Приветствую коллеги!
FPV полетами я начал заниматься два сезона назад, этот сезон третий.
Решил на досуге написать серию статей, которая может помочь тем, кто только что пришел в это хобби. В статьях будет отражен мой теперешний авиапарк, от простого к сложному. Эта статья про мой первый пепелац, с которым я и начал покорять небо. Так он выглядел в молодости =)
(1).1398090126084.1437337826051.prev.jpg)
SkyEasy Aerodrone
Почему именно он?
FPV полетами я начал заниматься два сезона назад, этот сезон третий.
Решил на досуге написать серию статей, которая может помочь тем, кто только что пришел в это хобби. В статьях будет отражен мой теперешний авиапарк, от простого к сложному. Эта статья про мой первый пепелац, с которым я и начал покорять небо. Так он выглядел в молодости =)
(1).1398090126084.1437337826051.jpg)
SkyEasy Aerodrone
Почему именно он?
Естественно первый самолет должен быть хорошо управляемым и стабильным в полете. При этом в силу определенных причин не хотелось брать большой самолет. Если быть до конца честным, первым как и у многих был FPV Raptor, и, как у многих, летал он мягко говоря сильно специфично... В силу недостатка опыта на тот момент, я не смог разобраться, что основная проблема Раптора - не правильный выкос двигателя. В итоге Раптор был отложен, а в последствии доведен до ума и продан, ну не лежала к нему душа как-то. А в качестве первого носителя был приобретен упомянутый выше  Готовый к полету планер Sky Easy размахом 1050мм с 4-х канальной радиоаппаратурой 2.4 ГГц (комплектация RTF, mode 1)
Готовый к полету планер Sky Easy размахом 1050мм с 4-х канальной радиоаппаратурой 2.4 ГГц (комплектация RTF, mode 1)
 Товар http://www.parkflyer.ru/product/644013/
, для простоты самолет был прозван Изя.
Товар http://www.parkflyer.ru/product/644013/
, для простоты самолет был прозван Изя.
Критерии, которым руководствовался при выборе:
- малый вес в штате, чтобы был запас для установки FPV аппаратуры;
- материал - EPO, чтобы легко и просто ремонтировался;
- умение лететь медленно, потому как пилот был чайник;
- хорошая самостабилизация;
- достаточный объем полезного простанства в фюзеляже;
- толкающая мотоустановка;
- размах крыльев 1м +-50мм, чтобы можно было носить не разбирая;
В итоге остался доволен им до невозможности.
Характеристики самолета:
- Размах крыльев 1050мм
- Длина 863мм
- Полетный вес с FPV оборудованием до 630гр. в зависимости от батареи.
- Мотор колокольчик 2730 2000KV
- Регулятор хода 18А TURNIGY Plush 18А регулятор скорости для бесколлекторных двигателей
TURNIGY Plush 18А регулятор скорости для бесколлекторных двигателей
Товар http://www.parkflyer.ru/product/4312/
(стоковый регулятор загнулся где-то на 20 полете из чего были сделаны соответствующие выводы)
- Пропеллер 7х4
- Полетное время около 15 минут
- Запас хода около 10км
- Крейсерская скорость около 40 км\ч.
Т.к. Изя официально не является платформой для FPV, то пришлось немного доработать конструкцию.
Так выглядел фюзеляж изнутри изначально:
.1398093004544.1437337981828.prev.jpg)
Для размещения оборудования поверх всего этого были вклеены две пластиковых полки для оборудования и батарей, которые оклеил сверху липучкой:

От носа через фюзеляж и хвостовую балку до самого стабилизатора вклеил карбоновую рейку квадратного сечения 3мм (ее под полками не видно) для придания кострукции дополнительной жесткости.
Часть фонаря кабины была удалена и туда было вклеено крепление для камеры, а впоследствии для пан-тилта.
Так самолет выглядел когда впервые полетел в качестве FPV носителя, тогда еще без автопилота и пан-тилта для камеры:

Теперь перейдем к электронной начинке:
- Камера OSD Menu 650TVL HD SHARP CCD Starlight WDR Board Camera 2.8mm
- Видеопередатчик BEV 1.3G 400mW transmitter for FPV (до этого летал на передатчике 200mW, в этом сезоне решил немного проапгрейдиться)
- Low pass Filter LPF1200/LPF1400 (включается между видео передатчиком и антенной, глушит частоты больше 1,4ГГц, чтобы исключить негативное влияние на РУ 2,4ГГц)
- Антенна квадрифилярная 1.3ГГц круговой поляризации
- Микрофон Mini Microphone CCTV Security
-.jpg) Автопилот Arkbird с OSD V3.1020
Автопилот Arkbird с OSD V3.1020
Товар http://www.parkflyer.ru/product/691352/
Arkbird
-.jpg) FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV)
FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV)
Товар http://www.parkflyer.ru/product/101891/
FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV)
- "Пищалка" для поисков модели в траве от Hobby King
"Пищалка" для поисков модели в траве от Hobby King
Товар http://www.parkflyer.ru/product/102775/
для поиска
-.jpg) TURNIGY 3A UBEC с помехоподавлением
TURNIGY 3A UBEC с помехоподавлением
Товар http://www.parkflyer.ru/product/4319/
TURNIGY 3A UBEC
- Видео батарея 11.1В 3S 360mAh
- Ходовая батарея 7.4В 2S 1000-1300mAh
Первое время летал без автопилота, пару раз чуть не погубил самолет из-за отказов видеотракта, но нервы все же дороже, потому обзавелся и ничуть не жалею. ArkBird прост в настройке, умеет управлять оборотами двигателя и вполне адекватен, есть правда один серьезный минус: при срабатывании Faile Safe (а именно это является для автопилота сигналом возвращать самолет домой) на земле или на минимальной высоте, при том, что самолет удален от базы больше чем на 30 метров, ArkBird пытается вести самолет домой, даже если тот, предположим, нештатно приземлился вдалеке от базы. Эту нехорошую его особенность разработчик исправлять почему-то не спешит. Набор фунций достаточно стандартен для подобных устройств: гиро-режим, режим полной стабилизации с поддержкой высоты и курса, режим полета по точкам, режим автоматического возврата на базу. Поучаствовать в обсуждении этого автопилота можно Автопилот Arkbird с OSD V3.1020
Товар http://www.parkflyer.ru/product/691352/
или здесь.
