Доброго всем времени суток! В данной статье хочу рассказать о своем опыте использования автопилота HKPilot Mega V2.52 (Автопилот HKPilot Mega V2.5 USB/GYRO/ACC/MAG/BARO). До этого использовал не менее популярный контроллер стабилизации KK 2.0. Теперь, когда получен какой-то опыт пилотирования решил перейти на что-то более серьезное.


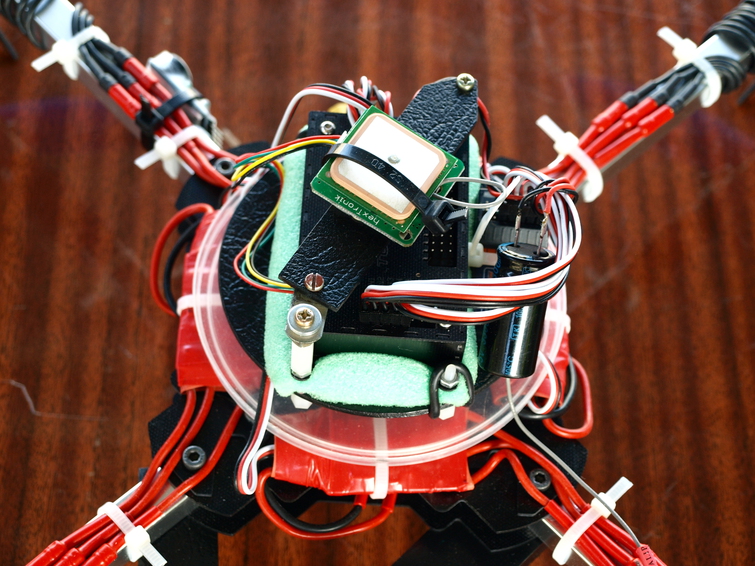
Итак, плату распределения питания перенес ниже, установил между двумя стеклопластиковыми платформами рамы, до этого она была установлена под контроллером. Во-первых, не хватало места, во-вторых, все силовые узлы нужно размещать как можно ниже от автопилота, так как магнитометр автопилота очень чувствителен к электромагнитным помехам. Вырезал круг, который используется в качестве основы для автопилота из черного полистерола, который был закреплен на стойках к раме. Для защиты автопилота купил защитный корпус: Защитный корпус Turnigy для полетного контроллера HKPilot Mega V2.5 С ним смотрится очень аккуратно и красиво)
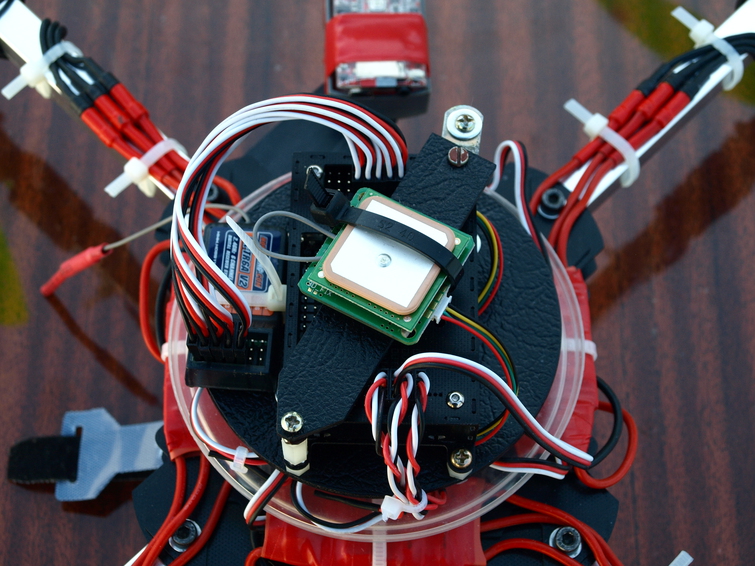 GPS модуль этот: GPS модуль NEO-6M Вполне оправдывает свою цену, позиционирование с ним довольно точное.
