Однажды с другом купили попробовать машинку масштаба 1/16 и затянуло…


Перешел на масштаб 1/10, переделывал из 4х4 в 6х6, катал детей на санках и коньках за машинкой.
Но все было как-то стандартно, а инженерная мысль не давала покоя.
Решил сделать шасси с особенностями, которые редко увидишь в масштабных моделях.
Запчасти старался выбирать совместимые с моими остальными машинами для унификации.(Traxxas Summit, E-Maxx)
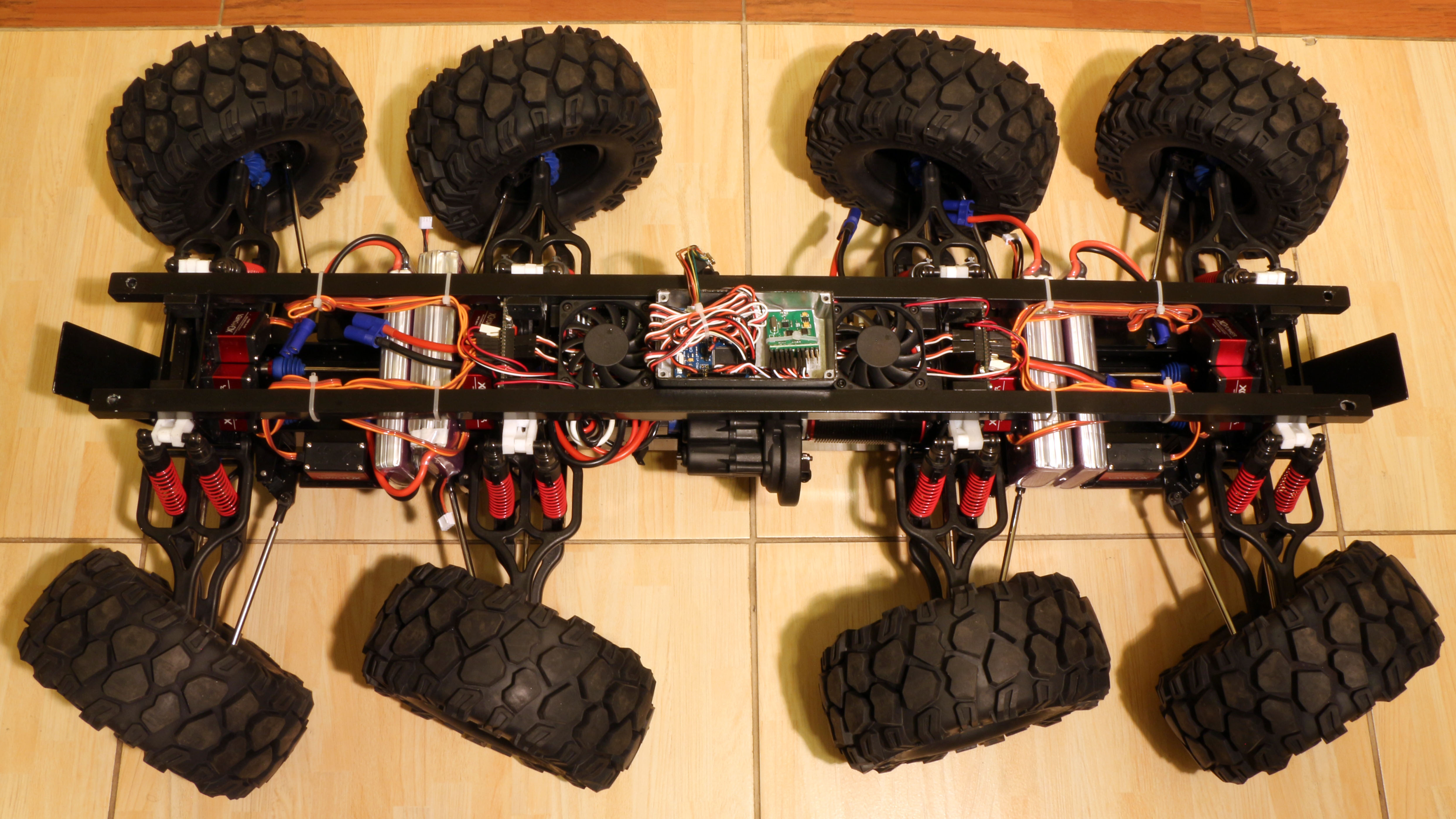
Итак шасси 8x8x8.
Трансмиссия бортовая - у левого и правого борта свой электромотор. (такая трансмиссия применяется в гусеничной технике и некоторых внедорожниках).
Это позволяет передавать необходимый момент на колеса в повороте без применения дифференциала. Т.е. дифференциал реализуется программным образом в контроллере управления. Такой тип трансмиссии позволяет осуществлять разворот на месте. Не требуются дополнительные блокировки для повышения проходимости.
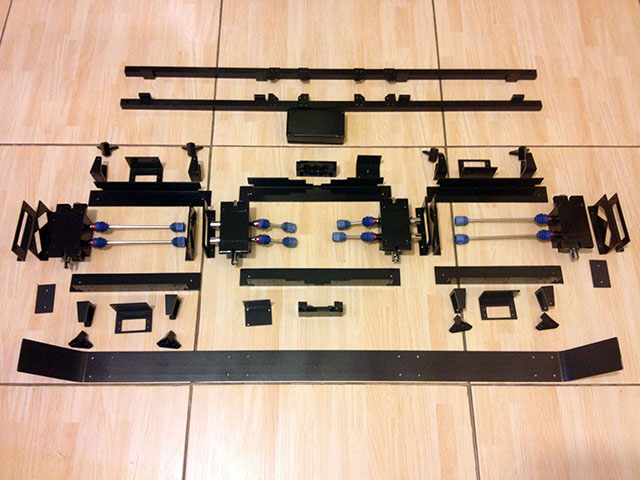
Колесные редукторы пришлось изготавливать самому. Точнее сделал чертеж и отдал фрезеровщику.