Что касается выбора камеры - это был компромисс между дорогим и всеми признанными Pixim SeaWolf 690TVL (которые кстати довольно тяжелые и громоздкие) и чем-то дешевым, но с мерзкой картинкой. Всем начинающим могу посоветовать не экономить 20 у.е. разницы и обязательно брать камеру с технологией WDR, что позволит летать при сложном освещении (например низкое солнце) и при этом видеть объекты на земле, а не черное пространство без ориентиров.
Микрофон - много копий поломано на форумах о необходимости иметь микрофон на борту, я стопроцентный сторонник его наличия, т.к. это идеальный источник информации о состоянии двигателя. При этом вес и энергопотребление минимальны, так что экономить на нем не стоит.
Для радиоуправления диапазон 2.4ГГц был выбран по нескольким причинам. Во-первых самолет изначально планировался под "близко и низко", поэтому дальнобойная система ему не сильно нужна. Во-вторых, учитывая не большие размеры пепелаца, грамотно разместить на нем антенну на 433МГц будет проблематично ввиду ее не маленьких размеров. Что касается влияния видео передатчика 1.3ГГц на приемник РУ: при использовании LowPass фильтра никаких проблем выявлено не было.
На данный момент внутренности самолета выглядят так:
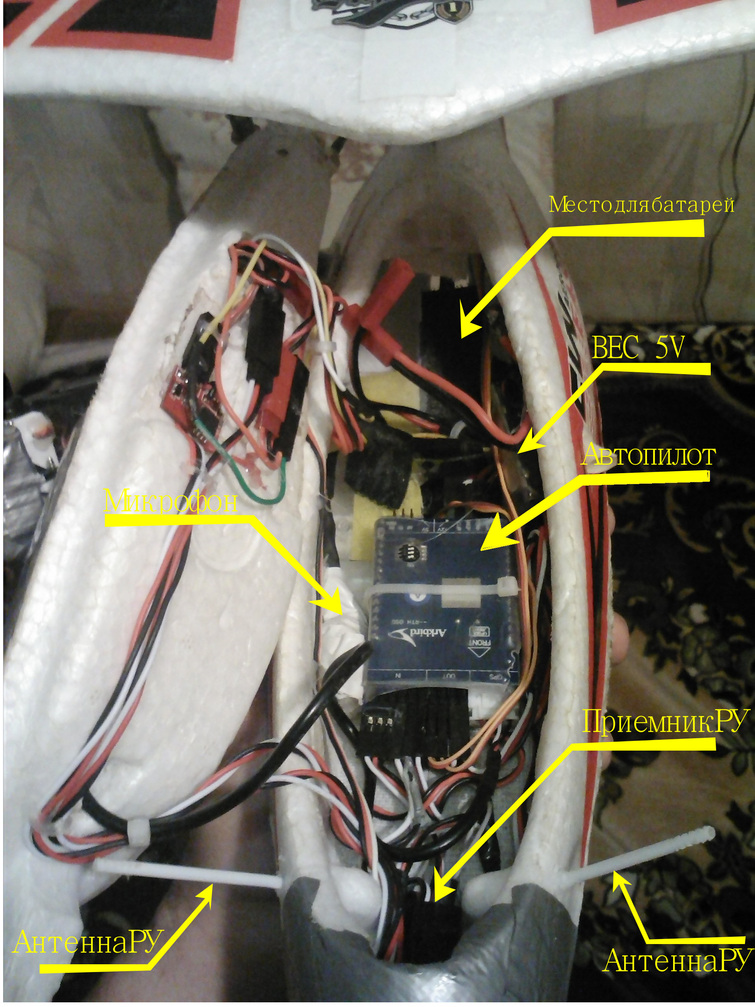
Достаточно удачно получилось сделать развесовку, батареи устанавливаются как раз в районе центра тяжести самолета, поэтому центровка не зависит от их веса. В основном сейчас летаю на 1300mAh 2S, но запас по грузоподъемности еще остался.
Наружность самолета выглядит так:

Как видите, пришлось пожертвовать фигуркой пилота, его место занял приемник GPS от автопилота ArkBird.
