Исходные:
- квадрокоптер на APM 2.5
- non3DR Radio (радиомодем, телеметрия, etc)
- планшет Acer A500 на Андроиде
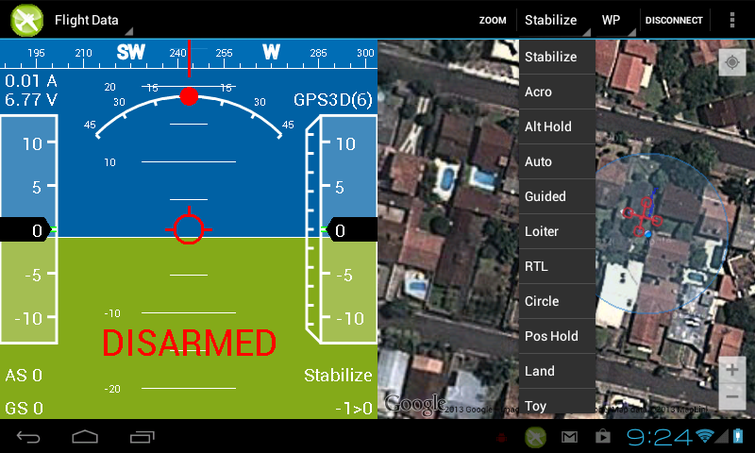
Цель: контролировать процессы, происходящие на квадрокоптере с помощью планшета.
Используемая программа: DroidPlanner
- квадрокоптер на APM 2.5
- non3DR Radio (радиомодем, телеметрия, etc)
- планшет Acer A500 на Андроиде
Цель: контролировать процессы, происходящие на квадрокоптере с помощью планшета.
Используемая программа: DroidPlanner













