
Дисклеймер.
Предупреждаю заранее — ниже будет «многАбукАФФ» от новичка. Сей опус направлен на новичков, потенциальных новичков и тех, кто хочет стать мультироторными коптеристами. Профи могут не читать (ничего нового не найдут для себя), не обижусь. Просто мне, как новичку тяжело дались некоторые вещи, о которых я обязательно напишу. Для профи всё это — само собой разумеющееся, а для меня совсем неочевидно было.
Итак, лирическое отступление:
Летом этого года оформилось желание — хочу полетать на Р/У. Перелопатив приличное количество форумов, стал склоняться к квадрокоптерам и к самолетам. Причем хочу летать FPV и снимать виды на камеру. Поняв, что невозможно объять необъятное и что нужно начинать с малого, решил сосредоточиться на постройке квадрика.

От настоящего AR DRONE у него только внешний вид. При заказе понимал, что эта дешевая китайщина нормально летать не будет, но мне надо было понять — моё ли это вообще хобби, или не стоит даже соваться. За 1500 (500 за товар плюс 1000 доставка, приехал быстро) я получил летающий квадрик с защитой пропеллеров (что очень важно для новичка), 4-канальным пультом р/у, зарядник и 4 запасных пропеллера (2 «левых», 2 «правых»).
Получив это, и налетав около часу в общем счете, понял — я ХОЧУ летать. Зарегистрировался на этом сайте, оформил заказ на комплектующие для постройки «взрослого» квадрокоптера. Пока ждал посылку — получал свои первые летные навыки. Получив посылку с комплектующими и почувствовав себя немного посмелее (уже даже в ветер летал, правда невысоко, в пределах 10 метров) — решил что пора попробовать немного апгрейдить этот китайский квадр. Видимо поняв, что дело пахнет керосином — он от меня решил улететь. Был достаточно сильный ветер, я снял защиту с винтов (сильно парусит). После 5 минут лета (аккумулятора хватает на 10-15 минут лёта), порывом ветра его отнесло от меня достаточно далеко. Пока пытался разрулиться (его ещё и закрутило вдобавок) — его унесло в сторону и вверх. Принял решение ронять, стик газа в 0, посмотрел ещё раз — где в небе я его вижу и пошел в ту сторону — искать. Не нашел. Не помогли методики поиска, выработанные ранее (идешь к месту предполагаемого падения, газ чуть вверх, слушаешь — где в траве он жужжит). Короче, осталось мне на память несколько запасных винтов, пульт Р/У, корпус-защита винтов и коробка.
Делать нечего — надо строить свой собственный квадрокоптер.
Сначала, планы — чего я хочу от этого зверя? А хочу я следующего: это будет квадрик с видеокамерой, системой FPV, обязательно OSD (чтобы знать, где искать и куда лететь домой), и системой спасения от крашей. На «китаелёте» у меня один раз в воздухе отстрелило винт, и когда он падал — я ничего сделать не мог. Поэтому я обязательно приделаю систему выброса парашюта (на данный момент ещё не реализовано, как и ФПВ). Это план работ, мечты-мечты.
Теперь к реалиям.
К тому времени у меня был такой конструктор:
- аппатура Turnigy с приемником (http://www.parkflyer.ru/78465/product/8992)
- кабель симулятора для тренировки на компьютере (http://www.parkflyer.ru/78465/product/102826)
- полетный контроллер с встроенными датчиками и GPS модулем (http://www.parkflyer.ru/78465/product/512186)
- 5 бесколлекторных двигателей 750 KV (http://www.parkflyer.ru/78465/product/6247)
- 5 регуляторов оборотов 30А (http://www.parkflyer.ru/78465/product/102416)
- пропеллеры левого (http://www.parkflyer.ru/78465/product/984940) и правого вращения (http://www.parkflyer.ru/78465/product/984939)
- сигнал разряда батареи (http://www.parkflyer.ru/78465/product/403257)
- батарея 5А/ч для полета (http://www.parkflyer.ru/78465/product/101022)
- и батерея 2,6 А/ч в передатчик Р/У (http://www.parkflyer.ru/78465/product/7346)
- ну и конечно зарядник для них (http://www.parkflyer.ru/78465/product/5548)
Итого на 12,5 тысяч плюс пересылка. Н-да — недешевое хобби. Так что, потенциальный новичок — подумай ещё раз!
Немного комментариев к списку покупок:
- Аппаратуру взял с встроенным модулем передатчика и приемником в комплекте. Для старта — КМК самое минимально и достаточно. 9 каналов — чтобы «на вырост» На данный момент использую 4 канала, скоро буду задействовать пятый. Профи берут голую аппаратуру, приемник и передатчик используют другие.
- Думал, «а нафига мне зарядник — что я два проводка не воткну, вон источников питания на 12 вольт много». На самом деле многобаночные LiPo аккумуляторы так просто заряжать нельзя. Напряжение в какой-нибудь банке может быть меньше рекомендуемого, а в какой-то больше рекомендуемого. Короче, если не хотите пожара или скорой смерти аккумулятора, не скупитесь на заряднике.
- винтов надо брать МНОГО. Квадрокоптер — это не самолет, винты кушает — только в путь. Самолету чтобы летать — достаточно одного, а квадрику только чтобы полететь — четыре надо. Особенно, если пилот неопытен и квадрик не настроен (мой случай). Тогда будет вообще — один полет — минус один-два пропеллера. Я уже скоро буду ощущать острую нехватку винтов.
- двигатели и регуляторы надо брать тоже с запасом, хотя бы плюс один.
- регулятор выбирается мощностью чуть больше, чем максимальный ток на двигателе.
- полетный контроллер лучше брать самый новый из имеющихся. Я взял «старенький» (купился на GPS в комплекте), в результате поимел проблемы с старыми слабочувствительными датчиками. Именно для преодоления глюков барометра старого типа(альтиметр), его рекомендуют прикрывать тоненькой черной паралонкой (датчик глючит даже от солнечных лучей - новые баро этим не страдают). Приклеил кусочек черной паралонки за края над датчиком.
Теперь история моих метаний (новичкам читать обязательно):
При включении пульта возникает ошибка «Switch error». Решение — все тумблеры от себя и вниз, тогда нормально включится.
Батарею аккумулятора, заказанную мной можно случайно воткнуть неправильно, что приведет к переполюсовке - сгорит пульт. Для недопущения этой ситуации купил в радиомагазине балансировочный разъем для 2S. Теперь у меня зарядка проходит двумя проводами - силовой и балансирный на 3S, а питание аппаратуры через разъем формфактора 2S (в разъем заведен только плюс и минус, правый пин пустой).
Аппаратуру подключил шнурком к симулятору чтобы научиться вообще держать пульт в руках. Симулятор нашел Aerofly (естественно ворованный). Если вам претит пользоваться ворованным — купите его официально, или пользуйтесь бесплатным FMS (кстати, для FMS не нужен специальный кабель, всего лишь моноджек 3,5 на обоих концах). Чтобы подключиться к симулятору — достаём модуль передатчика из пульта, иначе ничего не выйдет! Возникает проблема с проводком между аппаратурой и модулем передатчика. Она решается убиранием антенны из пульта в модуль.
Далее — сама постройка квадрика:
Почитав over 500 страниц на разных форумах (реальная цифра) сначала хотел строить суперлёгкую и супердешевую раму на двух фанерках и штапиках. Но взяв в руки движок DT750 отказался от этой идеи (хотя наверное опять к ней вернусь, когда от текущей рамы добьюсь хороших результатов) — мощная штука, тяжеловато для штапика.
