
Пожалуй начну с комплектации:
Контроллер:MultiWii 328P
Регулятор:Q Brain 4 x 20A ESC 2-4S 3A SBEC
Двигатели:FC 28-12 Brushless Outrunner 1534kv
Аккумуляторы:Turnigy 2200mAh 3S 20C Lipo Pack(2шт. в параллель)
Соединитель: мама- мама JR длиной 10см
Лучи:Алюминиевая профильная труба для многороторных систем, 12.8x12.8x400мм, серебрянная
Пропсейверы:Prop Saver w/ Band 3mm (10pcs)
Пропеллеры:Пропеллеры 8045 SF (цвет чёрный) 2шт. стандартного вращения / 2шт. RH вращения.
Разъемы двигателей:PolyMax 3.5мм, 10 пар (20 шт)
Контейнер для CD дисков
Винты,гайки: М3,М4
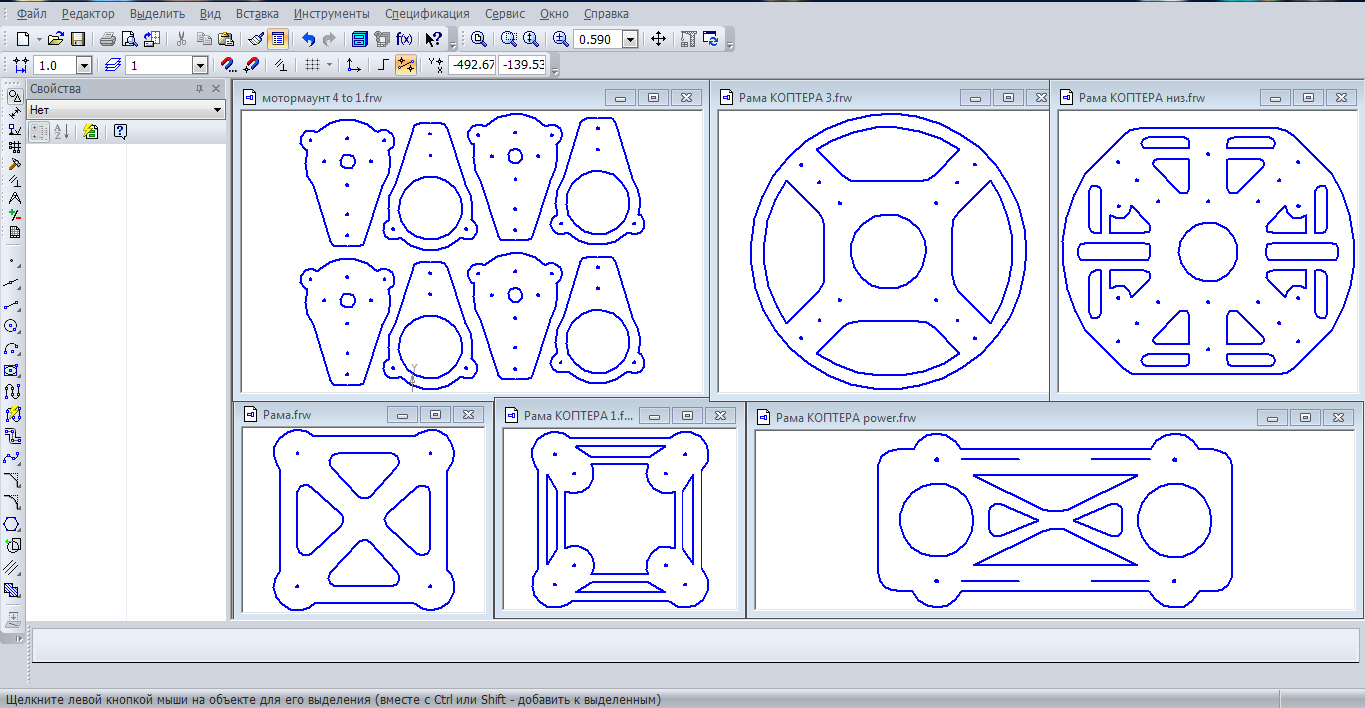
В КОМПАС-3D создан чертеж некоторых деталей квадрокоптера..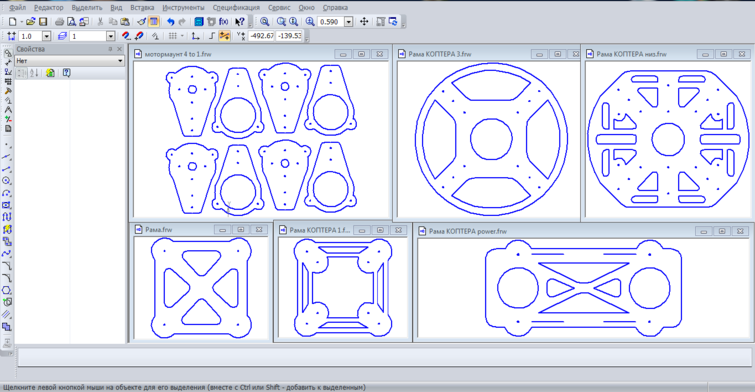
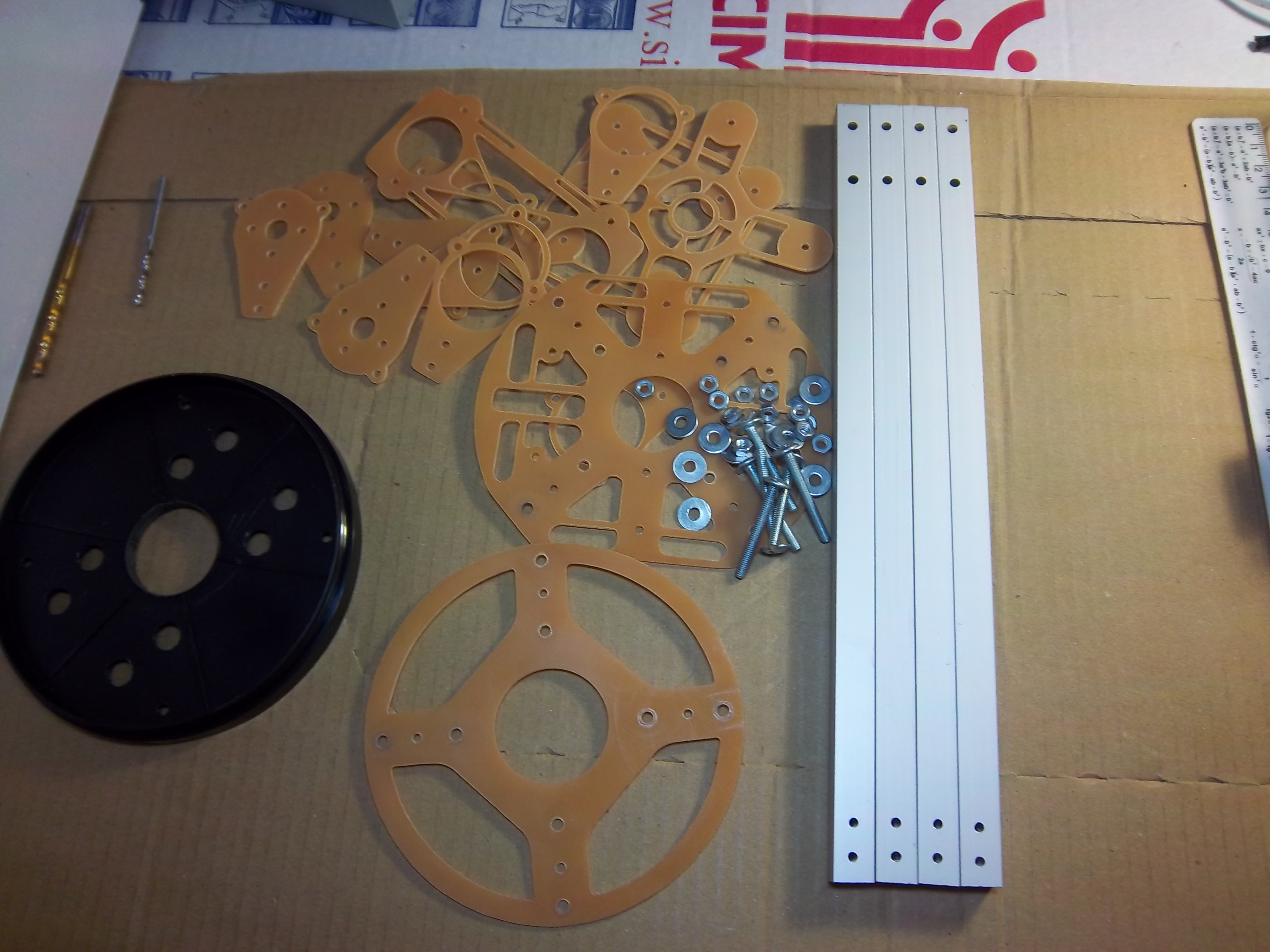
После, все детали из (2мм стеклотекстолита) были вырезаны на самодельном ЧПУ.
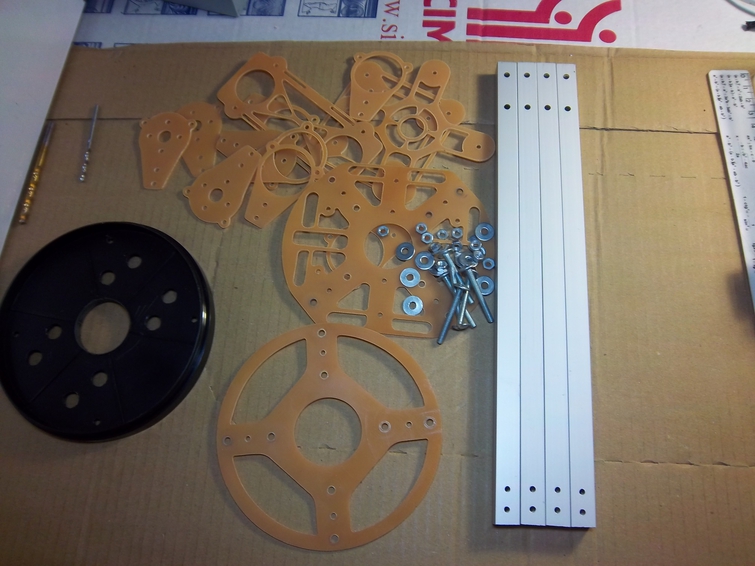
Готовые детали
Начинаем собирать
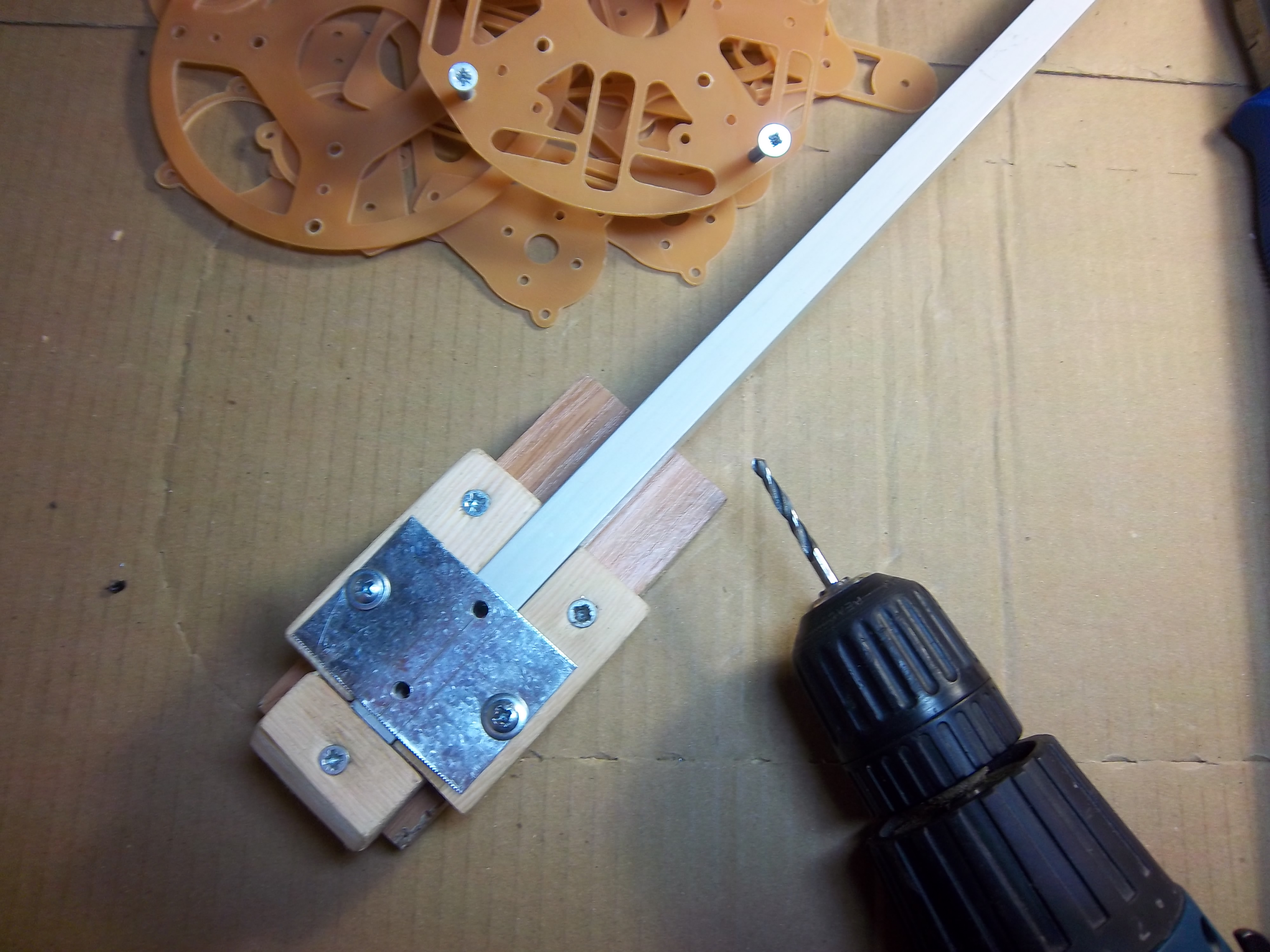
Первым делом укоротил все лучи на 10см
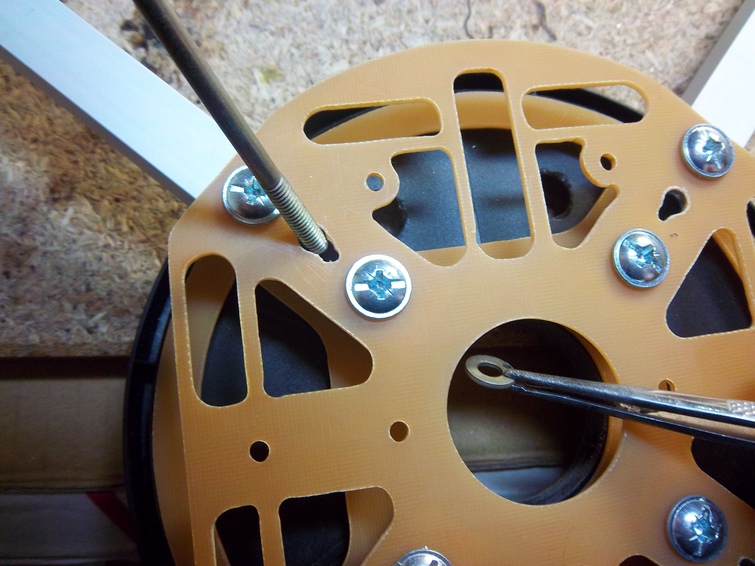
