
Дорогие друзья, моделисты, коллеги.
Представляем Вам результат двухмесячного труда двух учащихся робототехнического кружка станции юных техников города-курорта Анапа.
В кратце о нас... Наша команда называется OmniKid (что в переводе означает всесторонне развитый ребёнок). Мы являемся призёрами соревнований по робототехнике в Краснодаре и Сочи (номинация Hello, Robot! траектория и биатлон роботов). После победы на соревнованиях регионального масштаба нам была предоставлена возможность заявить о себе на Всероссийском молодёжном робототехническом фестивале "Робофест-2015", который пройдёт в Москве 13 февраля 2015 года,
и в этот раз мы будем участвовать в категории Фристайл - исследовательские роботы.
Перед Вами автономный беспилотный многоцелевой катер охраны водного районоа Государственного природного заповеднника Утриш.
Основной задачей данного робота является видеомониторинг береговой черты и водного района охраняемого периметра.
Второстепенной - забор морской воды для лабораторного анализа;
- отслеживание мигрирующих редких видов птиц ;
- выявление нарушителей.
Данный робот оснащён гиростабилизированной камерой с технологией FPV; контроллером, позволяющим катеру работать в автономном режиме, а так же двумя мощными электрическими моторами.
Предлагаю рассмотреть данное устройство более подробно от постройки до испытаний.
Идея создания появилась у мальчишек после посещения экскурсии в заповеднике. Они заметили, что на охрану заказника тратится достаточно много сил и средств. По берегу ходят казачьи патрули, на воде патрулируют маломерные суда с двигателем внутреннего сгорания (не экологично получается) и экипажем на борту, по этому было принято решение о разработке и воплощении в жизнь чего-то менее затратного и не менее эффективного.
И так приступим:
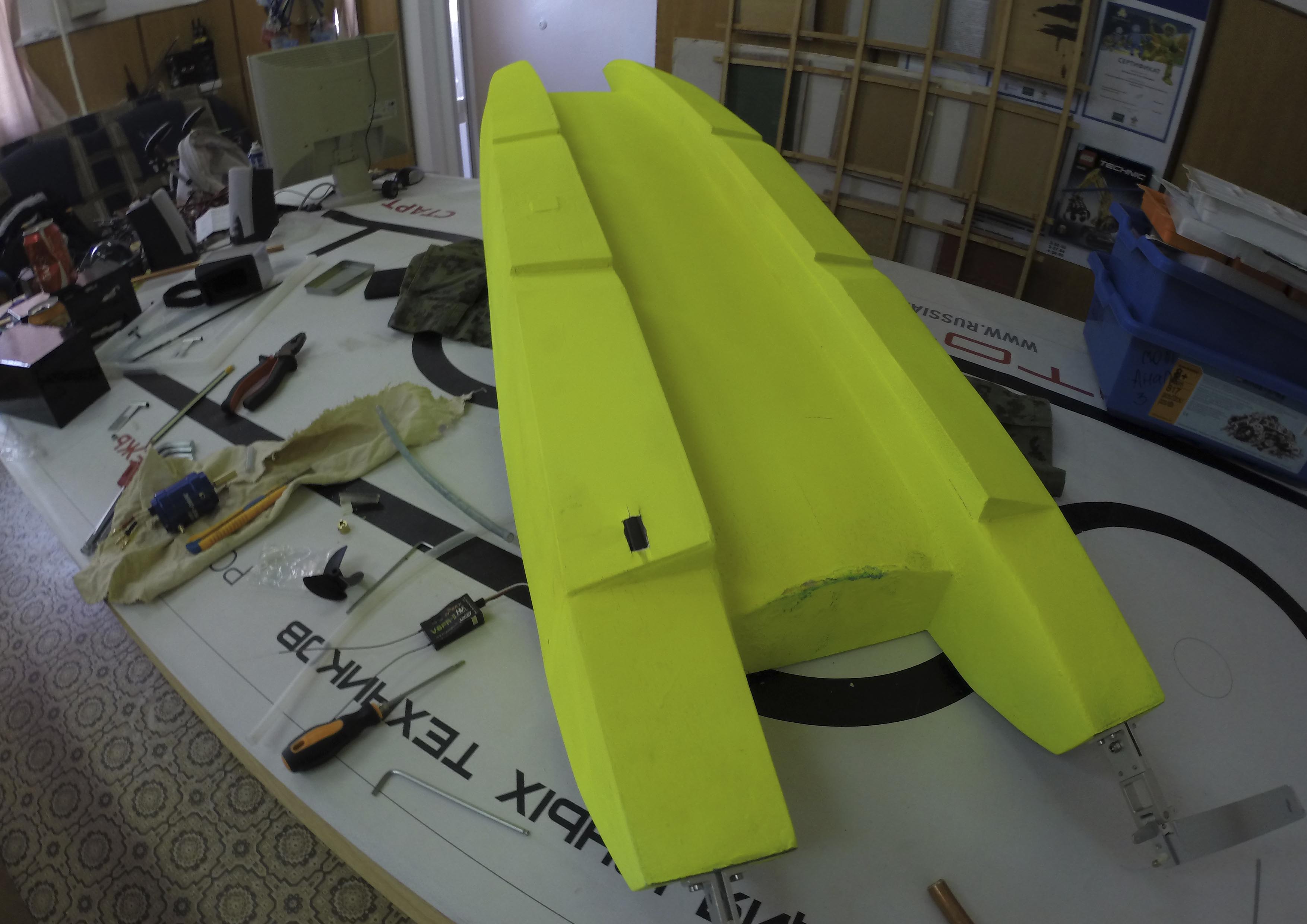
У меня в гараже лежал катер катамаранного типа Mystic c5000 собственной постройки (тогда, когда я его строил, ещё не знал, что можно делиться своим опытом с товарищами на ПаркФлаере), так вот, решили за основу взять его:


Сначала сняли остатки электроники, выломали не нужные и хлипкие части корпуса. Преимущественно корпус построен из ПВХ 3мм, с бальзовыми вставками по борту:

Ободрали наклейки и старую краску:


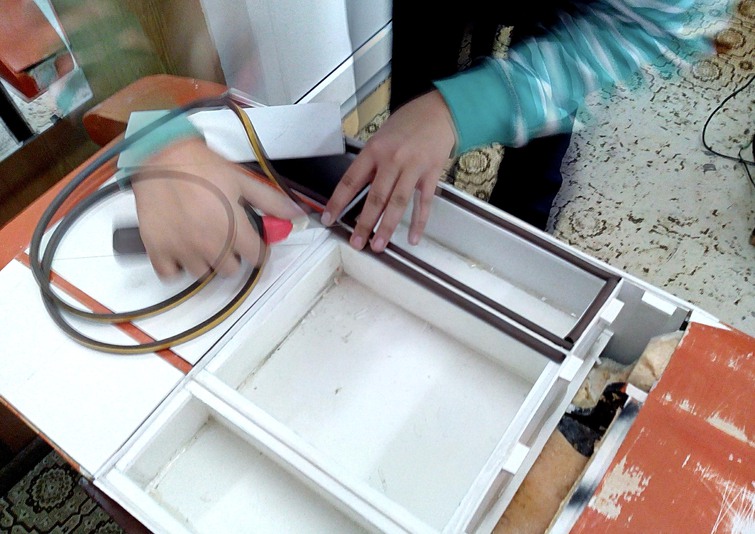
Начали изготовление герметичных отсеков:

Установили электрическую помпу (в правую лыжу) для принудительного охлаждения регуляторов и заклеели входное отверстие двустороннем скотчем на время постройки и покраски (при незначительном переоборудовании эта помпа может накачать воду в резервуар для лабораторного анализа):


Так же добавили по контуру отсеков специальные полосочки из ПВХ на которые наклеели уплотнитель для окон (в дальнейшем это нам поможет для герметизации отсеков):
Практически подготовили корпус к шпаклеванию:


Начали шпаклевать и зачищать (применяли обычную автомобильную шпаклёвку):

Нам было необходимо установить нашу камеру на какой-то надстройке, но и с этой задачей мальчишки справились.
Из ПВХ толщиной 3 и 4 мм изготовили надстройку и протянули провода (на фото выше).
И, при покраске сразу допустили ошибку. Начали наносить краску предварительно НЕ загрунтовав поверхность.
Вот что получилось:

