Появился у меня этот чудо автопилот и спустя около трех месяцев я понял что надо срочно делать инструкцию для чайников, понял потому как вопросы лезут как червяки
.b1cb02c65ca3b962e5a4a83e73131de0.prev.jpg)
Про свои впечатления говорить не буду так как сказано уже многое, скажу одно, что цена качество супер и пока я не нахожу ничего что бы меня разочаровала, напротив открываю всё новые возможности этого чуда
.b1cb02c65ca3b962e5a4a83e73131de0.jpg)
И так приступим, наш аппарат уже собран осталось настроить для этого нам понадобится программа мишень планер (вот он последняя версия ) компьютер и немного терпения и внимательности
Ообязательная настройка:
дополнительная настройка:
бонус демонстрация управления с наземки-компьютера (ОПАСНО МАТЕРКИ):
Хочется ещё сделать описание программы мишень планер(разобрался уже на 95%) ТК очень там много всего и режимов куча и настроек как до сниму выложу сюда же!
смотрим логи чёрный ящик и логи телеметрии в самом конце
подробно о подключении регуляторов и вращении моторов
Конденсатор ставить, нет?
тут есть настройки для разных пультов в списке больее 10 разных http://copter.ardupilot.com/wiki/common-six-modes/
подключение моторов http://copter.ardupilot.com/wiki/connecting-your-rc-input-and-motors/
о мишенпланере
проверить калибровку акселерометра: подключится к мишенпланеру подождать пока барометр покажет высоту без сильных скачков (буквально секунд 20-30) далее глядя на высоту наклонять аппарат в разные стороны высота не должна менятся