Радиоуправление на земле постоено на базе Turnigi 9X (слегка доработанной, Внедрение джойстика от PS2 в аппаратуру Turnigy 9X+116
Внедрение джойстика от PS2 в аппаратуру Turnigy 9X+116
28 ноября 2013 года в 17:22 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/3131/
, для удобного управления пан-тилтом) с модулем  FrSky DHT 8-ми канальный DIY передатчик с телеметрией
FrSky DHT 8-ми канальный DIY передатчик с телеметрией
Товар http://www.parkflyer.ru/product/103811/
и ретранслятора, который описывал  Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.+44
Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.+44
24 октября 2013 года в 11:39 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2695/
. Дальнобойность ретранслятора без бустрера - до 2,5км, вполне достаточно для "близко и низко". Для полетов подальше можно использовать бустер, почитать на эту тему можно тут.
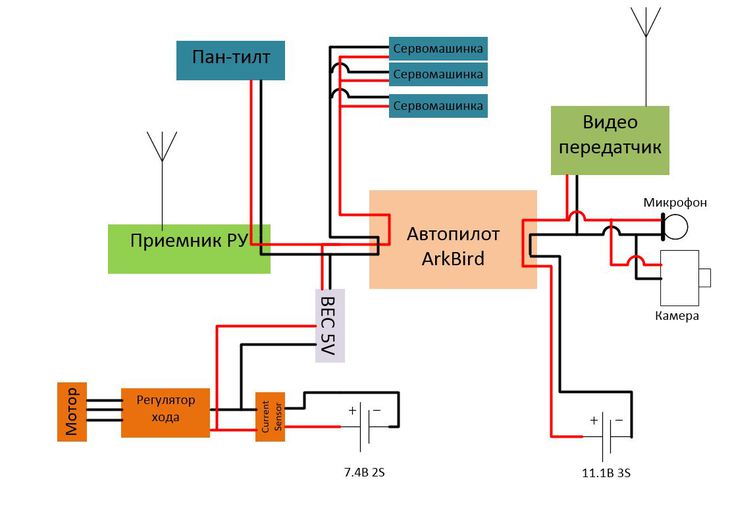
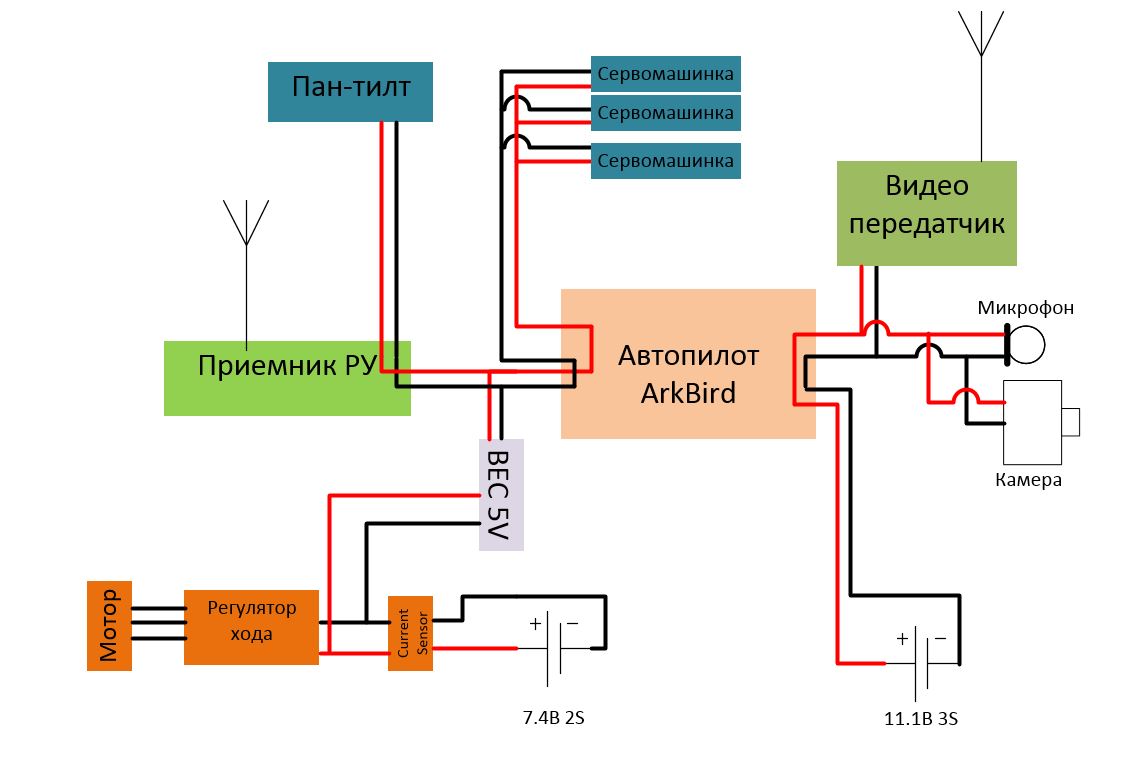
При компоновке придерживался приципа раздельного питания. Видеотракт питается от отдельной батареи Аккумуляторы Rhino 360мАч 3S 11.1В 20C Li-po
Аккумуляторы Rhino 360мАч 3S 11.1В 20C Li-po
Товар http://www.parkflyer.ru/product/7302/
, которой хватает на 50мин. работы (напомню, полетное время около 15 минут), вес ее при этом составляет всего 33гр. - т.е. совсем не значительный. В результате получаем страховку от потери видео сигнала, что вполне вероятно может случиться при просадке ходовой батареи, от которой питается двигатель. Да и ко всему прочему у данного пепелаца ходовая батарея 2S 7.4В, таким образом ее напряжения не достаточно для питания видеотракта, которому необходимо 12В, можно конечно использовать повышающий DC-DC конвертер, но надежность системы из-за этого только пострадает. Ну и кроме всего прочего: отдельное питание видео тракта - простейший и самый надежный способ избавиться от помех по питанию, генераторами которых являются регулятор хода и сервомашинки.