Купил текстолит, попался фольгированный с двух сторон. Обдирать фольгировку не стал - лень. Назовем это мыслями о усилении прочности. Напилил два квадратика — это будет верх и низ рамы. В «ЛеруаМерлен» купил квадратный профиль алюминий 12х12х1,2 (10х10 — нигде найти не могу - почему-то страшенный дефицит).
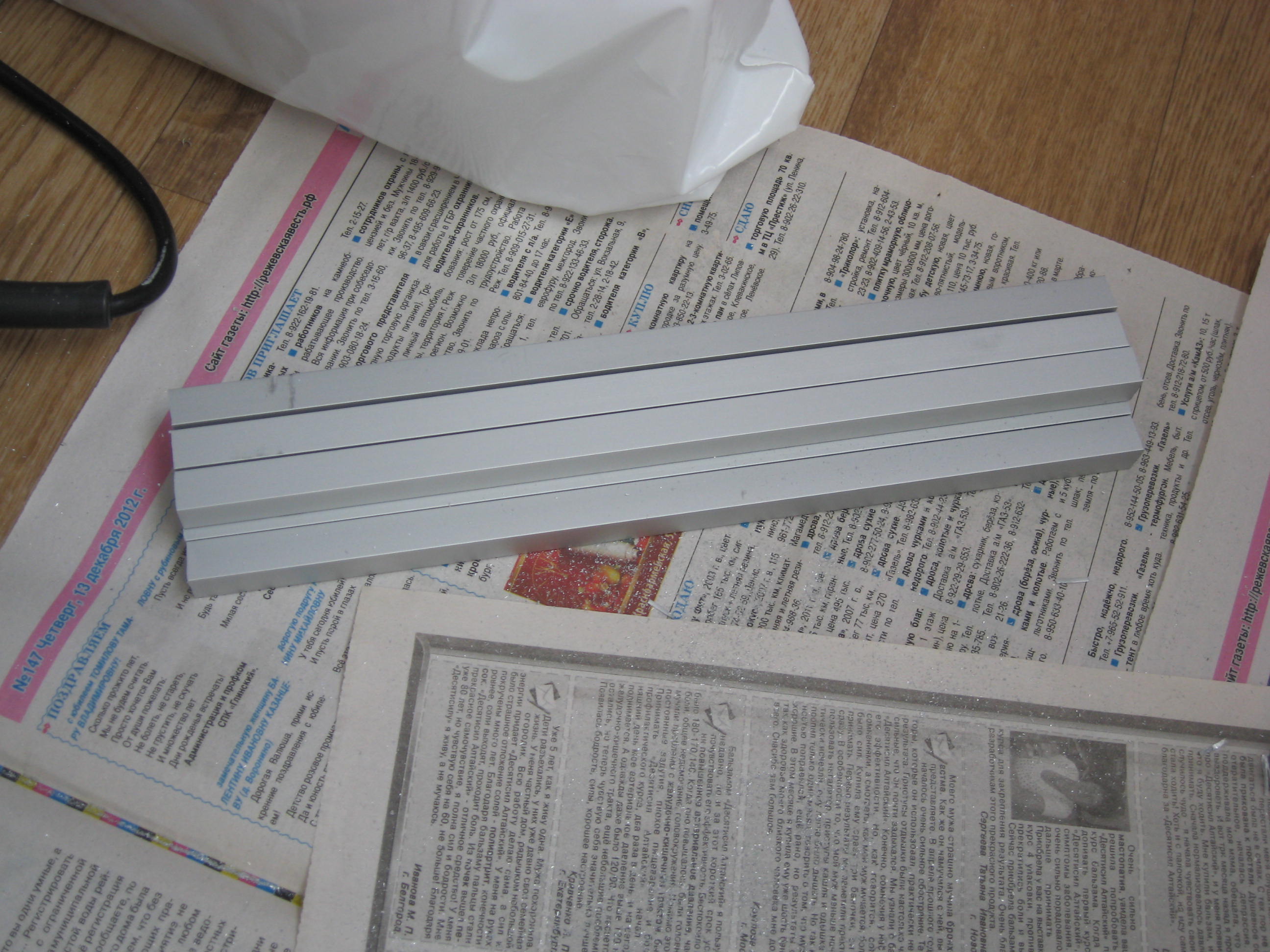
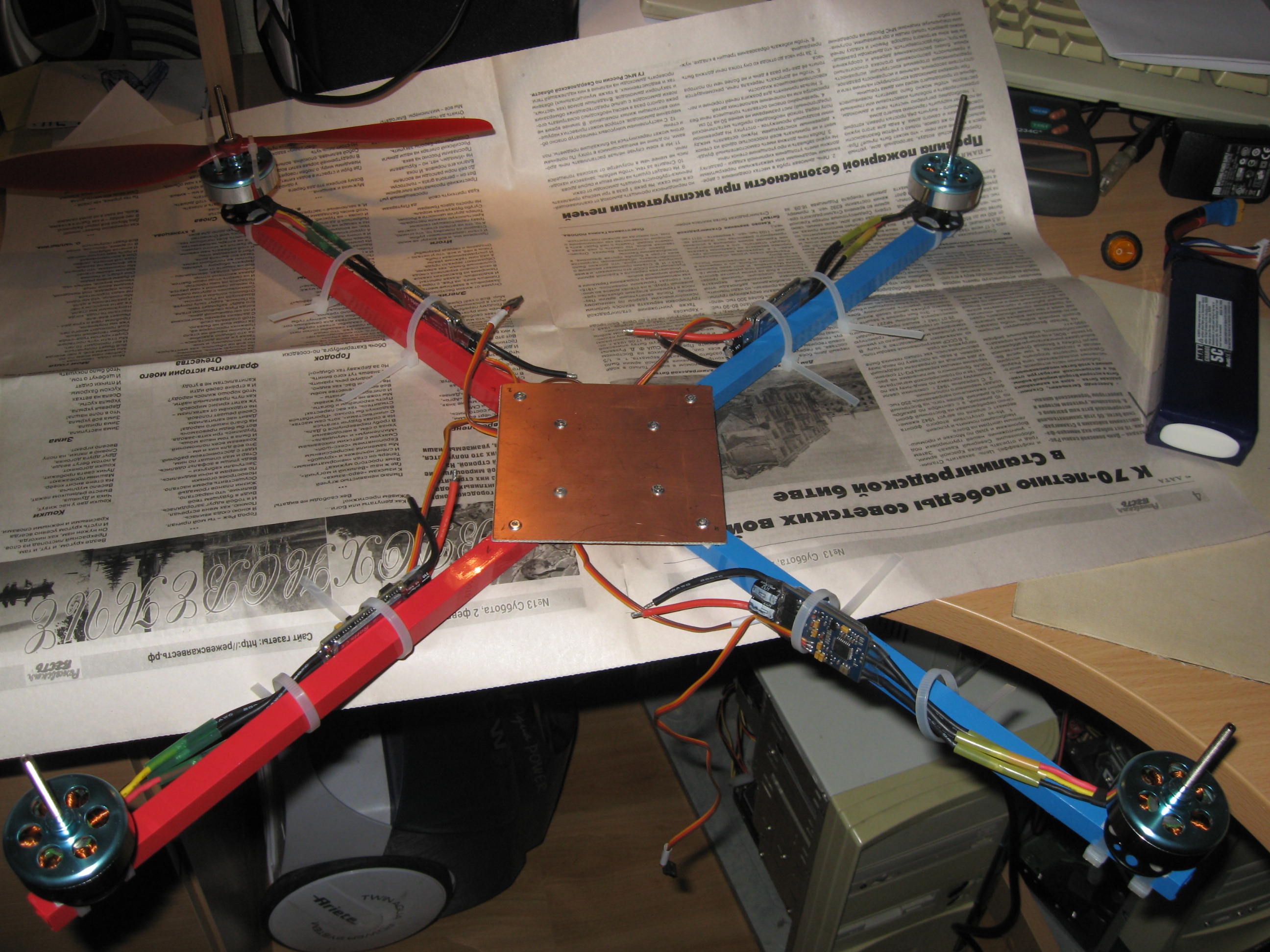
Напилил лучи. С одного конца луча просверлил по две сквозных дырки сверлом 3,2 мм. Из эстетических соображений проклеил цветным скотчем — 2 красным (задние лучи), 2 синим (передние).