GPS модуль этот: GPS модуль NEO-6M Вполне оправдывает свою цену, позиционирование с ним довольно точное.
Прошивка и настройки автопилота делаются с помощью программы Mission Planner. Думаю нет смысла рассказывать о настройках и прошивке, так как на сайте об этом уже написано много статей с подробным описанием, которыми также пользовался)
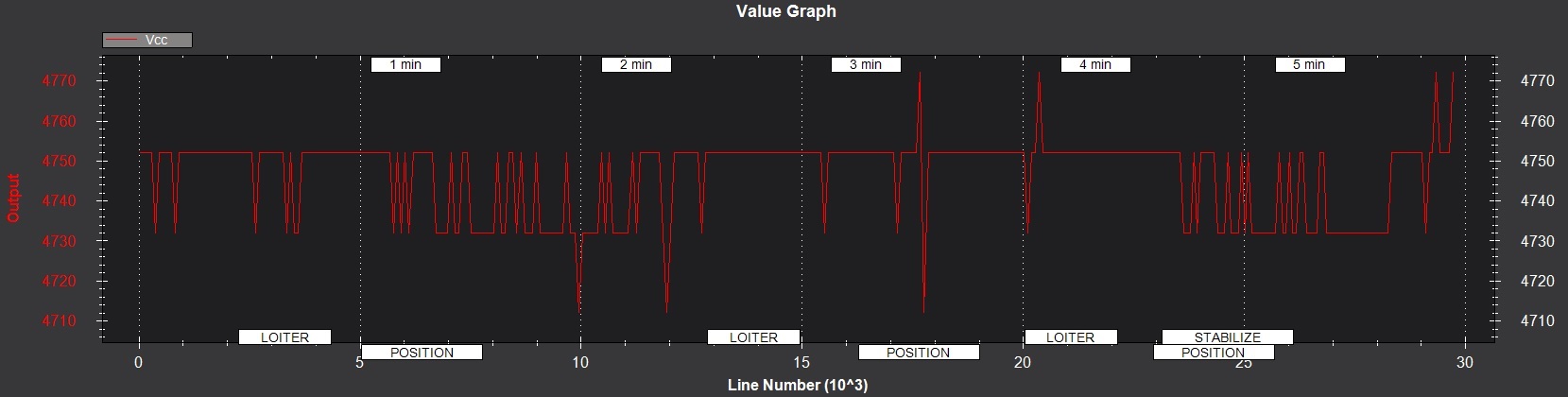
Питание автопилота пока что осуществляю через BEC одного регулятора, на остальных трех регуляторах плюсовой провод отсоединил. Как показали испытания, имеется просадка питания, примерно до 4,7 Вольт. Один BEC рекомендуется использовать при настройке, для полетов все же лучше и надежнее использовать два BEC двух регуляторов, то есть, чтоб один питал приемник, а второй автопилот. Ниже представлен лог-файл с графиком напряжения, при полете с одним BEC. К счастью перезагрузки из-за падения напряжения не произошло, колебания в более-менее допустимых пределах, однако с этим надо работать.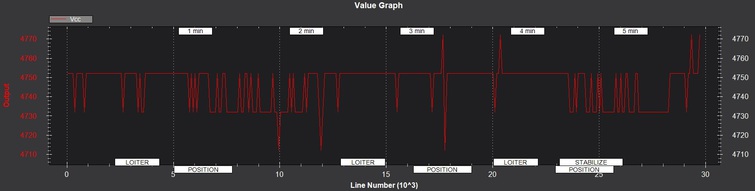 Планирую разделить питание и питать от двух BEC, как описывал выше, а в дальнейшем использовать этот модуль питания, который дополнительно оснащен датчиками тока: Модуль питания HKPilot с T-разъёмами и 6-контактным 150мм кабелем
Планирую разделить питание и питать от двух BEC, как описывал выше, а в дальнейшем использовать этот модуль питания, который дополнительно оснащен датчиками тока: Модуль питания HKPilot с T-разъёмами и 6-контактным 150мм кабелем
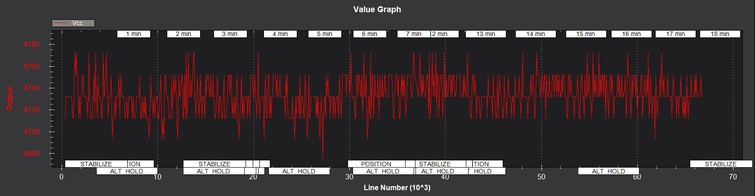
Также для стабилизации скачков использовал электролит номиналом 3300 мкФ x 35 Вольт, однако сильно заметных результатов это не дало, судя по всему дело в самом BEC, нужно уменьшить нагрузку на него, хотя BEC регулятора рассчитан на 2 Ампера, но как всегда эти параметры завышены, а запас мощности маловат. Ниже лог-файл с графиком питания при использовании электролита.