Потом всё-таки поняли, что делаем что-то не то и решили спросить как правильно. Нам ответили, что грунтовать нужно обязательно.
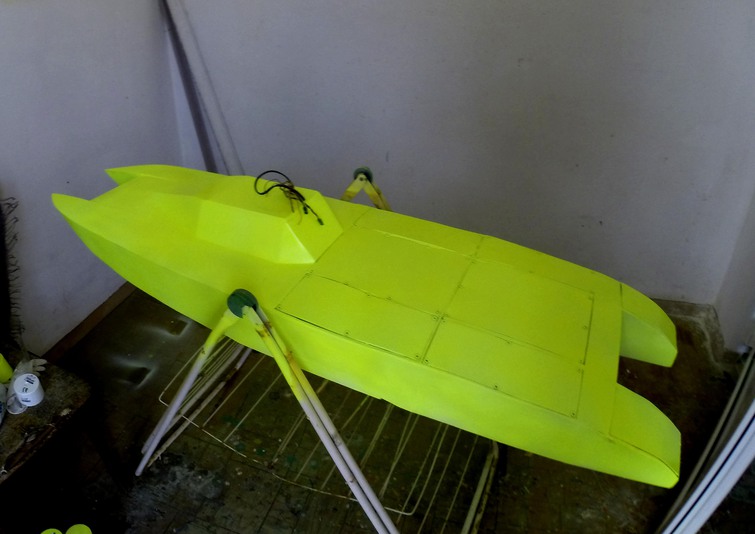
Загрунтовали и приступили к покраске:
Первые слои краски:

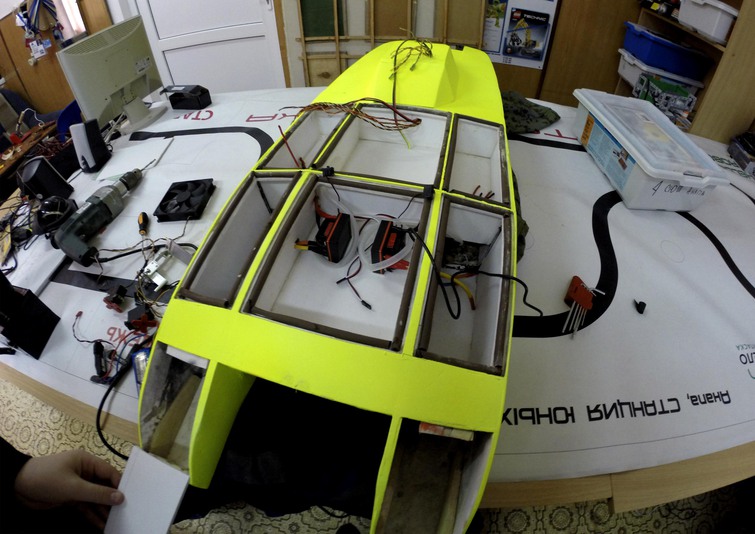
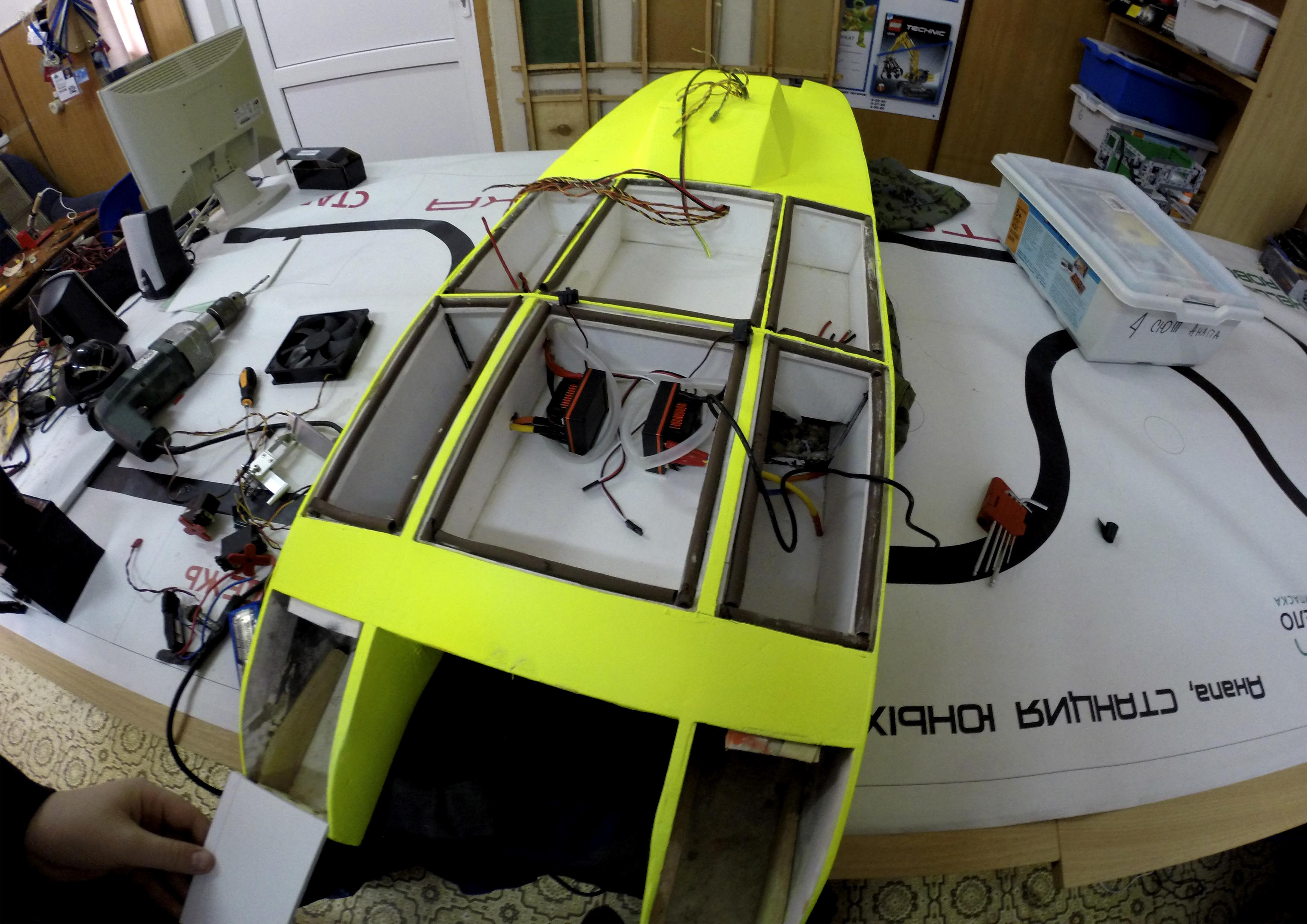
Настал долгожданный момент уставки оборудования.
Решили начать с регуляторов хода и трубки принудительного охлаждения:
Затем появилась необходимость создать (срочно) презентационную обложку (вы её видели в самом начале).
За одно и примерили изготовленный модуль видеопередачи:

