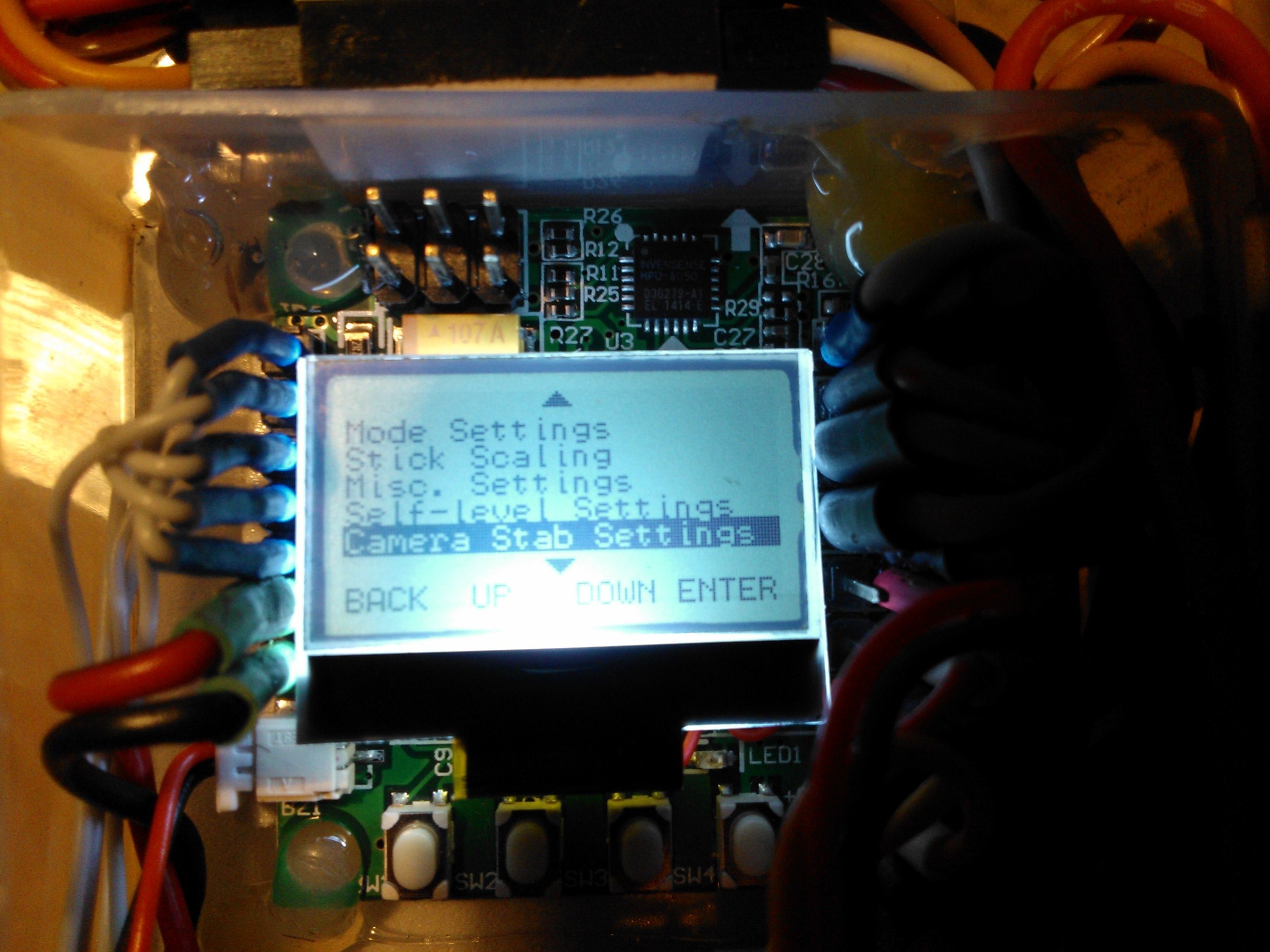
Доброго времени суток! На контроллере КК2 есть функции настройки подвеса реализованного на двух( в моём случае) сервах. Я решил поставить его на свой маленький коптер весом 320 грамм. У меня был маленький HD регистратор , правда вес у него солидный для коптера - аж 50 грамм! Чтоб уменьшить вес как можно максимум, я соединил сервы без переходов и применения лишних элементов. Поставил антивибрационные резинки от DVD рома - самый дешевый вариант:) В настройках платы переходим в раздел стабилизации камеры. Roll gain - сила отклонения сервы к которой приделана камера(больше цифра - лучше держит горизонт) Roll offset - установка , чтоб серва на которой камера, смотрела по горизонту (настраиваете и глядите чтоб камера висела ровно когда вы на неё смотрите). Pitch gain - сила отклонения сервы, на которой стоит серва с камерой (по вертикали, больше цифра - лучше держит вертикаль). Pitch offset - установка, чтоб серва на которой стоит серва с камерой смотрела как вам удобно - либо чуть с наклоном , либо ровно( у меня чуть под наклоном, так когда взлетаешь то видно больше ). Перед тем как ставить сервы , убедитесь что качалки на них поставлены посерёдке( чтоб одинакого отклонялись в обе стороны). На КК2 втыкайте ( я паял) выводы серв на выводы 7 и 8 двигателей. На 8ой цепляем серву которая вертикаль регулирует - держит серву с камерой, а на 7ой - серву горизонта - которая держит камеру. Вот фотки сборки......(В процессе думаю избавиться от корпуса регистратора и батареи в нём, потрошки весят 20 грамм:). На улице полетать не могу - ветер, добавлю видео с камеры позже! Конечно , с без коллекторными не сравнить , да всё равно хоть такая стабилизация..