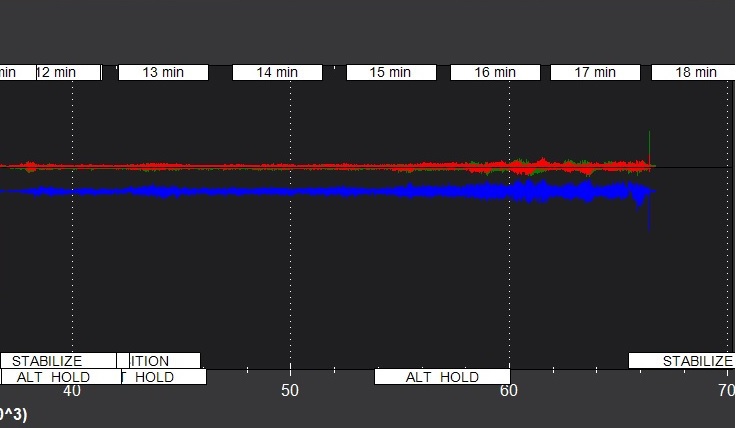
Далее перейдем к не менее важным явлениям - вибрациям. Ниже представлен лог -файл с диаграммой вибраций по всем трем осям:
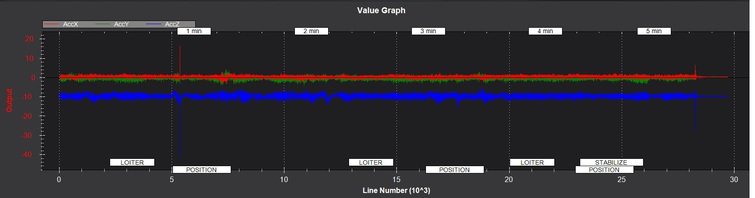 В принципе, все показания близки к норме, сильные отклонения были только при резких ускорениях/остановках, что вполне логично, либо при жесткой посадке. Все же после нескольких запусков, я задумался о виброразвязке, чем меньше вибрации - тем стабильнее полет, и больше ресурс датчиков. В качестве эксперимента я выбрал самый простой и быстрый способ - губка для мытья посуды) С губки снял жесткую темно-зеленую часть и установил на нее до этого жестко прикрученный на стойках корпус с автопилотом. Для фиксации использовал две резинки от пропсейверов. Кстати, на фото ниже виден конденсатор.
В принципе, все показания близки к норме, сильные отклонения были только при резких ускорениях/остановках, что вполне логично, либо при жесткой посадке. Все же после нескольких запусков, я задумался о виброразвязке, чем меньше вибрации - тем стабильнее полет, и больше ресурс датчиков. В качестве эксперимента я выбрал самый простой и быстрый способ - губка для мытья посуды) С губки снял жесткую темно-зеленую часть и установил на нее до этого жестко прикрученный на стойках корпус с автопилотом. Для фиксации использовал две резинки от пропсейверов. Кстати, на фото ниже виден конденсатор.
Итак, посмотрим на диаграмму с использованием виброразвязки:
Особых изменений это не принесло, однако в некоторых местах все же минимальный показатель уменьшился. В общем по этой части еще предстоит работать и экспериментировать.