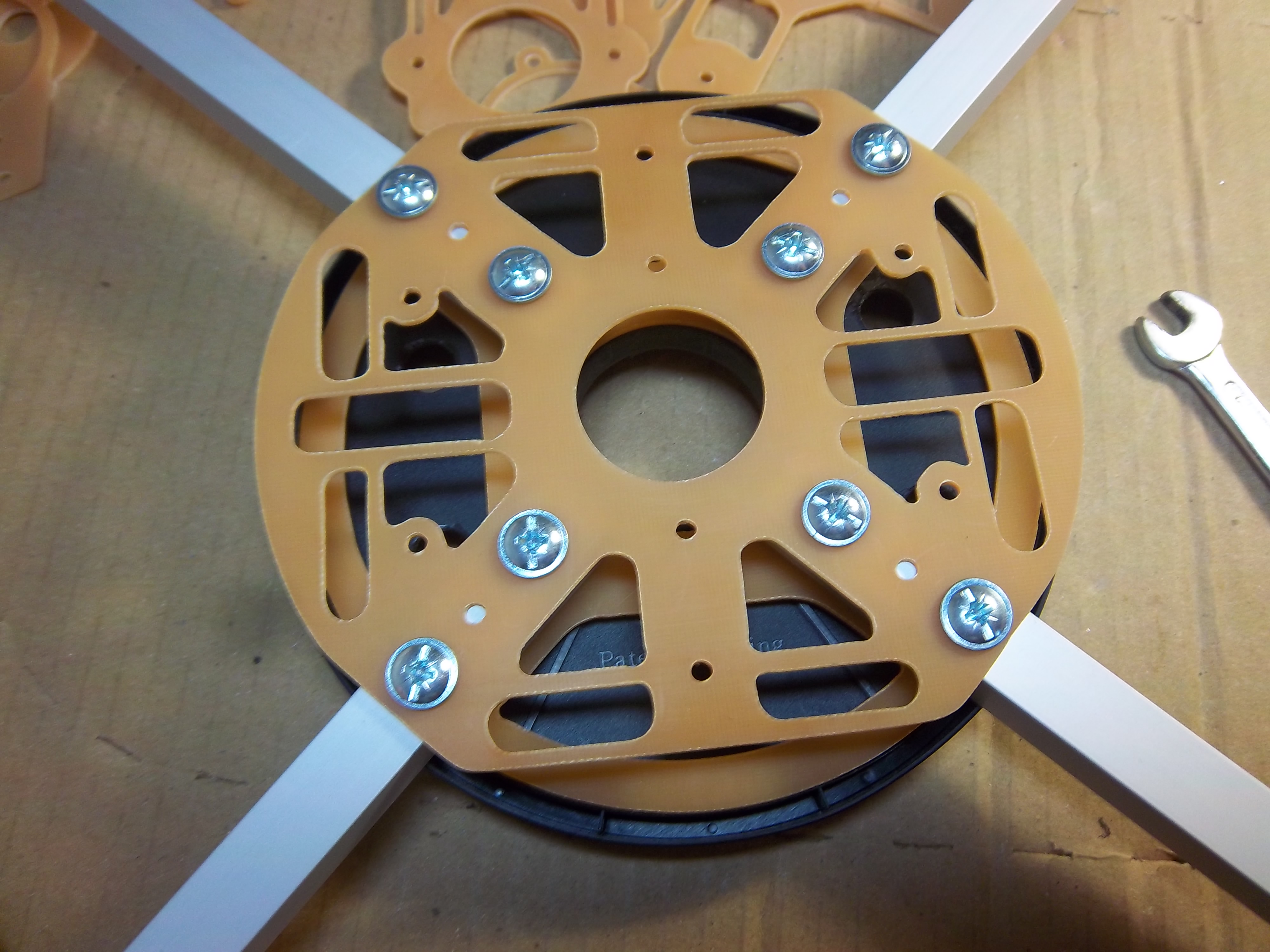
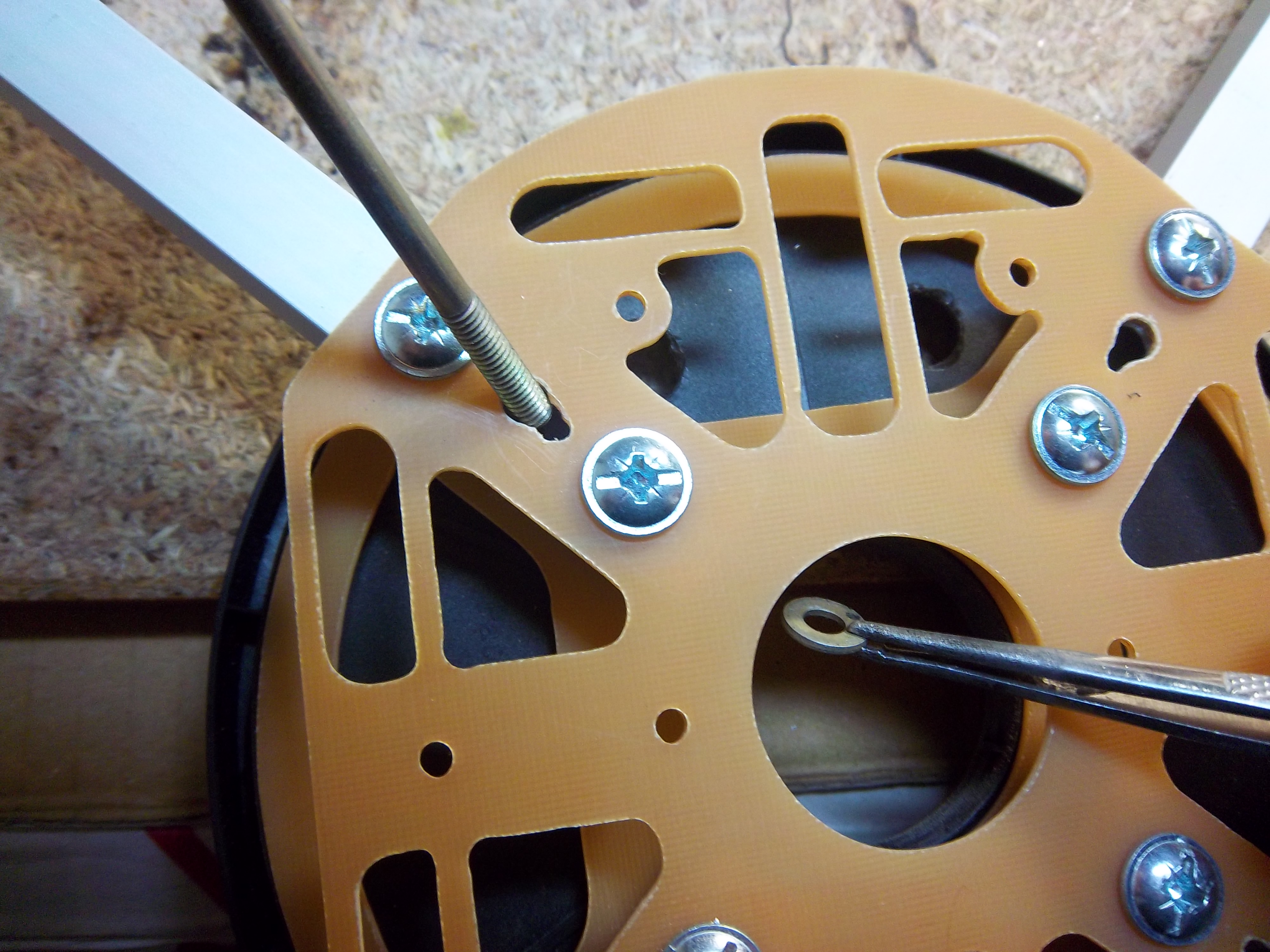
При помощи шаблона,сделал отверстия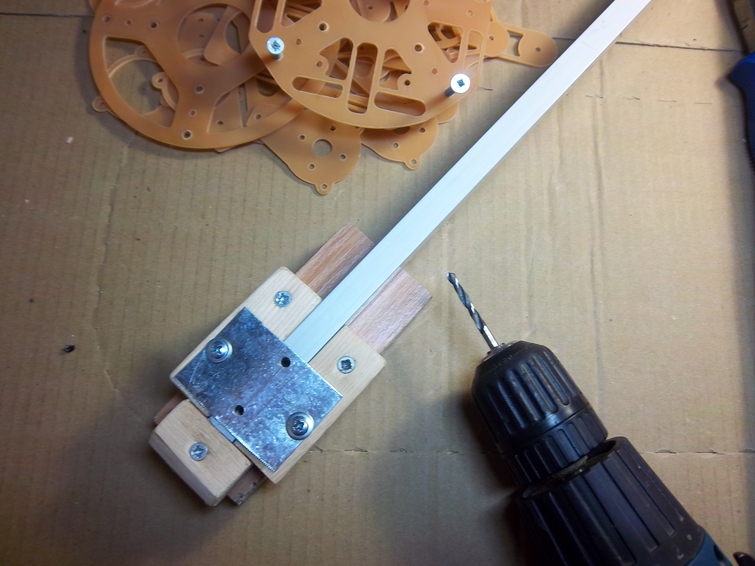
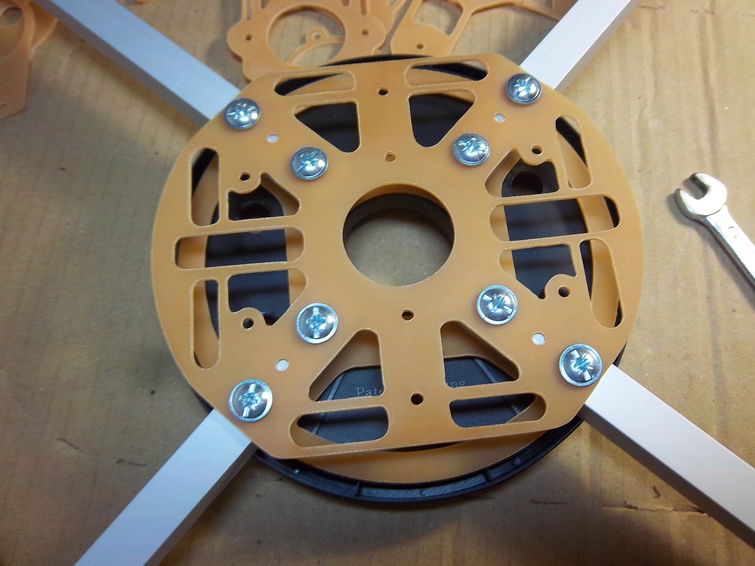
Крепим лучи к основанию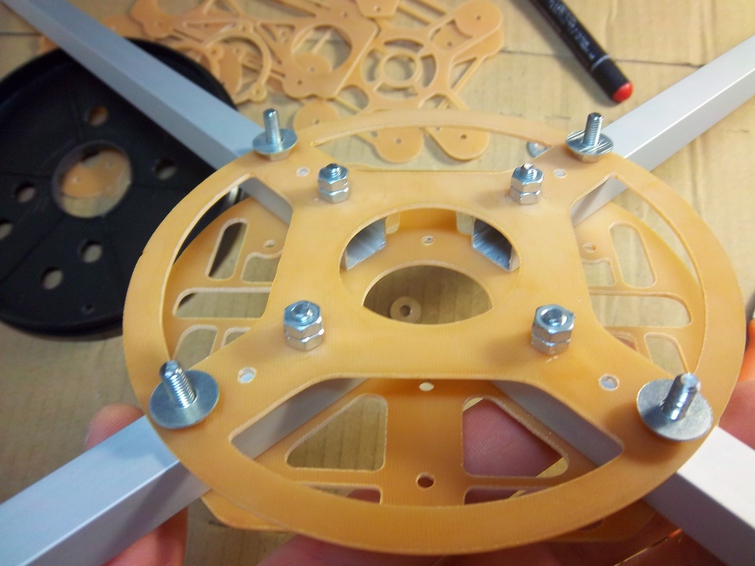
Для надежности, винт фиксируем 2-мя гайками
Двигатели, крепим на мотормаунт
Гайки фиксируем на ЭДП клей, ускорив его засыхание паяльником (при этом клей вскипает, создавая маленькие пузырьки, которые при надобности, дадут возможность раскрутить гайки)