На моторах выкрутил винты крепления оси на ножке, заменил винтами с резьбой м3. Поначалу приходилось подтягивать шестигранником, но постоянно раскручивалось. После замены на винты — не раскручивается (даже без фиксатора резьбы).

Наклеил маленькие кусочки 2-х стороннего тонкого скотча (шаманское действие для виброизоляции), посадил моторы на луч, используя стяжки.
Приклепал заклепками 3,2 лучи к одной пластине (вторую ставить пока рано). Заклёпочник — СИЛА! :)
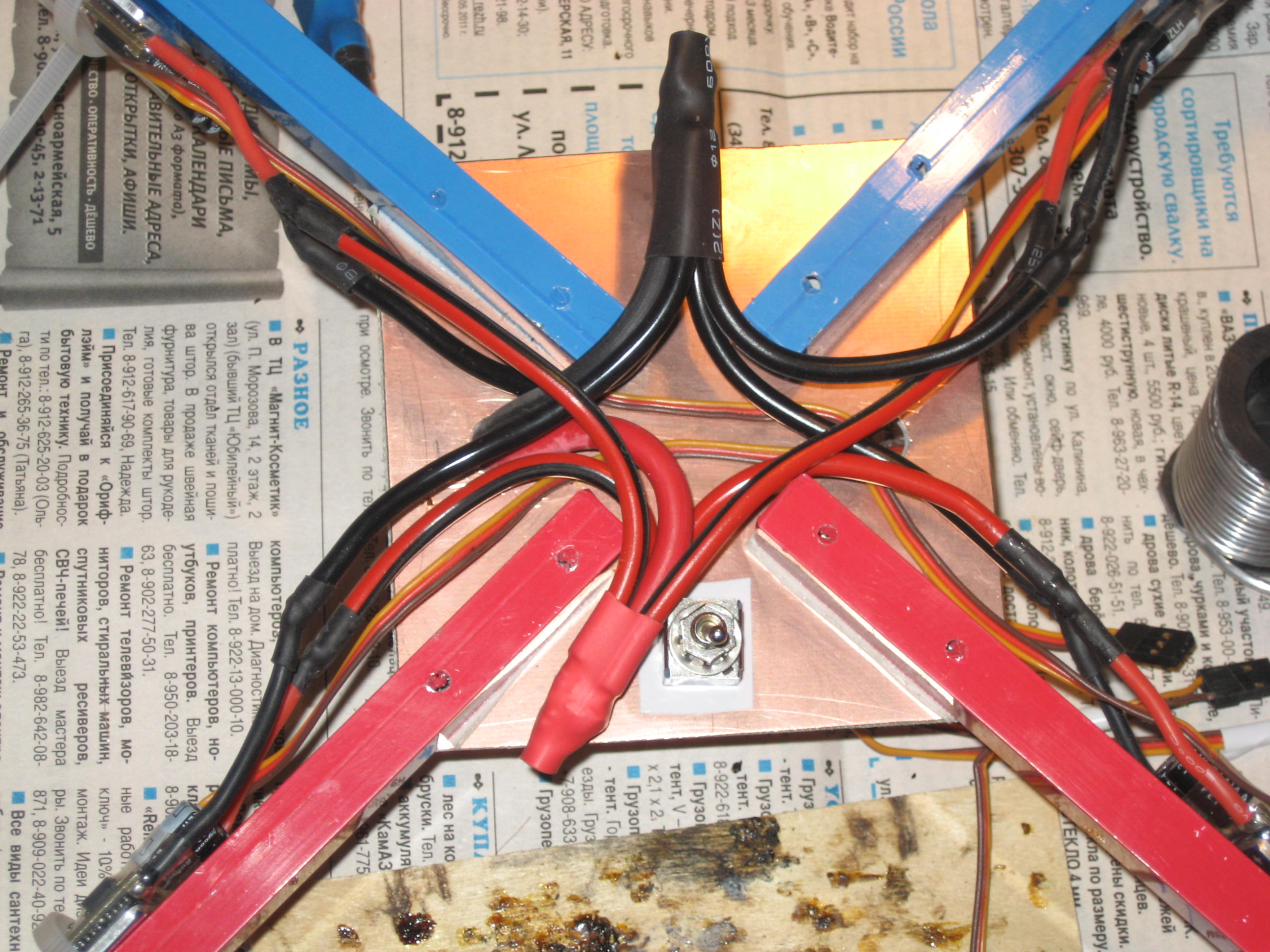
Сделал разводку по питанию. Все регуляторы сажаю на пайку, плюс к плюсу, минус к минусу к аккумулятору. Пришлось использовать дополнительный провод увеличенного сечения (шаманизм — только моё IMHO). Для безопасности сделал выключатель плюса. Попутно пришлось поменять все силовые разъемы на аккумуляторе, на зарядке, на коптер поставить (запаситесь заранее - чтобы не бегать как я, по модельным магазинам).
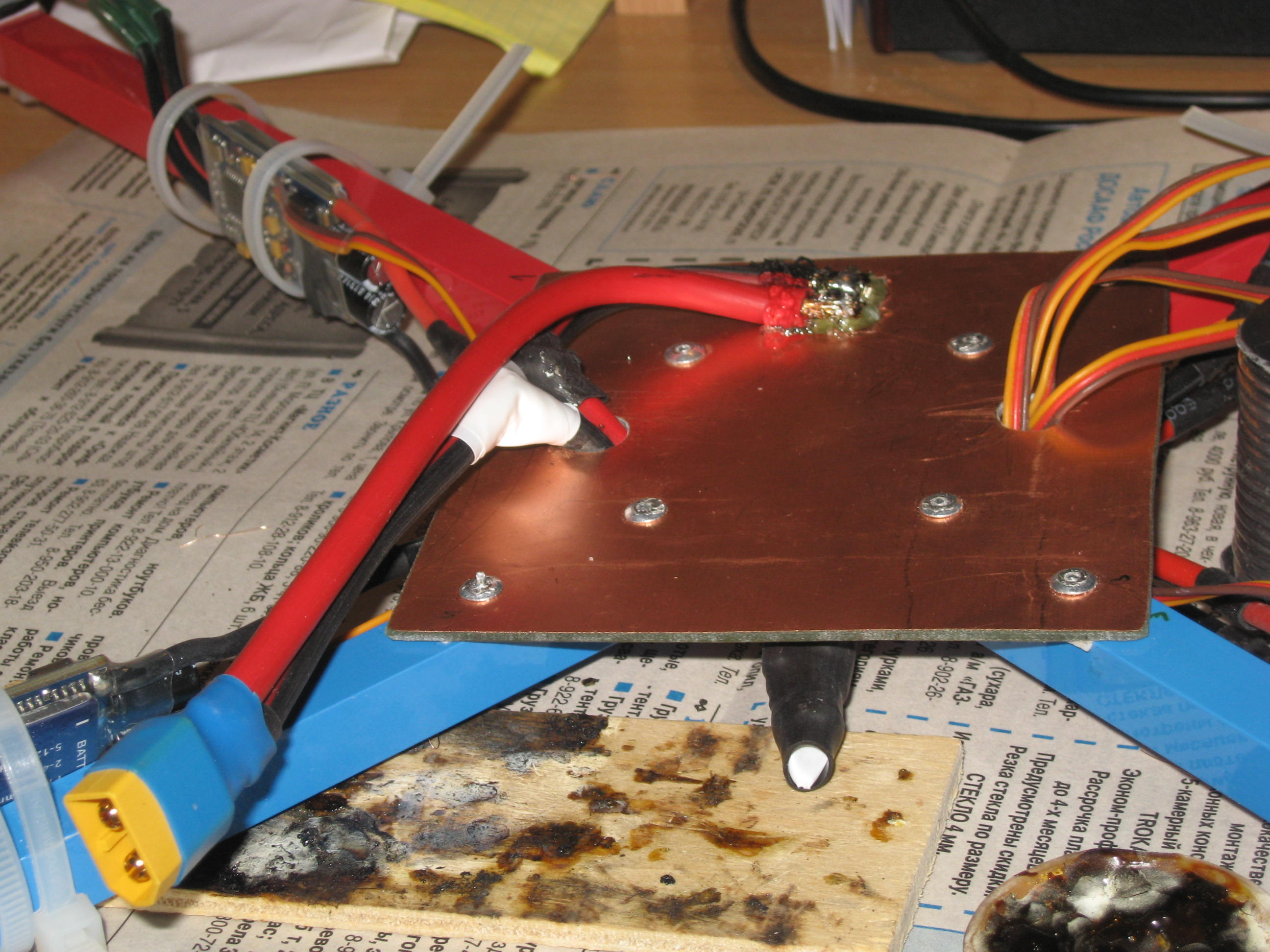
Припаял моторы к регуляторам — термоусадку сразу не усаживать! Возможно (даже скорее всего) придется потом менять направление вращения каких-нибудь моторов.