Итак, автопилот обладает огромными возможностями, большим набором полетных режимов. Пока что мне удалось проверить и протестировать на практике 4 из них, это:
-Stabilize (стабилизация, как и у любого полетного контроллера);
-Position (режим удержания позиции с помощью GPS-модуля);
-Alt Hold (режим удержания высоты);
-Loiter (режим полного удержания позиции, то есть высоты и позиции одновременно).
Все режимы работали отлично на мой взгляд, я остался доволен, ниже видео с тестом режима Loiter:
Взлет в режиме Stabilize и полет в режиме Alt Hold + Simple mode (Simple mode - это такой режим, при котором вы не потеряете ориентацию "нос - корма", так как какой-бы стороной вы не повернули аппарат, он всегда будет лететь к вам, если вы тянете стик тангажа на себя, либо от вас соответственно. (Разумеется, если вы сами не меняли позицию после взлета!):
Далее видео с борта аппарата. Камеру крепил таким вот способом:
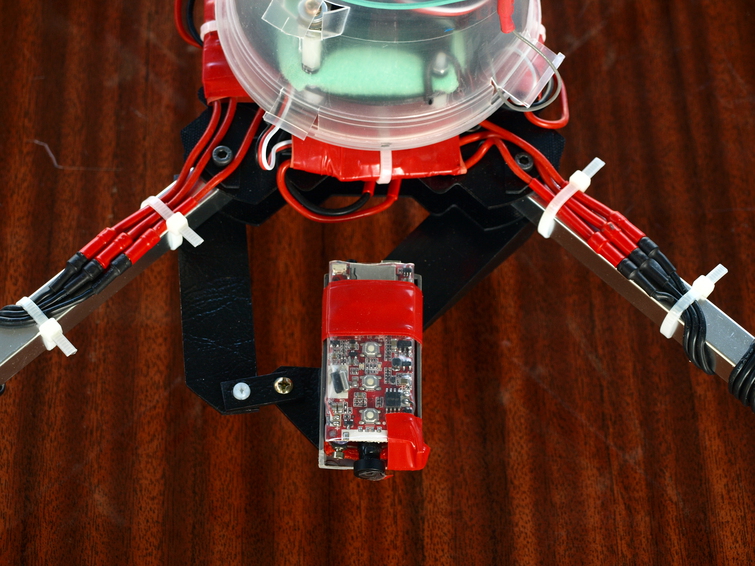
Тут также не очень доволен этим креплением, так как камера немного дрожит в некоторых случаях (некоторые видео стабилизировал YouTube), да и весит многовато, буду переделывать в будущем)
С видом на работающий двигатель:
Тут необходимо отметить один нюанс, когда полет происходит в режиме Stabilize и вам необходимо поварачивать аппарат вокруг своей оси, нужно быть предельно аккуратным, иначе можно задеть газ (стик то один) и в следствии чего потерять контроль над аппаратом, вот такой фейл произошол в связи с этим:
Однако, я выровнял аппарат и ничего серьезного не произолшо).
В будущем планирую использовать с телеметрией на 433 мГц.
Всем удачных полетов и посадок! Жду адекватной критики и комментариев!