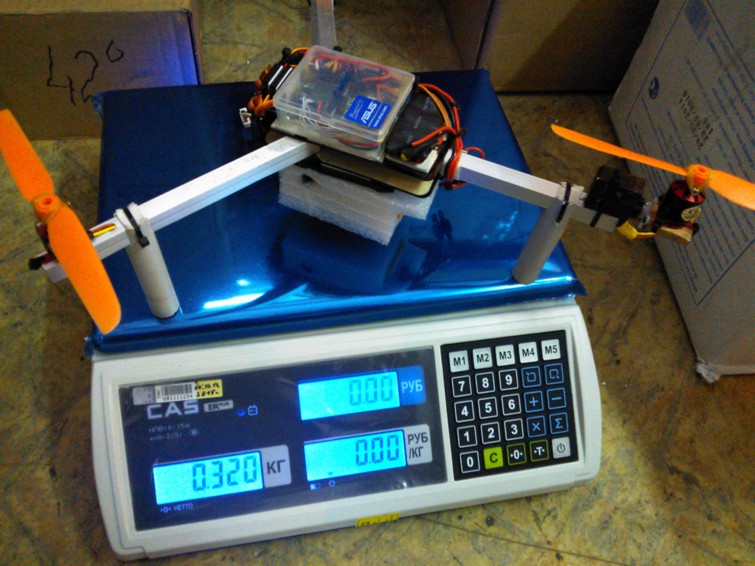
Вес коптера с батарейкой - 320 грамм

Две сервомашинки по 10 грамм
Резиночки силиконовые из под DVD рома и пластмасска какая нибудь невесомая:)
Регистратор какой нибудь не дорогой и маленький (в моём случае купленный на китайском рынке за 500р)