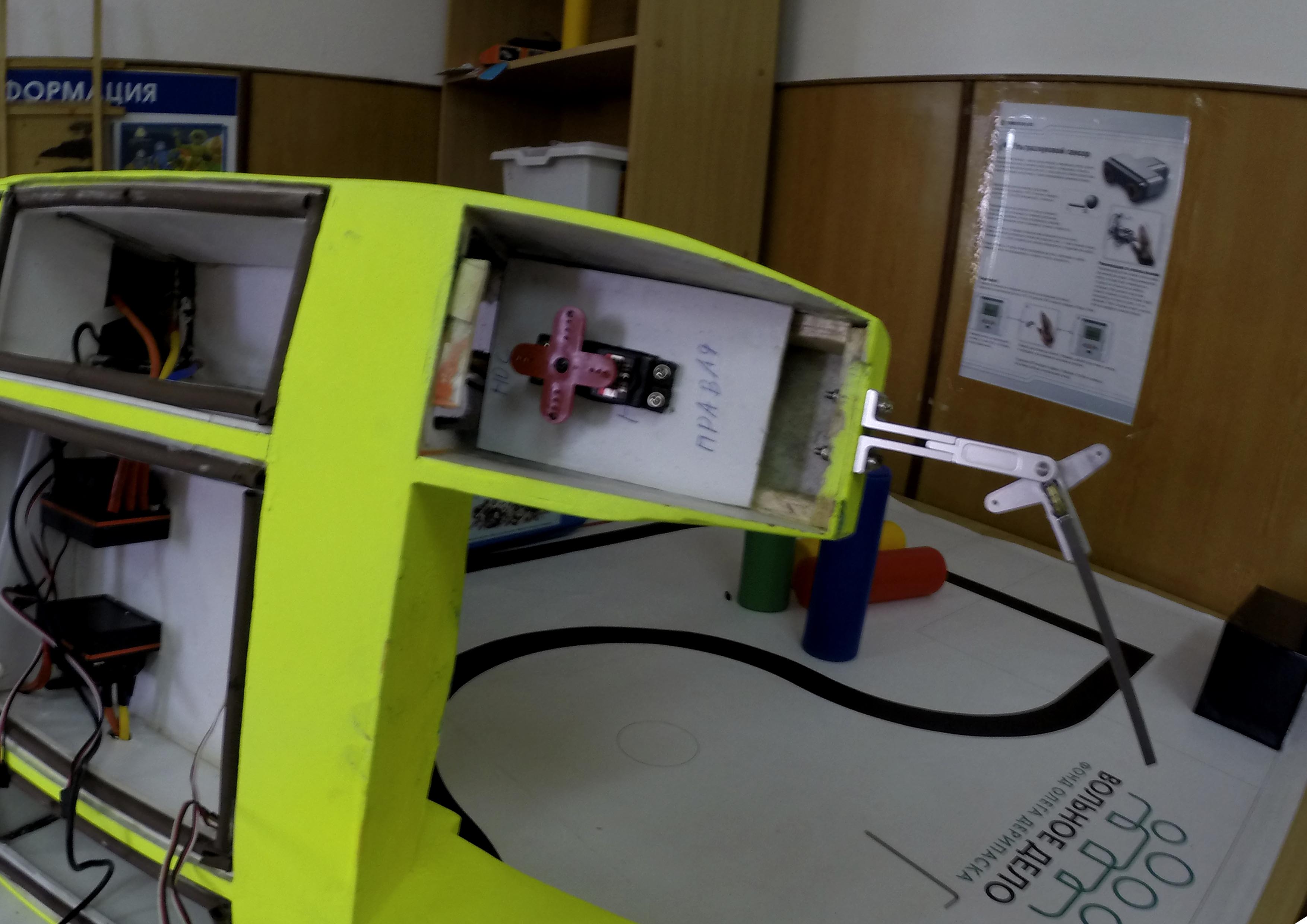
Продолжили работу над проектом установкой сервоприводов и рулей направления.
Установили площадки для серв, укрепили площадки установки рулей:
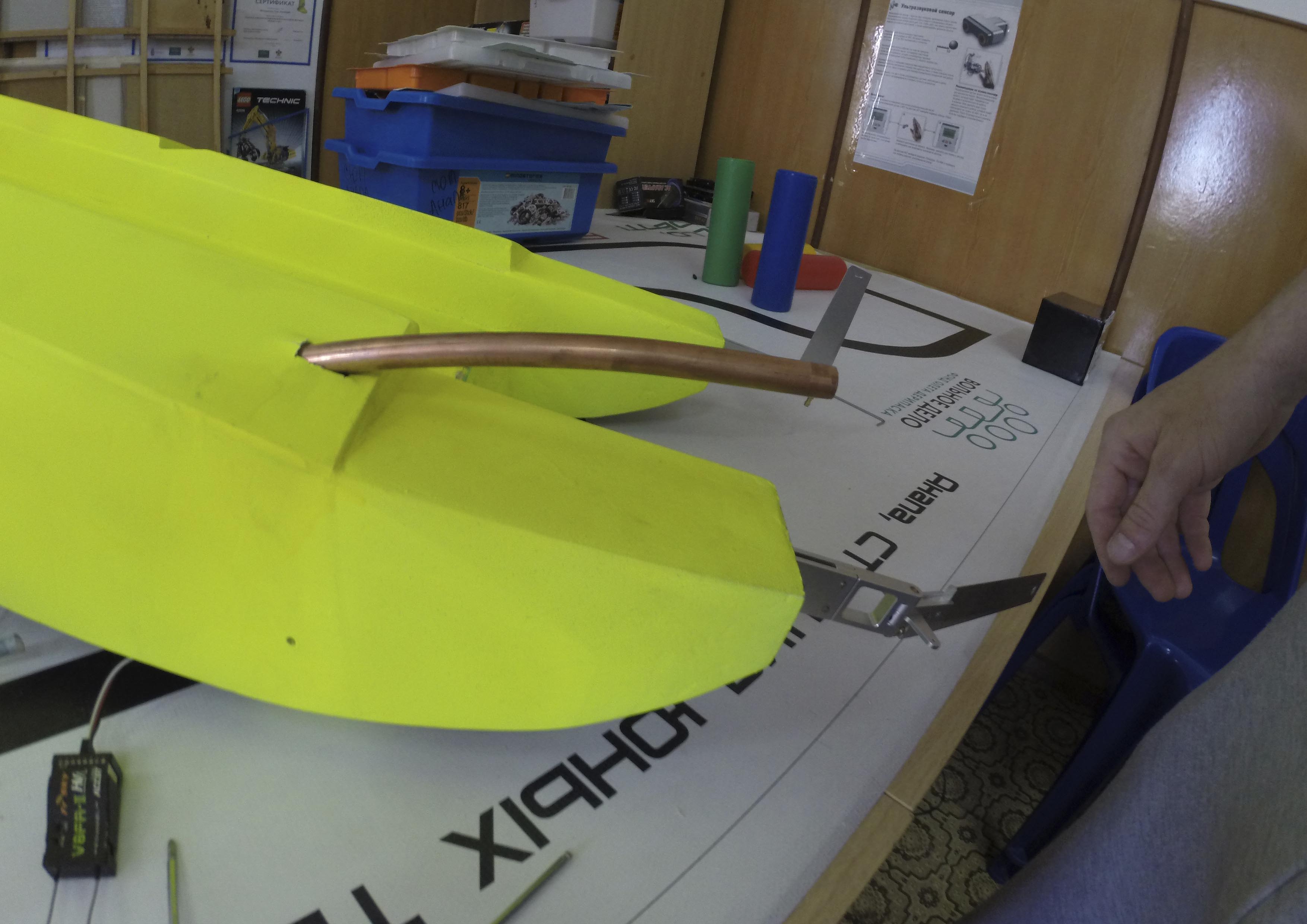
Начали установку валолиний. Проделали прямоугольной отверствие в днище моторного отсека и установили медную трубку.

