Нужна попмощь в настрокйке CC3D.
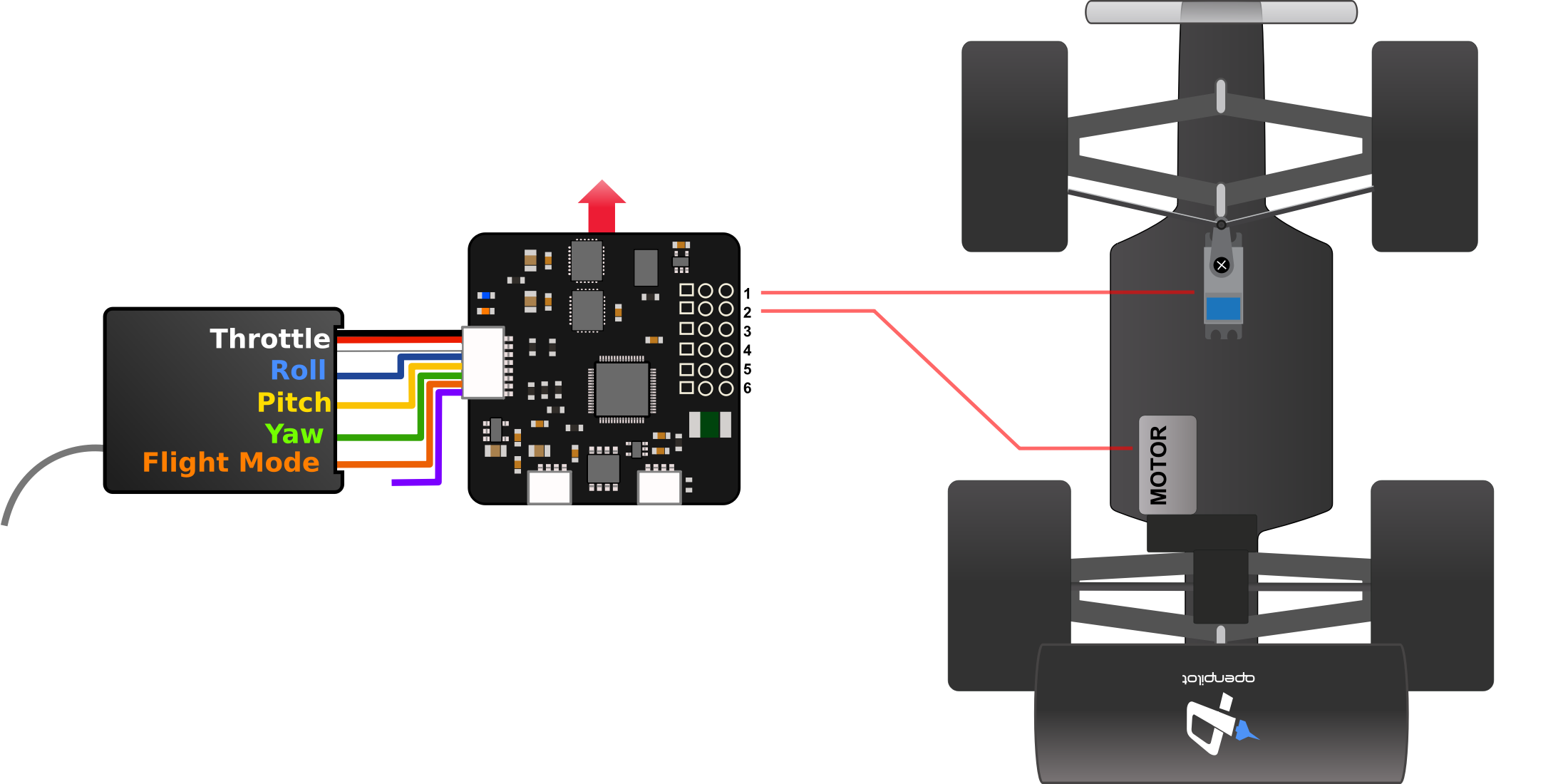
Проблема у меня заключается как раз в том, что сам контроллер видя (согласно данным GCS) сигналы, поступающие от приёмника, упорно утверждает (опять же согласно GCS), что их нет. Все подключения делал соответственно данной картинке из OpenPilot GCS:
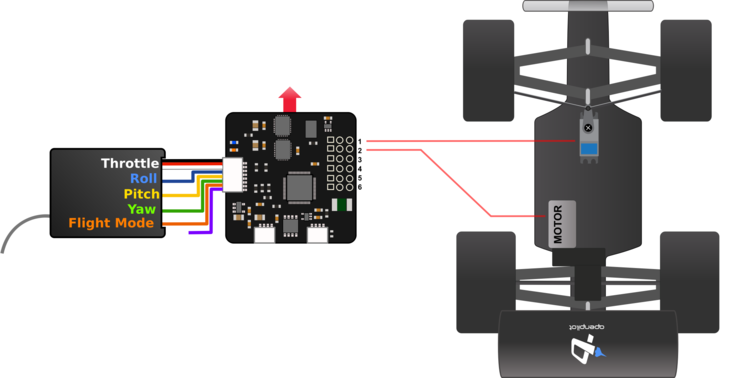
Проблема у меня заключается как раз в том, что сам контроллер видя (согласно данным GCS) сигналы, поступающие от приёмника, упорно утверждает (опять же согласно GCS), что их нет. Все подключения делал соответственно данной картинке из OpenPilot GCS:
Соответственно армиться контроллер толи не желает, то ли еще чего, но при этом пытается осуществлять стабилизацию курса дергая сервой.