Желательно вытащить из него потрошки - а то тяжеловат для маленького коптера - 50 грамм, без корпуса и батарейки весит - 20 грамм
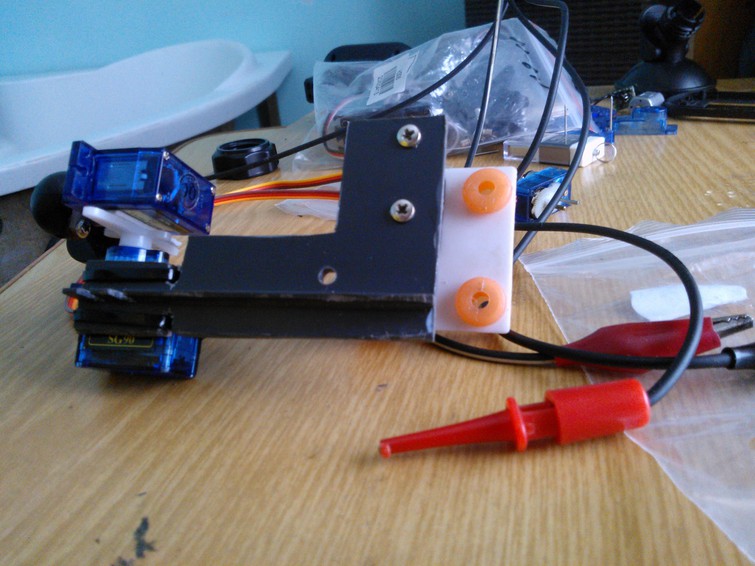
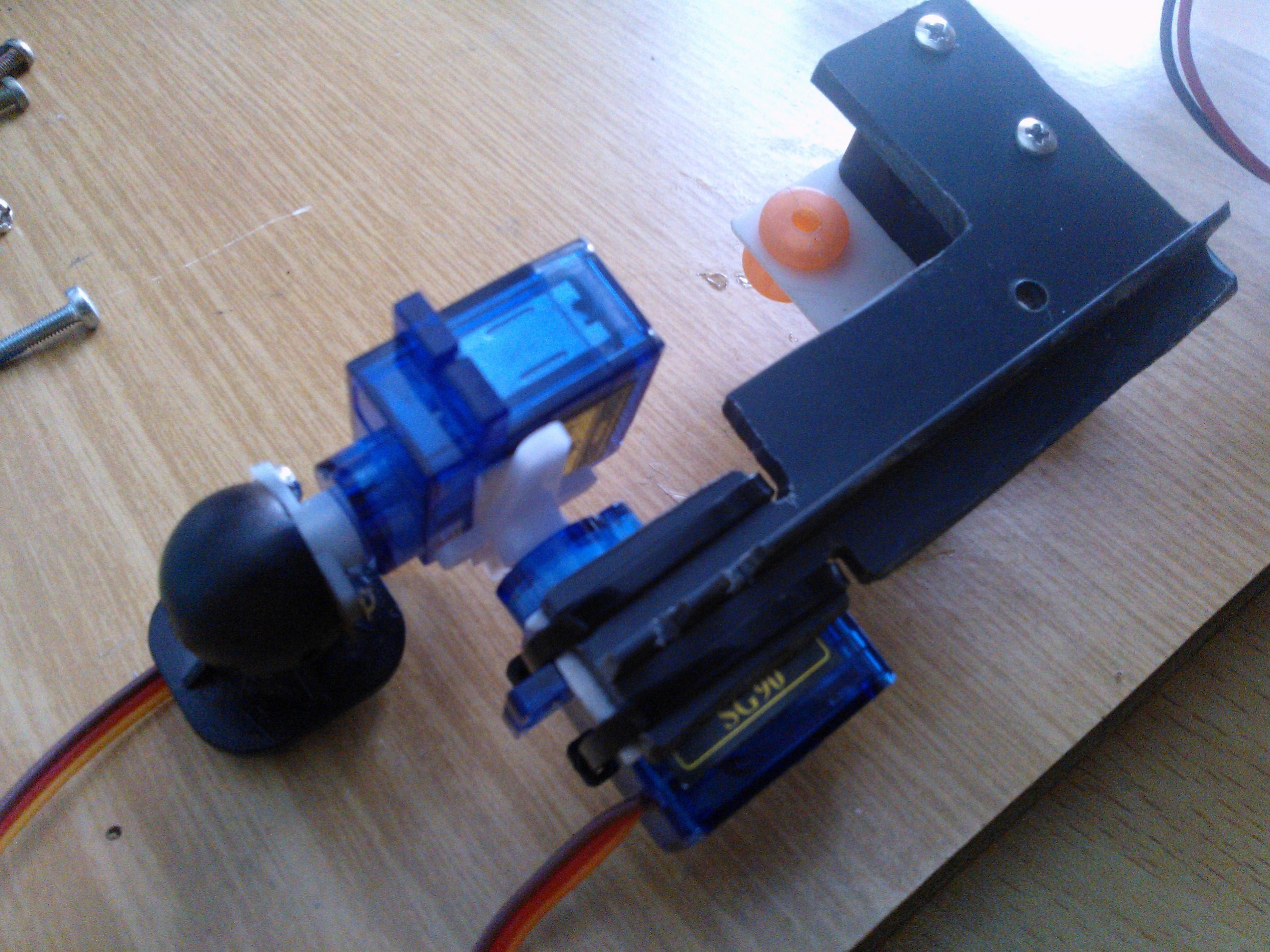
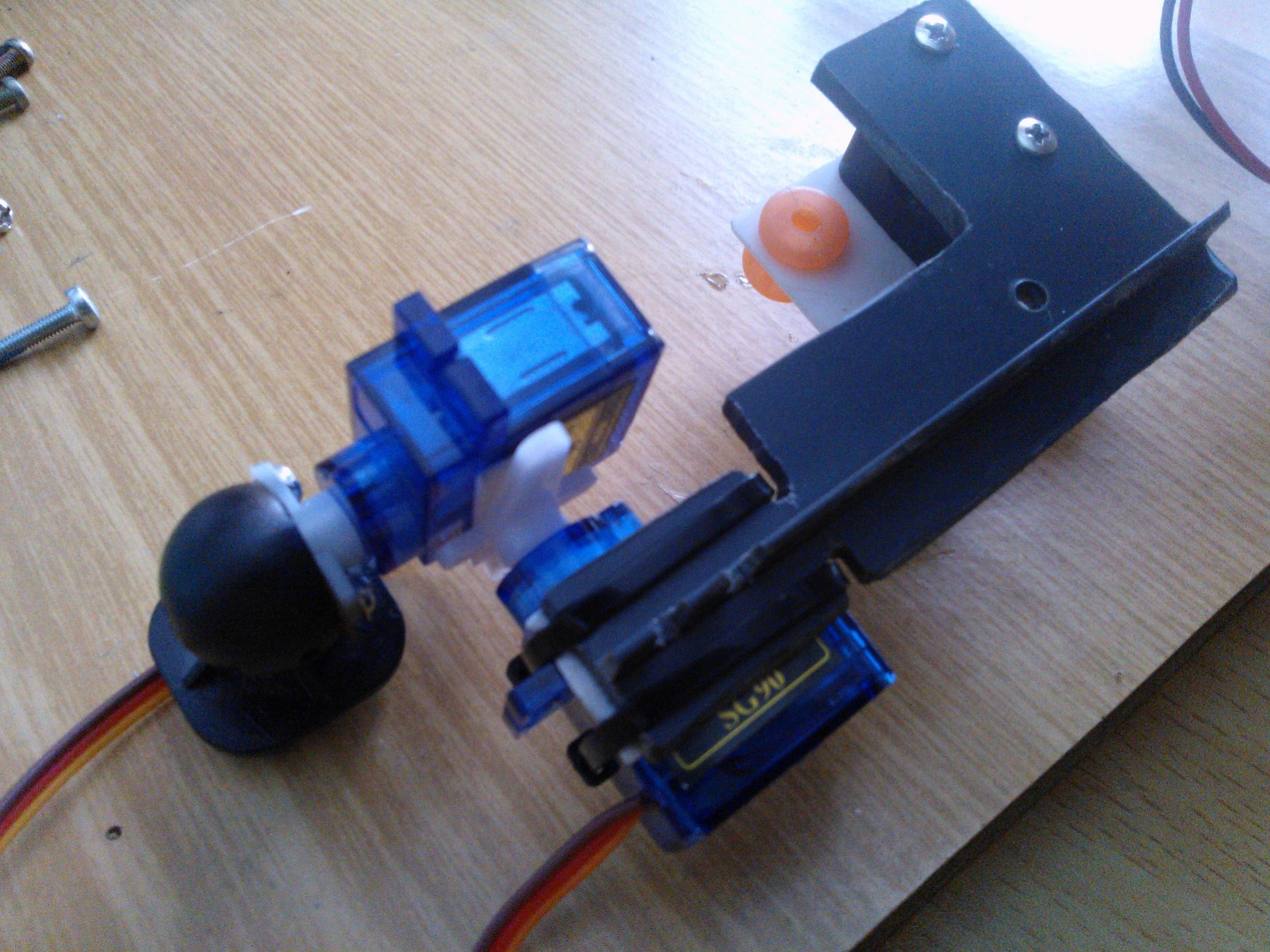
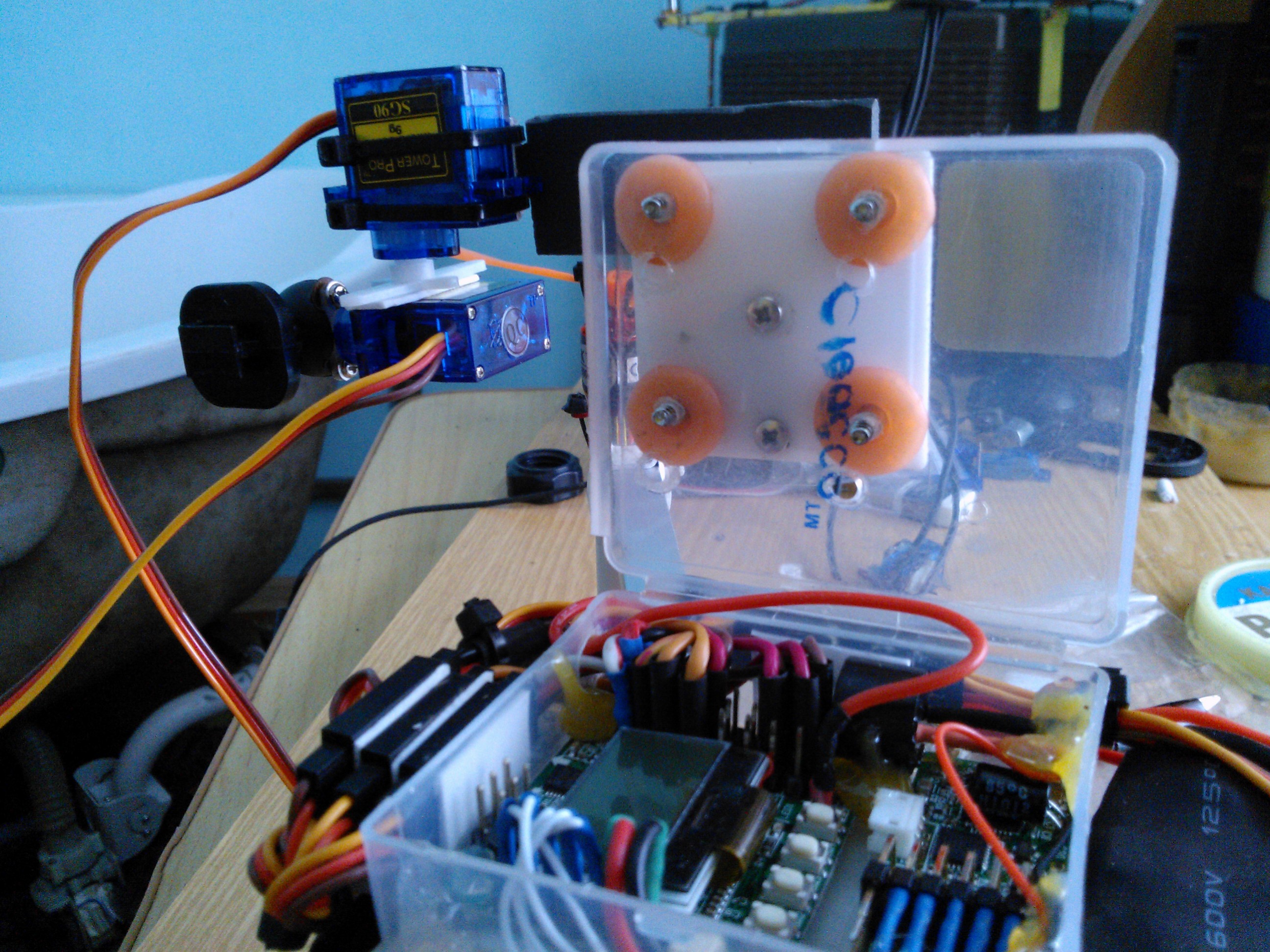