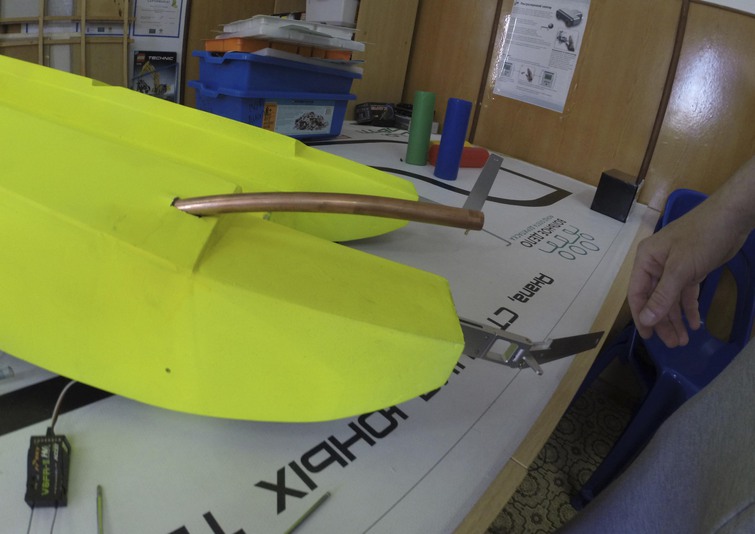
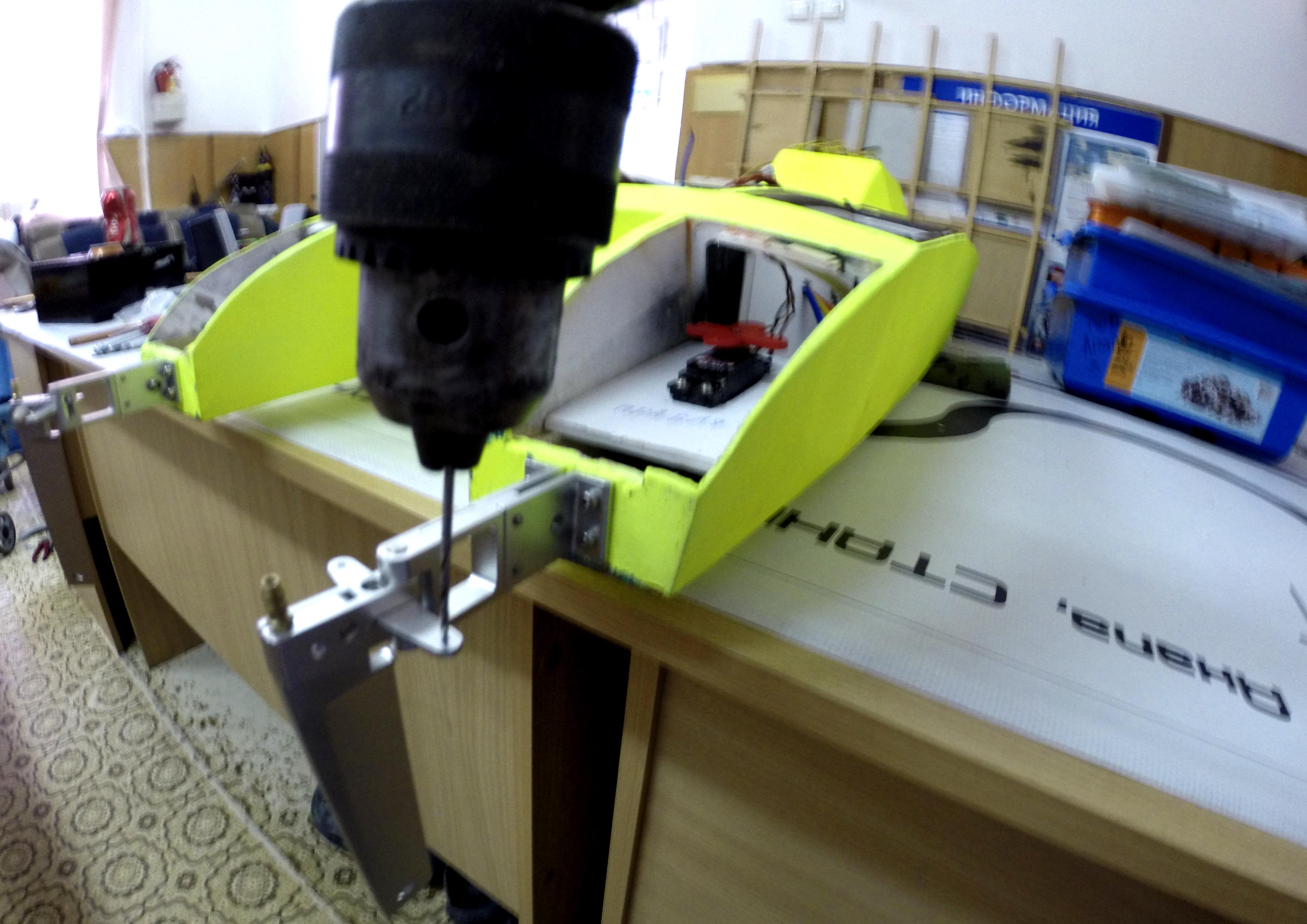
При установке стальных тяг с металлическими наконечниками возникла проблема: диаметр отверстия не совпадал с диаметром втулочки наконечника. Пришлось немного рассверлить, а только после этого уже установили тяги:

Загерметизировали термоклеем отсеки с сервприводами:

Установили валолинии с винтами:

Изготовили моторамы и установили моторы:


Однако крепление на родной втулке оказалось не надёжным и мы решили переделать его и поставили другое, более надёжное:
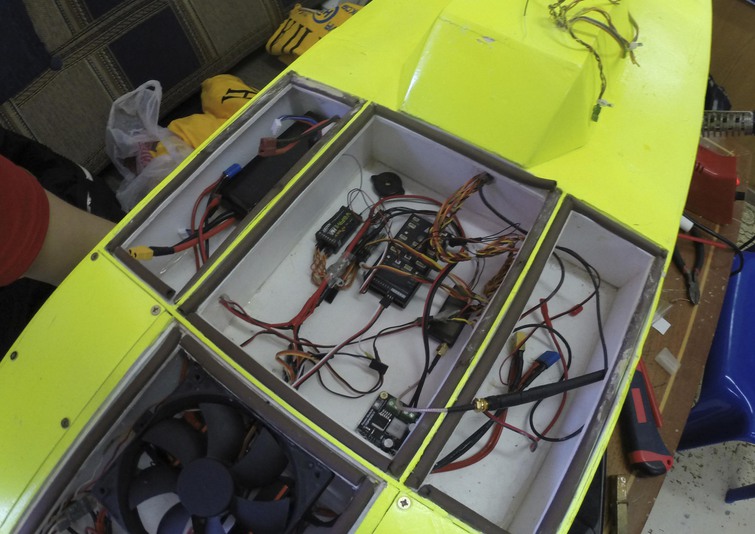
В отсек с регуляторами установили куллер
 Распечатали наклейки:
Распечатали наклейки:

Наконец-то настал долгожданный момент...
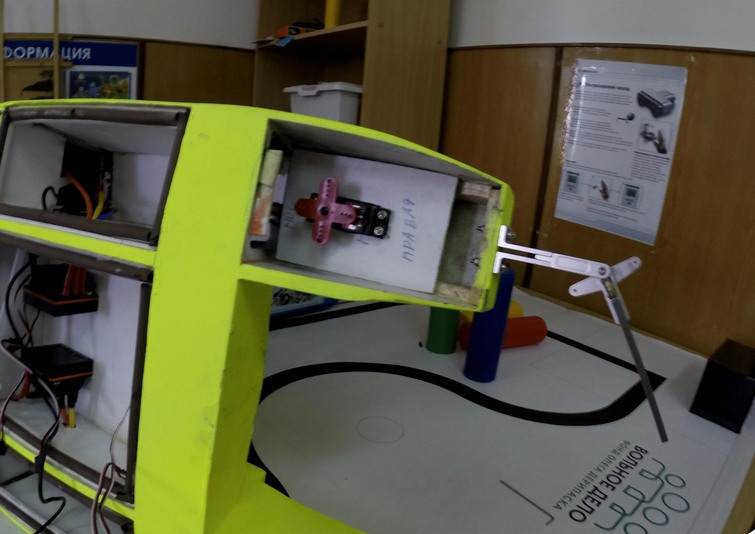
Установка самого главного - автопилот!
Иначе наш катер не сможет быть роботом.
НО... Чтобы не тратить время и нервы на воде, мы решили испытать автопилот в домашних условиях и смастерили стенд.
С мальчишками разбирались вместе, т.к. ни я ни, тем более, они раньше не работали с такой серьёзной техникой.