Также вместо встроенного в регулятор BEC использовал дискретный BEC на 3А (красный провод из трехпинового разъема от регулятора был извлечен и заизолирован), от которого запитал бортовое оборудование (сервы, приемник, автопилот), т.к. нередки случаи потери бортового питания вследствие проблем с регулятором скорости, вплоть до пробоя встроенного BEC, когда тот начинает гнать на борт полное напряжение батареи не стабилизируя его. Так же нередки случаи отключения встроенных BEC из-за перегрева. Учитывая все вышеперечисленное, дискретный BEC - хороший способ повысить надежность аппарата, даже если регулятор скорости погибнет, есть шанс спланировать, т.к. управление продолжит функционировать..
Схема питания электроники:
Наземную станцию описывать пока не буду - это тема для отдельной статьи.
В целом, самолет получился удачный. Для полетов близко и низко очень хороший вариант, но надо учитывать, что придется немного доработать.
Дополнение по просьбам читателей:
Летаю по телевизору 17", очки пробовал - не понравилось, может потому, что HeadPlay не дают такого ощущения погружения, как те же FatShark, не знаю, их не пробовал, но было ощущение, что сидишь в темной комнате и смотришь на монитор, который от тебя на расстоянии метр. Задержки ощутимые тоже не улучшали впечатления. Опять же полет по телевизору позволяет быстро переключиться с полета от первого лица, на полет от третьего. Сажаю в основном от третьего лица, за исключением нештатных случаев, когда до базы еще далеко, но такое было всего пару раз, не дотягивал метров 50 всего-лишь, самолет цел, так что сажать от первого лица вполне реально. Есть товарищи, которые исключительно от первого лица предпочитают взлетать и садиться, но для этого хорошая полоса нужна, а у меня такой к сожалению в ближайшем доступе нет. Ну тут уж на вкус и цвет, кому-то полет в очках кажется лучше, кому-то по телевизору\монитору.
Что касается тех самых мелочей:
- при полете на значительные расстояния, для возможностей самолета, само собой лететь надо против ветра, чтобы по ветру домой возвращаться, но не забывать, что в зависимости от высоты полета направление ветра может меняться, поэтому постоянно контролировать это, то есть мониторить свою скорость по GPS, естественно надо знать крейсерскую скорость своего пепелаца и на ее основе прикидывать, что там с ветром происходит. Опять же настраивая автопилот учитывать скорость ветра и крейсерскую скорость пепелаца, чтобы при автоматическом пилотировании по ветру не довести самолет до сваливания - это касается автопилотов не имеющих датчика воздушной скорости, например тот самый ArkBird. Посему при ветре, скорость которого больше половины крейсерской скорости пепелаца стараюсь не летать вообще.
- при полетах на высоту не забывать соответствующим образом ориентировать антенны, как на земле, так и на аппарате. В основном это касается антенн РУ, которые в большинстве своем диполи. Вообще стоит поизучать диграммы направленности различных типов антенн, гуглится эта информация без проблем.
- для полетов в пределах 2км вполне достаточно будет той конфигурации, которую описал в этой статье. Более мощный передатчик на видео ставить наверное не стоит. Что касается управления, тот же FrSky, если управление реализовать через ретранслятор, вполне пробивает 2,5км. Вообще ретранслятор сделать очень рекомендую, дальнобойная антенна на пульте - извращение по-определению.
В этом году сезон FPV открывал тоже полетами на Изе. Уже практически традиция =) ну и навыки после зимы на нем восстанавливать - самое то.
Вот небольшая нарезка видео с курсовой камеры, с открытия сезона в этом году (YouTube видео подпортил солидно, в оригинале разрешение 720х576, зачем оно его в 360р ужало - загадка):
Прошлогодняя запись на HD камеру с борта:
Свежее видео, полет на 4км удаления. Автопилот заменен на EagleTree OSD Pro, гадость та еще, но Арк понадобился для новых проектов.
Спасибо за внимание! Всем мягких посадок и летной погоды!
Продолжение следует.
З.Ы. Если у кого-то возникли вопросы по существу - задавайте, не стесняйтесь, всем постараюсь ответить.