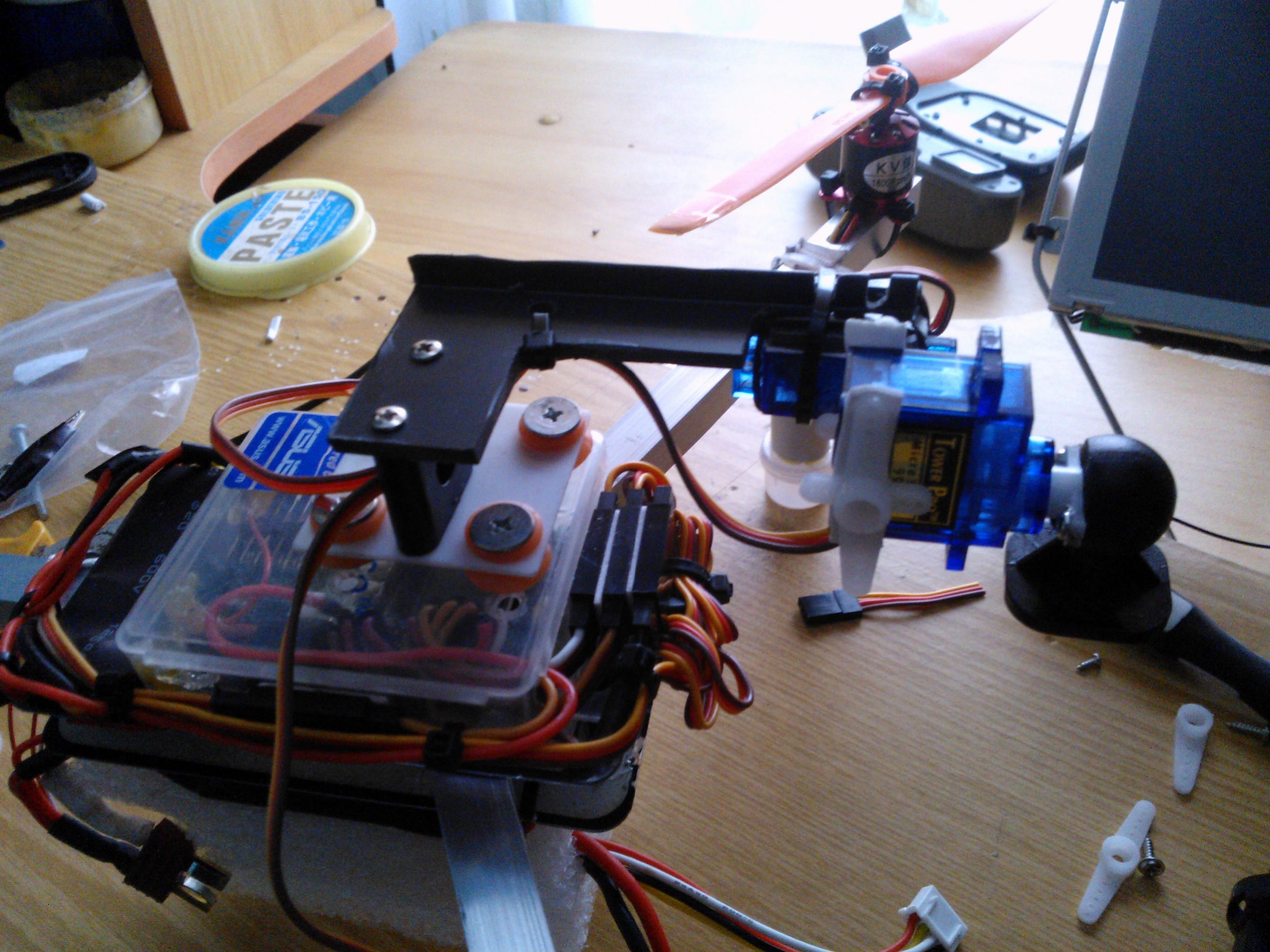
Шариковое крепление от него - срезаем немножко, чтоб установить качалку.

И крепим к серве.
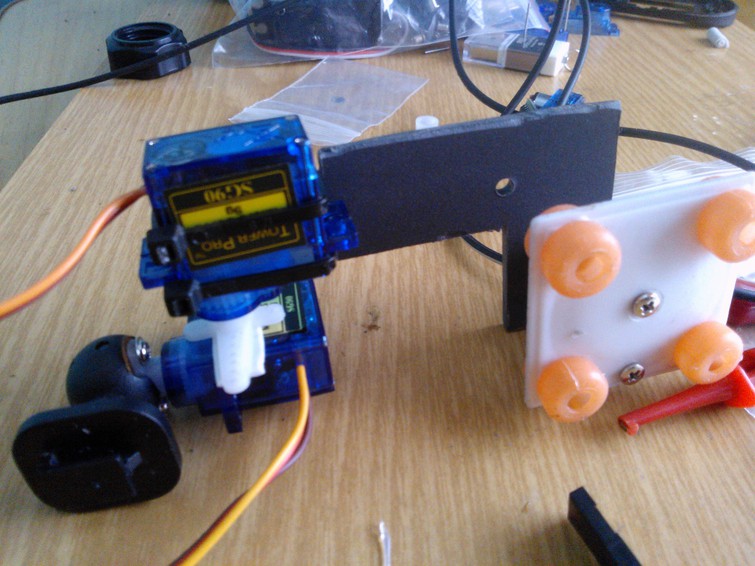
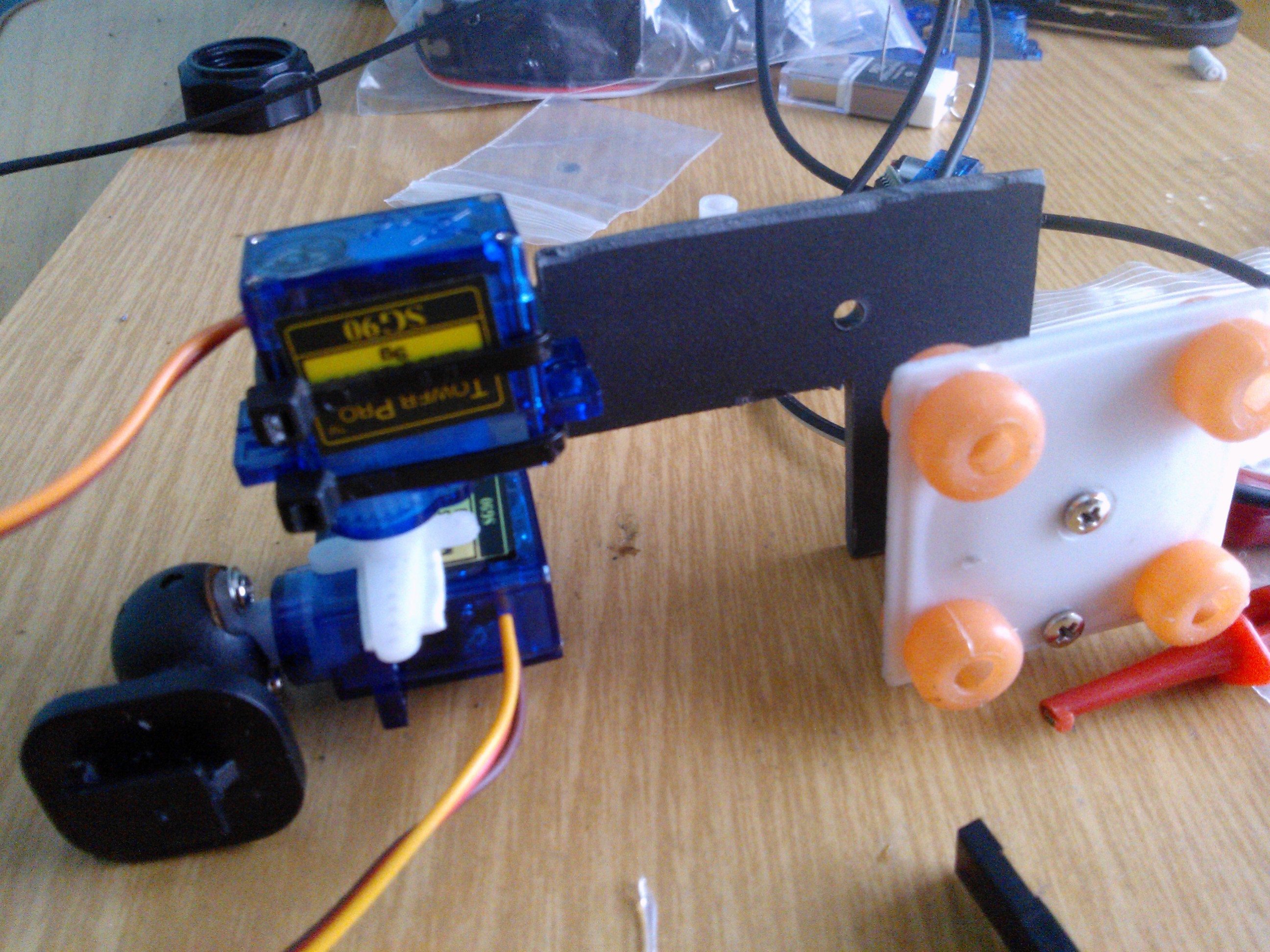
К серве крепим вторую серву и всё остальное. Пластиковое крепление я