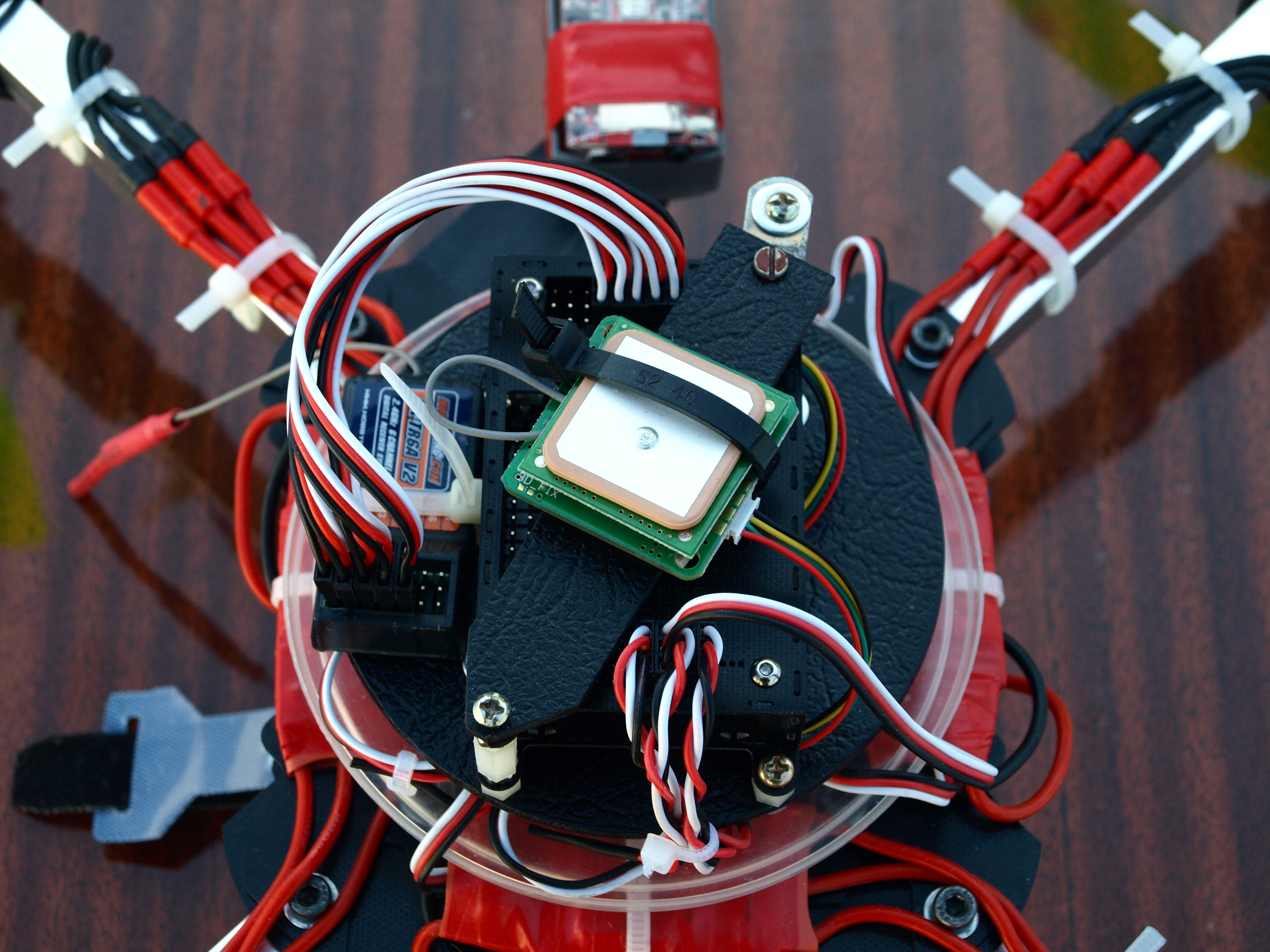 GPS модуль этот: GPS модуль NEO-6M Вполне оправдывает свою цену, позиционирование с ним довольно точное.
GPS модуль этот: GPS модуль NEO-6M Вполне оправдывает свою цену, позиционирование с ним довольно точное. Прошивка и настройки автопилота делаются с помощью программы Mission Planner. Думаю нет смысла рассказывать о настройках и прошивке, так как на сайте об этом уже написано много статей с подробным описанием, которыми также пользовался)
Питание автопилота пока что осуществляю через BEC одного регулятора, на остальных трех регуляторах плюсовой провод отсоединил. Как показали испытания, имеется просадка питания, примерно до 4,7 Вольт. Один BEC рекомендуется использовать при настройке, для полетов все же лучше и надежнее использовать два BEC двух регуляторов, то есть, чтоб один питал приемник, а второй автопилот. Ниже представлен лог-файл с графиком напряжения, при полете с одним BEC. К счастью перезагрузки из-за падения напряжения не произошло, колебания в более-менее допустимых пределах, однако с этим надо работать.