После того, как продуманны и насверлены все отверстия (для прокладки проводов, для крепления второго этажа, для крепления шасси и что там у вас ещё будет), после всего этого приклепываем вторую пластину из текстолита к лучам. Для виброизоляции (опять шаманизм) я наклеивал тот же тонкий 2-х сторонний скотч и приклепывал прямо сквозь него. Виброизоляция нужна для того, чтобы избежать помех на датчиках. Просто может получиться замкнутый круг - датчики ловят помеху в виде вибрации, пытаются её скомпенсировать, создавая тем самым дополнительную вибрацию. Для борьбы с вибрациями делают несколько вещей: балансировка моторов, балансировка винтов, виброразвязка.
Сделал балансировку моторов. На форумах вычитал 2 способа, понравился лазерно-оптический (опишу подробно). Для этого к регулятору цепляем приемник в 3 канал (газ). На луч около мотора на 2-х сторонний скотч клеим зеркало. В «третьей руке» зажимаем лазерную указку (позаботившись, чтобы светила постоянно), направляем на зеркало. При запуске мотора, отражение вибрирует, размываясь в линию. Берем стяжку, надеваем на колокол двигателя — смотрим какое пятно получается. Постепенно перемещая замок стяжки по кругу, находим положение в котором отражение наименее искажено. Отмечаем фломастером место для наклейки противовеса, снимаем стяжку. Я использовал армированный скотч для противовеса. Мне хватило по 2-3 слоя для того, чтобы отраженный зайчик практически не искажался. И так все 4 мотора.
Для перфектионизма нужно отбалансировать ещё и винты, но у меня их идет слишком большой расход (да ещё и балансировку к тому же не сделал - сделаю магнитную), поэтому пока не до балансировки винтов.
Винты на ось садил между металлических шайбочек на самоконтрящуюся гайку М4 (с пластиком внутри) с последующей фиксацией винта за мотор стяжками для борьбы с проворачиванием.

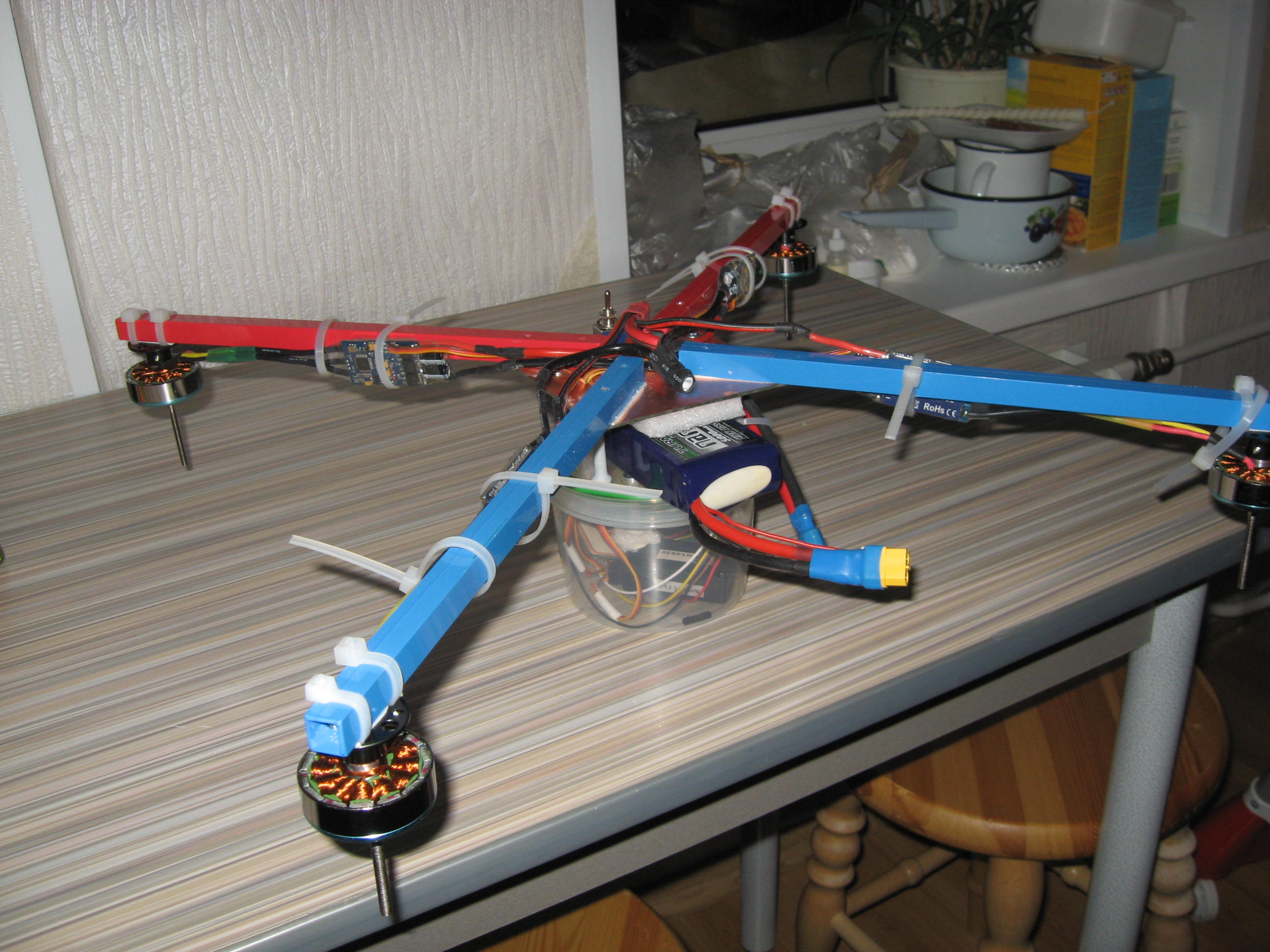
Я решил сделать «перевернутый» квадрик. Это когда винты будут толкающими, а не тянущими. И ЦТ сделать внизу, а не вверху — для лучшей стабильности. В дополнение к этому батарея над "мозгами" создает некую инертную массу - тем самым я надеюсь побороть высокочастотные вибрации. На фото - квадрик лежит кверх ногами. То есть собранный сэндвич (на фото - не хватает одной текстолитовой пластины) — это у меня нулевой этаж. Далее, минус первый этаж — батарея, минус второй этаж — мозги (вся электроника). Моторы соответственно смотрят валом не вверх, а вниз (висят на уровне минус первого этажа). Винты нужно ставить с учетом правильного вращения моторов для вашей рамы (не путаем левые и правые и ориентацию винтов).
