Всем доброго времени суток!
В прошлом мной был сделан «из-коробочный» обзор 6-канальной аппаратуры линейки XG, сравнительно недавно выпущенной компанией JR. Тогда я ограничился лишь первым впечатлением, сегодня имею некоторый багаж знаний, чтобы познакомить Вас, дорогие моделисты, с некоторыми особенностями функционала, представив их в произвольной последовательности. Переписывать из мануала все возможности аппаратуры я не вижу смысла, при желании Вы можете изучить их по ссылке на официальный сайт.

Также я не буду расписывать отдельно самолетные, планерные, вертолетные программы, просто отмечу некоторые интересные мне вещи, поделюсь впечатлениями, надеясь, что Вы найдете это занятным.
Привязка (BIND)
Эта процедура очень проста: устанавливаем перемычку в канал привязки приемника, включаем передатчик, подаем питание на приемник. В передатчике запускаем команду BIND. Однако, есть два ньюанса:
1) к одной модели, запрограммированной в передатчике, привязывается один конкретный приемник, и я, когда в первый раз сменил на пепелаце приемник, здорово перепугался, обнаружив, что тот не подавал никаких признаков жизни, даже лампочкой не мигал. После перебинда всё заработало.
2) Если у приемника имеется пристегивающийся телеметрийный передатчик, то перед привязкой его нужно подключить. Потом, если телеметрия не используется, его можно убрать.
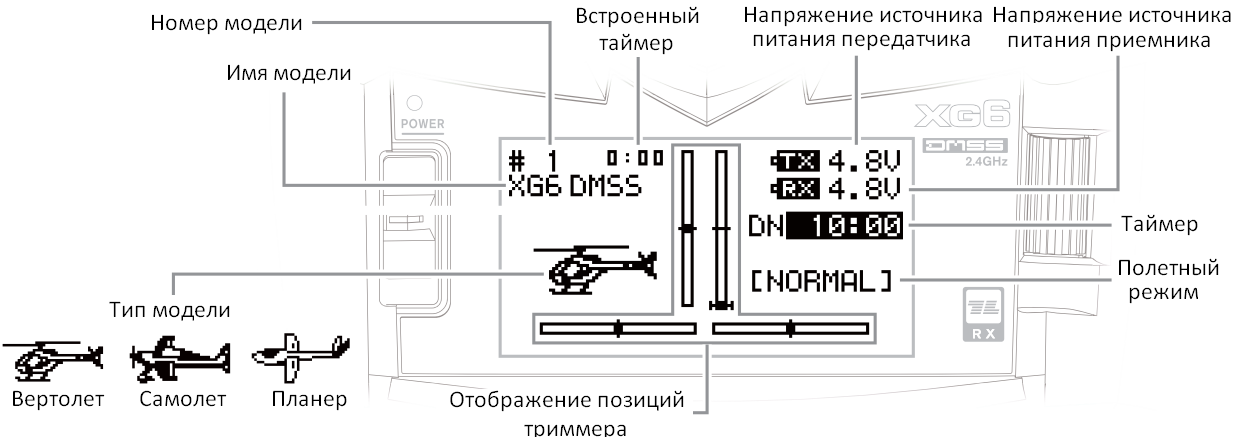
Главный экран выглядит так:
Меню
Из всего набора функций можно выжать своеобразный цимес: создать свой собственный список наиболее использующихся опций с целью сокращения времени на их поиск.
Практически любую команду можно запрограммировать на желаемый тумблер/кнопку, при этом выбирается, в каком положении у тумблера будет вкл, в каком - выкл. Также можно задать два условия: команда сработает, если и тумблер будет включен, и кнопка будет зажата. Изображение ниже показывается всякий раз, когда мы привязываем функцию к тумблеру/кнопке:

Здесь: "FLAP SW" и "GEAR SW" - соответственно левый и правый тумблер, "TIMER MO" и "TRAINER MO" - правая и левая кнопки (речь идет о самолетной программе).
Встроенный таймер
Зная, сколько часов способен проработать передатчик от данных аккумуляторов, можно оценивать запас оставшегося заряда, используя встроенный таймер, который запускается с включением аппаратуры и приостанавливается с её выключением. После установки свежезаряженных аккумуляторов таймер придется обнулить. (Отмечу здесь, что питание передатчика осуществляется от 4 элементов типа АА, зарядка Ni-MH через аппаратуру невозможна).
Закрылки/флаппероны
Очень порадовала возможность замедления выпуска закрылок (опускания флапперонов), присущая, как правило, более дорогим классам аппаратуры. Замедление можно установить до 2 секунд, то же касается и канала выпуска шасси. Можно задать меру отклонения и время замедления микшируемого с выпуском закрылок канала руля высоты для коррекции поведения модели. Думаю, не нужно говорить о преимуществах данной функции в сравнении с резким «выстреливанием» механизации крыла и шасси.
--------
Есть ещё одна полезная функция - сигнал о невыключенном питании. Зуммер пропищит через 10, 30 или 60 минут после того, как о включенном передатчике забыли.
