Люди, пытавшиеся создать собственный пан-тилт для поворота-наклона камеры, наверняка сталкивались с тем, что хода стандартных сервомашинок, у которых ход от крайнего и до крайнего положения составляет, как правило, от 60 до 90 градусов, катастрофически не хватает. Хочется 180 градусов, а лучше так и все 360. Об этом и пойдет речь в этой записи. Тема конечно не нова, но пусть будет. Сильно не минусуйте, если что.
Все началось с того, что приобрел я камеру с пан-тилтом вот такую,

но подлые китайцы обманули и ход сервомашинок в нем оказался ну ни разу не 180 градусов. Покупать еще и сервомашинки сильно не хотелось.
Все началось с того, что приобрел я камеру с пан-тилтом вот такую,

но подлые китайцы обманули и ход сервомашинок в нем оказался ну ни разу не 180 градусов. Покупать еще и сервомашинки сильно не хотелось.
Для начала стоит оговориться, что в природе конечно же существуют уже готовые решения. Можно приобрести сервомашинку, у которой ход по заявлению производителя составляет 180 градусов. Еще есть специальное устройство, как правило называемое "серво-стретчер" (servo stetcher), которое включается между сервомашинкой и аппаратурой управления и увеличивает ее ход. Что-то типа такого:

Первый вариант простейший, но жабу никто не отменял. Второй вариант тоже не сильно дешевый, да и как оказалось практически не решает проблему, ход сервомашинок из вышеупомянутого пан-тилта увеличился в лучше случае градусов на 20, то есть на 10 градусов в каждую сторону.
Тем не менее, механически ход сервомашинки составлял градусов 160 - как минимум. Было принято волевое решение - вскрывать и оперировать.
Немного теории. Попытаюсь объяснить простыми словами, чтобы смог понять любой.
В сервомашинках угол поворота определяется при помощи потенциометра, который представляет из себя обычный переменный резистор, включенный соответствующим образом и соединенный с последней ведомой шестерней редуктора, той, которая переходит в ось, на которую крепится качалка. Выглядит он приблизительно так.
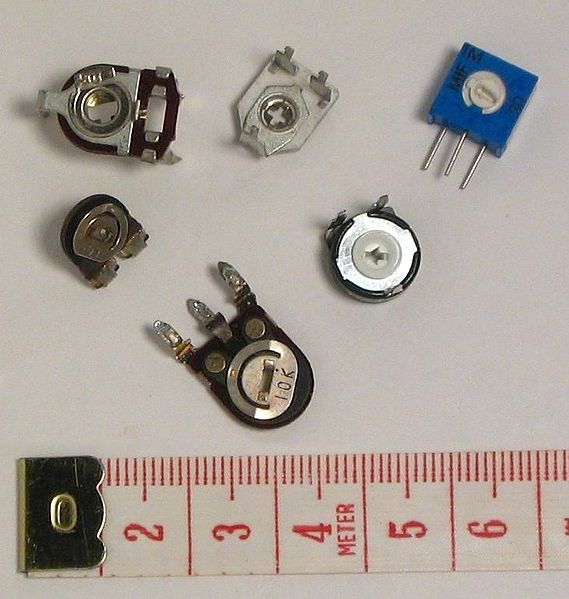
Ход этого резистора от минимального до максимального положения составляет, в зависимости от конкретного экземляра, от 150 до 170 градусов. Некоторые подвиды вращаются на угол до 270 градусов. Именно этот резистор и ограничивает механически максимальный угол поворота сервопривода. На многих сервомашинках так же используется стопор в виде выступа, в который упирается шестерня в крайних положениях, это решение позволяет не повредить резистор, если вы все же умудритесь раскачать сервомашинку до таких углов поворота.
Логика сервомашинки определяет угол поворота по величине напряжения, снимаемого потенциометром. Предположим, что на потенциометр (на крайние выводы) мы подаем +5В, при среднем положении, напряжение на подвижном контакте (средний вывод) потенциометра будет составлять +2.5В, при этом номинал сопротивления потенциометра значения фактически не имеет. Соотвественно в крайних положениях поворота сервопривода напряжение будет стремиться либо к 0, либо к +5В, но по факту там крайних значений не получается, сколько в действительности не замерял, да и не суть важно.
Чтобы увеличить угол поворота сервомашинки, нужно увеличить номинальное сопротивление потенциометра. Путем нехитрых математических изысканий получаем следующую логическую цепочку: механический ход составляет 160 градусов, ход при подключении аппаратуры 80 градусов, чтобы обмануть сервомашинку, нам надо увеличить номинал сопротивления потенциометра приблизительно в два раза. Т.е. на каждое плечо потенциометра необходимо добавить половину номинала.