Сам редуктор очень просто устроен - в нем по две конические шестерни на колесо.



Каждый редуктор является проходным - т.е. можно сделать шасси с различным количеством ведущих осей, без дополнительных механизмов.
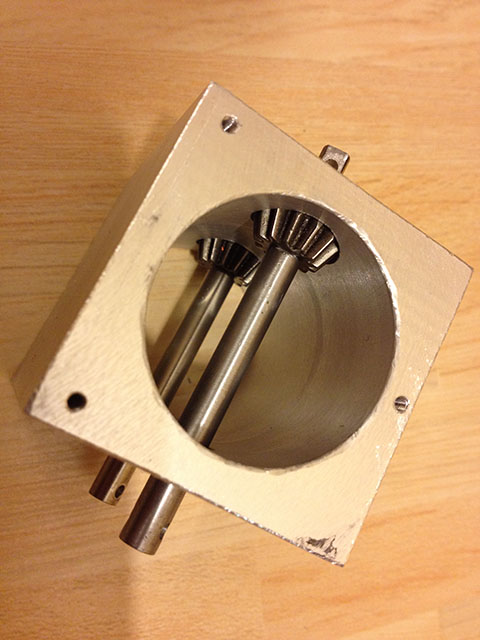
Редуктор с карданами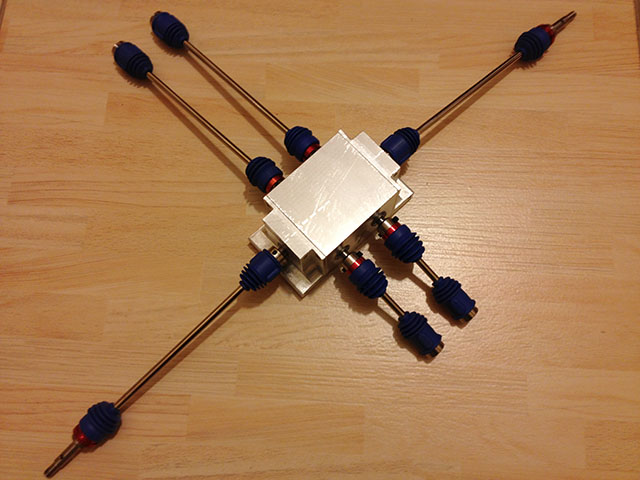
Редуктор является силовым элементом, на него крепятся все детали подвески. Редуктора соединяются между собой алюминиевым уголком.