 Планирую разделить питание и питать от двух BEC, как описывал выше, а в дальнейшем использовать этот модуль питания, который дополнительно оснащен датчиками тока: Модуль питания HKPilot с T-разъёмами и 6-контактным 150мм кабелем
Планирую разделить питание и питать от двух BEC, как описывал выше, а в дальнейшем использовать этот модуль питания, который дополнительно оснащен датчиками тока: Модуль питания HKPilot с T-разъёмами и 6-контактным 150мм кабелем Также для стабилизации скачков использовал электролит номиналом 3300 мкФ x 35 Вольт, однако сильно заметных результатов это не дало, судя по всему дело в самом BEC, нужно уменьшить нагрузку на него, хотя BEC регулятора рассчитан на 2 Ампера, но как всегда эти параметры завышены, а запас мощности маловат. Ниже лог-файл с графиком питания при использовании электролита.

Далее перейдем к не менее важным явлениям - вибрациям. Ниже представлен лог -файл с диаграммой вибраций по всем трем осям:
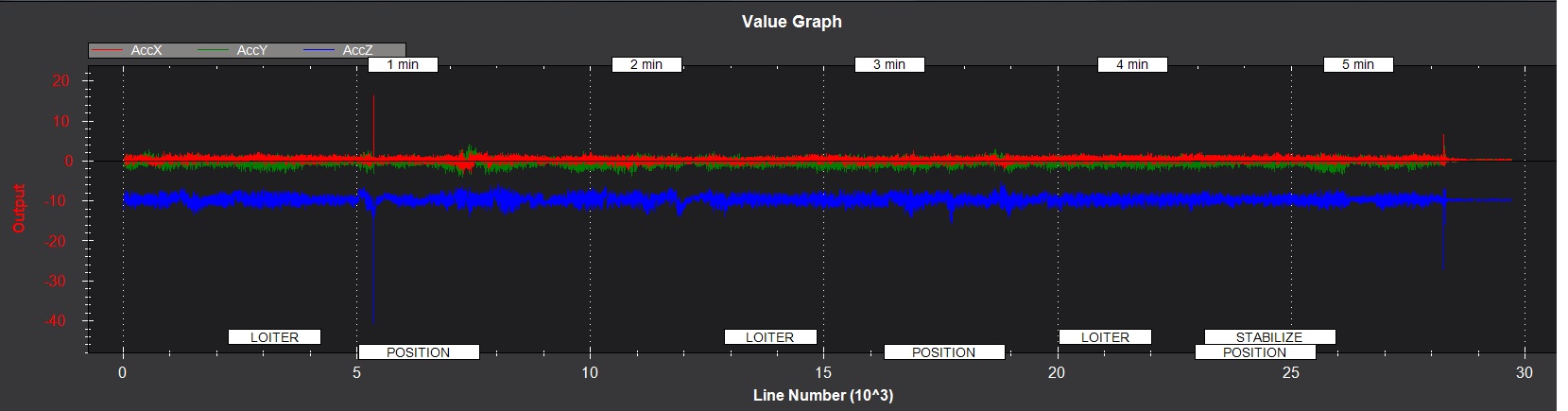 В принципе, все показания близки к норме, сильные отклонения были только при резких ускорениях/остановках, что вполне логично, либо при жесткой посадке. Все же после нескольких запусков, я задумался о виброразвязке, чем меньше вибрации - тем стабильнее полет, и больше ресурс датчиков. В качестве эксперимента я выбрал самый простой и быстрый способ - губка для мытья посуды) С губки снял жесткую темно-зеленую часть и установил на нее до этого жестко прикрученный на стойках корпус с автопилотом. Для фиксации использовал две резинки от пропсейверов. Кстати, на фото ниже виден конденсатор.