включите логи (default+IMU) как показанно тут: http://copter.ardupilot.com/wiki/downloading-and-analyzing-data-logs-in-mission-planner/ чтоб после первого вылета проверить какая вибрация ну и просто чтоб если вдруг авария узнать что было
ТУТ ОБНОВЛЯЕМАЯ ВСЕГДА САМАЯ НОВАЯ ИНСТРУКЦИЯ но на вражеском языке :
http://copter.ardupilot.com/wiki/introduction/
продолжение тут http://www.parkflyer.ru/55835/blogs/view_entry/4252/
Соблюдайте технику безопасности снимайте пропеллеры при настройке!
Решил что писать очень долго и много по этому снял видео: (забыл сказать после прошивки нужно сделать ресет, делается в окне терминал, там конект, начинаем печатать: setup, reset, просит нажать Y после просит перезагрузить надо нажать кнопку на плате) после можно настраивать
Ообязательная настройка:
дополнительная настройка:
бонус демонстрация управления с наземки-компьютера (ОПАСНО МАТЕРКИ):
Хочется ещё сделать описание программы мишень планер(разобрался уже на 95%) ТК очень там много всего и режимов куча и настроек как до сниму выложу сюда же!
PS: я не претендую на + просто хочется помочь людям в освоении этой мега платы ТК вещь очень стоящая