Качество связи
За сезон полетов каких-либо перебоев в связи замечено не было. Эксплуатируя аппаратуру, я не отпускал модель от себя дальше, чем 300-400 метров. Этого расстояния более чем достаточно для обычных полетов, а для FPV все равно несерьезно использовать стоковый набор 2,4 ГГц, «бьющий» обычно в пределах километра. Поэтому я не задавался целью проверять максимальную дальность связи. Надеюсь, что результатами своих экспериментов касательно неё Вас порадует более пытливый пользователь.
Телеметрия
Компания JR выпустила для протокола DMSS следующие телеметрийные «глазки»:
Датчик высоты TLS1-ALT
Высота измеряется косвенно, через атмосферное давление, которое уменьшается с увеличением высоты, так это и работает. Точность измерения составляет 2 метра, чего, в общем-то, хватает. Данная разбежка как-то не вяжется с показаниями на экране, которые мелькают с точностью аж до десятых долей метра. При каждом включении на земле датчик калибруется в «ноль». В передатчике три независимых программируемых условия, выполнению каждого из которых соответствует 1, 2, и 3 пика, чтобы их различать. Условия бывают:
- ниже заданной высоты,
- выше заданной высоты,
- промежуток между двумя значениями.
Я настроил так: с +5 до 30 метров – сигнал об опасно низкой высоте. Почему не с нуля? Чтобы не раздражало пиканьем на земле. Выше 150 метров раздается сигнал «высоковато, хозяин». К сожалению, на базе этого датчика нельзя организовать функцию вариометра, хотя передатчик её поддерживает, наверное, соответствующий датчик еще не вышел в продажу.
Датчики температуры
Здесь всё просто. Прикладываешь к чему–нибудь интересующему и наблюдаешь, как оно нагревается/холодеет. Диапазон измерений версии TLS1-TMP составляет от 10 до 90 градусов Цельсия, к жаркому месту прикладывается непосредственно платка. TLS2-TMP измеряет в пределах 30-230 градусов и чувствительным элементом уже является клемма, подкладываемая, например, под винт головки цилиндра ДВС.
Датчики оборотов двигателя
Их японцы предлагают аж три вида, каждый работает по своему принципу. TLS1-ROT содержит в себе датчик холла, а на фланец двигателя придется лепить на клей магнитики (до чего же непрактичный способ!). TLS2-ROT имеет оптический датчик, работающий на расстоянии нескольких сантиметров. И наконец, TLS3-ROT годится лишь для бесколлекторников: чувствительный к импульсам проводок цепляется к любому из трёх контактов движка - и вуаля!
--------
Также японцы постарались над выходом в свет датчика напряжения силовой батареи с лимитом в 6 банок LiPo, и чудо-коробочки, что измеряет напряжение до 18В и ток до 80А. С помощью последней вычисляется количество оставшейся емкости силовой АКБ, и естественно, можно установить такое её значение, при котором аппаратура даст знать, что модель пора возвращать на землю. Оба вышеописанных девайса призваны включаться в разрыв силовой цепи, внося потери на контактах. Ещё в продаже имеется разветвитель для подключения к приемнику нескольких датчиков, но проверено на личном опыте, что подойдет и обычное параллельное соединение их посредством Y-разъема для серво.
---------
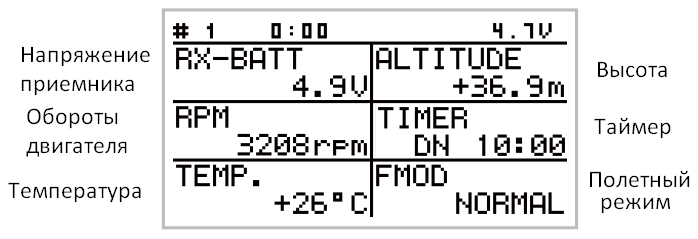
Информация с датчиков представляется в следующем виде (с возможностью отображения любого параметра на какой угодно "полочке"):
Опыт использования телеметрии
Телеметрия меня, честно сказать, не порадовала. Во-первых, устойчивый прием наблюдается в пределах 200 метров. Такого расстояния хватит разве что для паркфлаера, для большой серьезной модели будет маловато. Хотя можно было бы поэкспериментировать с разнесением приемной и передающей антенн, возможно, что можно добиться не столь плачевных результатов. Во-вторых, существенное запаздывание сигнализации в некоторых случаях превращает функцию телеметрии в бесполезную погремушку. Я думал, что инфа будет запаздывать в крайнем случае на одну секунду. Чего там стоит организовать в диапазоне 2,4 ГГц обновление сигнала, скажем, с частотой 5 герц? Оказалось, я слишком раскатал губу: при первых испытаниях стало понятно, что порой сигнала о низкой высоте можно дождаться лишь увидев модель вморкованной в планету. (и это с установкой alarm’а начиная с 30 метров), Причем тормозят как цифры на экране, так и выдача звукового сигнала (!). Что ж, на телеметрию надейся, а сам не плошай.
-------
Ну, вот и всё, что хотелось рассказать. В заключение отмечу, что работа с аппаратурой оставила приятные впечатления, за исключением телеметрии. Высокое качество корпуса передатчика несколько компенсируется мягким бутылочным пластиком, в который завернуты приемники, что не смотрится рядом с их стоимостью, а бюджетный 4-х-канальник так и вовсе запихнули в ламинированную бумагу. Но других неприятных моментов не обнаружено, несмотря на то, что я старался составить критический обзор :)
До свидания!