долго думал как сделать - это на усмотрение каждого, главное чтоб было пространство для движения приводов , камера не цепляла и висела ровно между лучей поптера..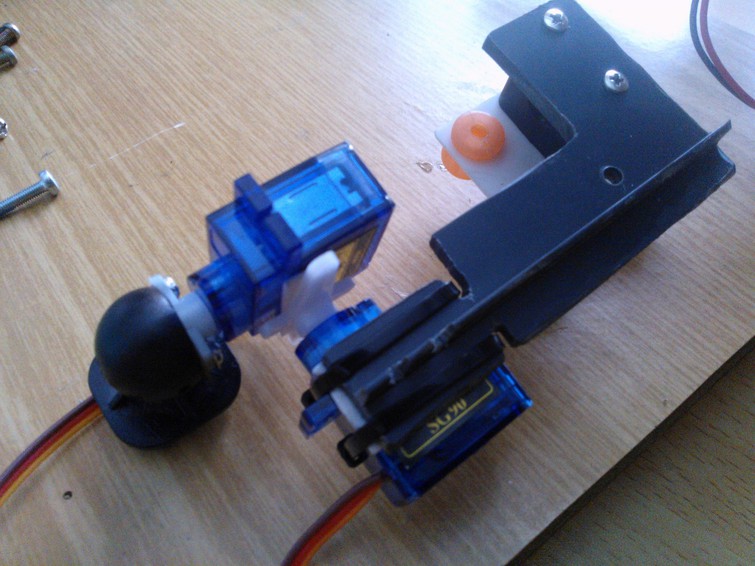
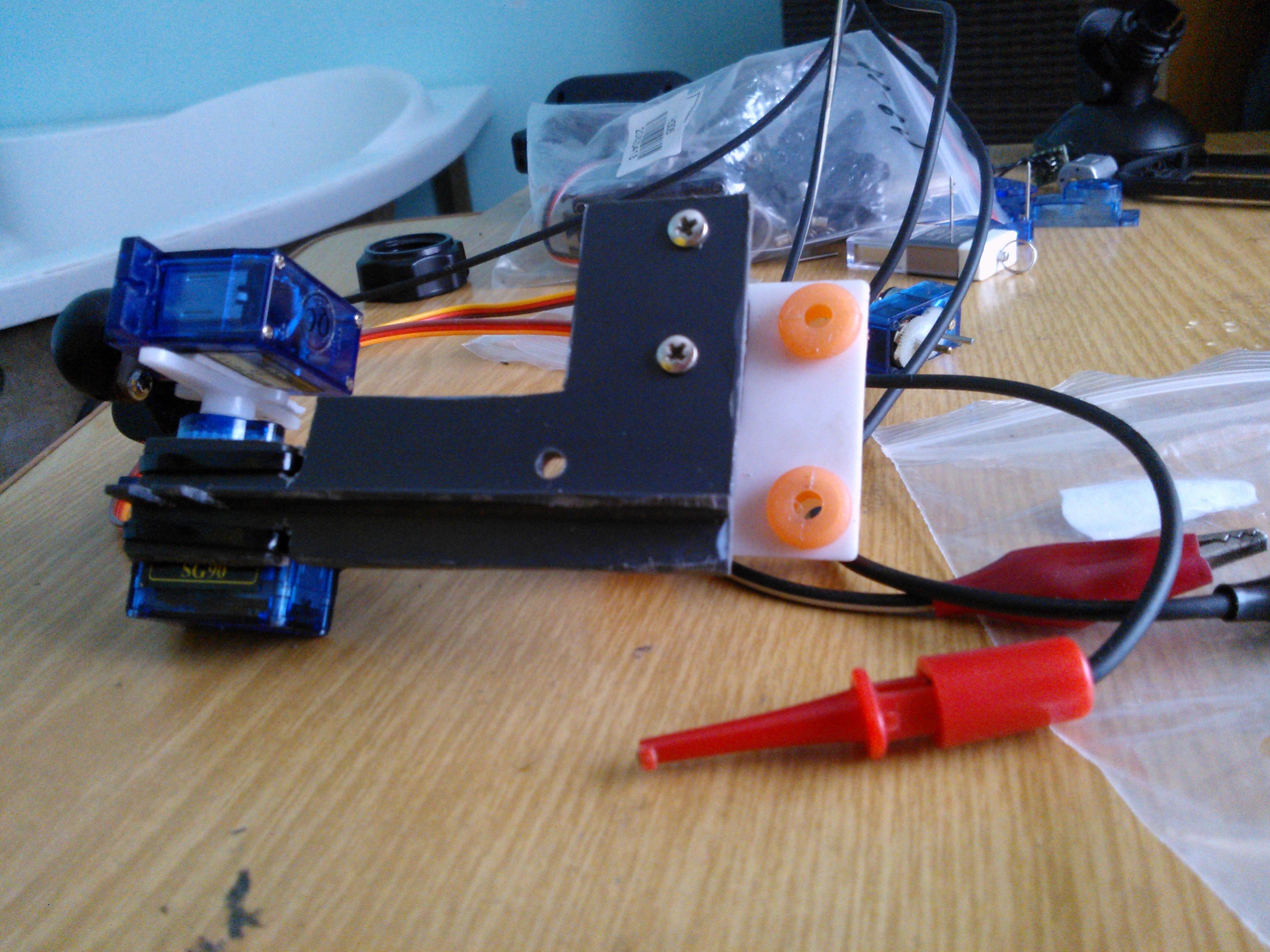
Дальше делаем разметку крепления платформы.