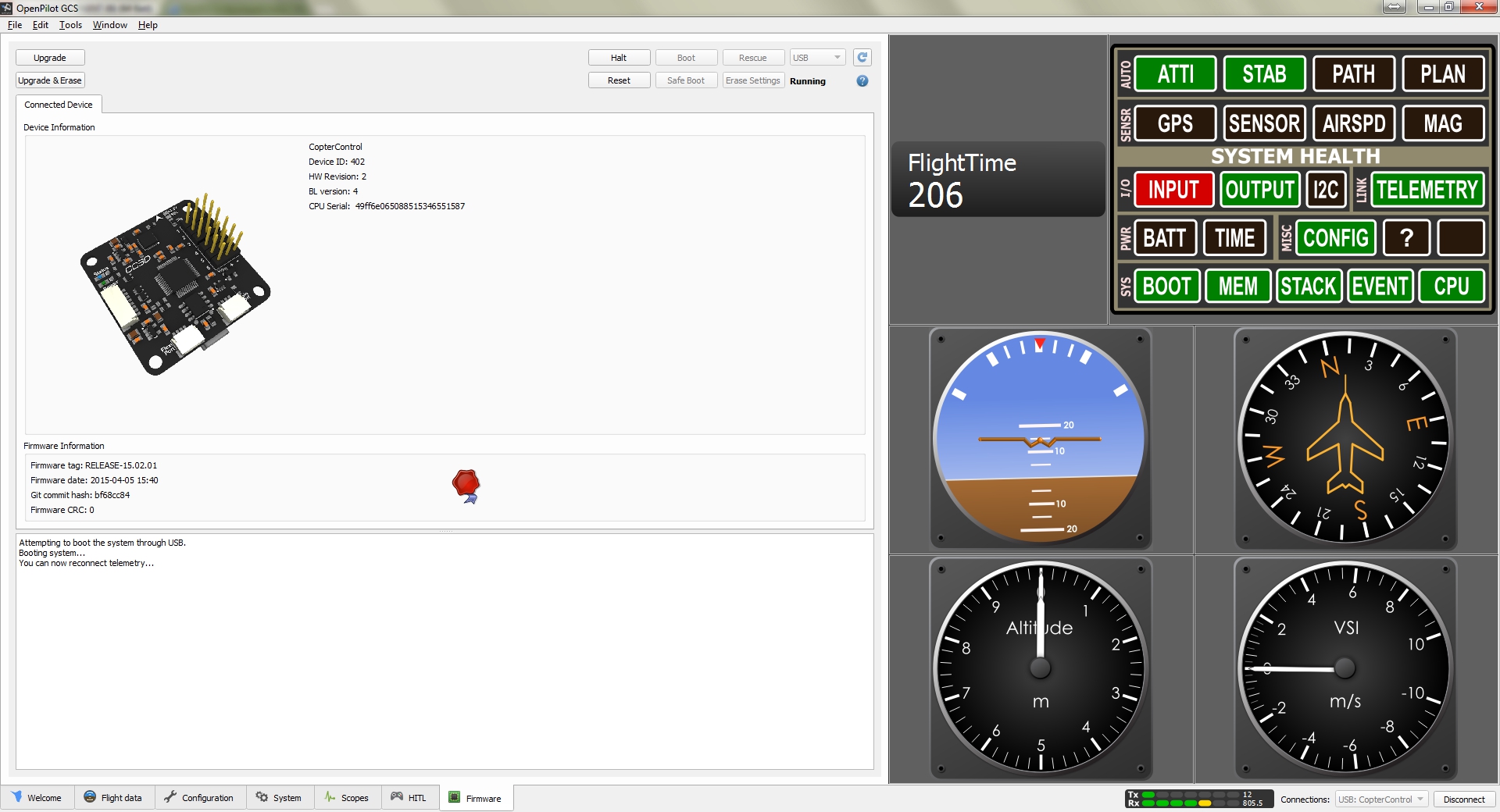
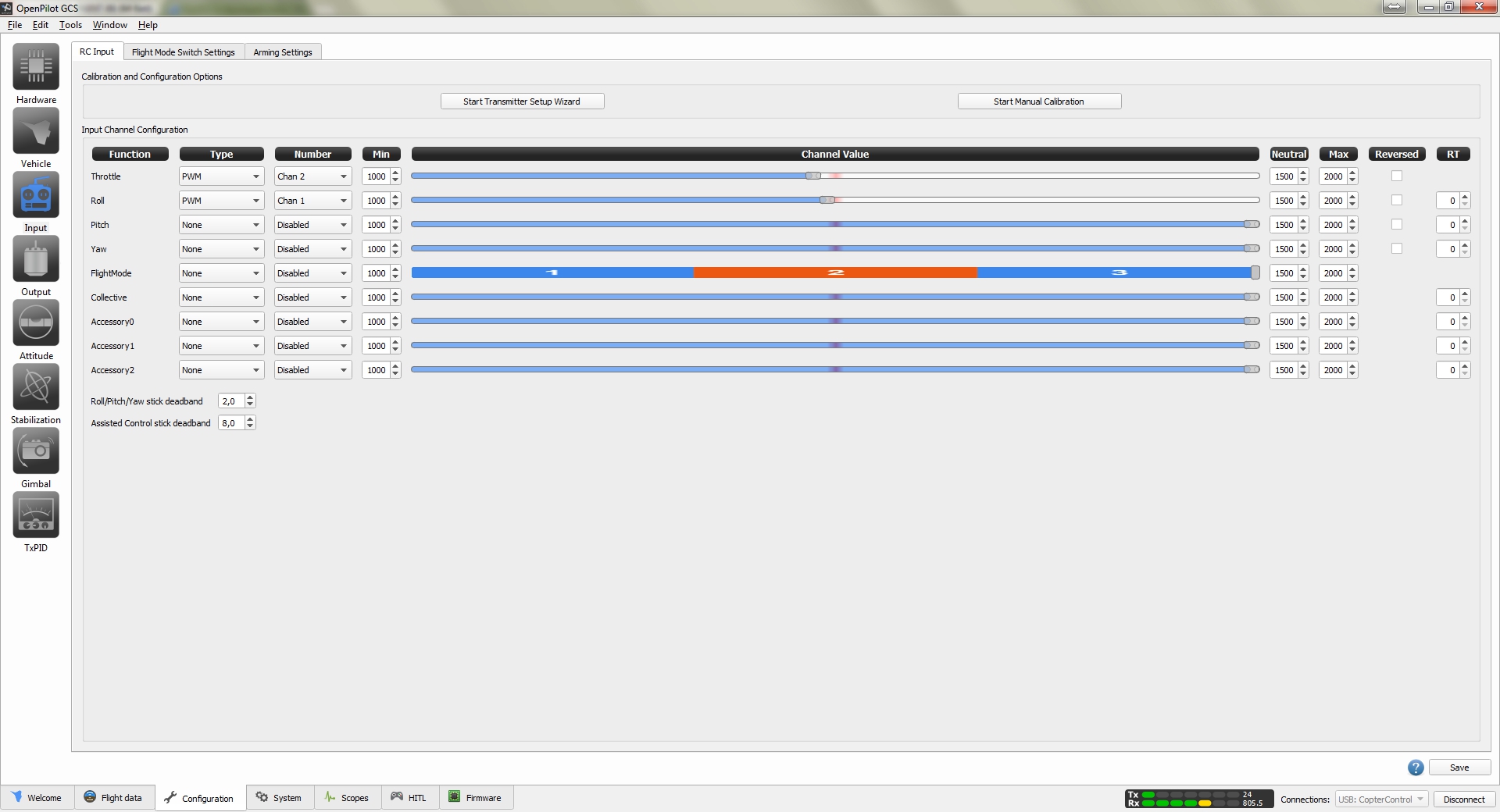
Ниже выкладываю скрины окон настройки входных и выходных сигналов
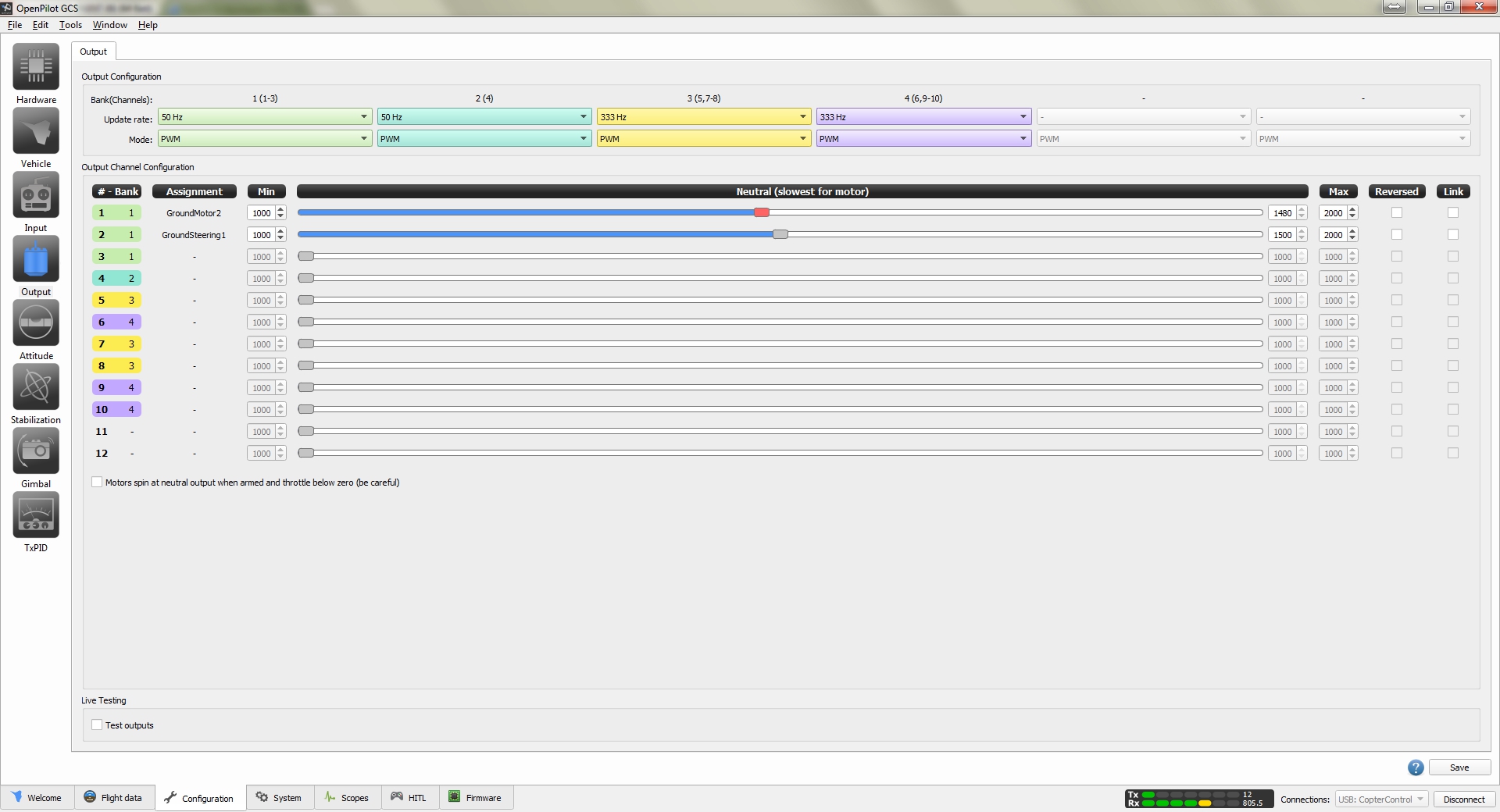
Если изменять параметры выходных сигналов в тестовом режиме, регулятор мотора и серва совершенно сопкойно реагируют на них.
Да и еще. При первичной настройке (через мастер настройки) после конечных настроек, мастер, как и полагается, предлагает настроить аппу. Но при этом он либо не запускает её настройку, либо предлагает использовать 4х канальную самолётну аппу.
В общем я четыре дня бьюсь над настройками, но, видимо, что-то делаю не так.
Ребята, помогите, пожалуйста, разобраться в этом чуде техники.