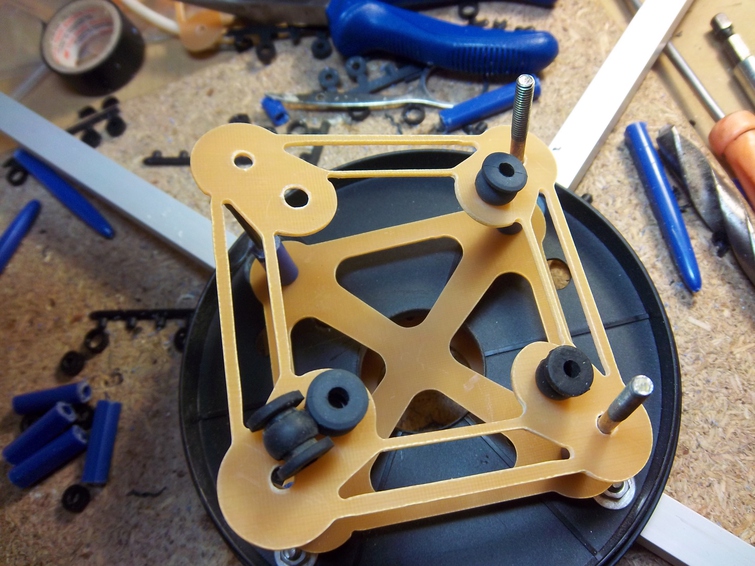
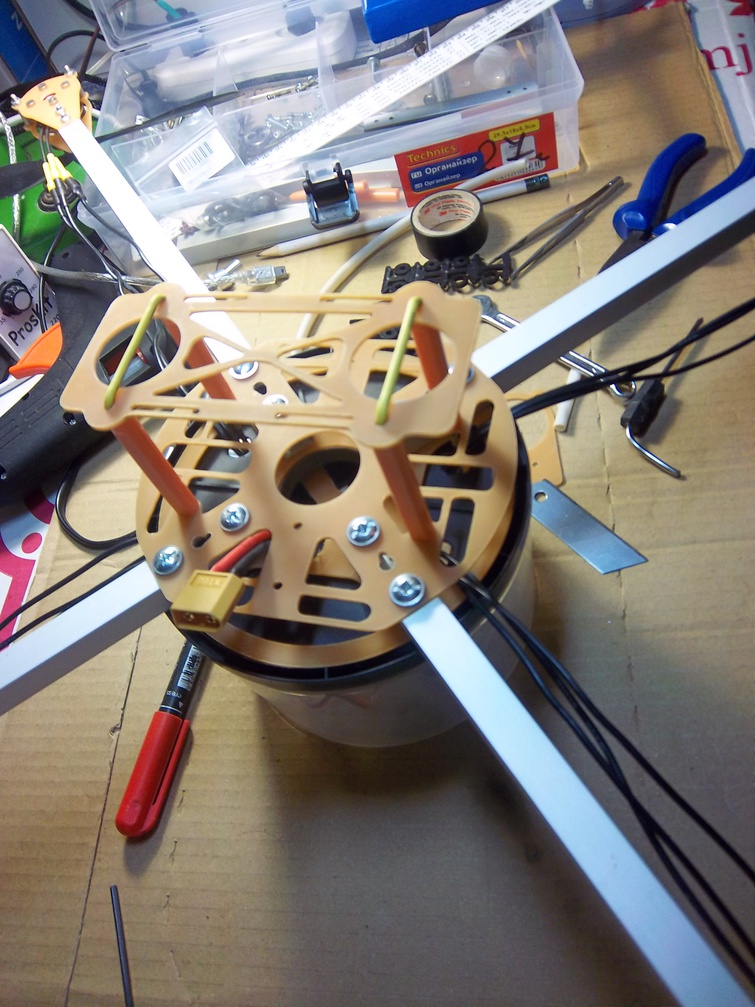
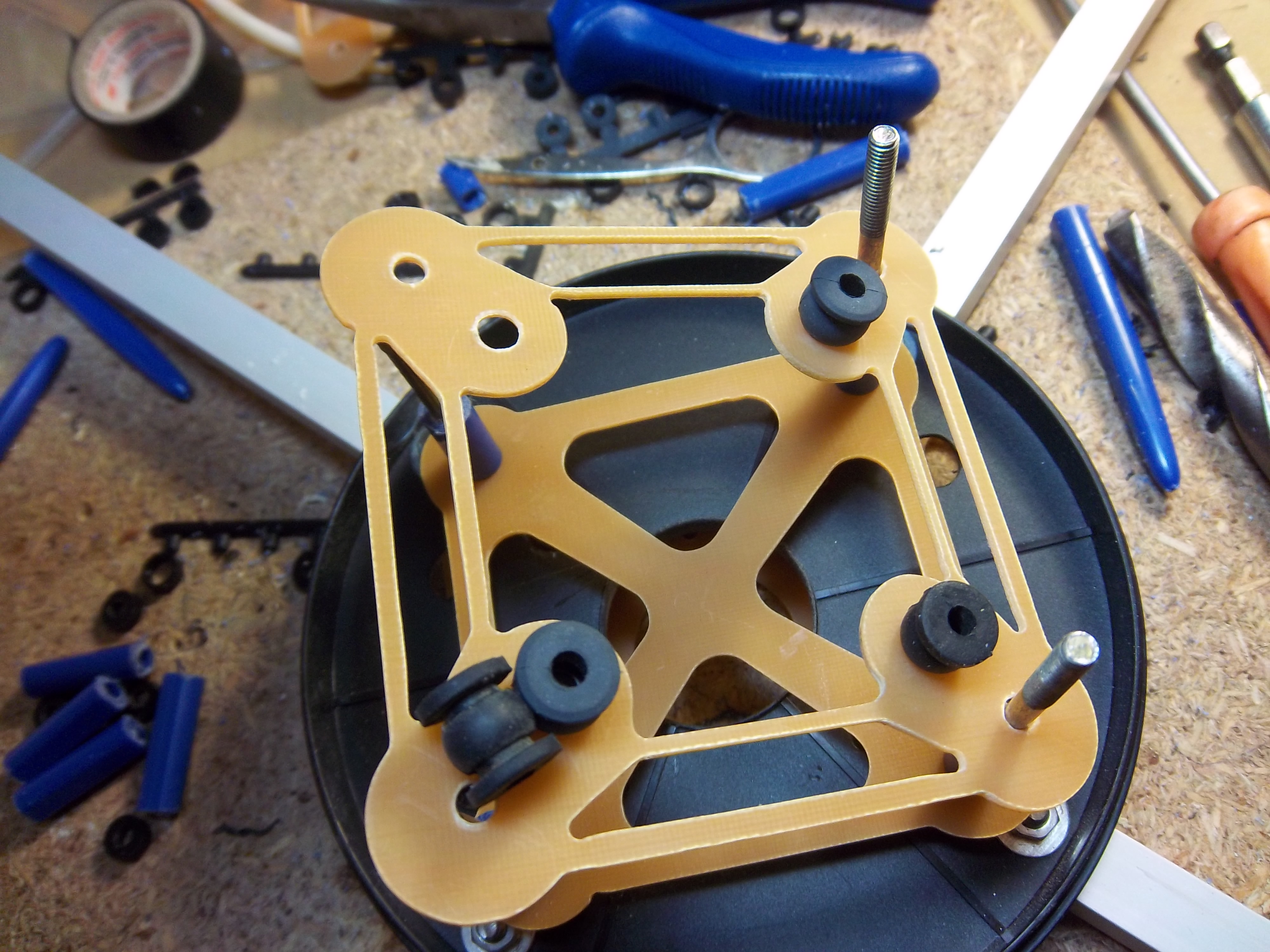
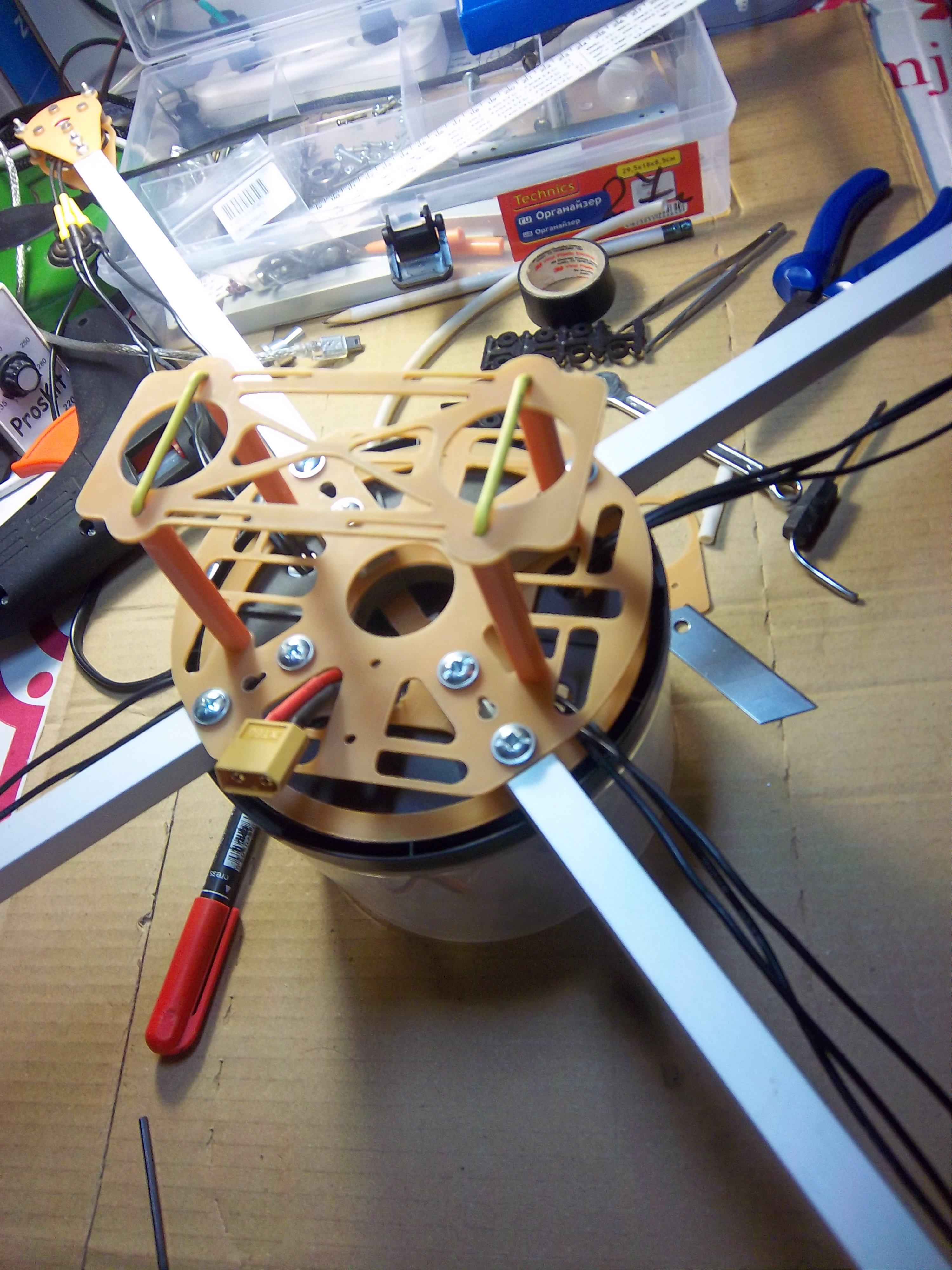
Вид полусобранной рамы
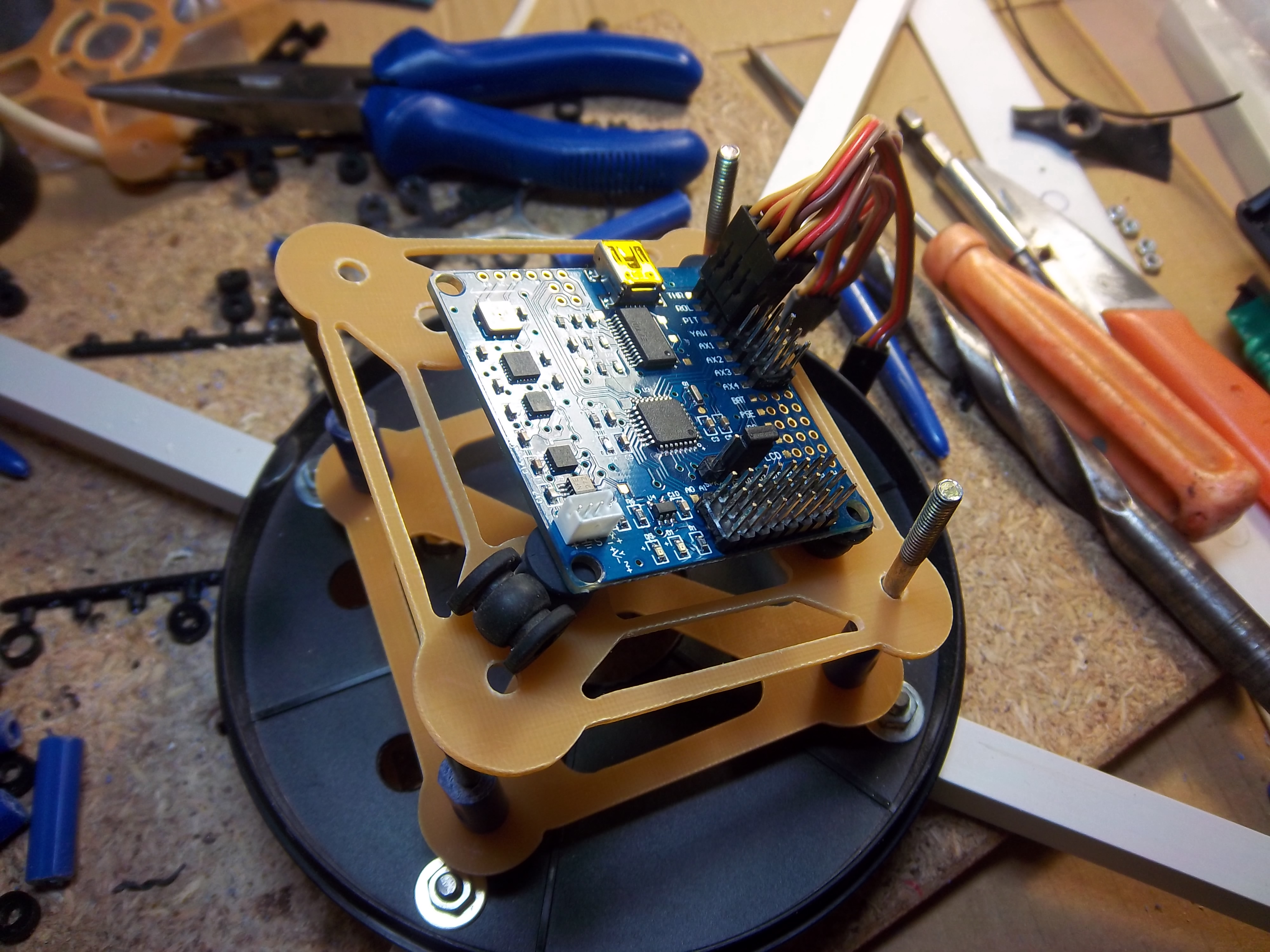