И собераем всё до кучи..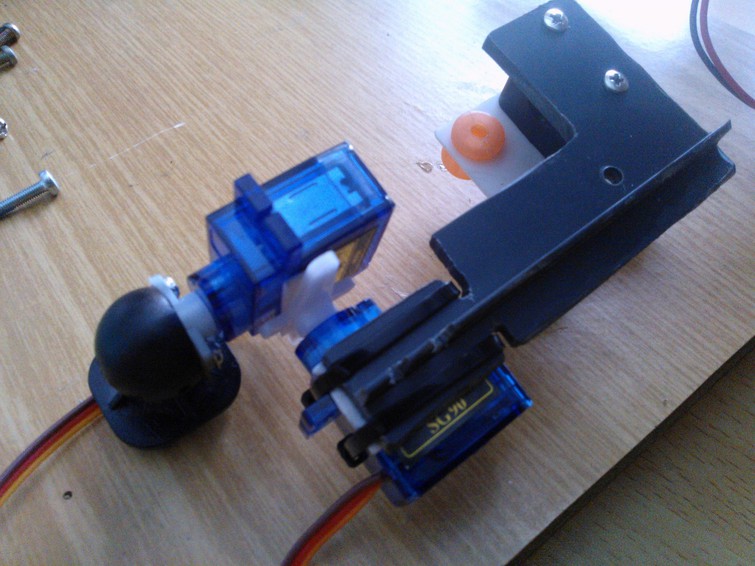
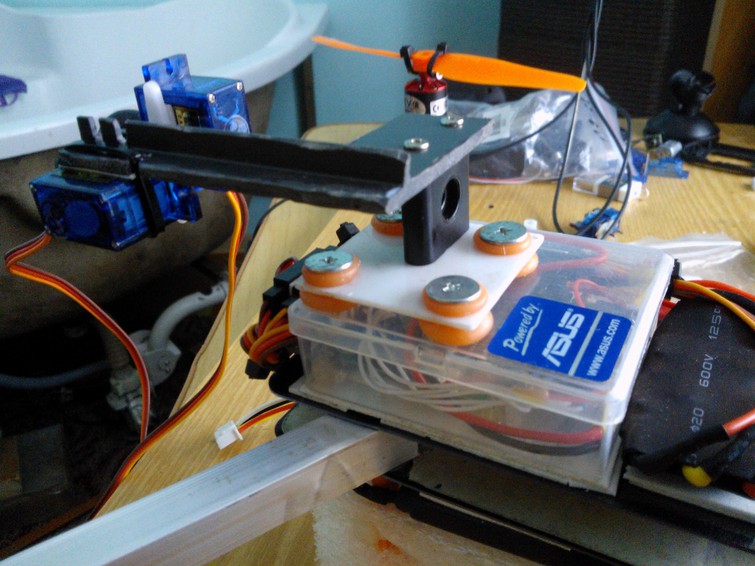
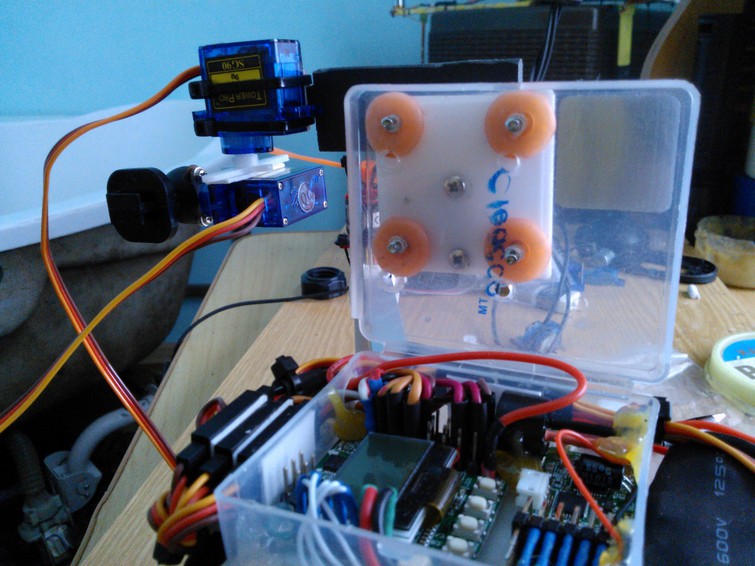
Запаиваем, настраиваем, не забываем про установку качалок посерёдке( ставим и рукой пробуем чтоб поворачивалась с одинаковым углом в каждую сторону до упора )
В моём случае Roll gain и Pith gain - это сила удержания серв в пространстве,когда вы летаете, а Roll offset и Pitch offset - это нахождение серв в покое в пространстве, когда нужно установить наклон камеры ,чтоб она висела так как вам нужно.