Я пока что добился постоянного арминга. Но при этом плата постоянно уходит в фейлсейф. Хрень какая-то.
Напиши если получится.
Блин. Ну не покупать же ради этого многоканальную аппу.
Бут я смотрю у вас вроде актуальный (если у вас не REVO, для неё свежий бут - номер 5).
Остается одна догадка - срисуйте ваши текущие настройки (но не в файл, загрузка файла всё вернет назад). И пройдите визард заново с стиранием параметров и прошивкой контроллера (всегда пропускал этот пункт в визарде).
После этого всё настроилось адекватно.
Я именно так и делал с самого начала. Изначально у меня была 3я версия загрузчика. Позже, я даже делал не просто стирание и зашивку нового микрокода, а восстановление через кнопку "rescue" (кажется так называется).
Ну да ладно. Сегодня опытным путём окончательно убедился в наличии косяка в прошивке от OpenPilot. Ну во всяком случае в релизе 15.02. Видимо в OpenPilot (пока что сам код еще не смотрел) нет разделения на самолётную, мультироторную и прочие части. Прошивка одна для всех, просто GCS для каждого типа транспорта генерирует микшеры и записывает их в нужный раздел. И собсна все.
Получается такой вывод из того, что при отсутствии хотя бы одного из сигналов от приёмыша на первые пять (!) входов CC3D, он просто уходит в фейлсейв. А пять каналов это что (?). Правильно, миниму для обеспечения работы любого ЛА со стабилизацией. Да, без сигнала по каналу плётного режима CC3D тоже не хотит работать. Вот в чем косяк. Вот где собака зарыта.
ЗЫ. Кто нибудь владеет ссылкой на ту тему OpenPiolt'овского форума, где обсуждают прошивку или её косяки, тобишь багрепорт?
Я бы рекомендовал Вам залить прошивку через Mission Planer.
Когда я ставил пиксхавк на машинку, просто выполнил все калибровки, которые предлагал мастер настройки и поехал по точкам с планшета, домой тоже возвращалась.
Такие контроллеры как у Вас тоже через мишнпланер можно прошивать, я пробовал.
Более того, я находил ветки на форумах с похожими проблемами, но там все решалось простым вводом фиктивных каналов. У меня же этот способ не проходит, плата уходит в фейлсейв, а без них просто не армится.