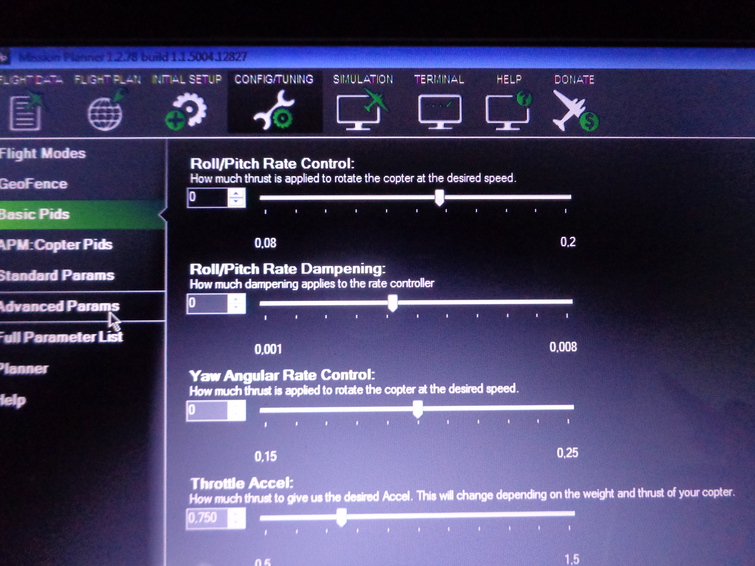
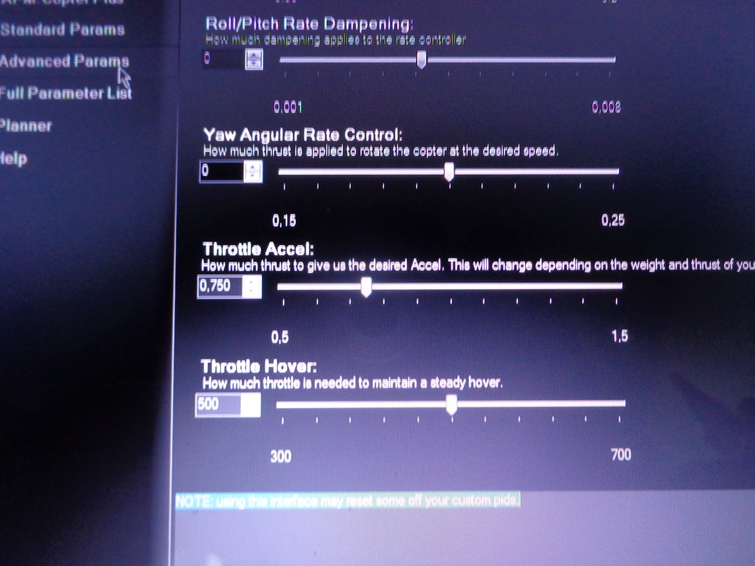
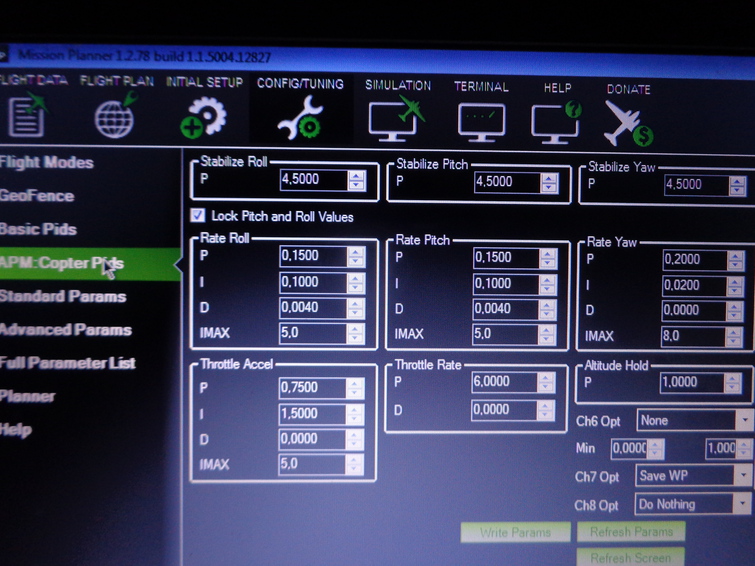
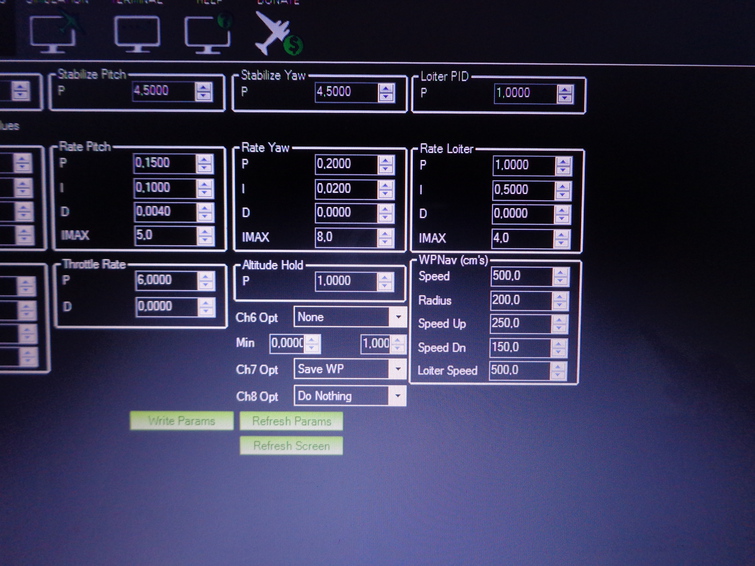
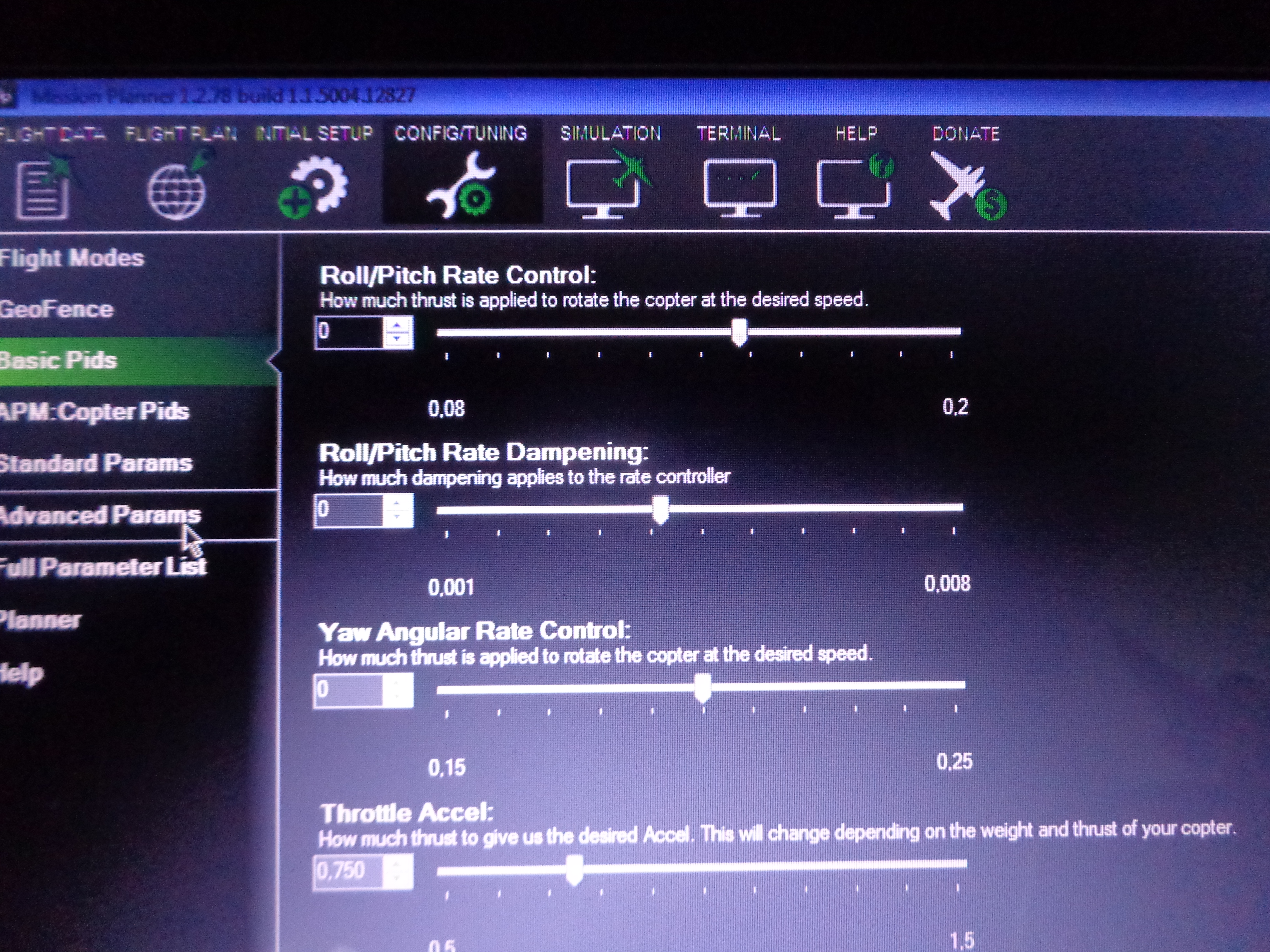
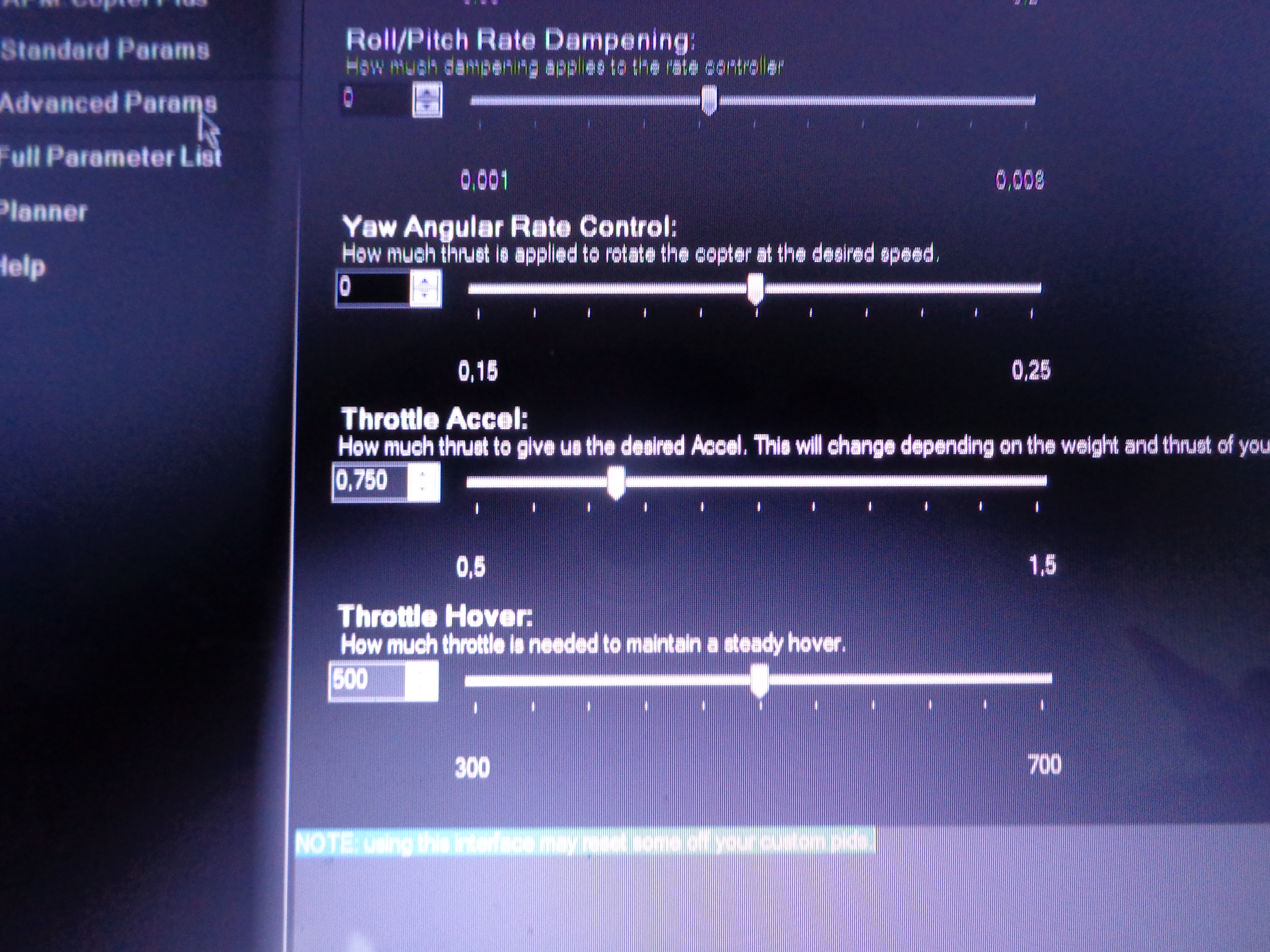
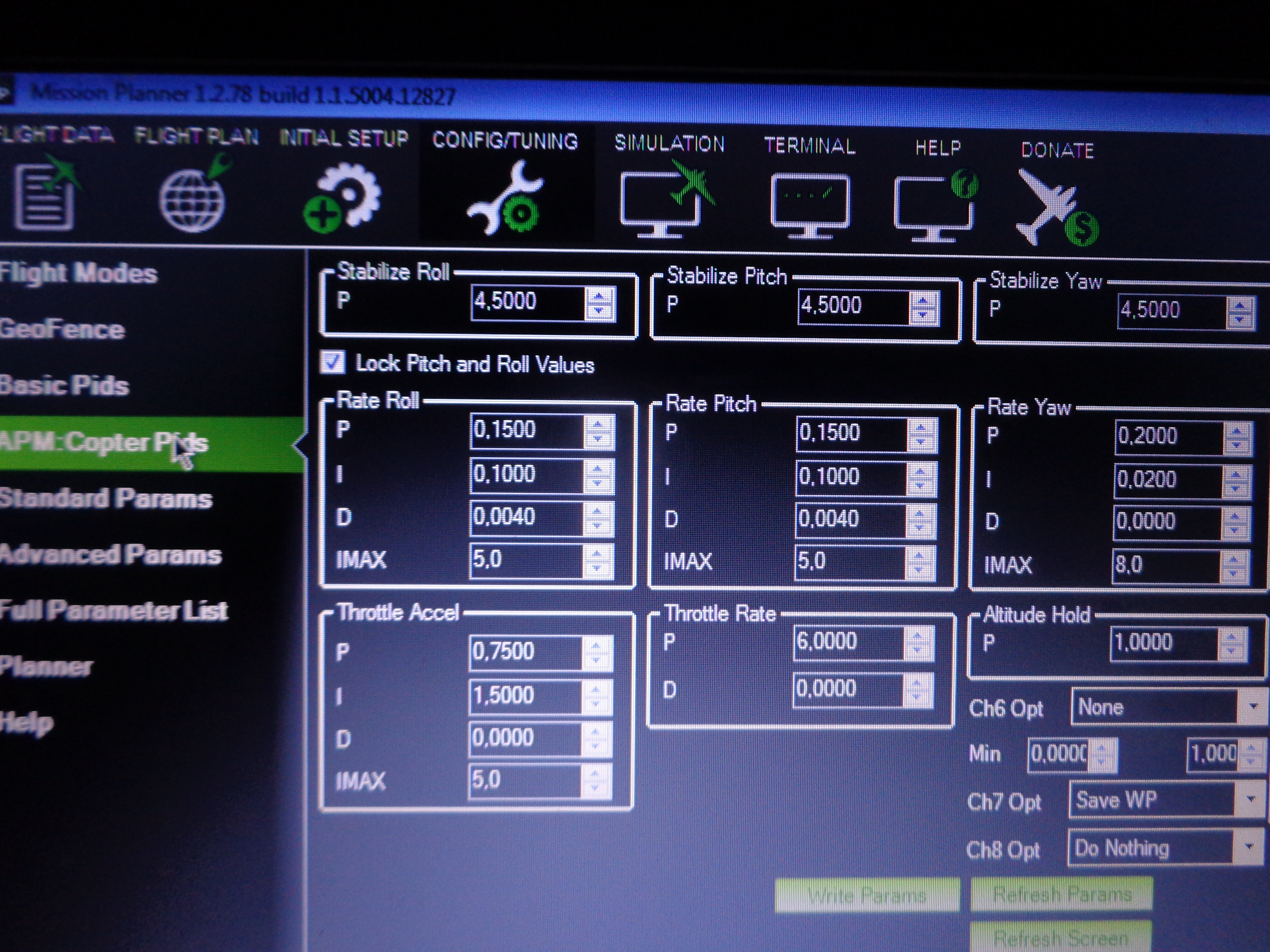
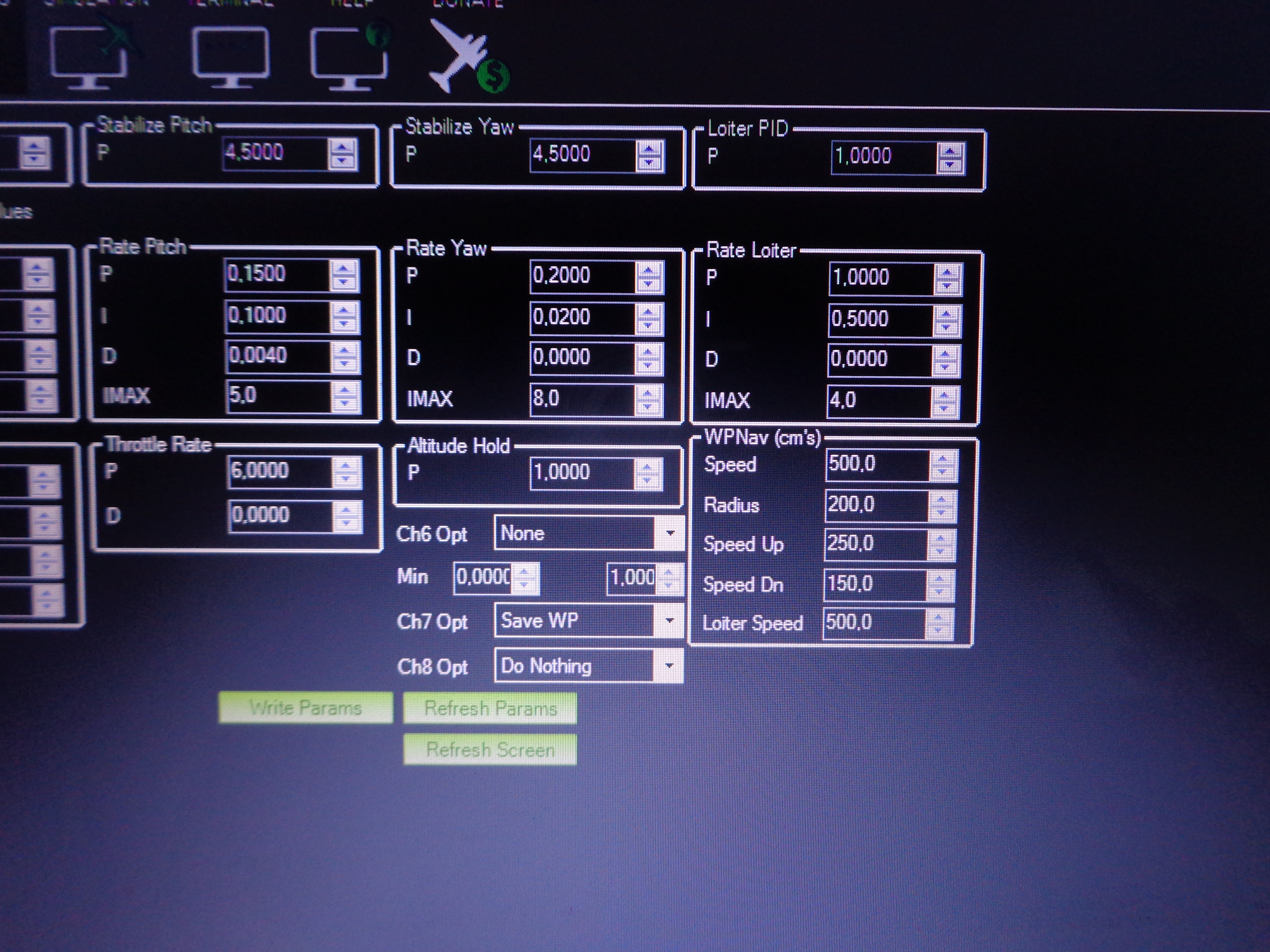
просятся фото дефолтных настроек вот они:
смотрим логи чёрный ящик и логи телеметрии в самом конце
подробно о подключении регуляторов и вращении моторов
Конденсатор ставить, нет?