Контроллер крепим на резиновые шайбы из CD-рома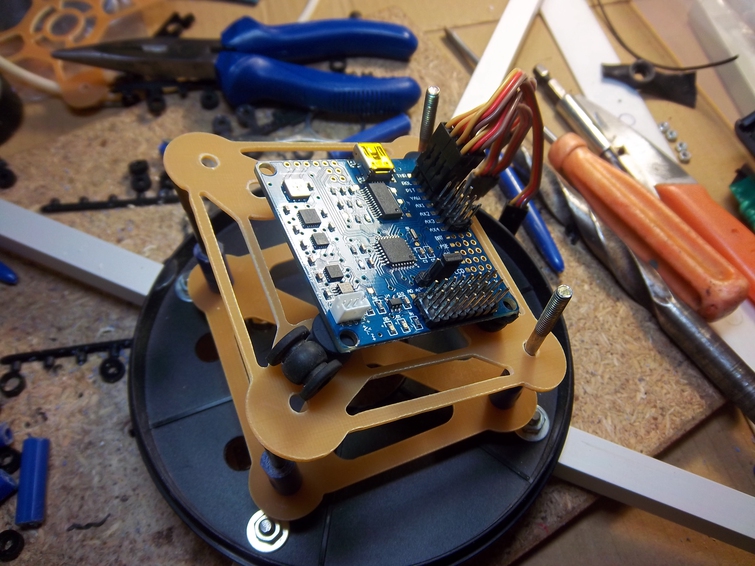
Место для аккумуляторов,крепится на две скобы с резьбой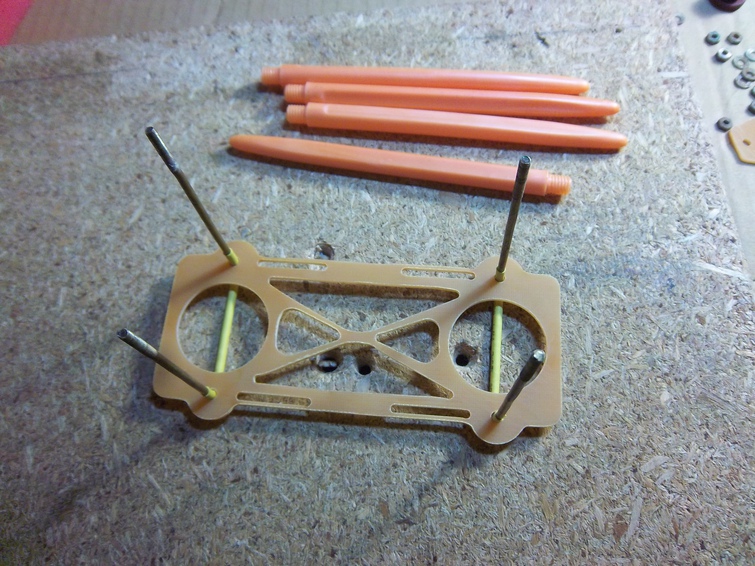
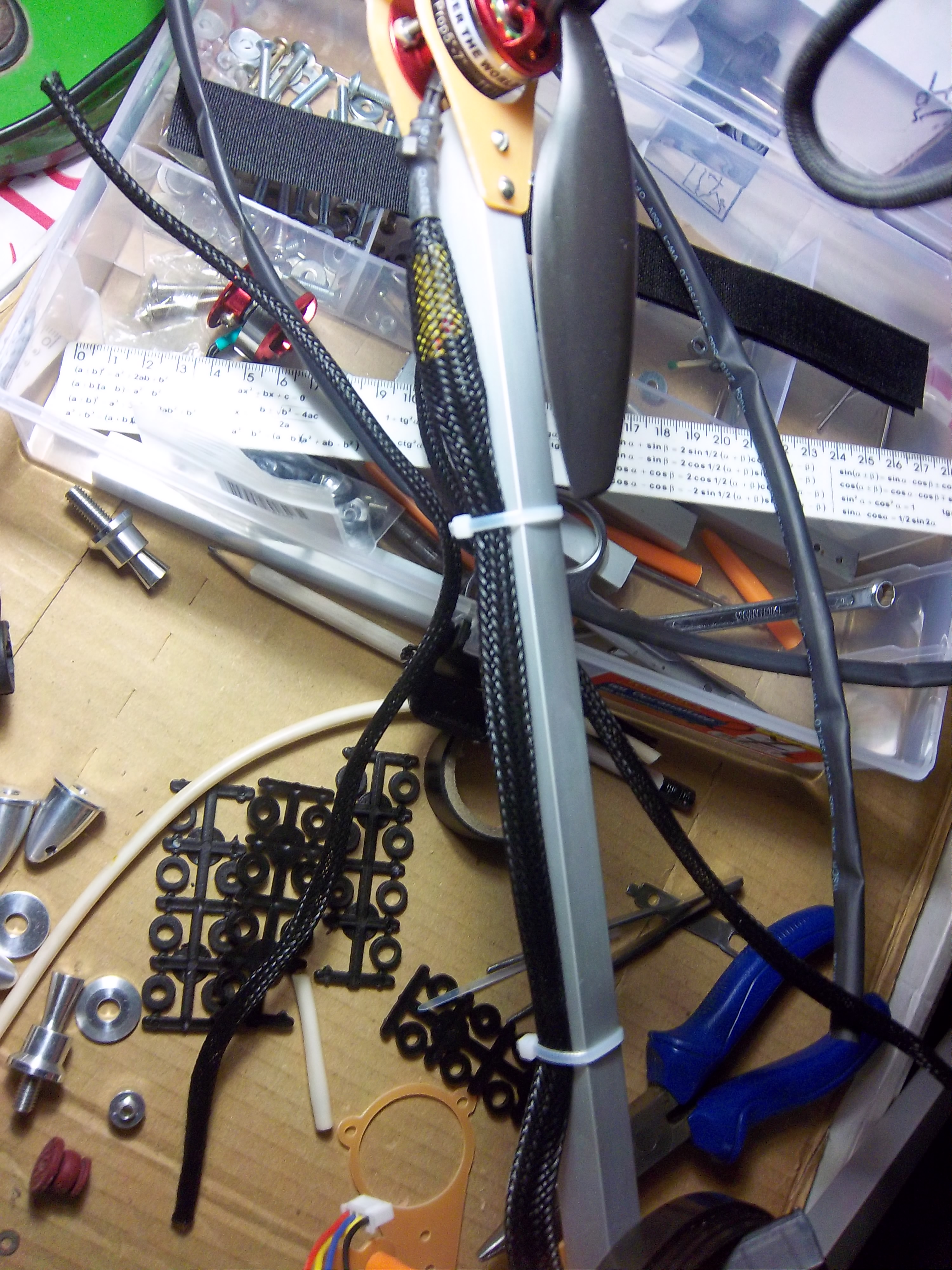
Провода идущие к моторам покрыты оплеткой для