==================================================================
Мои предыдущие статьи:
Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.+44
24 октября 2013 года в 11:39 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2695/
Увеличиваем максимальный угол отклонения стандартной сервомашинки.+60
17 ноября 2013 года в 16:56 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2958/
Внедрение джойстика от PS2 в аппаратуру Turnigy 9X+116
28 ноября 2013 года в 17:22 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/3131/
Про выкладывание видео YouTube в ленту и т.п.+39
18 апреля 2014 года в 22:50 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/7755/
Готовый к полету планер Sky Easy размахом 1050мм с 4-х канальной радиоаппаратурой 2.4 ГГц (комплектация RTF, mode 1) Товар http://www.parkflyer.ru/product/644013/
, для простоты самолет был прозван Изя.Критерии, которым руководствовался при выборе:
- малый вес в штате, чтобы был запас для установки FPV аппаратуры;
- материал - EPO, чтобы легко и просто ремонтировался;
- умение лететь медленно, потому как пилот был чайник;
- хорошая самостабилизация;
- достаточный объем полезного простанства в фюзеляже;
- толкающая мотоустановка;
- размах крыльев 1м +-50мм, чтобы можно было носить не разбирая;
В итоге остался доволен им до невозможности.
Характеристики самолета:
- Размах крыльев 1050мм
- Длина 863мм
- Полетный вес с FPV оборудованием до 630гр. в зависимости от батареи.
- Мотор колокольчик 2730 2000KV
- Регулятор хода 18А
TURNIGY Plush 18А регулятор скорости для бесколлекторных двигателей Товар http://www.parkflyer.ru/product/4312/
(стоковый регулятор загнулся где-то на 20 полете из чего были сделаны соответствующие выводы)- Пропеллер 7х4
- Полетное время около 15 минут
- Запас хода около 10км
- Крейсерская скорость около 40 км\ч.
Т.к. Изя официально не является платформой для FPV, то пришлось немного доработать конструкцию.
Так выглядел фюзеляж изнутри изначально:
.1398093004544.1437337981828.jpg)
Для размещения оборудования поверх всего этого были вклеены две пластиковых полки для оборудования и батарей, которые оклеил сверху липучкой:

От носа через фюзеляж и хвостовую балку до самого стабилизатора вклеил карбоновую рейку квадратного сечения 3мм (ее под полками не видно) для придания кострукции дополнительной жесткости.
Часть фонаря кабины была удалена и туда было вклеено крепление для камеры, а впоследствии для пан-тилта.
Так самолет выглядел когда впервые полетел в качестве FPV носителя, тогда еще без автопилота и пан-тилта для камеры:

Теперь перейдем к электронной начинке:
- Камера OSD Menu 650TVL HD SHARP CCD Starlight WDR Board Camera 2.8mm
- Видеопередатчик BEV 1.3G 400mW transmitter for FPV (до этого летал на передатчике 200mW, в этом сезоне решил немного проапгрейдиться)
- Low pass Filter LPF1200/LPF1400 (включается между видео передатчиком и антенной, глушит частоты больше 1,4ГГц, чтобы исключить негативное влияние на РУ 2,4ГГц)
- Антенна квадрифилярная 1.3ГГц круговой поляризации
- Микрофон Mini Microphone CCTV Security
-
Автопилот Arkbird с OSD V3.1020 Товар http://www.parkflyer.ru/product/691352/
Arkbird-
FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV) Товар http://www.parkflyer.ru/product/101891/
FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV)-
"Пищалка" для поисков модели в траве от Hobby King Товар http://www.parkflyer.ru/product/102775/
для поиска-
TURNIGY 3A UBEC с помехоподавлением Товар http://www.parkflyer.ru/product/4319/
TURNIGY 3A UBEC- Видео батарея 11.1В 3S 360mAh
- Ходовая батарея 7.4В 2S 1000-1300mAh
Первое время летал без автопилота, пару раз чуть не погубил самолет из-за отказов видеотракта, но нервы все же дороже, потому обзавелся и ничуть не жалею. ArkBird прост в настройке, умеет управлять оборотами двигателя и вполне адекватен, есть правда один серьезный минус: при срабатывании Faile Safe (а именно это является для автопилота сигналом возвращать самолет домой) на земле или на минимальной высоте, при том, что самолет удален от базы больше чем на 30 метров, ArkBird пытается вести самолет домой, даже если тот, предположим, нештатно приземлился вдалеке от базы. Эту нехорошую его особенность разработчик исправлять почему-то не спешит. Набор фунций достаточно стандартен для подобных устройств: гиро-режим, режим полной стабилизации с поддержкой высоты и курса, режим полета по точкам, режим автоматического возврата на базу. Поучаствовать в обсуждении этого автопилота можно
Автопилот Arkbird с OSD V3.1020 Товар http://www.parkflyer.ru/product/691352/
или здесь.Что касается выбора камеры - это был компромисс между дорогим и всеми признанными Pixim SeaWolf 690TVL (которые кстати довольно тяжелые и громоздкие) и чем-то дешевым, но с мерзкой картинкой. Всем начинающим могу посоветовать не экономить 20 у.е. разницы и обязательно брать камеру с технологией WDR, что позволит летать при сложном освещении (например низкое солнце) и при этом видеть объекты на земле, а не черное пространство без ориентиров.
Микрофон - много копий поломано на форумах о необходимости иметь микрофон на борту, я стопроцентный сторонник его наличия, т.к. это идеальный источник информации о состоянии двигателя. При этом вес и энергопотребление минимальны, так что экономить на нем не стоит.
Для радиоуправления диапазон 2.4ГГц был выбран по нескольким причинам. Во-первых самолет изначально планировался под "близко и низко", поэтому дальнобойная система ему не сильно нужна. Во-вторых, учитывая не большие размеры пепелаца, грамотно разместить на нем антенну на 433МГц будет проблематично ввиду ее не маленьких размеров. Что касается влияния видео передатчика 1.3ГГц на приемник РУ: при использовании LowPass фильтра никаких проблем выявлено не было.