В принципе, все показания близки к норме, сильные отклонения были только при резких ускорениях/остановках, что вполне логично, либо при жесткой посадке. Все же после нескольких запусков, я задумался о виброразвязке, чем меньше вибрации - тем стабильнее полет, и больше ресурс датчиков. В качестве эксперимента я выбрал самый простой и быстрый способ - губка для мытья посуды) С губки снял жесткую темно-зеленую часть и установил на нее до этого жестко прикрученный на стойках корпус с автопилотом. Для фиксации использовал две резинки от пропсейверов. Кстати, на фото ниже виден конденсатор.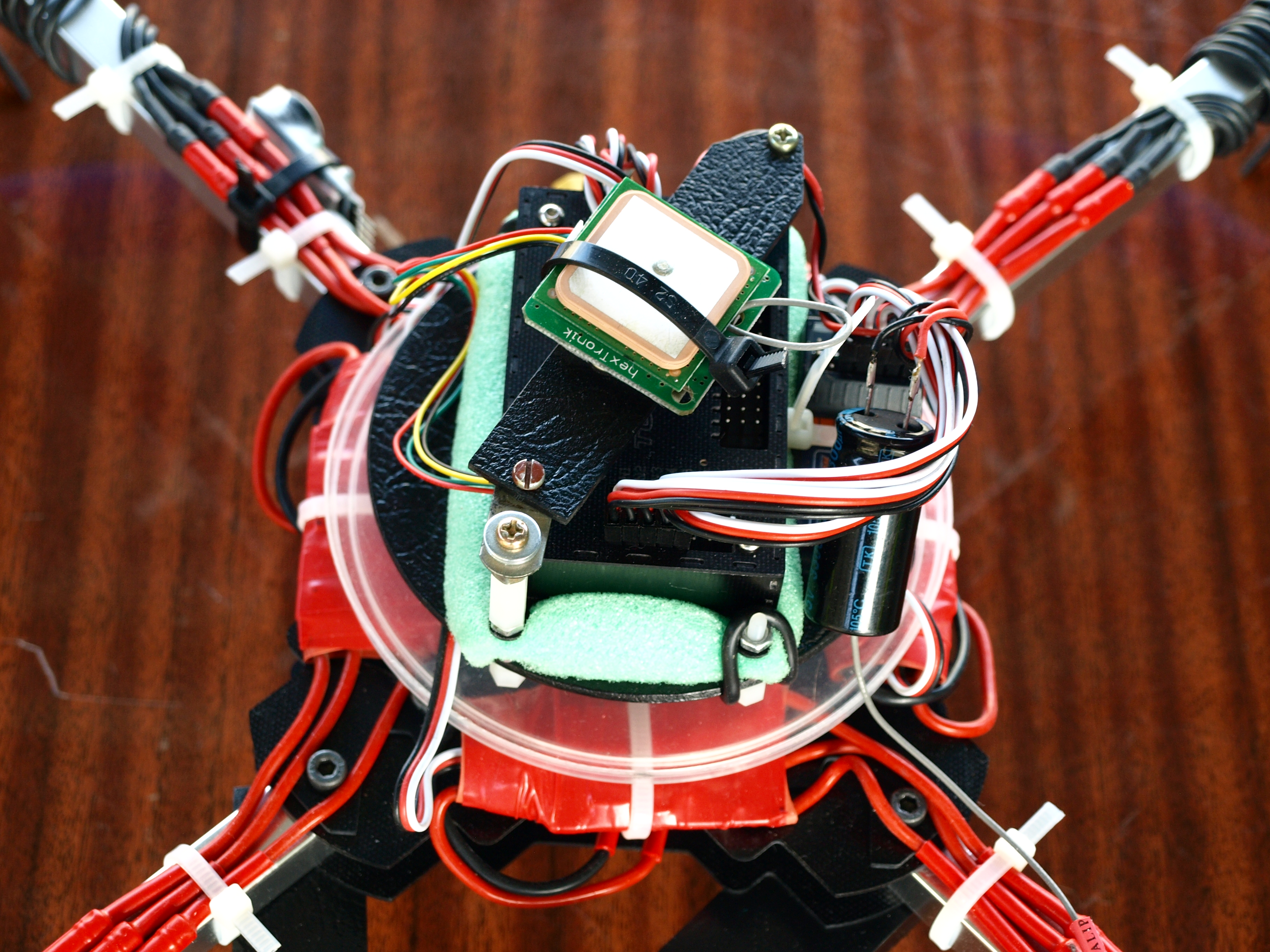
Итак, посмотрим на диаграмму с использованием виброразвязки:

Особых изменений это не принесло, однако в некоторых местах все же минимальный показатель уменьшился. В общем по этой части еще предстоит работать и экспериментировать.