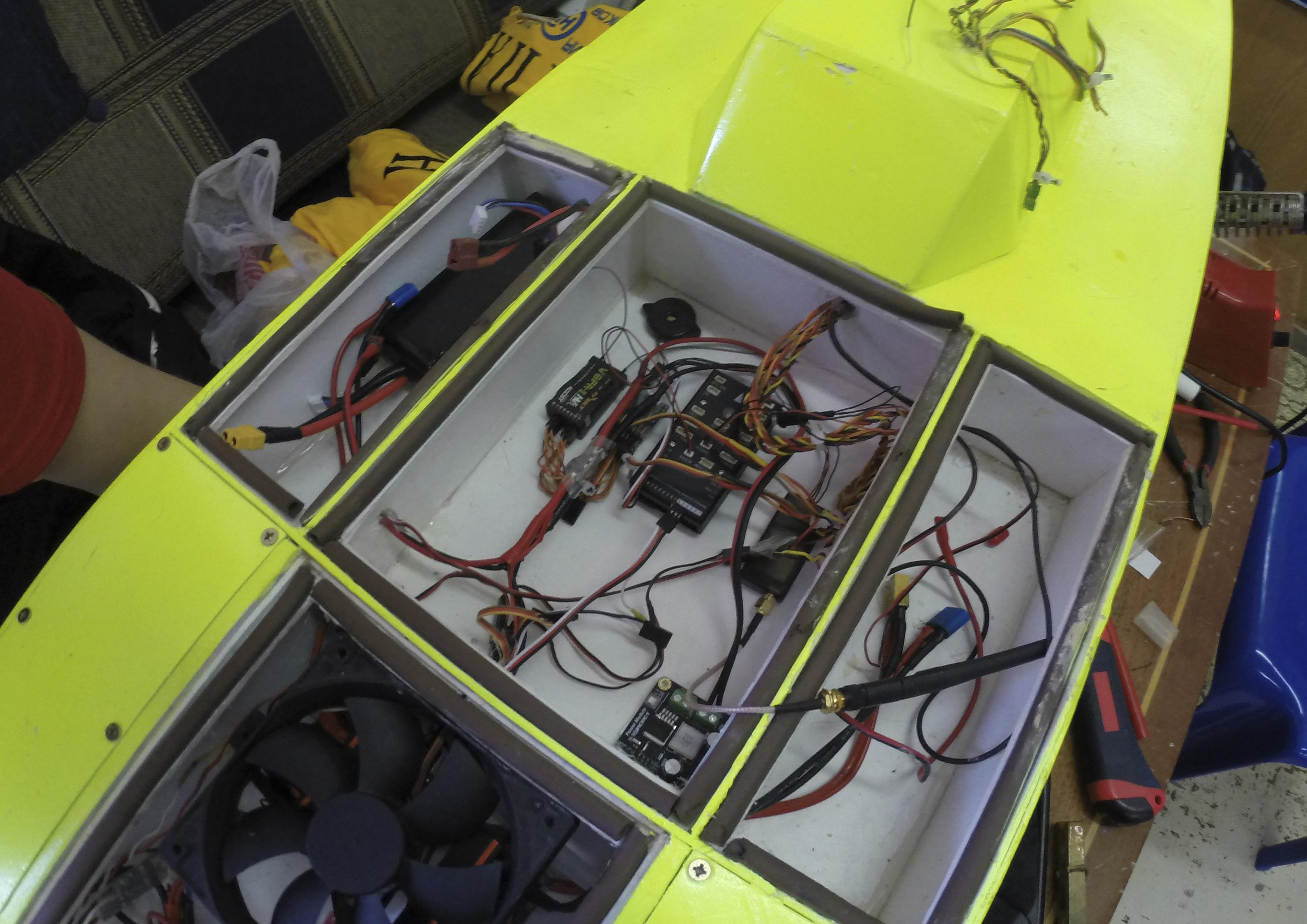
Параллельно с этим начали готовить разводку питания в корпусе:

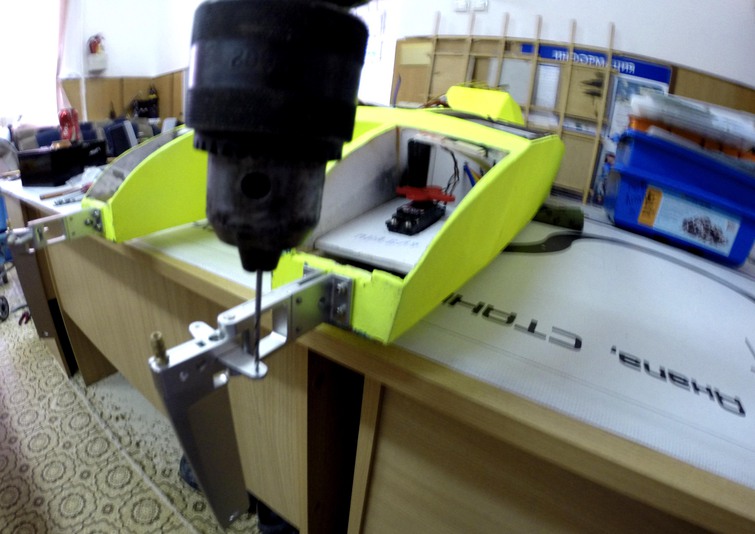
Следующая фотография, скорее всего вызовет у Вас недоумение, и Вы, наверняка, зададите вопрос: "А машинка-то тут причём?!". Сразу отвечу - прошивка ArduRover вполне катит и на катер. Программу решили пробовать на автомодели.
Пришлось её (автомодель) немного переоборудовать:

После удачных испытаний на автомоделе (автомодель не пострадала, хотя носилась как угарелая), переставили автопилот на объект наших истязаний:
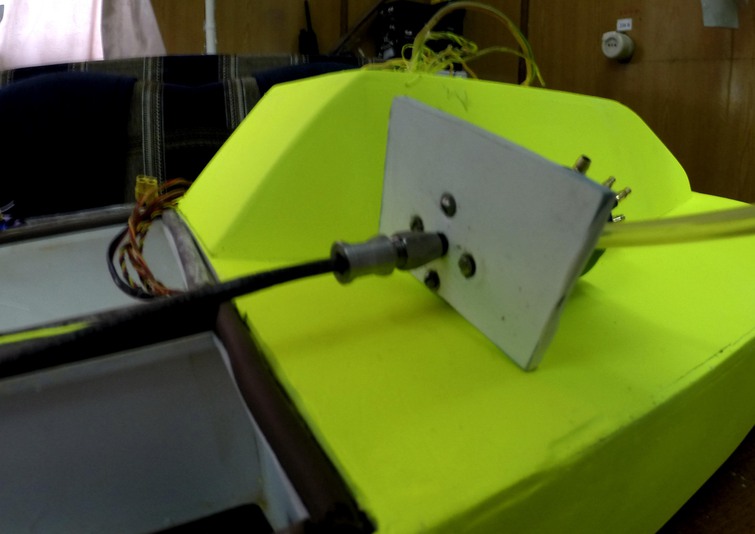
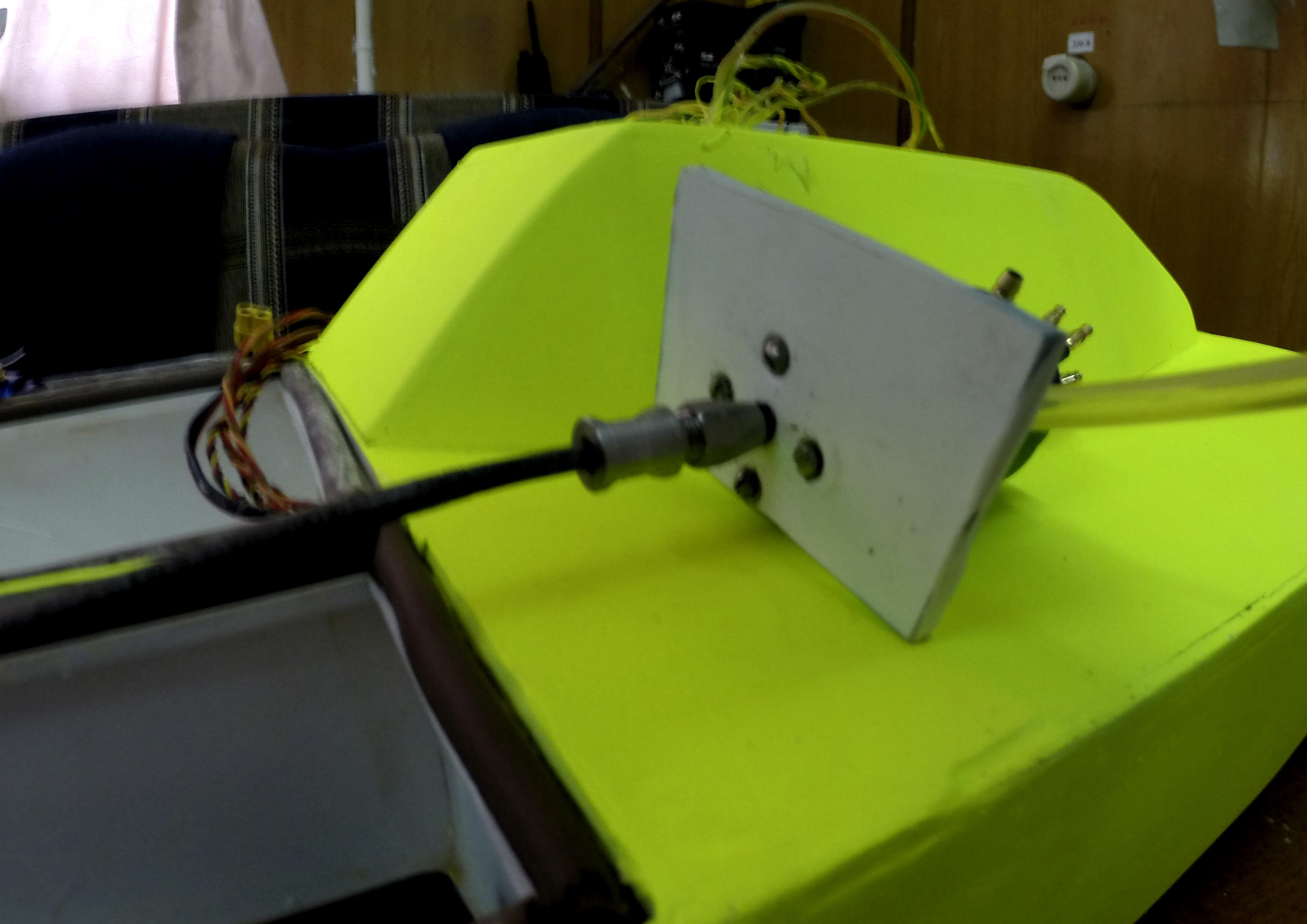
Затем установили разьёмные соединения на модуль видеокамеры.
Немного отклонюсь от темы, потому что хочу извиниться, что не фотографировал подробно постройку TV модуля; но с удовольствием расскажу, что он состоит из 3-х сервоприводов, примитивной камеры и NAZA-M-Lite в качестве системы стабилизации, видеопередатчик на 5.8 гГц мощьностью 800 мВт. (Всё это поместиось в упаковочном прозрачном боксе от ГоПро). Камера управляется по горизонту (вправо и влево) и продольному наклону, стабилизируется по горизонту и вертикали.
Этот модуль тоже делали дети, тоже под моим руководством (в плане "подключи это - туда, это - сюда; это - то, вот это - сё", размещали составляющие они сами)
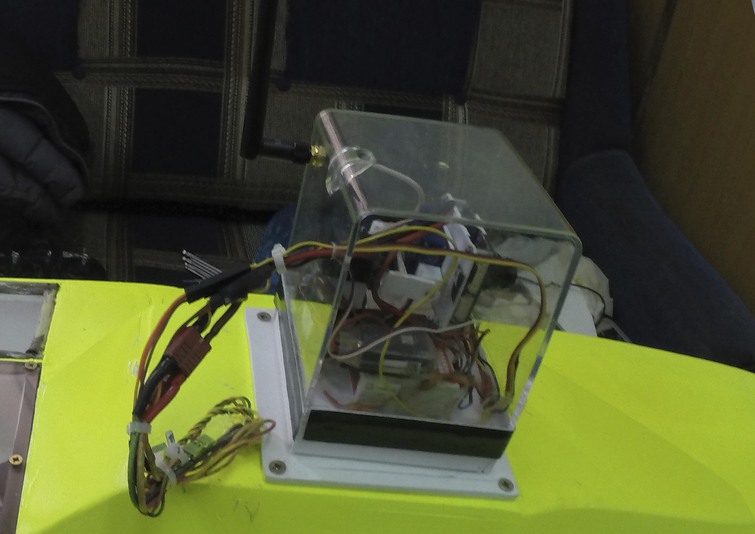
Для удбства эксплуатации и наглядности мы сделали крышку автопилотного отсека из оргстекла (точнее не из оргстекла, а из его аналога из полимеров. На языке название крутиться, а вспомнить не могу)
Последние штрихи - наклейки
И пойдём испытывать!
Наклейки грели феном и разглаживали сухой мягкой тряпочкой, плотно прижимая её к поверхности

Ну и как полагается в таких случаях должно быть видео с испытаний...
Вот, пожалуйста (автор видео Олег Теплицкий):
Испытания проводились только в ручном режиме в виду нехватки времени.
После фестваля в Москве обязательно испытаем в авторежимах.
Так же хочу отметить, что на испытаниях присутствовала заместитель директора Государственного природного заповедника Утриш.
Ольга Николаевна отметила, что это достаточно перспективная и нужная разработка для заповедника.
Ещё она предложила установить своё специальное оборудование для модернизации катера с целью повышения эффективности работы заповедника.
В заключении хотелось бы отметить энтузиазм мальчишек и стремление достичь положительных результатов.
P.S. Вот не полный список оборудования, применимого в нашем проекте:
2 вот таких мотора:
Двигатель Turnigy AquaStar 3660-2050KV
Модуль ФР скай:
FrSky DJT 2.4Ghz комплект для JR с модулем телеметрии и приемником V8FR-II
Видеопередатчик:
Видеопередатчик TX58-800 5.8Ghz 32CH 800mW
2 таких удлинителя:
Удлинитель SMA Male - SMA Female 180мм для Fatshark/ImmersionRC
2 рулевых устройства:
In-Line Strut Rudder Assembly (Large)
2 адаптера вала:
металлический адаптер вала.
Винты (3 комплекта заказали):
3-Blade Boat Propellers 40x55mm (2pcs/bag)
Антенна ГПС:
Quanum GPS модуль LEA-6H с компасом, корпусом и монтажной опорой
ППМ энкодер:
PPM-энкодер для HKPilot 32Датчик тока с разводкой питания:
HK Pilot Power VI Module, Distribution Board And Dual UBEC ALL-In-One (120A and 10s)
ОСД:
Minim OSD v1.1
Телеметрия:
HKPilot Transceiver Telemetry Radio Set V2 (433Mhz)
Конечно же сам процессор:
HKPilot32 Autonomous Vehicle 32Bit Control Set w/ Power ModuleИ многое другое...
P.P.S. Примим с пониманием любую критику, а также постараемся учесть Ваши пожелания.
Представляем Вам результат двухмесячного труда двух учащихся робототехнического кружка станции юных техников города-курорта Анапа.
В кратце о нас... Наша команда называется OmniKid (что в переводе означает всесторонне развитый ребёнок). Мы являемся призёрами соревнований по робототехнике в Краснодаре и Сочи (номинация Hello, Robot! траектория и биатлон роботов). После победы на соревнованиях регионального масштаба нам была предоставлена возможность заявить о себе на Всероссийском молодёжном робототехническом фестивале "Робофест-2015", который пройдёт в Москве 13 февраля 2015 года,
и в этот раз мы будем участвовать в категории Фристайл - исследовательские роботы.
Перед Вами автономный беспилотный многоцелевой катер охраны водного районоа Государственного природного заповеднника Утриш.
Основной задачей данного робота является видеомониторинг береговой черты и водного района охраняемого периметра.
Второстепенной - забор морской воды для лабораторного анализа;
- отслеживание мигрирующих редких видов птиц ;
- выявление нарушителей.
Данный робот оснащён гиростабилизированной камерой с технологией FPV; контроллером, позволяющим катеру работать в автономном режиме, а так же двумя мощными электрическими моторами.
Предлагаю рассмотреть данное устройство более подробно от постройки до испытаний.
Идея создания появилась у мальчишек после посещения экскурсии в заповеднике. Они заметили, что на охрану заказника тратится достаточно много сил и средств. По берегу ходят казачьи патрули, на воде патрулируют маломерные суда с двигателем внутреннего сгорания (не экологично получается) и экипажем на борту, по этому было принято решение о разработке и воплощении в жизнь чего-то менее затратного и не менее эффективного.
И так приступим:
У меня в гараже лежал катер катамаранного типа Mystic c5000 собственной постройки (тогда, когда я его строил, ещё не знал, что можно делиться своим опытом с товарищами на ПаркФлаере), так вот, решили за основу взять его:


Сначала сняли остатки электроники, выломали не нужные и хлипкие части корпуса. Преимущественно корпус построен из ПВХ 3мм, с бальзовыми вставками по борту:

Ободрали наклейки и старую краску:

Начали изготовление герметичных отсеков:

Установили электрическую помпу (в правую лыжу) для принудительного охлаждения регуляторов и заклеели входное отверстие двустороннем скотчем на время постройки и покраски (при незначительном переоборудовании эта помпа может накачать воду в резервуар для лабораторного анализа):


Так же добавили по контуру отсеков специальные полосочки из ПВХ на которые наклеели уплотнитель для окон (в дальнейшем это нам поможет для герметизации отсеков):
Практически подготовили корпус к шпаклеванию:


Начали шпаклевать и зачищать (применяли обычную автомобильную шпаклёвку):

Нам было необходимо установить нашу камеру на какой-то надстройке, но и с этой задачей мальчишки справились.
Из ПВХ толщиной 3 и 4 мм изготовили надстройку и протянули провода (на фото выше).
И, при покраске сразу допустили ошибку. Начали наносить краску предварительно НЕ загрунтовав поверхность.
Вот что получилось:

Потом всё-таки поняли, что делаем что-то не то и решили спросить как правильно. Нам ответили, что грунтовать нужно обязательно.
Загрунтовали и приступили к покраске:

Первые слои краски:


Настал долгожданный момент уставки оборудования.
Решили начать с регуляторов хода и трубки принудительного охлаждения:
Затем появилась необходимость создать (срочно) презентационную обложку (вы её видели в самом начале).
За одно и примерили изготовленный модуль видеопередачи:

Продолжили работу над проектом установкой сервоприводов и рулей направления.
Установили площадки для серв, укрепили площадки установки рулей:
Начали установку валолиний. Проделали прямоугольной отверствие в днище моторного отсека и установили медную трубку.
При установке стальных тяг с металлическими наконечниками возникла проблема: диаметр отверстия не совпадал с диаметром втулочки наконечника. Пришлось немного рассверлить, а только после этого уже установили тяги:

Загерметизировали термоклеем отсеки с сервприводами:

Установили валолинии с винтами:

Изготовили моторамы и установили моторы:


Однако крепление на родной втулке оказалось не надёжным и мы решили переделать его и поставили другое, более надёжное:
В отсек с регуляторами установили куллер
 Распечатали наклейки:
Распечатали наклейки:
Наконец-то настал долгожданный момент...
Установка самого главного - автопилот!
Иначе наш катер не сможет быть роботом.
НО... Чтобы не тратить время и нервы на воде, мы решили испытать автопилот в домашних условиях и смастерили стенд.
С мальчишками разбирались вместе, т.к. ни я ни, тем более, они раньше не работали с такой серьёзной техникой.

Параллельно с этим начали готовить разводку питания в корпусе:

Следующая фотография, скорее всего вызовет у Вас недоумение, и Вы, наверняка, зададите вопрос: "А машинка-то тут причём?!". Сразу отвечу - прошивка ArduRover вполне катит и на катер. Программу решили пробовать на автомодели.
Пришлось её (автомодель) немного переоборудовать:

После удачных испытаний на автомоделе (автомодель не пострадала, хотя носилась как угарелая), переставили автопилот на объект наших истязаний:
Затем установили разьёмные соединения на модуль видеокамеры.
Немного отклонюсь от темы, потому что хочу извиниться, что не фотографировал подробно постройку TV модуля; но с удовольствием расскажу, что он состоит из 3-х сервоприводов, примитивной камеры и NAZA-M-Lite в качестве системы стабилизации, видеопередатчик на 5.8 гГц мощьностью 800 мВт. (Всё это поместиось в упаковочном прозрачном боксе от ГоПро). Камера управляется по горизонту (вправо и влево) и продольному наклону, стабилизируется по горизонту и вертикали.
Этот модуль тоже делали дети, тоже под моим руководством (в плане "подключи это - туда, это - сюда; это - то, вот это - сё", размещали составляющие они сами)
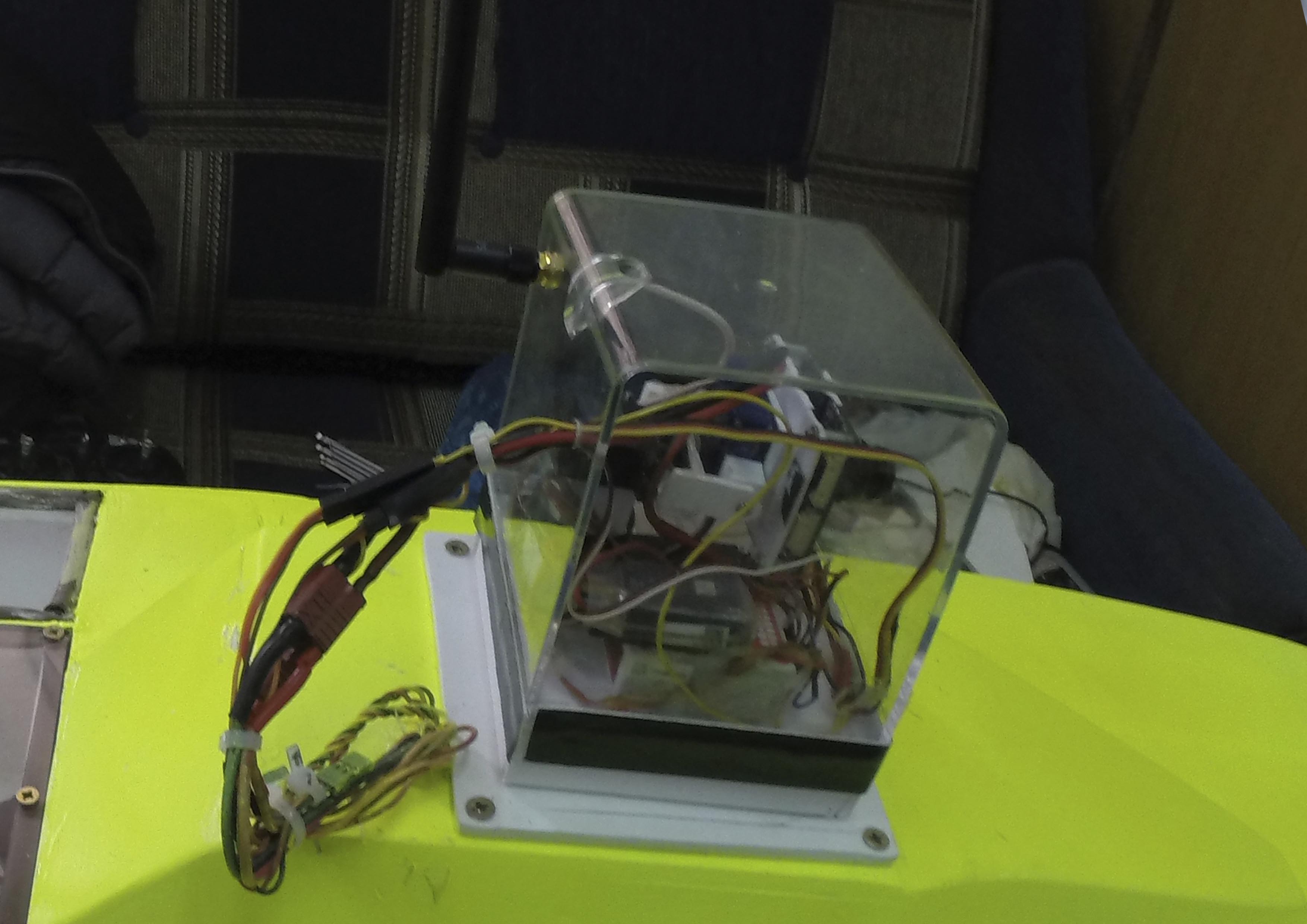
Для удбства эксплуатации и наглядности мы сделали крышку автопилотного отсека из оргстекла (точнее не из оргстекла, а из его аналога из полимеров. На языке название крутиться, а вспомнить не могу)
Последние штрихи - наклейки
И пойдём испытывать!
Наклейки грели феном и разглаживали сухой мягкой тряпочкой, плотно прижимая её к поверхности