Купил герметичную пластиковую банку в хозмаге для «мозгов» квадрика. Используя пластиковые дюбели в качестве втулок, прикрутил крышку банки к раме на длинных винтах м3. Длину пластиковых дюбелей подобрал так (отрезал лишнее), чтобы поместилась батарея между текстолитом и прикрученной пластиковой банкой.
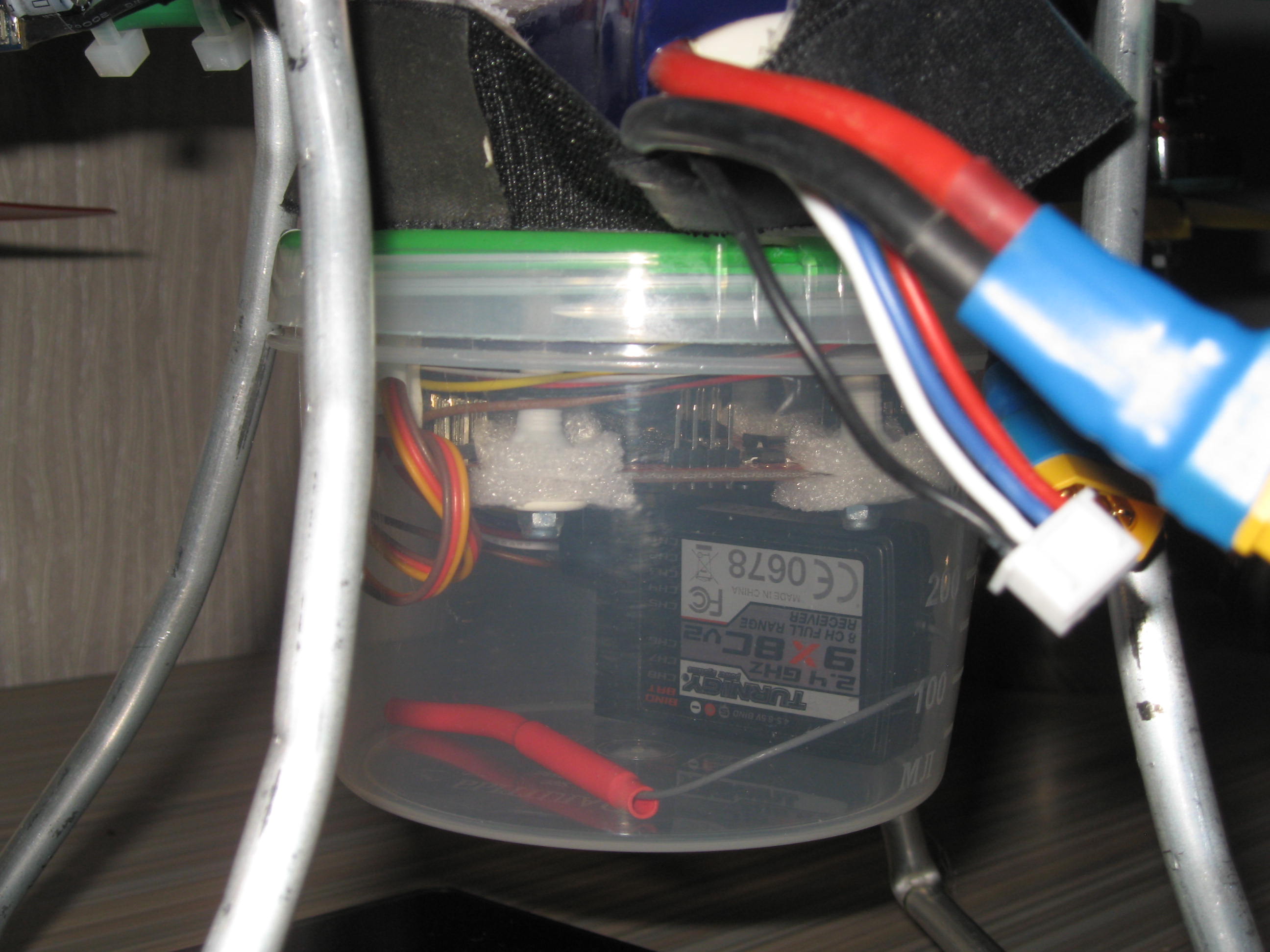
Внутри банки таким же способом закрепил плату полетного контроллера (для шаманской борьбы с вибрацией - тонкий слой паралона перед стойкой/дюбелем и после платы, перед пластиковой шайбой и самоконтрящейся гайкой). Нужно обратить внимание, где у платы верх, где низ, и где фронт (ищем стрелочку на плате — направление полёта). Просверлил отверстие для проводов от регуляторов, подложил пористый пластик (что-то типа поролона), чтобы не было открытой дырки. Передатчик и антенна (в будущем и модуль GPS) - пока никак не закреплены, и лежат себе на дне банки. Когда придумаю как закрепить — сделаю это. Перед подсоединением регуляторов рекомендуется из трёх убрать плюсовой провод из колодки. То есть питание платы и по цепочке приемника осуществляется от BECа одного регулятора. Итого - три колодки с контактами минус и сигнал, одна колодка - все три (минус, плюс, сигнал).

Шасси — пока открытый вопрос. Первый вариант погнулся при первом краше и при попытке выправить — сломался. Поэтому конструкцию шасси описывать не буду, так как неудачная. На текущий момент шасси - «табуреточка» :) из металлопластиковой трубы.
Настройка мозгов:
Теперь мозги — отдельная тема. Полетный контроллер к вам придёт скорее всего прошитый конфигурацией «квадро +». А мне нужен «квадро Х». Для начала вам надо определиться, какой прошивкой вы будуте прошивать ваш полетный контроллер. Существует большое количество прошивок, платных и бесплатных, умных и тупых, со стабилизацией и без. Чтобы было проще скажу про две. На основе Multiwii — это просто чтобы полетать. И на основе MegapirateNG — есть возможность летать по маршруту, заданному точками по GPS координатам. Оба проекта имеют полностью открытый код, можно править самому как хочешь, достаточно обладать навыками в программировании микроконтроллеров. Если таких навыков нет, то оптимальный вариант - взять прошивку от человека, занимающегося модернизацией прошивок. Тогда настройка прошивки будет сведена к раскомментированию кода с описанием конкретно вашей платы (приведены различные варианты). Прошивку выбирать вам самим — все равно любую прошивку нужно предварительно настроить.
Первоначально я взял прошивку MegapirateNG. При попытке взлета квадрик упорно пытался клюнуть на один из лучей и крутился против часовой стрелки. Почитав форумы - нашел решение - нужно калибровать датчики и перепрошивать регуляторы.
В поисках решения скачал прошивку базовую (более старая версия - типа демоверсии) от форумчанина с ником Mahowik. Как уверяет разработчик - это мегастабильные мозги.