После всех манипуляций , коптер стал весить на 100 грамм больше:)
Вот и всё, как то так! Спасибо за внимание!:))
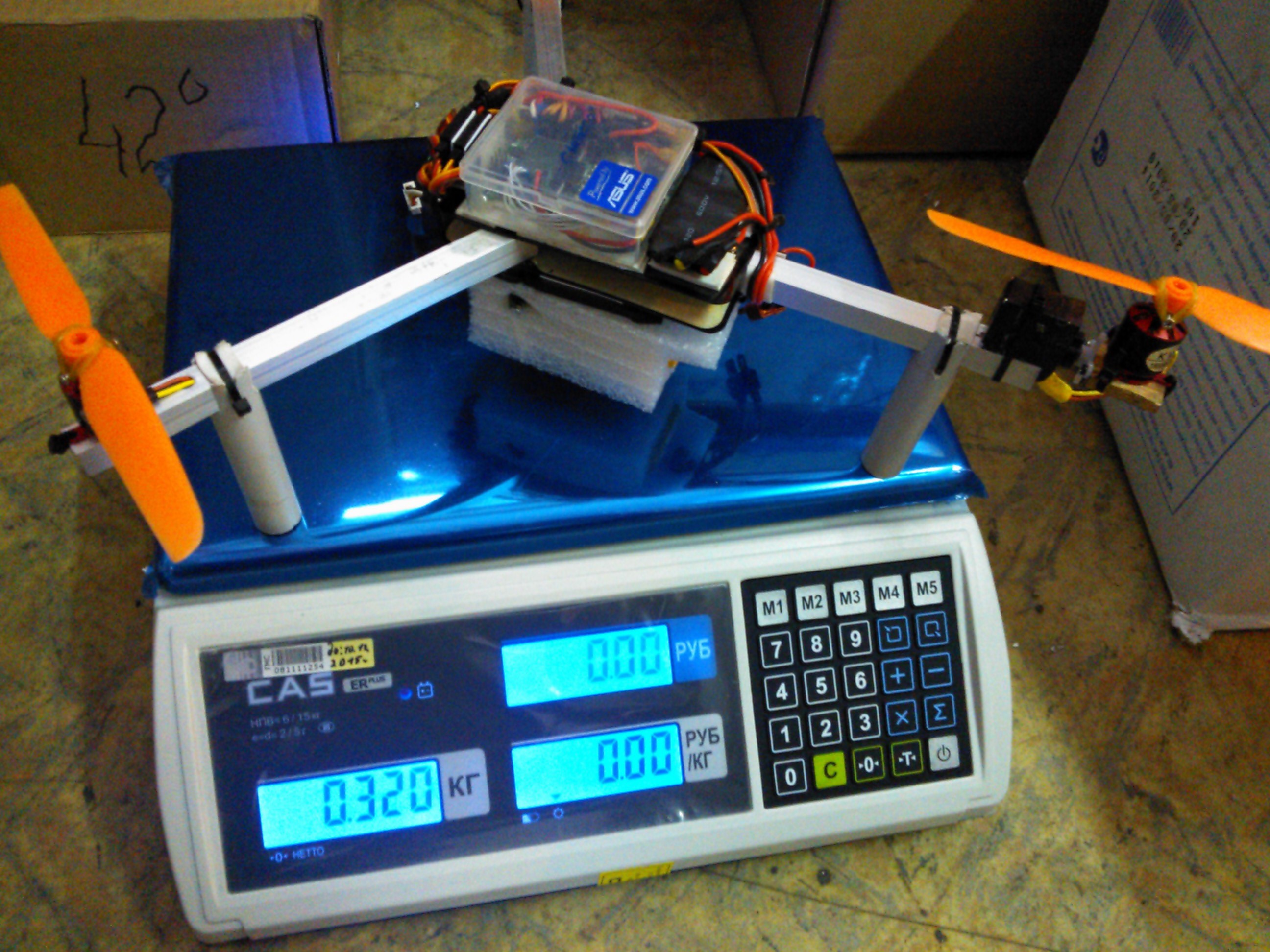
Вес коптера с батарейкой - 320 грамм

Две сервомашинки по 10 грамм
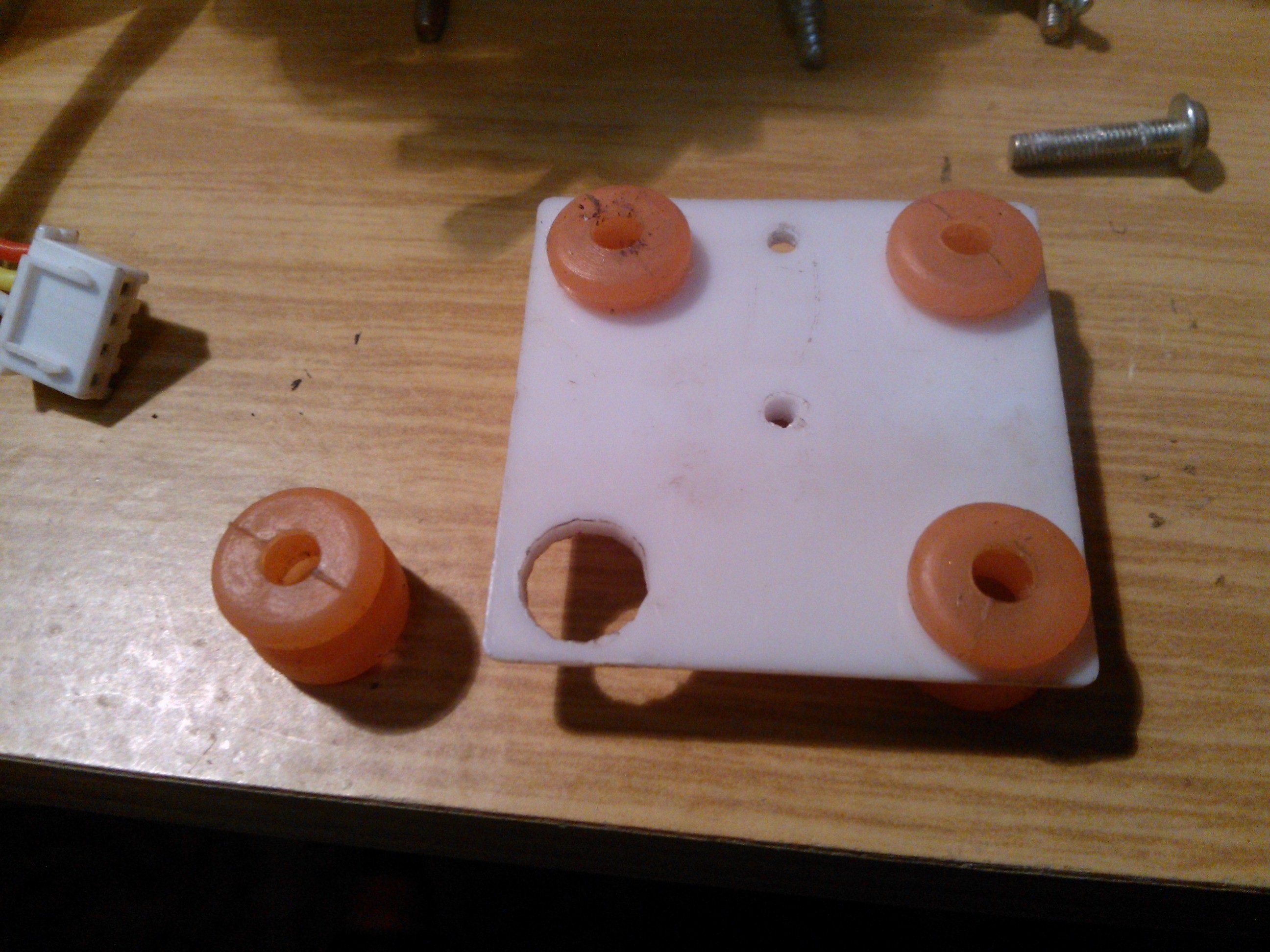
Резиночки силиконовые из под DVD рома и пластмасска какая нибудь невесомая:)

Регистратор какой нибудь не дорогой и маленький (в моём случае купленный на китайском рынке за 500р)

Желательно вытащить из него потрошки - а то тяжеловат для маленького коптера - 50 грамм, без корпуса и батарейки весит - 20 грамм

Шариковое крепление от него - срезаем немножко, чтоб установить качалку.