Для гнусных опытов и отработки технологии решил использовать дешевую аналоговую сервомашинку. Вскрытие показало, что номинал сопротивления составляет 4.8КОм, замеряется между двумя крайними выводами, со среднего вывода снимается сигнальное напряжение. Делим пополам, получаем 2.4КОм. Ищем в закромах или покупаем резисторы соответствующего номинала и минимально возможного размера. Хотя надо заметить, что я в итоге установил резисторы номиналом 3.2КОм, чтобы раскачать сервомашинку на максимальный ход, так что лучше брать резисторы с запасом, в крайнем случае расходы можно ограничить в настройках аппаратуры, ну если она это у вас умеет конечно. Можно и SMD использовать при желании. Для рассчета цветовой маркировки резисторов используем какой-нибудь онлайн калькулятор, гугл в помощь.
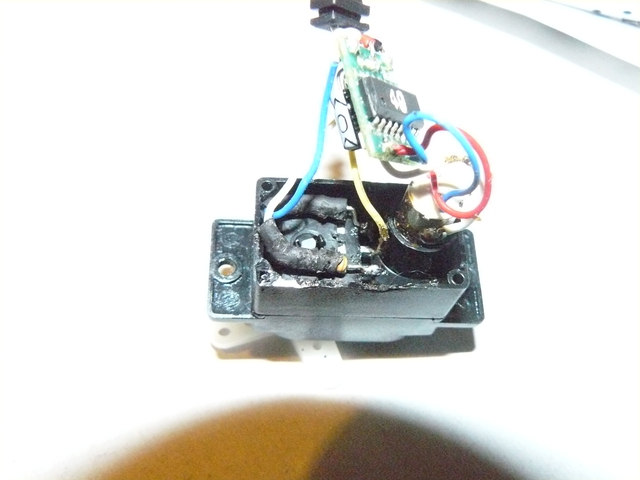
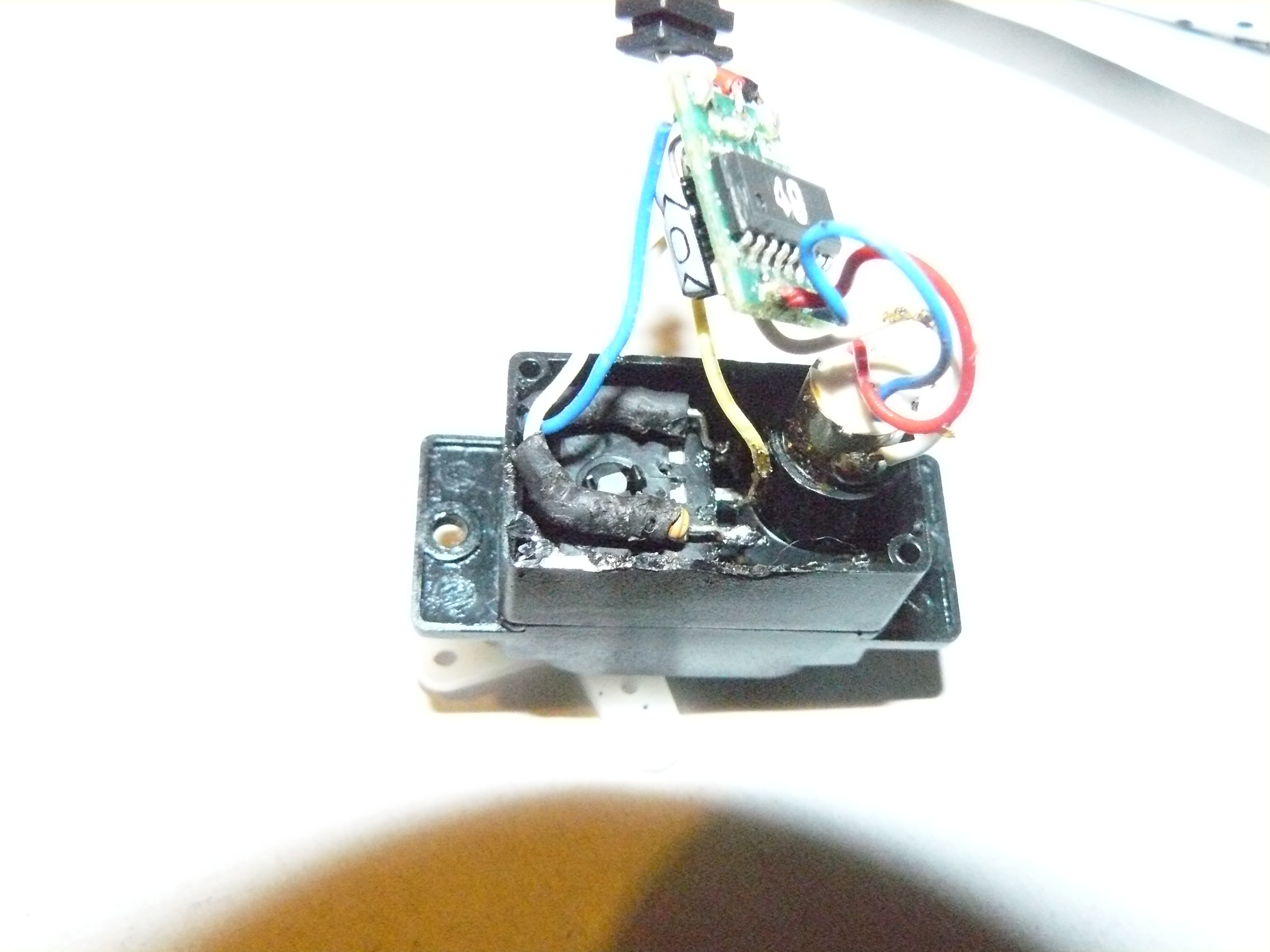
Запоминаем какой провод куда припаян на потенциометре, отпаиваем крайние провода, средний провод не трогаем. Припаиваем к крайним выводам резисторы, к резисторам провода, изолируем, собираем сервомашинку, включаем и радуемся. Вот фото моего Франкенштейна, корпус немного поджарился, но не критично)
 Видео в работе.
Видео в работе.
Сервомашинки в вышеупомянутом пантилте пережили подобную операцию положительно.
На этом все.
Спасибо за внимание!
Мои прошлые записи:
- Отдельностоящий (выносной) модуль РУ для FPV.

Первый вариант простейший, но жабу никто не отменял. Второй вариант тоже не сильно дешевый, да и как оказалось практически не решает проблему, ход сервомашинок из вышеупомянутого пан-тилта увеличился в лучше случае градусов на 20, то есть на 10 градусов в каждую сторону.
Тем не менее, механически ход сервомашинки составлял градусов 160 - как минимум. Было принято волевое решение - вскрывать и оперировать.
Немного теории. Попытаюсь объяснить простыми словами, чтобы смог понять любой.
В сервомашинках угол поворота определяется при помощи потенциометра, который представляет из себя обычный переменный резистор, включенный соответствующим образом и соединенный с последней ведомой шестерней редуктора, той, которая переходит в ось, на которую крепится качалка. Выглядит он приблизительно так.

