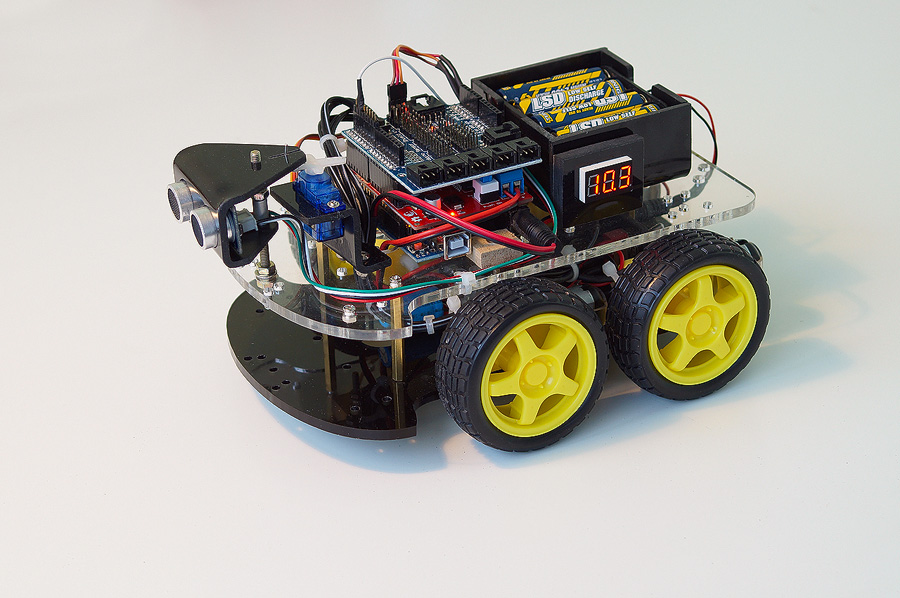
Актуальность данной темы состоит в том, что в настоящее время роботы способны заменить человека в самых различных средах, будь то промышленная, военная, медицинская индустрия и т.д. Роботы могут выполнять за человека различные виды работ, полностью или частично заменить человеческий труд. Эти машины неприхотливы к условиям труда, им не нужно платить заработную плату, они могут работать без перерывов и отпусков, так же способны выполнять рутинную работу.
Цель: создание механической руки, способной выполнять различные действия с предметами, а именно: перемещать по горизонтали и по вертикали.
Задачи:
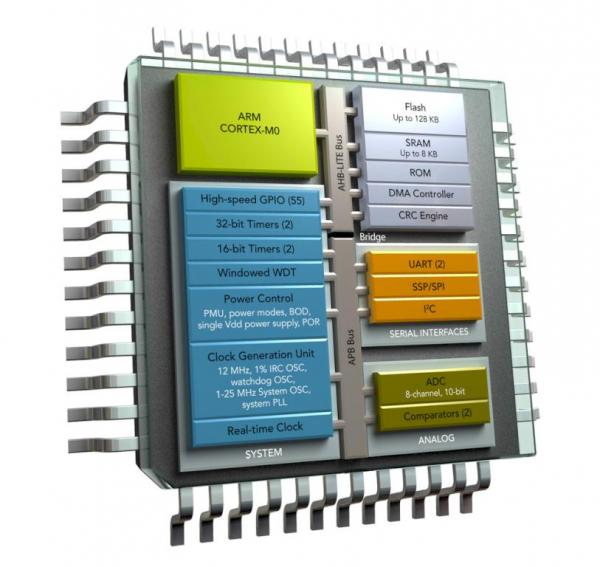
• Ознакомиться с системами управления роботов.