тут есть настройки для разных пультов в списке больее 10 разных http://copter.ardupilot.com/wiki/common-six-modes/
подключение моторов http://copter.ardupilot.com/wiki/connecting-your-rc-input-and-motors/
о мишенпланере
проверить калибровку акселерометра: подключится к мишенпланеру подождать пока барометр покажет высоту без сильных скачков (буквально секунд 20-30) далее глядя на высоту наклонять аппарат в разные стороны высота не должна менятся
включите логи (default+IMU) как показанно тут: http://copter.ardupilot.com/wiki/downloading-and-analyzing-data-logs-in-mission-planner/ чтоб после первого вылета проверить какая вибрация ну и просто чтоб если вдруг авария узнать что было
ТУТ ОБНОВЛЯЕМАЯ ВСЕГДА САМАЯ НОВАЯ ИНСТРУКЦИЯ но на вражеском языке :
http://copter.ardupilot.com/wiki/introduction/
продолжение тут http://www.parkflyer.ru/55835/blogs/view_entry/4252/













есть видео но я не понял что там он делает
Добавлю сюда же еще 2 вопроса (новый коммент не создается):
1) Скажите пожалуйста, а почему у меня элеватор инвертирован? Я нажимаю "вперед", а он летит ко мне... Инвертирую на пульте - ему пофиг.
2) И почему-то сбрасывается калибровка на стики пульта. После калибровки в МишнПланнере, армится нормально. Выключу-включу борт, не армится...
можно купить файлсейвер самый простой http://www.parkflyer.ru/55835/product/317847/
http://www.parkflyer.ru/product/4283/
Просто у меня сейчас на втором коптере (первый улетел и не обещал вернуться) - стоит FRSKY. Есть мегапонятная инструкция по настройке фэйсейва применимо к коптеру? Если действовать строго по инструкции к фриске - там написано что-то вроде "задаете управляющее воздействие - что должен делать при фэйлсейве, и жмете кнопусечку". Это хорошо для самолета например на малом газу кругами полетать. А для коптера? Или настроить отдельный канал типа "возврат на точку HOME по ЖПС по щелчку тумблера" и в МП настроить значение на канале.... на каком и сколько единиц?
К примеру, есть у меня переключение полетных режимов на двух тумблерах. Например, хочу на шестом полетном режиме включить возврат на точку. Пока есть связь - это возможно (наверное), а если сигнал потерян? Можно какой - нибудь мейл для связи (мой - 5timur5[собака]мэйлТочкаРу).
http://copter.ardupilot.com/wiki/throttle-failsafe/
должно помоч
сейчас сижу думаю как дополнить, какие ещё частые вопросы-проблеммы бывают, советы, будет с дня на день! ,)
ну а пока проверь:
подключи к мишенпланеру (пропеллеры сними вообще пока не разберёшся!!!) включи пульт, включи ходовой аккумулятор(борт), смотри в первом окне планера (где горизонт показывает) что пишет при арминге...
где то уже читал про эту проблемму...
если заведётся то отвечу что это
Сейчас все кинутся повторять и потом ломать. Надо с чувством расстановки все самому познать и осмыслить, в этом поможет прочтение форума, а не такое типа "Настрой за 28 минут", ничего не пойми, сломай за 5 секунд и потом задавай вопросы на форуме.
Юра привет. Ты на свой квадрик телеметрию поставил? Что и куда подключать?
Датчик тока появился. Я его тоже с телеметрией купил. Прийдет буду подключать. По схеме питание от датчика тока надо отключать и ставить отдельное питание как сейчас?
Кстати я купил корпус для платы, бародатчик надо раскутывать или нет?
Сонара на сайте нет но есть вот такая штука http://www.parkflyer.ru/28800/product/682807/ Ты ее не подключал? Пишут то применяется на квадриках от столкновения.
Юра привет. В телеметрии куча раздельных проводов (на фото) схемки у тебя нет, какой куда подключать.
В датчике тока питающие провода отключить надо по схеме.
Ты по FPV когда летаешь, как далеко, и какая частота на пульте и видеосистеме?
не понравилось медленно отрабатывает (для фпв хватит)
питание серв надо брать нне с платы а отдельно!!! (подключается только управляющий провод) иначе есть шанс отказа платы в полёте