проводов (из компьютерного БП)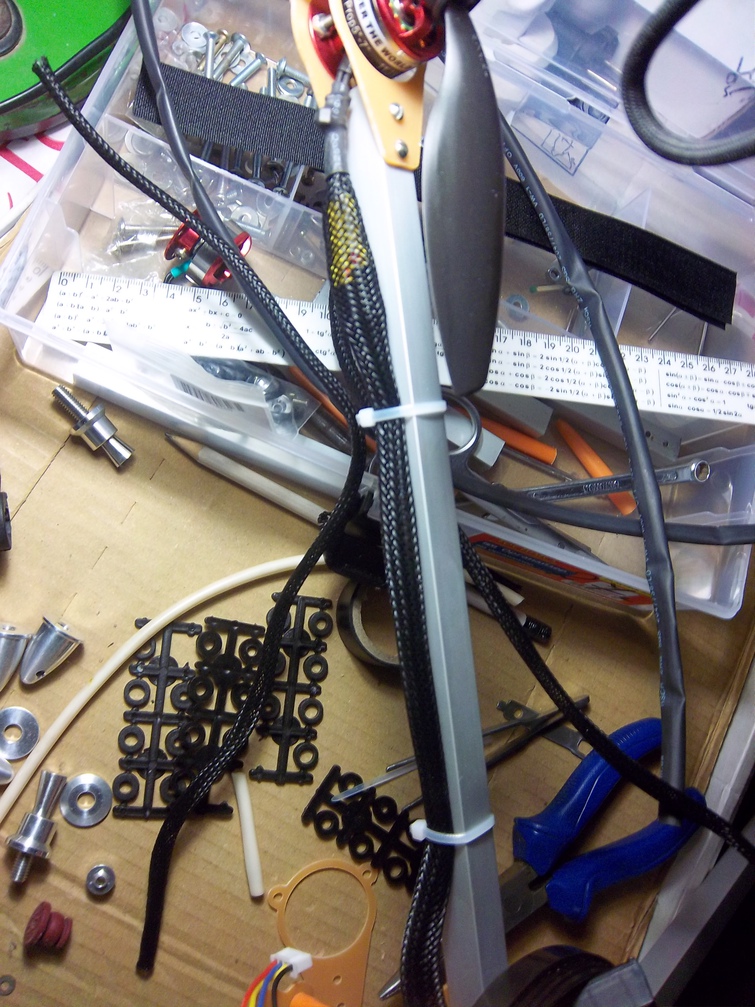
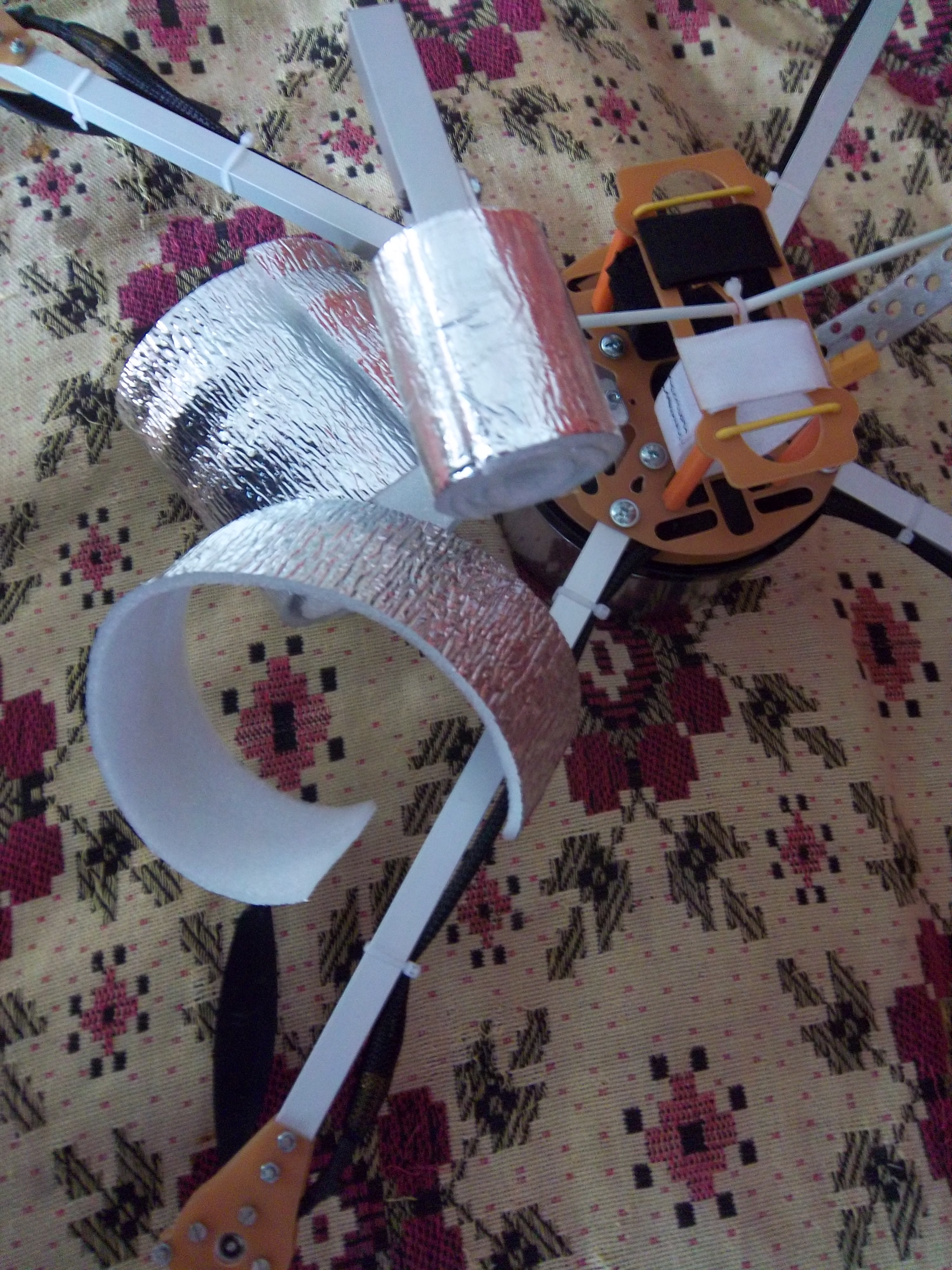
Стойки сделаны из 2мм дюралюминия и 10см обрезков профильной трубы,на нее намотана теплоизоляционная фольга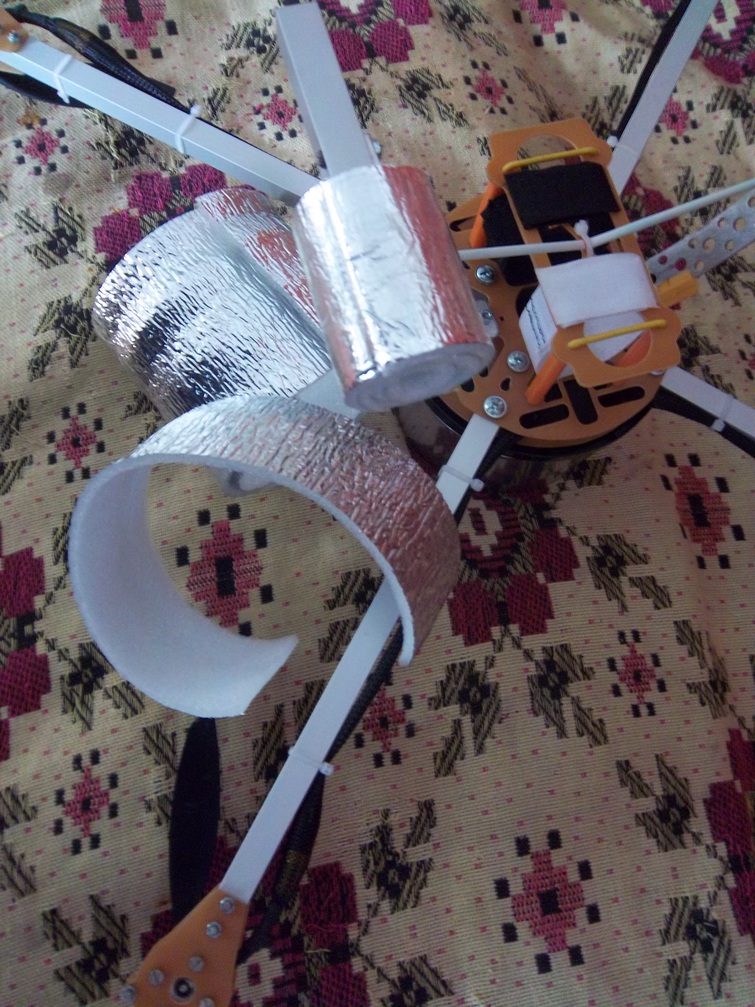