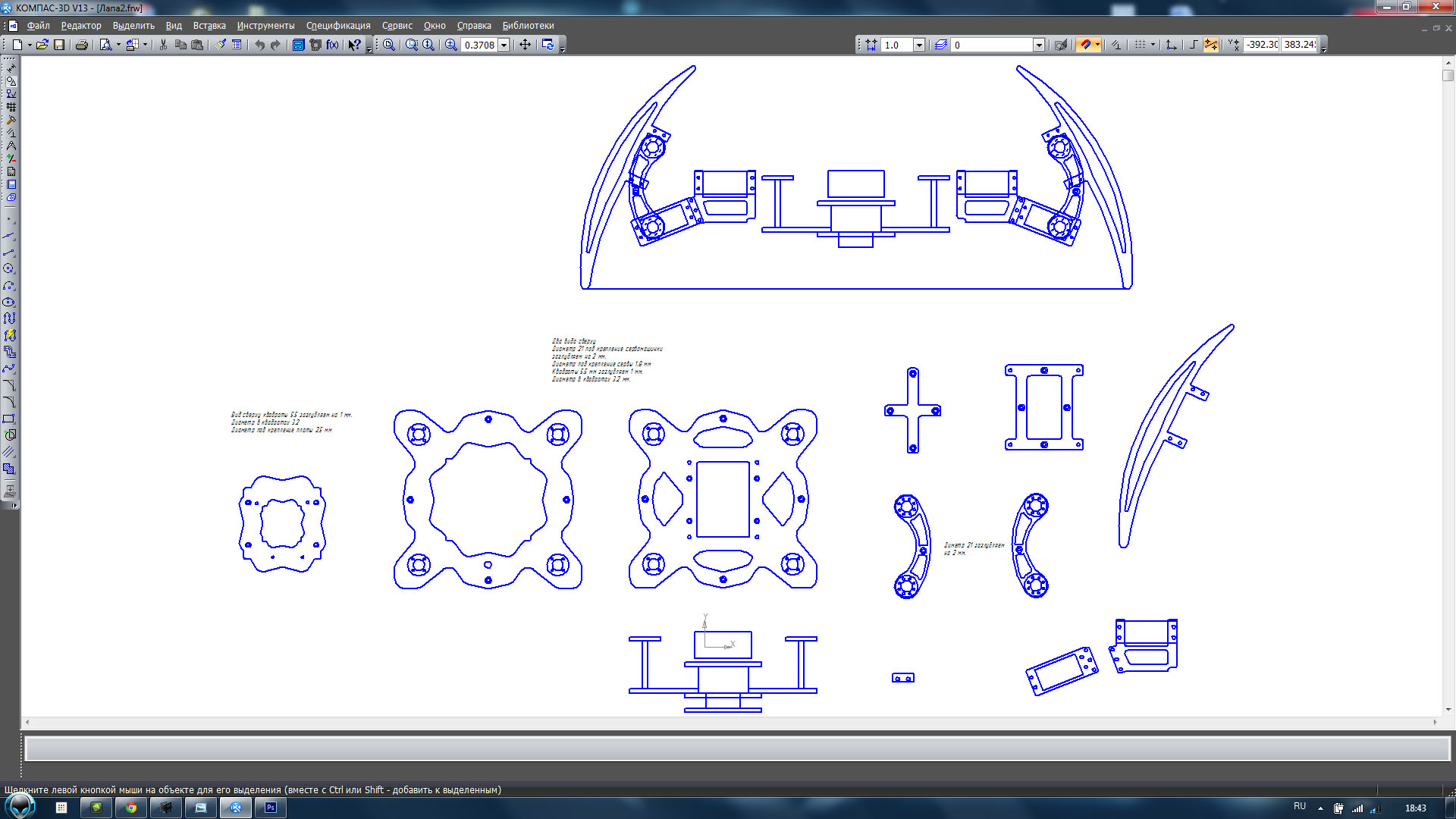
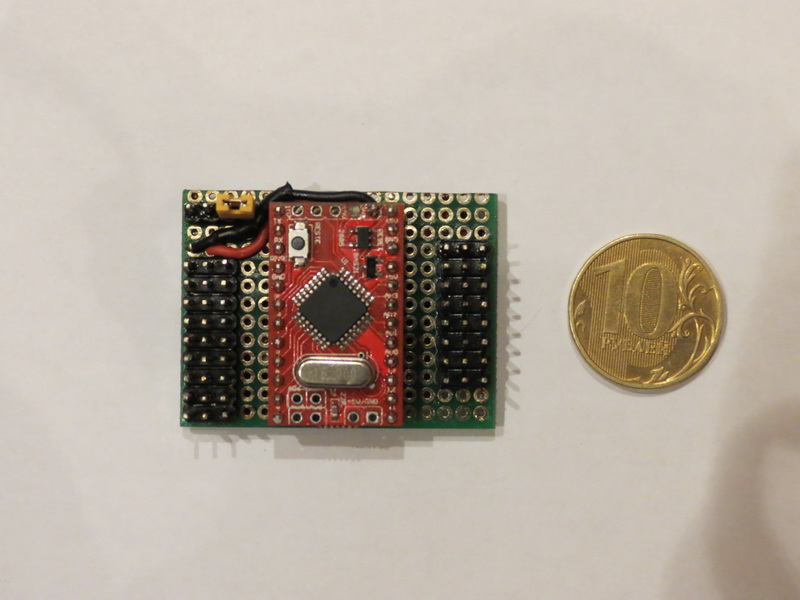
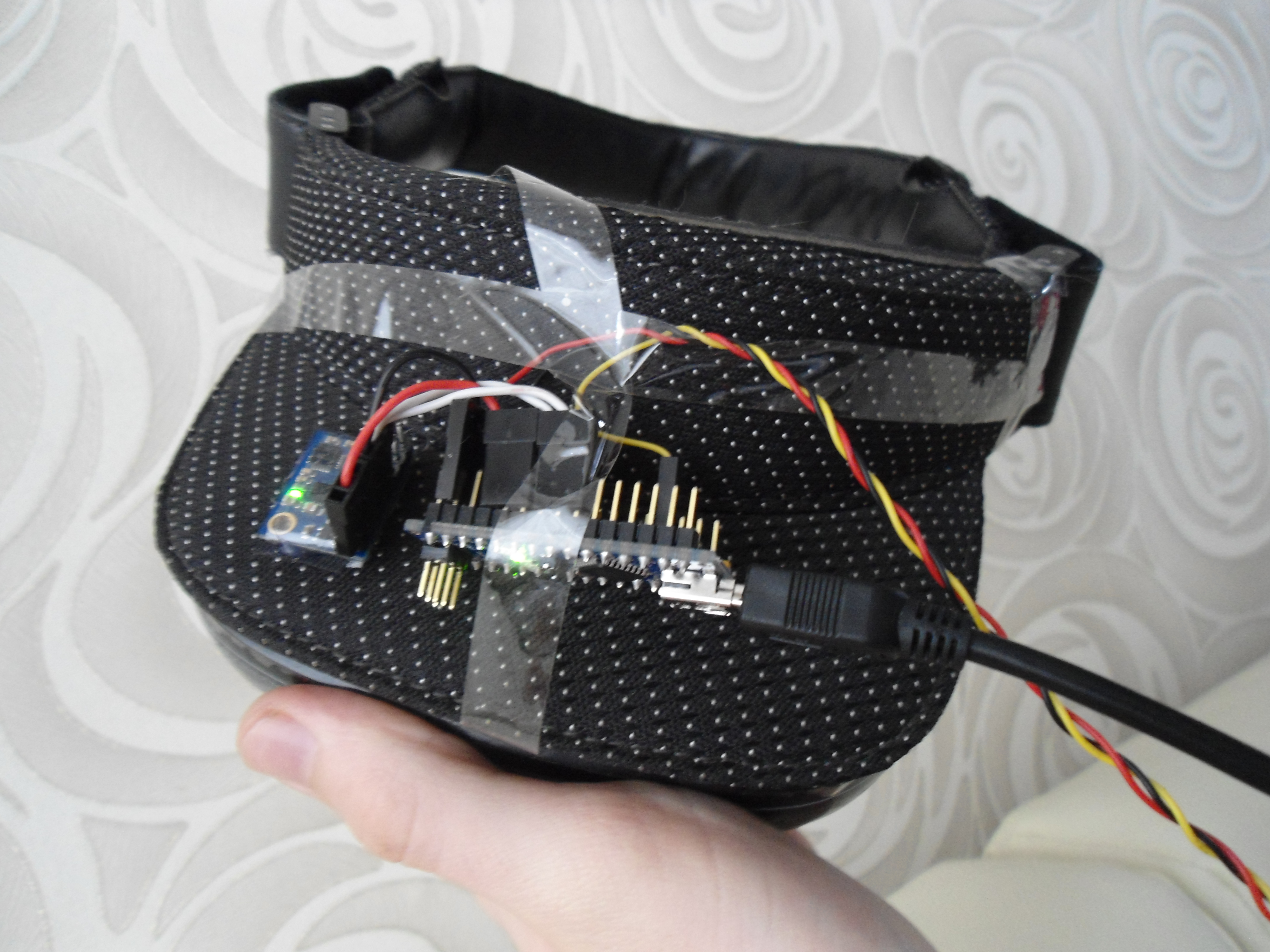