Ну и как полагается в таких случаях должно быть видео с испытаний...
Вот, пожалуйста (автор видео Олег Теплицкий):
Испытания проводились только в ручном режиме в виду нехватки времени.
После фестваля в Москве обязательно испытаем в авторежимах.
Так же хочу отметить, что на испытаниях присутствовала заместитель директора Государственного природного заповедника Утриш.
Ольга Николаевна отметила, что это достаточно перспективная и нужная разработка для заповедника.
Ещё она предложила установить своё специальное оборудование для модернизации катера с целью повышения эффективности работы заповедника.
В заключении хотелось бы отметить энтузиазм мальчишек и стремление достичь положительных результатов.
P.S. Вот не полный список оборудования, применимого в нашем проекте:
2 вот таких мотора:
Двигатель Turnigy AquaStar 3660-2050KV
Модуль ФР скай:
FrSky DJT 2.4Ghz комплект для JR с модулем телеметрии и приемником V8FR-II
Видеопередатчик:
Видеопередатчик TX58-800 5.8Ghz 32CH 800mW
2 таких удлинителя:
Удлинитель SMA Male - SMA Female 180мм для Fatshark/ImmersionRC
2 рулевых устройства:
In-Line Strut Rudder Assembly (Large)
2 адаптера вала:
металлический адаптер вала.
Винты (3 комплекта заказали):
3-Blade Boat Propellers 40x55mm (2pcs/bag)
Антенна ГПС:
Quanum GPS модуль LEA-6H с компасом, корпусом и монтажной опорой
ППМ энкодер:
PPM-энкодер для HKPilot 32Датчик тока с разводкой питания:
HK Pilot Power VI Module, Distribution Board And Dual UBEC ALL-In-One (120A and 10s)
ОСД:
Minim OSD v1.1
Телеметрия:
HKPilot Transceiver Telemetry Radio Set V2 (433Mhz)
Конечно же сам процессор:
HKPilot32 Autonomous Vehicle 32Bit Control Set w/ Power ModuleИ многое другое...
P.P.S. Примим с пониманием любую критику, а также постараемся учесть Ваши пожелания.













Надеемся, у подобных личностей скилла не хватит что-нибудь похожее сделать...
Если добавить резервуар, то помпа, в нужный нам момент в нужном месте, сможет взять воду для лабораторного анализа.
Мы вроде-как предусмотрели такую возможность.
Спасибо Вам за подсказку.
Проводочки я думаю, спрячете.
GPS - советую на земле потестировать С ПРИСТРАСТИЕМ - от него зависит очень много. В моих лапах побывало 3 или 4 GPS модулей - у всех были те или иные глюки. Пришел к мысли, что на нем экономить не надо.
В итоге мне знакомый спаял сам модуль GPS/Glonass модуль (Рустэм Вафин, спасибо) - теперь у меня минимум 16, а максимум 24 спутника, при hdop 0,5.
Тестируйте на земле - надо подключить к МП и наблюдать за колебаниями вашего дрона на виртуальной карте. Чем меньше трепыхается на месте, тем лучше. А уж если "погнал" куда-то - то это значит проскочила ошибка.
Ну и конечно, набо вашу машинку погонять в авторежимах (перед установкой на катер). Обращать внимание на корректность показаний компаса и "самопозиционирование". Компас в МП надо сверять с обычным туристическим. Погрешность не должна быть более 10 градусов (чем меньше, тем лучше) во всех режимах. После перекочевывания электроники с машинки на катер - проверить компас ещё раз - у вас на машинке могло не быть наводок на компас, а на катере могут появиться. При чем проверить на разных оборотах движков (больше оборотов - больше наводки). После миграции электроники на катер - обязательно перекалибровать аксели и компас. И не забудьте сделать compassmot.
Скажите, а зачем вам PPM энкодер? Как у вас приемник к контроллеру подключен? Вроде пиксхок умеет работать с Sbus этого приемника - или я ошибаюсь?
Машинку гоняли в авторежимах - результат устроил.
По поводу компаса так и делали, как ты сказал. Модуль ГПС без Глонасса.
В прошивке ArduRover 2.7.4 нет калибровки акселерометра почему-то.
Сверяли показания компаса с истинным севером.
Приёмник FR Sky может выдавать РРМ сигнал, если закоротить сигнальные выходы на 1-м и 2-м канале, то на сигнальном третьего канала будет РРМ сигнал. Но мы же не зря $ тратили, ну ещё больше электроники - смотриться интереснее.
Провода уберём в нейлоновую оплётку такого же ,как и катер, цвета
Если у вас всё работает без PPM энкодера - уберите его. Меньше электроники - меньше мест для отказов. (ещё говорят, что энкодер задержки в управление вносит, но думаю вам не критично это будет)
Просто я думал, может вам каналы нужны на какие-нибудь заборы воды для анализа или ещё для чего-то. Но даже при подключении через РРМ, с каналов номер 5-8 вроде можно снять обычный PWM сигнал. Надо пробовать, у меня такого приемника не было. У меня в основном такие приемники, у них кроме CPPM ещё есть RSSI (смотрю на ОСД).
На сколько собираетесь максимум отплывать от места старта? Планируется ли уходить за радиус РУ (полностью автономное плавание)?
Ещё, попшикайте на электронику Plastik от Cramolin - мало ли, вдруг брызги попадут. А у вас вроде водичка морская - зело едучая (смерть электронике, если не дай бог попадет). На контакты после того, как всё будет собрано в кучу. Правда, что делать с контроллером - не знаю. Возможно, нужно будет разбирать коробочку и брызгать внутрь, тщательно прикрыв барометр. Или делать некий гермобокс (кстати, это идея - для вас не важна высота нахождения вашего ПА - и бокс может быть ПОЛНОСТЬЮ герметичным). Просто представим фатальную ситуацию - из-за чего-нибудь ваш катер перевернулся (например, налетел на корягу, плавающую ветку...) - электроника не промокнет?
И ещё один аспект - плавающих людей не боитесь? Как решена проблема безопасности на воде?
Вода может попасть только на серва, но их мы забрызгали специальной брызгалкой.
От коряг и прочих плавающих веток не застрахован ни кто.
Плавающих людей не боимся, т.к. удаление от берега в районе применения робота достаточно значительное, порядка нескольких сотен метров, да и купаться в охраняемой зоне никто не даст, туда просто не пропустят.
За дальность действия аппаратуры отпускать будем, но испытания будем проводить с катерами сопровождения, т.е. в процессе выполнения задачи мы будем следовать в непосредственной близости для объективного контроля.
интересно узнать,что за камеру вы поставили на лодку?
и что за камера снимала ваше первое испытание катера?
спасибо заранее
На борту снимала ГоПрошка 3+.
С берега друг снимал на айфон.
Дело в том, что мы собираемся на Робофест, а это мероприятие хоть и носить статус всеросийского, но приезжают команды со всего мира , по этому пришлось сделать такое название
По хорошему винты поставить левого и правого вращения. Но с гибким валом это будет не просто.
Сделать высокую надстройку, что бы модель при перевороте принимала первоначальное положение.
Желательно перья рулей сделать короче, т.к. забор воды находится на много ниже потока от винта.
По поводу переворотов - у нас основная тяжесть находится в лыжах ниже центра величины, соответственно метацентрическая высота значительно превышает высоту надстройки, т.е. перевернуться он может, но вероятность крайне мала.
По поводу рулей... Специально выбирали подлинее, чтобы набегающий поток был более плотным, в отличие от срывного с винтов (исключительно моё мнение)