Дошло время до настройки, и испытания:
1.Балансируем пропеллеры (Самодельный стенд для балансировки пропеллеров за 10 минут)
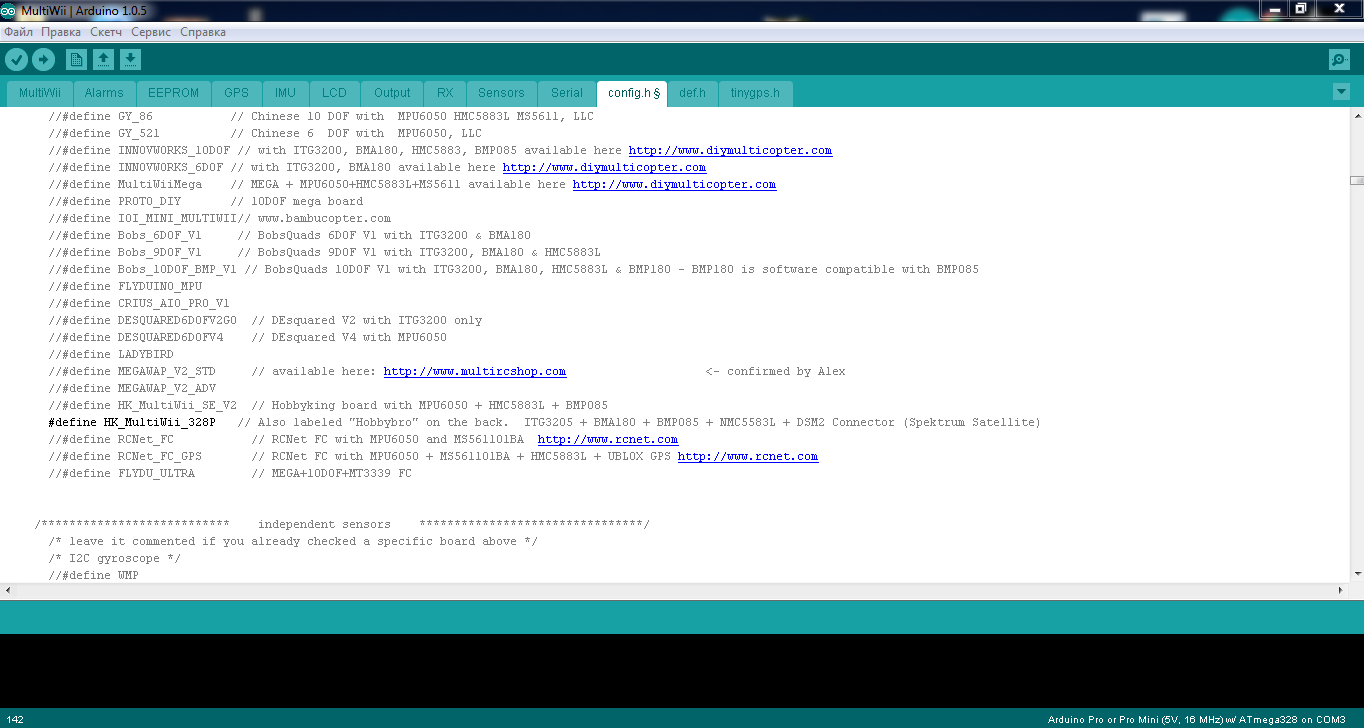
2.Прошиваем контроллер
3.Калибруем и настраиваем PID
4.Взлетаем, и не падаем!=)