Калибровка датчиков делается несколькими способами. Один способ - из программы, другой - стриками на пульте.
Так как у меня в итоге пока клон Multiwii - программа называется Multiwii Config (искать тут).
Прошивка регуляторов необходима для более быстрой реакции регулятора на команды управления. Если в самолетах можно подсоединить регулятор напрямую к приемнику, то некий тормоз при исполнении команд регулятором - вещь необходимая. Просто по радиоканалу могут идти помехи, и если их сразу исполнять, будет "колбасня". Так как у нас команды отдает полетный контроллер с "мегастабильными" мозгами - время реакции нужно уменьшать. Прочитать можно тут.
Вот так меняется поведение с прошитыми регуляторами (видео не моё)
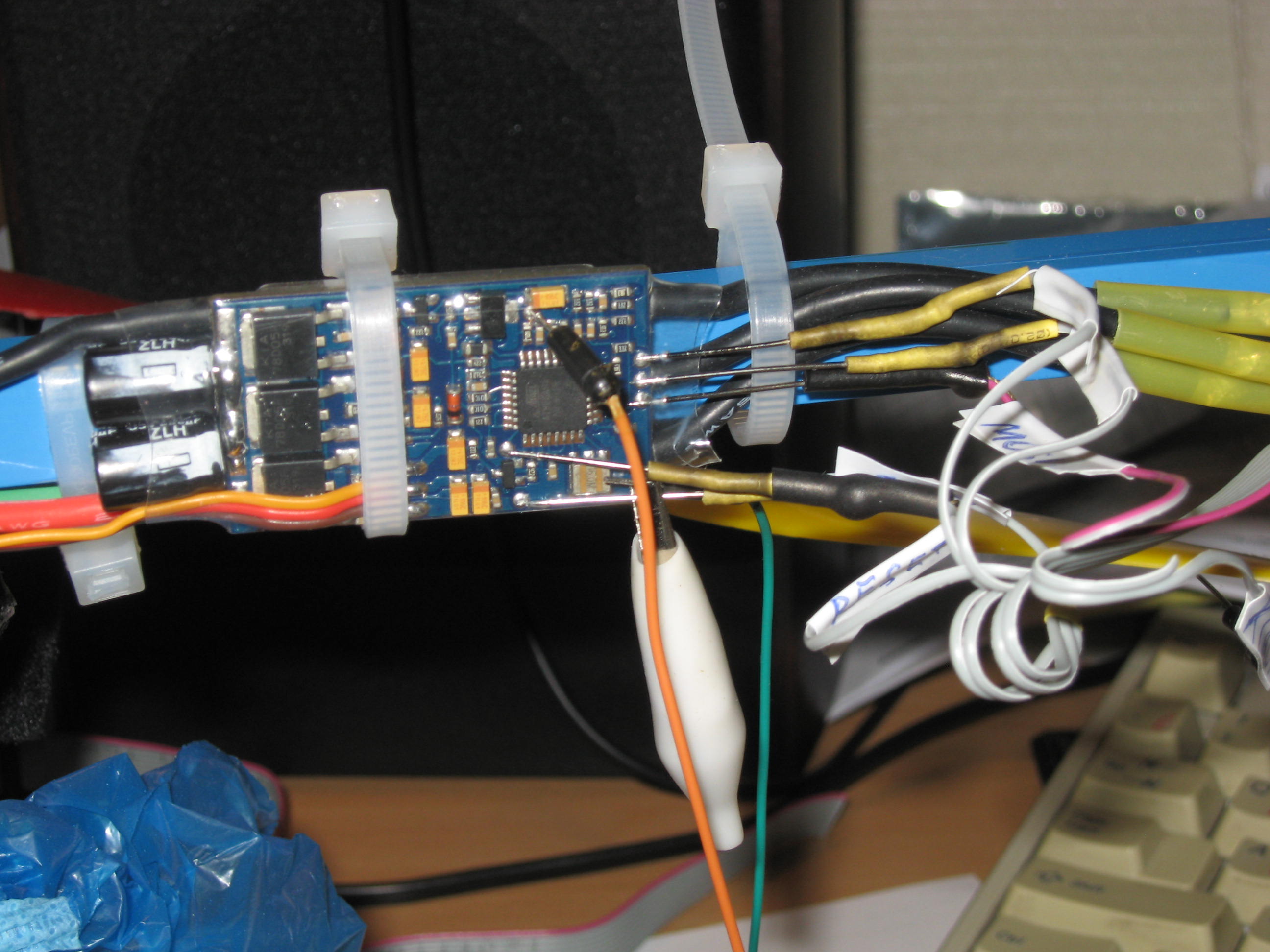
Прошивку и точки подключения искать тут. Так же рекомендую почитать вот этот дневник (требуется регистрация). Перепрошил ECS регуляторы. Для этого обрезал шлейф, идущий в комплекте с программатором USBaps (брал в радиомагазине, производства МастерКит, переплатил 400 руб, нужен был срочно), концы проводков зачистил на 5 мм, примотал ниткой к булавке (для швей, с шариком на конце - подкалывают ткань при примерке), сверху закрепил термоусадкой. Полученные контактные иголки втыкал прямо сквозь термоусадку в контактную площадку на регуляторе. Пришлось ещё дополнительно подать 5V (минус - на землю программатора, плюс - на контактную площадку регулятора). Шил программой ARVDUDE из командной строки. Когда наловчился - на перепрошивку одного регулятора уходило 10 минут вместе в расположением иголок на пинах. Прошил прямо не снимая с лучей. После «иглотерапии» регуляторам, моторы стали крутиться плавнее, без «иканий». Если очень постараться, можно квадр «поставить» на полу под 45 гр. и он так застынет (у меня почти удалось повторить подсмотренное ранее видео).
Итого -после изучения тем: прошивка регуляторов (SimonK), настройка ПИД (до сих пор не понимаю), калибровка стиков пульта, субтримы на пульте, калибровка акселерометра и компаса с помощью стиков на пульте перед взлетом — мой квадрик ВЗЛЕТЕЛ!!!!!!!! Погода была достаточно ветренная - 2 м/с, порывы до 5 м/с - мне показалось не айс для облета. Как закономерный результат - я в том полете крэшанулся об металлическую крышу гаража, пришлось править лучи - закрутило винтом 2 луча.
Прошивка Мультивии показалась как-то понятнее мне, и более конфигурируемой что ли. Но я всё равно хочу поставить себе мегапирата — мне нужен коптер «приколоченный» к небу!
Прошу прощения, видео первого полета не будет. Оператора не было, «видеокепку» сделать не успел, видеорегистратор отключился сам собой почему-то (или я тупо забыл его на запись поставить).