И крепим к серве.

К серве крепим вторую серву и всё остальное. Пластиковое крепление я долго думал как сделать - это на усмотрение каждого, главное чтоб было пространство для движения приводов , камера не цепляла и висела ровно между лучей поптера..
Дальше делаем разметку крепления платформы.

И собераем всё до кучи..
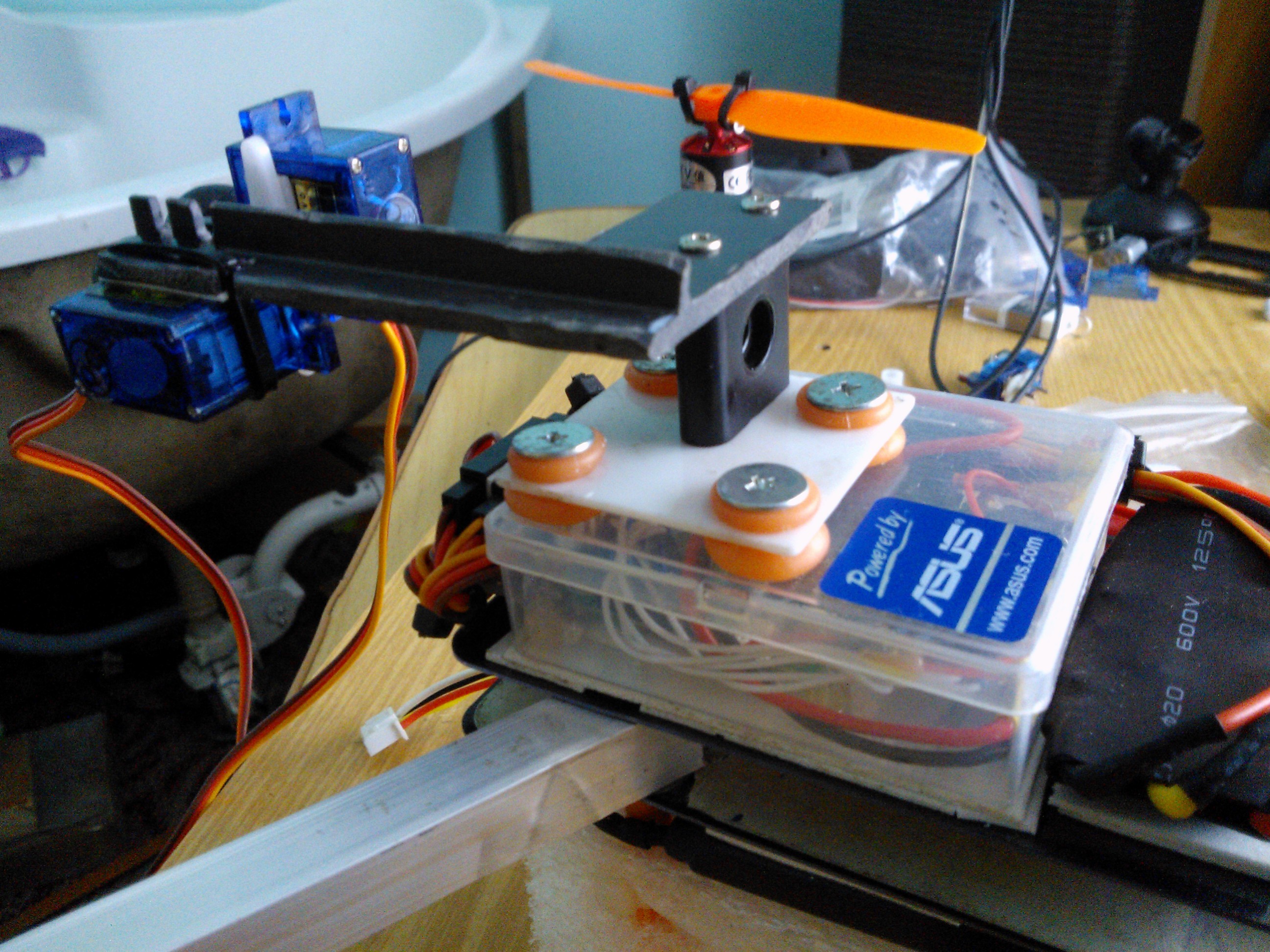

Запаиваем, настраиваем, не забываем про установку качалок посерёдке( ставим и рукой пробуем чтоб поворачивалась с одинаковым углом в каждую сторону до упора )
В моём случае Roll gain и Pith gain - это сила удержания серв в пространстве,когда вы летаете, а Roll offset и Pitch offset - это нахождение серв в покое в пространстве, когда нужно установить наклон камеры ,чтоб она висела так как вам нужно.

После всех манипуляций , коптер стал весить на 100 грамм больше:)

Вот и всё, как то так! Спасибо за внимание!:))













Подвес на сервах очень прост, никаких внешних датчиков он не предполагает, поэтому все зависит от самих серв и от уровня сигнала, который выдает сам полетный контроллер. В сервах плыть нечему, дело в самом полетном контроллере, а вот из-за чего это происходит, нужно смотреть (вибрации, качество инерциалки, программное обеспечение).