На данный момент внутренности самолета выглядят так:

Достаточно удачно получилось сделать развесовку, батареи устанавливаются как раз в районе центра тяжести самолета, поэтому центровка не зависит от их веса. В основном сейчас летаю на 1300mAh 2S, но запас по грузоподъемности еще остался.
Наружность самолета выглядит так:

Как видите, пришлось пожертвовать фигуркой пилота, его место занял приемник GPS от автопилота ArkBird.
Радиоуправление на земле постоено на базе Turnigi 9X (слегка доработанной,
Внедрение джойстика от PS2 в аппаратуру Turnigy 9X+11628 ноября 2013 года в 17:22 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/3131/
, для удобного управления пан-тилтом) с модулем FrSky DHT 8-ми канальный DIY передатчик с телеметрией Товар http://www.parkflyer.ru/product/103811/
и ретранслятора, который описывал Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.+4424 октября 2013 года в 11:39 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2695/
. Дальнобойность ретранслятора без бустрера - до 2,5км, вполне достаточно для "близко и низко". Для полетов подальше можно использовать бустер, почитать на эту тему можно тут.При компоновке придерживался приципа раздельного питания. Видеотракт питается от отдельной батареи
Аккумуляторы Rhino 360мАч 3S 11.1В 20C Li-po Товар http://www.parkflyer.ru/product/7302/
, которой хватает на 50мин. работы (напомню, полетное время около 15 минут), вес ее при этом составляет всего 33гр. - т.е. совсем не значительный. В результате получаем страховку от потери видео сигнала, что вполне вероятно может случиться при просадке ходовой батареи, от которой питается двигатель. Да и ко всему прочему у данного пепелаца ходовая батарея 2S 7.4В, таким образом ее напряжения не достаточно для питания видеотракта, которому необходимо 12В, можно конечно использовать повышающий DC-DC конвертер, но надежность системы из-за этого только пострадает. Ну и кроме всего прочего: отдельное питание видео тракта - простейший и самый надежный способ избавиться от помех по питанию, генераторами которых являются регулятор хода и сервомашинки.Также вместо встроенного в регулятор BEC использовал дискретный BEC на 3А (красный провод из трехпинового разъема от регулятора был извлечен и заизолирован), от которого запитал бортовое оборудование (сервы, приемник, автопилот), т.к. нередки случаи потери бортового питания вследствие проблем с регулятором скорости, вплоть до пробоя встроенного BEC, когда тот начинает гнать на борт полное напряжение батареи не стабилизируя его. Так же нередки случаи отключения встроенных BEC из-за перегрева. Учитывая все вышеперечисленное, дискретный BEC - хороший способ повысить надежность аппарата, даже если регулятор скорости погибнет, есть шанс спланировать, т.к. управление продолжит функционировать..
Схема питания электроники:
Наземную станцию описывать пока не буду - это тема для отдельной статьи.
В целом, самолет получился удачный. Для полетов близко и низко очень хороший вариант, но надо учитывать, что придется немного доработать.
Дополнение по просьбам читателей:
Летаю по телевизору 17", очки пробовал - не понравилось, может потому, что HeadPlay не дают такого ощущения погружения, как те же FatShark, не знаю, их не пробовал, но было ощущение, что сидишь в темной комнате и смотришь на монитор, который от тебя на расстоянии метр. Задержки ощутимые тоже не улучшали впечатления. Опять же полет по телевизору позволяет быстро переключиться с полета от первого лица, на полет от третьего. Сажаю в основном от третьего лица, за исключением нештатных случаев, когда до базы еще далеко, но такое было всего пару раз, не дотягивал метров 50 всего-лишь, самолет цел, так что сажать от первого лица вполне реально. Есть товарищи, которые исключительно от первого лица предпочитают взлетать и садиться, но для этого хорошая полоса нужна, а у меня такой к сожалению в ближайшем доступе нет. Ну тут уж на вкус и цвет, кому-то полет в очках кажется лучше, кому-то по телевизору\монитору.
Что касается тех самых мелочей:
- при полете на значительные расстояния, для возможностей самолета, само собой лететь надо против ветра, чтобы по ветру домой возвращаться, но не забывать, что в зависимости от высоты полета направление ветра может меняться, поэтому постоянно контролировать это, то есть мониторить свою скорость по GPS, естественно надо знать крейсерскую скорость своего пепелаца и на ее основе прикидывать, что там с ветром происходит. Опять же настраивая автопилот учитывать скорость ветра и крейсерскую скорость пепелаца, чтобы при автоматическом пилотировании по ветру не довести самолет до сваливания - это касается автопилотов не имеющих датчика воздушной скорости, например тот самый ArkBird. Посему при ветре, скорость которого больше половины крейсерской скорости пепелаца стараюсь не летать вообще.
- при полетах на высоту не забывать соответствующим образом ориентировать антенны, как на земле, так и на аппарате. В основном это касается антенн РУ, которые в большинстве своем диполи. Вообще стоит поизучать диграммы направленности различных типов антенн, гуглится эта информация без проблем.