Ход этого резистора от минимального до максимального положения составляет, в зависимости от конкретного экземляра, от 150 до 170 градусов. Некоторые подвиды вращаются на угол до 270 градусов. Именно этот резистор и ограничивает механически максимальный угол поворота сервопривода. На многих сервомашинках так же используется стопор в виде выступа, в который упирается шестерня в крайних положениях, это решение позволяет не повредить резистор, если вы все же умудритесь раскачать сервомашинку до таких углов поворота.
Логика сервомашинки определяет угол поворота по величине напряжения, снимаемого потенциометром. Предположим, что на потенциометр (на крайние выводы) мы подаем +5В, при среднем положении, напряжение на подвижном контакте (средний вывод) потенциометра будет составлять +2.5В, при этом номинал сопротивления потенциометра значения фактически не имеет. Соотвественно в крайних положениях поворота сервопривода напряжение будет стремиться либо к 0, либо к +5В, но по факту там крайних значений не получается, сколько в действительности не замерял, да и не суть важно.
Чтобы увеличить угол поворота сервомашинки, нужно увеличить номинальное сопротивление потенциометра. Путем нехитрых математических изысканий получаем следующую логическую цепочку: механический ход составляет 160 градусов, ход при подключении аппаратуры 80 градусов, чтобы обмануть сервомашинку, нам надо увеличить номинал сопротивления потенциометра приблизительно в два раза. Т.е. на каждое плечо потенциометра необходимо добавить половину номинала.
Для гнусных опытов и отработки технологии решил использовать дешевую аналоговую сервомашинку. Вскрытие показало, что номинал сопротивления составляет 4.8КОм, замеряется между двумя крайними выводами, со среднего вывода снимается сигнальное напряжение. Делим пополам, получаем 2.4КОм. Ищем в закромах или покупаем резисторы соответствующего номинала и минимально возможного размера. Хотя надо заметить, что я в итоге установил резисторы номиналом 3.2КОм, чтобы раскачать сервомашинку на максимальный ход, так что лучше брать резисторы с запасом, в крайнем случае расходы можно ограничить в настройках аппаратуры, ну если она это у вас умеет конечно. Можно и SMD использовать при желании. Для рассчета цветовой маркировки резисторов используем какой-нибудь онлайн калькулятор, гугл в помощь.