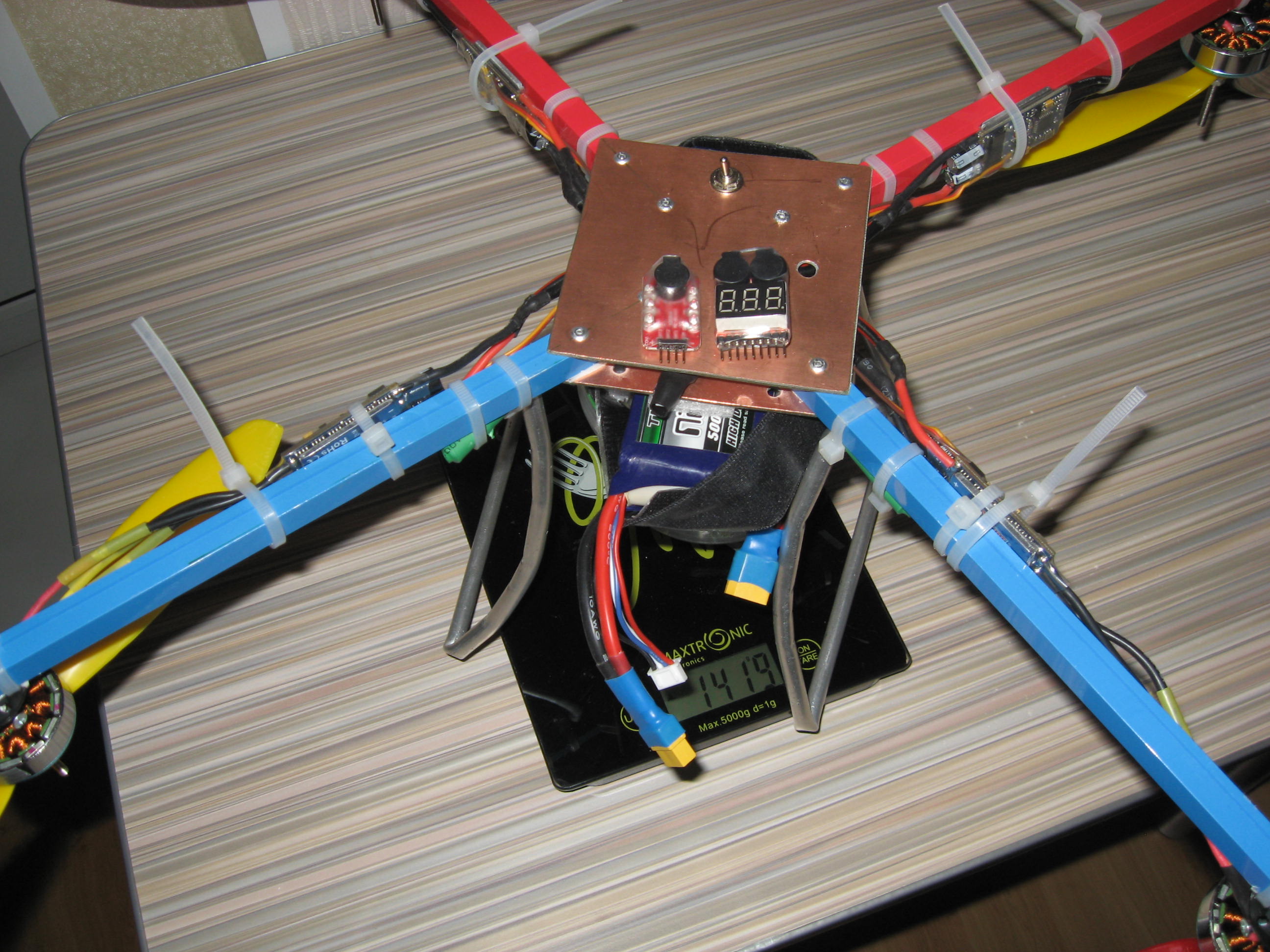
Вот так он выглядит на данный момент:
Такие же огни, только белого холодного цвета установил на передние лучи. Квадрик в хмурую погоду читается в небе на отлично. Ночью - вообще феерия!
Поставил на плату прошивку мегапират, о чем сделал отдельный дневник, ибо получилось много, зато пошагово.
Сделал видеокепку. Конструкция получилась хреновая, но мне удалось снять видео полета (наконец-то!). Кепку нужно переделывать, пока не придумал как. Видеокепка выглядит вот так (патриотизьм детектед)

Вот долгожданное многими видео полета в хмурую погоду с ветром 4-6 м/сек.
Весело так Ютуб свой кодек применил. Смотрим, как летает дата/время в углу и смеёмся весь ролик. Сначала над надписями, потом над моим пилотажем, потом над моими посадками.
В начале кино я сетую на проблемы с армингом - так вот проблемы прогрессируют, мой полётный контроллер вообще перестал армиться. Так что или я починю как-нибудь этот, или закажу/дождусь другого. Если буду заказывать новый, то это будет Криус АллИнОн. А GPS мне пригодится та, которая есть. Это я всё пишу к тому, что другого видео пока не будет.
Вроде починил платку. В итоге по совету выкинул один стабилизатор на 5V, закоротил два контакта. В идеале надо поставить туда диод, но пока не могу найти подходящий с низким сопротивлением. Вчера летал в темноте. Квадр светится как новогодняя ёлка (вот так и рождаются слухи про НЛО). Ветром квадрик унесло далеко, сработала пищалка по питанию, при попытке сесть сломал два винта. Больше ночью летать не буду - не видно где земля, садишься вслепую. Видео вышло не в кадре - смотреть нечего.
Оказалось, что проблемы с армингом были вызваны кривой прошивкой - и зря я плату паяльником тыкал, и зря я стабилизатор на 5V убрал. Ладно, стаб потом назад поставлю - когда выйдет путёвая прошивка. А сейчас видео ночного полёта (а говорил ночью летать не буду). Температура +3 градуса, идет дождь, оператор - дочь 6 лет. Испытывал винты - не понравились. Во-первых - качество не на высоте, нет переходников на другие валы - растачивай сам, облой попадается. Во-вторых - квадрик стал каким-то ленивым. То ли ему крутить их тяжело, то ли они не слоуфлай. Видео снялось какое-то мутное, видать запотел объектив. Ютуб нормально исправить ситуацию с запотевшим (или мокрым) объективом не смог - получилось не очень.
Квадрик от меня улетел - уже скоро месяц, как. Предполагаемое место падения уклеено объявлениями о розыске с обещанной наградой. На самом квадрике приклеен на скотч мой номер мобильника. Предполагаемая причина улета - снос крыши у датчика компаса. Полет проходил без датчика GPS (первая ошибка), переключился в Simple Mode - хотел снять на камеру панораму берега (вторая ошибка), обнаружил что оси квадра не совпадают с моими командами. Пока переключался на обычный, ручной режим - ветром его унесло за деревья. При потере визуального контакта надо было его сразу уронить - пытался вырулить (третья ошибка). Ну и не нашел конечно. Вопрос "какого хрена не прицепил беспроводной звонок из хозмага на коптер" - остался без ответа (роковая ошибка). Ущерб от потери - около 7,5 тысяч. Может весной оттает, может школьники найдут - остается только объявы клеить периодически, взамен сорванных ветром/людьми.
Модуль FRSKY установил на новый коптер, который собрал на днях (запчасти давно подкапливал). Усы приемника вывел наружу, закрепил на лучах под 45 градусов вниз с помощью скотча. Учитывая диаграмму направленности этих антенн - немного неправильно, буду переделывать. На дальность ещё не тестировал.
Все нижеприведенные планы по мере из реализации будут помещены сюда в виде ссылок на другие дневники. (это я к тому, что это живой дневник, а не застывшее изваяние)
В планах на ближайшее будущее:
Когда медленнопочтароссии привезет мне мою посылку, прикрутить камеру к квадрику. Дождаться заказанного и установить комплект FPV + OSD. Настроить модуль GPS. Сделать «видеошлем» из матрицы 7 дюймов, лыжных очков и френельки. Сделать систему спасения падающего коптера - на парашюте (конструктив придуман, но пока только в голове), купить и поставить комплект фрискай (приемник, передатчик) для увеличенной дальности, пошаманить с антеннами/бустерами.
А там глядишь и до самолетов доберусь (на Бикслер поглядываю)....