- для полетов в пределах 2км вполне достаточно будет той конфигурации, которую описал в этой статье. Более мощный передатчик на видео ставить наверное не стоит. Что касается управления, тот же FrSky, если управление реализовать через ретранслятор, вполне пробивает 2,5км. Вообще ретранслятор сделать очень рекомендую, дальнобойная антенна на пульте - извращение по-определению.
В этом году сезон FPV открывал тоже полетами на Изе. Уже практически традиция =) ну и навыки после зимы на нем восстанавливать - самое то.
Вот небольшая нарезка видео с курсовой камеры, с открытия сезона в этом году (YouTube видео подпортил солидно, в оригинале разрешение 720х576, зачем оно его в 360р ужало - загадка):
Прошлогодняя запись на HD камеру с борта:
Свежее видео, полет на 4км удаления. Автопилот заменен на EagleTree OSD Pro, гадость та еще, но Арк понадобился для новых проектов.
Спасибо за внимание! Всем мягких посадок и летной погоды!
Продолжение следует.
З.Ы. Если у кого-то возникли вопросы по существу - задавайте, не стесняйтесь, всем постараюсь ответить.
==================================================================
Мои предыдущие статьи:
Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.+4424 октября 2013 года в 11:39 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2695/
Увеличиваем максимальный угол отклонения стандартной сервомашинки.+6017 ноября 2013 года в 16:56 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/2958/
Внедрение джойстика от PS2 в аппаратуру Turnigy 9X+11628 ноября 2013 года в 17:22 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/3131/
Про выкладывание видео YouTube в ленту и т.п.+3918 апреля 2014 года в 22:50 | Евгений Кочетков Большие Вяземы, Московская Обл
Статья http://www.parkflyer.ru/blogs/view_entry/7755/













Для клевера то же самое.
Что касется той антенны, что в этой статье на фото - я ее покупал, как такая считается - не знаю.
1. Центральная серва привода элеронов вынута, её место занял GPS-приёмник. В крыльях прорезаны окна под две HXT500, соответственно, появился режим флапперонов. Там же разместил ПВД, трубки от него идут в фюзеляж (это не лучшее решение и по расположению ПВД и по месту установки дифференциального датчика давления, но "так склалось" :) ).
2. Сервы РН и РВ вынесены на хвостовую балку, их тяги заменены на бамбуковые. Опять же, лучше было вынести в основание киля, но - "так склалось".
3. В крыло же, после некоторых мучений, установлен гироскоп/акселерометр/магнетометр - в фюзелеяже помехи от кучи проводов, которые идут в носовую часть.
4. За колесом установлен ультразвуковой высотомер SR04, отверстия для датчиков просверлены алюминиевой трубкой.
5. Установлен двухпроцессорный полётный контроллер собственной конструкции (не очень удачной :)) на базе модифицированного MultiWii (добавлены:
а) поддержка двух вольтметров и двух амперметров - для случая раздельного питания основной электроники и FPV или отдельной ходовой батареи
б) БАНО со стробами и посадочными фарами - чисто для красоты
в) поддержка датчика влажности SHT21 и, теоретически, дифференциального датчика давления MS4525DO (пока не пришёл, т.ч. не проверено) - для точного определения воздушной скорости
г) обработка RSSI приёмника FrSky D8R-II (анализируется частота мигания светодиода)
д) передача всей телеметрии через соответствующий функционал приёмника FrSky; используется собственный протокол поверх штатного, т.к. передаются совершенно другие показатели, да и битые пакеты попадались в количестве около 3%, т.ч. пришлось добавить CRC8). На земле расшифровка и отображение телеметрии делается на самодельном же девайсе с двумя ЖК-экранами 20*4 символов.
- вся эта байда, а, особенно, куча подходящих и исходящих проводов заняла всё свободное место примерно от оси колеса до начала штатного батарейного отсека.
6. В штатный батарейный отсек установлен приёмник FrSky D8R-II (вошёл идеально), его антенны выведены через две палочки от чупачупсов (не реклама :)) по бокам носовой части фюзеляжа.
7. Пищалку я установил прямо в стенку фюзеляжа, прорезав отверстие 9мм трубочкой от антенны (диаметр хоббикинговской пищалки - 11мм, но трубочки большего диаметра у меня не было, впрочем, с применением небольшой силы пищалку я туда таки загнал).
8. Для батареи вырезана полка из куста стеклотекстолита 0.5мм (толщина недостаточна, гнётся, хотя тяжелее делать тоже не хочу), батарея крепится липучками 3M для картин (держат железно в горизонтальном направлении) и, поперёк, - стяжкой из липучки (не знаю, как это назвать, "у них" это называется Velcro strap), которая не даёт батарее подпрыгивать на полке а липучкам 3M - даже минимального шанса расстегнуться.
9. Куплена небольшая кучка разных подходящих моторов (от 1700 до 3000kv), пропеллеров (от 7*4 до 7*6) и батарей (2S и 3S разной ёмкости), хочу поэкспериментировать с подбором оптимальной ВМГ. Регулятор заменён Turnigy Dlux 30A.
Надеюсь достигнуть полётной готовности к майским, там выложу фоточки.
Мне кажется когда закончите проект - обязательно стоит написать статью!
Если есть желание пообщаться, поделиться опытом - буду очень рад.