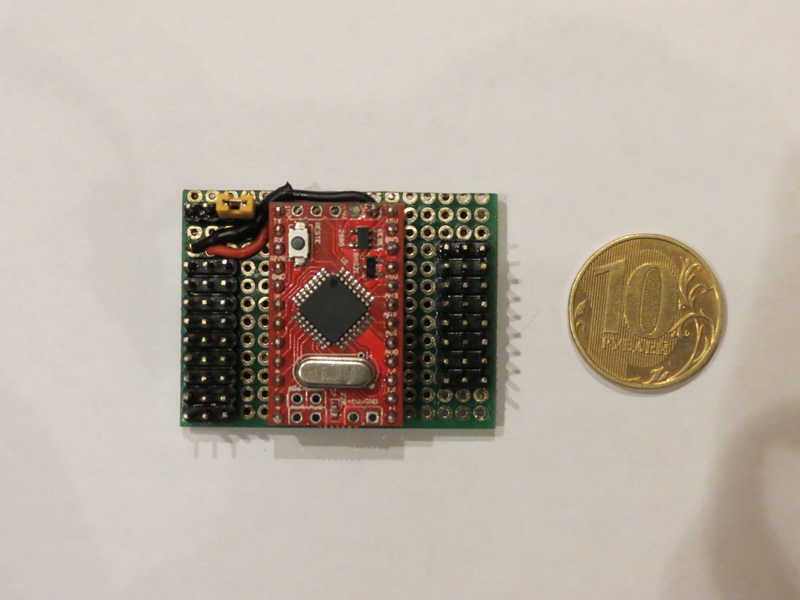
• Самостоятельное изготовление частей механической руки (детали механизма, электрической схемы).