Итак, автопилот обладает огромными возможностями, большим набором полетных режимов. Пока что мне удалось проверить и протестировать на практике 4 из них, это:
-Stabilize (стабилизация, как и у любого полетного контроллера);
-Position (режим удержания позиции с помощью GPS-модуля);
-Alt Hold (режим удержания высоты);
-Loiter (режим полного удержания позиции, то есть высоты и позиции одновременно).
Все режимы работали отлично на мой взгляд, я остался доволен, ниже видео с тестом режима Loiter:
Взлет в режиме Stabilize и полет в режиме Alt Hold + Simple mode (Simple mode - это такой режим, при котором вы не потеряете ориентацию "нос - корма", так как какой-бы стороной вы не повернули аппарат, он всегда будет лететь к вам, если вы тянете стик тангажа на себя, либо от вас соответственно. (Разумеется, если вы сами не меняли позицию после взлета!):
Далее видео с борта аппарата. Камеру крепил таким вот способом:

Тут также не очень доволен этим креплением, так как камера немного дрожит в некоторых случаях (некоторые видео стабилизировал YouTube), да и весит многовато, буду переделывать в будущем)
С видом на работающий двигатель:
Тут необходимо отметить один нюанс, когда полет происходит в режиме Stabilize и вам необходимо поварачивать аппарат вокруг своей оси, нужно быть предельно аккуратным, иначе можно задеть газ (стик то один) и в следствии чего потерять контроль над аппаратом, вот такой фейл произошол в связи с этим:
Однако, я выровнял аппарат и ничего серьезного не произолшо).
В будущем планирую использовать с телеметрией на 433 мГц.
Всем удачных полетов и посадок! Жду адекватной критики и комментариев!













"регуль отключил движок - отсечка по питанию"
- регули не прошитые? И так неплохо летает? Повезло. Всем советую для коптера менять стоковую прошивку на более быструю.
Если регуль на АТМеге - ставить SimonK, если на Silabs'е - ставить BLHeli.
Смена прошивки регуля позволяет полетному контроллеру быстрее реагировать на внешние возмущения. (на стоковых как правило регули реагируют с задержкой, что сносит крышу контроллеру - возникает трах с ПИДами)
уже измучался, летит плавно вперед и все тут.
2. Небольшое желе присутствует. Способ установки камеры неудачен.
3. Регули - на пайку, лишние провода - отрезать.
За статью ставлю плюс.
Вопрос - какие у вас ПИДы?
Хотя, может выйти так, что большИе пропы и больший акк дадут такое же или меньшее время полета, как в вашем нынешнем сетапе. У вас сейчас время 15 минут? Я собирал квадр весом 1300 (примерно как ваш), движки 570кв (почти как у вас), пропы карбон 15, 4S 3200 - время висения было 20-25 минут.
Пробуйте.
Что касается разъемов - скажите честно (хотя бы самому себе), вы сколько раз проводили процедуру смены регуля? Хотя бы раз после сборки меняли? Думаю - нет. И в поле вы его менять вряд ли будете. А разъемчики небось перед полетом проверяете? Пайка - это надежный и легкий по весу способ соединения движка и регуля. Захотите поменять регуль - отпаиваете провода и снимаете регуль, движки сидят на месте. Отпаяв разъемы со всех регулей и движков - получите экономию в весе 50-70 грамм. А это больше веса камеры Мёбиус (40 грамм).
Кстати, под это дело уберете аппендиксы с регуля - 7 сантиметров проводов, да помноженное на 12 штук - достаточно весомо получается тоже.
И провода от движков можно внутри луча пустить - вид будет совершенно другой!