После постройки первого квадрокоптера мои требования к нему росли. Напихивая на него все больше электроники квадрокоптер вскоре просто не смог ее поднять. Было решено переделать его с 250 под 450 размер. 

Переделка началась с рамы. Я решил не покупать ее, а сделать сам.
Спустя два дня был готов чертеж. По моим расчетам рама должна складываться. и Я приступил к изготовлению деталей.
и Я приступил к изготовлению деталей.
Центр рамы был выпелен из 2мм стеклотекстолита.
Далее я привинтил эти детали и сделал стойки.

 Лучи я сделал из алюминиевых трубок.
Лучи я сделал из алюминиевых трубок.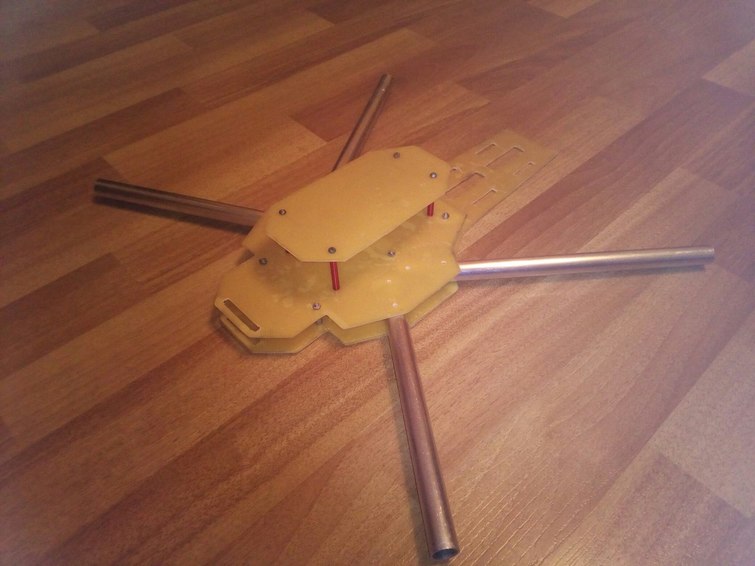 И складывается это примерно так:
И складывается это примерно так:  После того как просверлил отверстия я установил моторы.
После того как просверлил отверстия я установил моторы. 
 Я сам не ожидал, но рама оказалась мега-прочная!
Я сам не ожидал, но рама оказалась мега-прочная!
Переставив электронику со старого квадрокоптера и настроив ПИДы состоялся первый полет!
Квадрокоптер вел себя очень стабильно и легко управлялся.
Было решено сделать ноги. Вырезав из пенопласта параболу я начал к ней послойно приклеивать полоски стеклотекстолита. Спустя шесть 0.5мм слоев вышла дуга и к ней были привинчины две рейки. Такие шасси крепятся на квадрокоптер при помощи двух винтов.
Такие шасси крепятся на квадрокоптер при помощи двух винтов.  Заняла переделка у меня неделю.
Заняла переделка у меня неделю.
Самое крутое что стоило это 3400руб! А именно аккумулятор, моторы и трубки для рамы.
Ну и под конец я хотел сказать о том что мне 14 лет и познал я квадрокоптеры в 109 Лицее г.Екатеринбурга.
Там шикарный клуб робототехники и любитилей бпла.
Если появятся вопросы то я на них с радостью отвечу)
Даже не знаю как закончить статью( Пусть это будет конец.
Спустя два дня был готов чертеж. По моим расчетам рама должна складываться.
и Я приступил к изготовлению деталей. Центр рамы был выпелен из 2мм стеклотекстолита.

Далее я привинтил эти детали и сделал стойки.
 Лучи я сделал из алюминиевых трубок. И складывается это примерно так: После того как просверлил отверстия я установил моторы. Я сам не ожидал, но рама оказалась мега-прочная!
Лучи я сделал из алюминиевых трубок. И складывается это примерно так: После того как просверлил отверстия я установил моторы. Я сам не ожидал, но рама оказалась мега-прочная!Переставив электронику со старого квадрокоптера и настроив ПИДы состоялся первый полет!
Квадрокоптер вел себя очень стабильно и легко управлялся.
Было решено сделать ноги. Вырезав из пенопласта параболу я начал к ней послойно приклеивать полоски стеклотекстолита. Спустя шесть 0.5мм слоев вышла дуга и к ней были привинчины две рейки.
Такие шасси крепятся на квадрокоптер при помощи двух винтов. Заняла переделка у меня неделю. Самое крутое что стоило это 3400руб! А именно аккумулятор, моторы и трубки для рамы.
Ну и под конец я хотел сказать о том что мне 14 лет и познал я квадрокоптеры в 109 Лицее г.Екатеринбурга.
Там шикарный клуб робототехники и любитилей бпла.
Если появятся вопросы то я на них с радостью отвечу)
Даже не знаю как закончить статью( Пусть это будет конец.













И как только прикрутишь камеру к коптеру - замучает желе.
Я понимаю, что собрано было "из того что есть". Просто на будущее совет - для мультикоптера нужно другое крепление пропеллеров. В случае с вашими моторами даже стяжки будут лучше, чем цанги. Цанги лучше оставьте самолетчикам, там не такие нагрузки по снятию пропеллеров с вала.
За старание ставлю +. Мне бы было лениво пилить такую раму. А учитывая неплохую массу - нормальная заявка получилась.
Мой долголетик весит те же 1300 (но без акков), имея при этом:
Раму 650 размера, 17" пропеллеры, движки на 360 кв, ФПВ, АРМ с телеметрией. Летает в зависимости от поставленного акка (акков) 35-40-45 минут. Причем питание у меня 5S.
Сейчас на него ставлю 3-осевой подвес с камерой, масса будет больше грамм на 250, это немного скажется на времени полета.
И сделано это как раз из квадратного профиля 1.2х1.2х0.9. Для вашей рамы наверное можно взять даже не 12, а 10 профиль - будет ещё легче.
Трубка в качестве лучей не плоха, просто её сложно ровно просверлить, и сложно к ней крепить моторы. Пробуйте, летайте, о достоинствах и недостатках круглого/квадратного профиля поговорим крашиков через 5-10...
Если сбита центровка - коптер в простых режимах будет тащить в какую-нибудь сторону. При более "интеллектуальных" режимах полета - один-два мотора будут работать с большей нагрузкой, нежели остальные (так как им нужно компенсировать перевес на их сторону), что обязательно скажется в критической фазе полета. Если летать неторопливо, блинчиком - то тут конечно полетит почти что угодно.
А вот захоти исполнить какой-нибудь флип/ролл - тот мотор (или два мотора), который работал с повышенной нагрузкой - может не справиться, в результате чего весь коптер может рухнуть. Если хватит высоты - то полетный контроллер может и успеет стабилизировать, а может и не успеет.
Единственное.Не плохо было бы назвать имя наставника,раз он подготовил такого талантливого ученика :)