"нередки случаи потери бортового питания вследствие проблем с регулятором скорости, вплоть до пробоя встроенного BEC, когда тот начинает гнать на борт" А говорили же на рцдизайне-защищай регуль от влаги, даже если и летаешь в идеальных условиях. Нет,послал всех. А регули горят)))Молодец,советуй дальше.
п.с. За два сезона кроме полётов блинчиком больше ничего не освоил?)))
Микрофон записан от видео-батареи параллельно камере и передатчика.
Скажите пожалуйста - как вы крепите липучку к EPO - циакрином? У меня есть липучка с самоклеящимся слоем, но практика показывает, что эта "самоклейка" нихрена не держит. Первое-второе отдирание акка от липучки - и Фсё, она отпадывает. От ЛЮБОЙ поверхности (а на ЕРО наверное вообще не прилипнет). Особенно на морозе.
И ещё вопрос - сам видеокомплект (камера-передатчик-OSD) - у вас в единичном экземпляре? То есть "в боевой готовности" у вас один борт, или...?
Еще хотелось бы что-нибудь почитать из серии "тактика ФПВ-полетов". Например такие казалось бы простые и элементарные вещи, как направление полета против ветра, чтобы потом было легче долететь домой. Если несложно, дополните статью, или в ответе на коммент напишите что-нибудь о самих полетах. Например - как взлетаете (в очках или очки надеваете после взлета), как посадка - любые мелочи про сами полеты.
Этим летом я буду активно осваивать ФПВ. Сначала на квадрике (ну люблю я их), затем на ИзиСтаре. Цель - за лето научиться летать на 2 километра и слетать как можно выше вверх. За зиму напокупал разного оборудования (и даже бустер на РУ), сейчас ставлю потихоньку на борт.
Липучки использую в основном без самоклеящегося слоя, клею циакрином (кстати те,которые самоклеящиеся, если отрывались, подклеивал термоклеем из пистолета, держит мертво), т.к. вы абсолютно правы, самоклейка не держит ни хрена, особенно если то, на что она наклеена нагревается, аккумулятор например.
Комплектов камера\передатчик\осд у меня на каждый борт по отдельному. Тоже по-первости думал к примеру камеру переносить с борта на борт по необходимости, потом понял, что неудобно и много времени занимает. Автопилот при каждом таком переносе перекалибровывать и перенастраивать приходится, камеру монтировать тоже то еще развлечение, а я ленивый если честно =) Сейчас в состоянии RTF имею 2 пепелаца, еще 2 в процессе сборки, на каждый начинка отдельная.
Насчет тактик ФПВ почитать можно здесь и здесь. Ну и вообще эту ветку, там много интересного.
Летаю по телевизору 17", очки пробовал - не понравилось, может потому, что HeadPlay не дают такого ощущения погружения, как те же FatShark, не знаю, их не пробовал, но было ощущение, что сидишь в темной комнате и смотришь на монитор, который от тебя на расстоянии метр. Задержки ощутимые тоже не улучшали ощущений. Опять же полет по телевизору позволяет быстро переключиться с полета от первого лица, на полет от третьего. Сажаю в основном от третьего лица, за исключением нештатных случаев, когда до базы еще далеко, но такое было всего пару раз, не дотягивал метров 50 всего-лишь, самолет цел, так что сажать от первого лица вполне реально. Есть товарищи, которые исключительно от первого лица предпочитают взлетать и садиться, но для этого хорошая полоса нужна, а у меня такой к сожалению в ближайшем доступе нет. Ну тут уж на вкус и цвет, кому-то полет в очках кажется лучше, кому-то по телевизору\монитору.
Что касается тех самых мелочей:
- при полете на значительные расстояния, для возможностей самолета, само собой лететь надо против ветра, чтобы по ветру домой возвращаться, но не забывать, что в зависимости от высоты полета направление ветра может меняться, поэтому постоянно контролировать это, то есть мониторить свою скорость по GPS, естественно надо знать крейсерскую скорость своего пепелаца и на ее основе прикидывать что там с ветром происходит. Опять же настраивая автопилот учитывать скорость ветра и крейсерскую скорость пепелаца, чтобы при автоматическом пилотировании по ветру не довести самолет до сваливания - это касается автопилотов не имеющих датчика воздушной скорости, например ArkBird. Посему при ветре, скорость которого больше половины крейсерской скорости пепелаца стараюсь не летать вообще.
- при полетах на высоту не забывать соответствующим образом ориентировать антенны, как на земле, так и на аппарате. В основном это касается антенн РУ, которые в большинстве своем диполи. Вообще стоит поизучать диграммы направленности различных типов антенн, гуглится эта информация без проблем.
- для полетов в пределах 2км вполне достаточно будет той конфигурации, которую описал в этой статье. Более мощный передатчик на видео ставить наверное не стоит. Что касается управления, тот же FrSky, если управление реализовать через ретранслятор, вполне пробивает 2,5км. Вообще ретранслятор сделать очень рекомендую, дальнобойная антенна на пульте - извращение по-определению.
"сколько ФПВ комплектов" - тоже прихожу к мнению, что надо озаботиться вторым видеопередатчиком и второй курсовой камерой. У меня одна леталка - будет квадрик, другая - Изистар.
Еще раз спасибо.
Буду ждать продолжения ...
+
А так, спасибо, хорошо написано, пригодится.
Ограничение снял.