Подробно о прошивке смотрите в интернете,(поскольку не очень силен в Arduino)
Спасибо за внимание!
Контроллер:MultiWii 328P
Регулятор:Q Brain 4 x 20A ESC 2-4S 3A SBEC
Двигатели:FC 28-12 Brushless Outrunner 1534kv
Аккумуляторы:Turnigy 2200mAh 3S 20C Lipo Pack(2шт. в параллель)
Соединитель: мама- мама JR длиной 10см
Лучи:Алюминиевая профильная труба для многороторных систем, 12.8x12.8x400мм, серебрянная
Пропсейверы:Prop Saver w/ Band 3mm (10pcs)
Пропеллеры:Пропеллеры 8045 SF (цвет чёрный) 2шт. стандартного вращения / 2шт. RH вращения.
Разъемы двигателей:PolyMax 3.5мм, 10 пар (20 шт)
Контейнер для CD дисков
Винты,гайки: М3,М4
В КОМПАС-3D создан чертеж некоторых деталей квадрокоптера..
После, все детали из (2мм стеклотекстолита) были вырезаны на самодельном ЧПУ.

Готовые детали

Начинаем собирать

Первым делом укоротил все лучи на 10см

При помощи шаблона,сделал отверстия
Крепим лучи к основанию

Для надежности, винт фиксируем 2-мя гайками

Двигатели, крепим на мотормаунт

Гайки фиксируем на ЭДП клей, ускорив его засыхание паяльником (при этом клей вскипает, создавая маленькие пузырьки, которые при надобности, дадут возможность раскрутить гайки)

Вид полусобранной рамы

Контроллер крепим на резиновые шайбы из CD-рома
Место для аккумуляторов,крепится на две скобы с резьбой

Провода идущие к моторам покрыты оплеткой для проводов (из компьютерного БП)
Стойки сделаны из 2мм дюралюминия и 10см обрезков профильной трубы,на нее намотана теплоизоляционная фольга
Дошло время до настройки, и испытания:
1.Балансируем пропеллеры (Самодельный стенд для балансировки пропеллеров за 10 минут)

2.Прошиваем контроллер
3.Калибруем и настраиваем PID
4.Взлетаем, и не падаем!=)



Подробно о прошивке смотрите в интернете,(поскольку не очень силен в Arduino)
Спасибо за внимание!













Вопросы:
Прошивка я так понимаю - мультивийная. Или маховии? Не нашел ни слова.
Нету ТТХ квадрика - время полета на акках 2200 (или какие там у вас), сколько по времени полет в режиме висения, какой газ висения в процентах, сколько мА залилось после зарядки, вес квадрика...
Какие планы - просто летать по пульту, или...
Еще совет: банку от СД дисков после краша (а он будет - я уверен), поменяйте на контейнер для пищевых продуктов из хозмага. Хоть круглый, хоть квадратный. Пластик не так сильно разлетается на морозе при краше, а весит те же 50 грамм.
Еще 2 задних луча (конфигурация Х - ага?) - обклейте красным скотчем, или поставьтепо красному светодиодику (я использовал LED ленту -спереди белогоЮ, сзади красного цвета). Ориентироваться в воздухе станет гораздо лучше.
И ещё для поиска улетевшего квадрика - хотя бы пищалку на канал повесить (тут же на парке есть).
2.Аккумуляторы два по 2200 (4400-в параллель).
3.Время полета 12 ~ 15 минут! Вес ~1кг.
4.Или.. только пульт!!!! GPS-При таких параметрах не очень то и нужен! Если что и добавится, то это FPV!!
5.Ориентир не успел сделать... Квадрик пока в тестовом режиме! (Ну а далее LED лента и т.д-доработаю позже)
6.в MultiWii есть функция сигнала утерянного квадрика... Разбираюсь с Arduino//......
7.Контейнер треснул, после первого падения - оклеил его скотчем, теперь норм...
Летал в городе, на парковке. Улетел и все. НЕТ его. - 8000р.
Мы с Тимуром уже 3 квадрика в трубу запустили. Точнее в НЕБО. (((
А причина какая??
зарулился с высотой. Квад начал прыгать. Да и ронять не хотелось об землю. и машина друга стояла под ним. Я его задрал высоко и его ветром понесло. После недолгой рулежки я потерял с ним связь. Поиски не дали + результатов. Вот жду звонка, может кто найдет.
Не пожалей денег на GPS -GSM трекер.!!!! ну или пищалку на свободный канал приемника нацепи. Я до сих пор не могу простить себе этой халатности.
Ваша технология заточена под Ваш станок ЧПУ.За это тоже +.
Поэтому вопросы по конструкции сами собой отпадают, но простым моделистам не рекомендую, потому что все эти элементы рамы без ЧПУ не выполнить. Кроме того Вес этой конструкции для авиамодели тяжеловат. Поэтому начинающим нужно использовать всё же традиционные материалы и технологии. Во всём же остальном Вы в этом деле преуспели, как Генри Форд в своём производвтве автомобилей. Спасибо за статью.