• Найти подходящий материал и опциональные детали для создания робота.
• Обучится программировать на языке С++
• Написать программу для пропорционального управления.
• Написать программу для автономного выполнения работы, без участия человека.
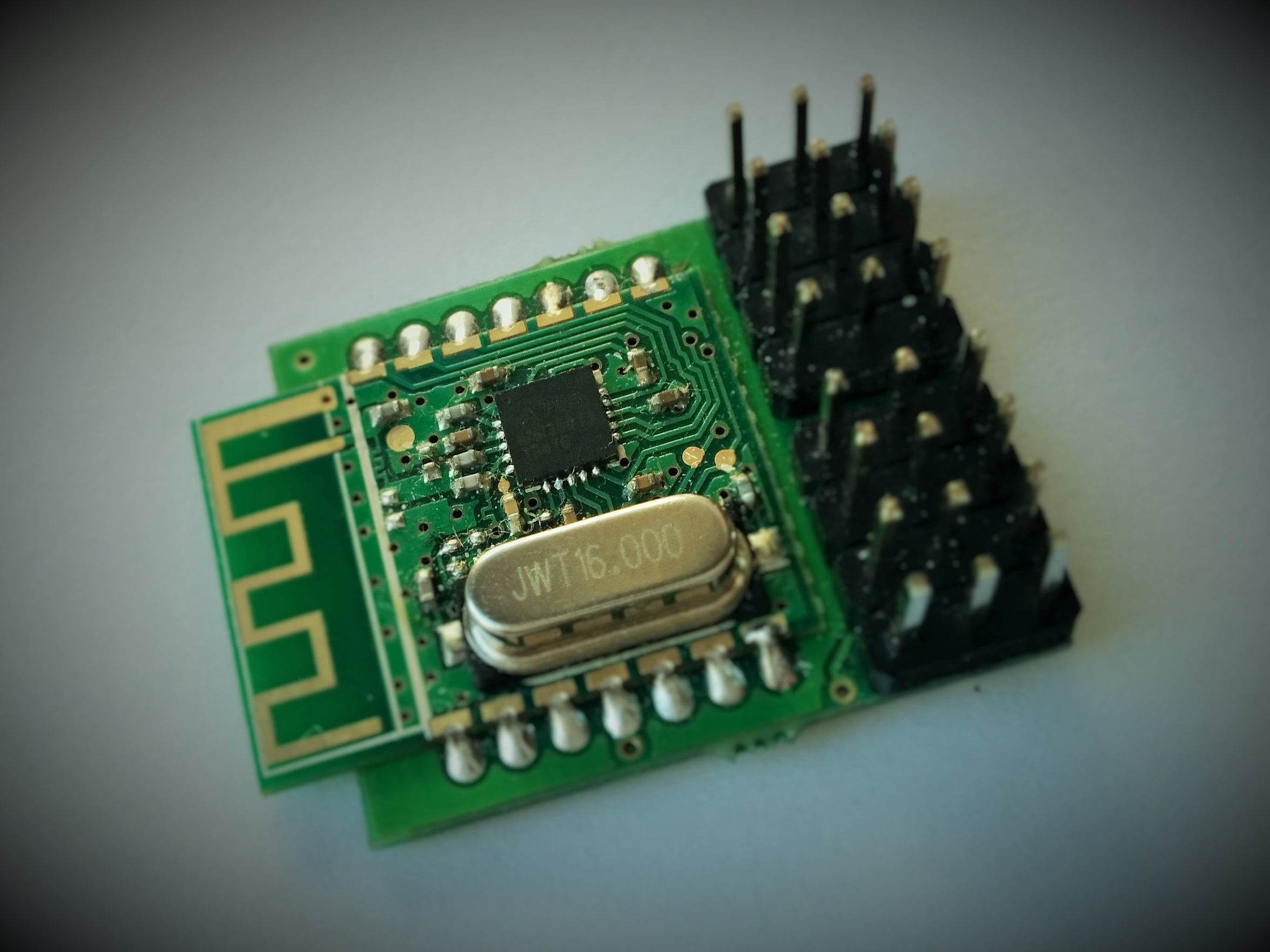
• Обучиться технологии создания схем и пайке




.1392580327046.jpg)

.b1cb02c65ca3b962e5a4a83e73131de0.jpg)
