Надеюсь, не утомил. Статья первая, если что не так - простите пожалуйста. Спасибо за внимание, принимаю помидоры в неограниченном количестве, начинаю тарить в ящики и делать заготовки на зиму. ;-)
Меня частенько спрашивают как настроить собранный коптер. Привожу краткую инструкцию по настройке коптера перед первым полетом:
1. Калибруем аппаратуру. Выходные значения по движениям стиков должно быть в идеале 1000 минимум, 1500 середина, 2000 максимум. Идеала не достичь, но стремиться надо. Особенно важна середина. Используем аппаратную калибровку стиков аппы, субтримы, конечные точки, что-нибудь ещё - тримы не трогаем. Тримы нам ещё понадобятся в полете.
2. Калибруем радио в мишн планнере.
3. Калибруем компас
4. Калибруем акселерометры.
5. Калибруем регуляторы через контроллер. Для этого выключаем коптер, на аппе даем газу на полную, включаем коптер. Ждем пока проморгается, опять выключаем коптер (аппу не трогаем - максимум). Опять включаем коптер. Контроллер должен встать в особый режим (поочередное моргание трех основных светиков). На аппе убираем газ в минимум. Регули должны пропищать. На всякий случай выключаем борт. Всё - регули откалиброваны "как один" через полетный контроллер.
6. Ставим коптер строго горизонтально (лучше по уровню), заходим в МП в терминал, пишем setup, потом level
7. Устанавливаем пропеллеры, если не стояли, заходим в МП в терминал, пишем setup, потом compassmot. Придерживая коптер и БОЯСЬ ПРОПЕЛЛЕРОВ добавляем оборотов - раскручиваем на максимум моторы. Раскручиваем, добавляя газ не рывком, а плавно. Начали раскручивать, считаем до 5 (добавляя газ), газ в максимум, считаем до 5, газ в минимум. В терминале жмем энтер. Тем самым внесли в коптер поправку влияния наводок на компас от проводов в зависимости от оборотов.
8. Автотриммирование. На улице, в безветренную погоду (это важно) делаем автотриммирование. Для этого ставим стики в комбинацию арминга (газ минимум, YAW в максимум), но держим долго, наблюдая за светиками. Сначала контроллер заармится - держим дальше стики, потом войдет в режим автотриммирования. Это где-то 20-30 секунд ожидания. В этом режиме взлетаем на метр-полтора (чтобы не мешали завихрения от земли) и работая стиками пытаемся удержать коптер на месте. Поборовшись так минуту, сажаем его, делаем дизарм, выключаем борт. Теперь показания акселерометров и ваша реакция стиками на них - сохранена.
Основная настройка закончена. Удачных полетов!
!!! P.S. !!!!
Шлем FPV доделал. Видеосистема пойдет на вновь собранный коптер, заточенный для ФПВ съемок окрестностей. Систему спасения буду делать туда же. Данный дневник считаю законченным, всвязи с утерей этого коптера.
При наличии вопросов можете попробовать стукнуться в почту 5timur5(злое животное)мэйлТочкаРу. Если не буду сильно занят - отвечу обязательно. Комменты здесь будут увидены мною и будут даны ответы на вопросы только при наличии вашей удачи.
Всего хорошего!
26 февраля 2014 года
UPD: коптер нашелся (улетел на территорию завода), был снова облётан, учавствовал в поисках другой "потеряшки", после последнего краша ждет моего внимания для переделки. Буду из него делать вариант для акробатики - уж очень крашеустойчивая рама в итоге вышла (лучи из металлопластиковых труб - выпрямляются руками, моторы держатся на пластиковых стяжках, при краше мотор просто слетает с "насеста". 5 минут - и снова в полет). Но это уже тема для отдельного дневника.
апрель 2014года













1) Левый передний мотор крутится по часовой стрелке - винт правого вращения (в моем заказе - красный)
2) Правый передний мотор крутится против часовой стрелки - винт левого вращения (в моем заказе - желтый)
3) Левый задний мотор крутится против часовой стрелки - винт левого вращения (в моем заказе - желтый)
4) Правый задний мотор крутится по часовой стрелке - винт правого вращения (в моем заказе - красный)
Учитывайте, что у меня "перевернутая" конфигурация квадрика. То есть винты работают как пушеры. Если вы сделаете квадрик винтами вверх - значит лево и право поменяются местами. Всмысле что схема вращения моторов остается та же (только моторы уже смотрят осями вверх, соответственно они как бы сменили направление вращения относительно моего). И винты соответственно тоже (смотрим в пунктах 1-4 направление вращения двигателя, а пропеллеры - меняем правый на левый).
надеюсь не запутал ))))
P.S. Поставил прошивку мегапират, восстановил квадрик после крэша. Завтра-послезавтра облетаю, сделаю видео. Статья будет дополнена частью про пирата и залью видео полета (заранее прошу сделать скидку - пилот из меня никакой)
Я тоже думал сгородить подобное но никак не отойду от опоры на крыло =)
Только вместо профиля я думал использовать швейлер.
-У швейлера жесткость хуже чем у профиля но лучше чем у перфорированого профиля =)
Вес перфорированого профиля и швейлера будет примерно одинаков.
-Перфорированый профиль в процессе перфорации может повести.
-Крепить лучи из швейлера клепками или винтами проще и легче(по весу).
-Габаритные размеры швейлера те же, продается там же(Леруа Мерлен) =)
Клёпки мне кажутся гораздо лучше винтов. Всё равно в поле менять луч не будешь, а дома аккуратно высверливается, и новая клёпка отлично сажается в старое отверстие. По весу - выигрыш однозначно.
Да и неспроста вся "взрослая" авиация на клёпках летает (правда там несколько другие клёпки и не на несущих деталях).
Когда кончится профиль алюминиевый 12х12 (крэши, ага - сейчас дрова с поля собираю опять в квадр) - попробую использовать сантехнический металлопластик ))) Его рукой можно выправить как надо. Только надо следить за жесткостью получившейся рамы и вертикальностью моторов...
Молодец держи + от опытного, про Пиды лови ссылочку, вроде все понятно
http://multicopterwiki.ru/index.php/Теория_настройки_ПИД_и_руководство_по_конфигурированию_мультикоптеров
И тут
http://multicopterwiki.ru/index.php/KK2.0_LCD#.D0.9D.D0.B0.D1.81.D1.82.D1.80.D0.BE.D0.B9.D0.BA.D0.B0_PID
Отверстия в профиле сверлить не буду. Когда буду собирать новый - попробую штапики в качестве лучей ))) Но на новый квадр покафинансов нету, мне бы покато что напланировал - воплотить. Жду с кЕтая камеру для борта, и на днях наверное закажу видеопередатчик.
Сделал видеокепку - будет видео полета через неделю. Если кто-нибудь ещё заглянет сюда, а то уже уползает статья из ленты в небытие )))
по поводу пидов и тд(вопрос в конце) я так и не смог побороть мультивий очень рекомендую ардупилота посмотреть, у меня он летит без подстроек отлично и выйдит прошивка с дня на день новая там пиды настраиваются автоматом)))
Добро пожаловать в наши ряды!
Я уже планировал вернуться на ардукоптер (точнее на мегапират), я это сделаю обязательно.
По-поводу банки - дык не герметичная она сейчас! В неё входят провода через отверстие, достаточное по диаметру, чтобы проходила фишка от регулятора. А это где-то сантиметр, при самом пучке проводов - около 5 мм. Остальное я проложил пористым материалом типа поролона. Думаю, барометр работать должен нормально.
Разобрался, почему крутило по рудеру - после первого/последнего краша, один луч винтом. Соответственно проп направлен не вниз, а немного в сторону - оттого и крутит.
Скажу одно - мультивий - для тру пилотажников (с железными яйками), а ардукоптер - для начинающих (как я) или для тех, кому лень или некогда стики дергать.