Запоминаем какой провод куда припаян на потенциометре, отпаиваем крайние провода, средний провод не трогаем. Припаиваем к крайним выводам резисторы, к резисторам провода, изолируем, собираем сервомашинку, включаем и радуемся. Вот фото моего Франкенштейна, корпус немного поджарился, но не критично)
 Видео в работе.
Видео в работе.Сервомашинки в вышеупомянутом пантилте пережили подобную операцию положительно.
На этом все.
Спасибо за внимание!
Мои прошлые записи:
- Отдельностоящий (выносной) модуль РУ для FPV.













Два, на каждое плечо потенциометра по одному.
Тут вообще речь не идёт о каких бы то ни было подтягивающих резисторах.
Вся эта тема - это банально обман сервомашинки, потенциометр на каждый градус поворота отдает большее либо меньшее напряжение (в зависимости от направления поворота), чем отдавал бы в случае, если бы я не впаял туда эти резисторы. В итоге ход в обе стороны сервомашинки увеличивается пропорционально добавленному сопротивлению на каждое плечо. Если добавить на плечи потенциометра не симметричные сопротивления, то сервомашинку перекосит, и в сторону с большим сопротивлением расход будет больше, а в сторону с меньшим сопротивлением - меньше. Ко всему съедет центральное положение. Но это уже нюансы.
Да, можно заменить потенциометр на аналогичный, в том же корпусе, большего номинала, но где его взять? Задачка покупки такого потенциометра не тривиальная.
А тот способ, что я предлагаю - из серии дешево и сердито, главное дело работает.
Теперь перейдем к делителю, который формимрует измеряемое электроникой сервы напряжение.
Вы докопались до слова "делим"? Так это слово имеет отношение в вычислению номиналов необходиимых сопротивлений, которые включаются на места R1 и R3, а не к способу их включения в схему! Пришлось даже в тексте выделить как у куда паять резисторы, а то может не вы один такой, кто через сторчку читает.
При среднем положении движка потенциометра и при условии, что R1=R3, напряжения снимаемое потенциометром будет равно Ucc/2, при этом не имеет значения номинал R3 и R3 в разумных пределах конечно.
Весь смысл внедрения этих резисторов состоит в том, чтобы на каждый градус поворота движка потенциометра изменение напряжения (дельта U) стало бы меньше, чем было до включения R1 и R3. В таком случае, если напряжение крайнего минимального положения в логике сервомашинки предположим +0.5В, то чтобы его достичь, сервомашинка вынуждена будет повернуть потенциометр на больший угол, соответственно увеличится и ход сервомашинки. Главное не переборщить, чтобы крайнее минимальное напряжение не вышло за пределы потенциометра, потому как в таком случае сервомашинка не сможет его достичь и может повредить потенциометр, перекрутив его. То же самое касается крайнего максимального напряжения.
Вся фишка в том, что часть напряжения падает до потенциометра на R1, а часть - после, на R3. Таким образом мы смещаем крайние значения напряжения, которые заложены в логику сервомашинки, ближе к крайним положениям движка потенциометра. Просто в большинстве сервомашинок полный ход движка потенциометра не отрабатывается, а его можно использовать.
Про паразитное влияние резисторов сравнивающей схемы поподробнее пожалуйста, каким образом и на что влияют, и вообще что резисторы?
Чтобы не упирался механически можно и в аппаратуре расходы зажать, если что, так что не критично, если при максимальных расходах упираться будет. Главное, чтобы аппаратура это позволяла.
Бояться ухода центрального положения сервы надо, иначе у вас максимальный угол поворота в одну сторону механически будет меньше, чем в другую, т.к. потенциометр механически связан с последней шестерней редуктора сервомашинки, тем на которую качалка устанавливается.
Насчет резисторов, да, входное сопротивление схемы значительно больше, чем у потенциометра, возможно, на несколько порядков, поэтому влияние их будет малозначимо.
Если R1 при этом исключить, то центр такой сервы будет болтаться где-то между третьей и четвертой четвертями хода движка потенциометра, а ход уменьшится где-то в два раза как минимум, никакой нелинейности там не возникнет, и взяться ей неоткуда.
Хуже будет, если оборвется "питание", в таком случае сервомашинка будет крутить в сторону максимального значения до тех пор пока мотор не сгорит.