Коробки скоростей стандартные двух скоростные от радиоуправляемых машин такого класса.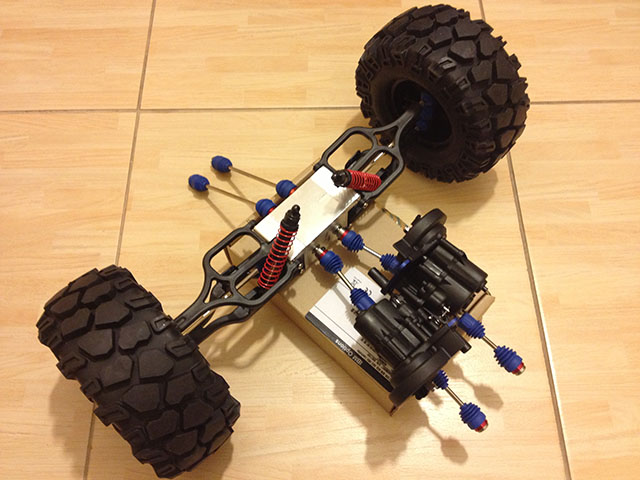
Проверка редукторов.
Моторы применил бесколлекторные трехфазные с сенсорной обратной связью, для плавного управления на низких оборотах. Коллекторные не стал применять из-за низкой надежности.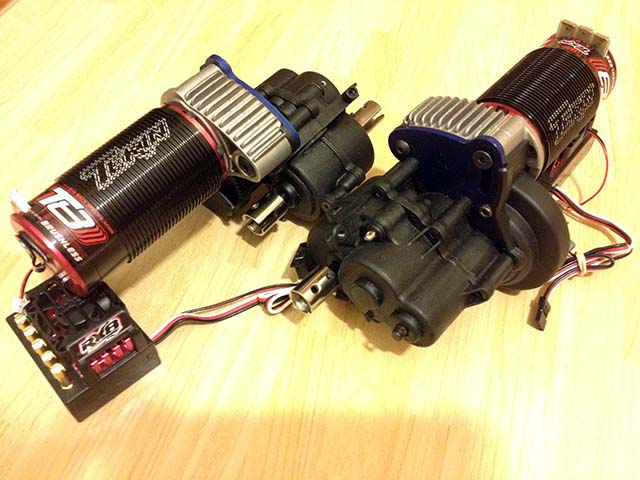
Контроллеры моторов дополнительно загерметил термокомпаундом КПТД.
Крепление моторов

Подвеска колес с электрически изменяемым клиренсом.
Каждое колесо соединено с шасси через пружину и масляный амортизатор, но не напрямую, а через рычаг с электроприводом.
Это предварительная версия.
На каждое колесо используется свой канал управления.
Это позволяет управлять не только вертикальный уровень, но и менять горизонт.
Т.е. осуществлять продольную и поперечную устойчивость кузова.
В подвеске четыре режима:
1. Полностью отключенные сервоприводы.
2. Статическое управление клиренсом и горизонтом.
3. Прогрессивная поперечная стабилизация в поворотах (шасси накреняется внутрь поворота, как мотоцикл).
4. Гиростабилизация.
Минимальный клиренс. 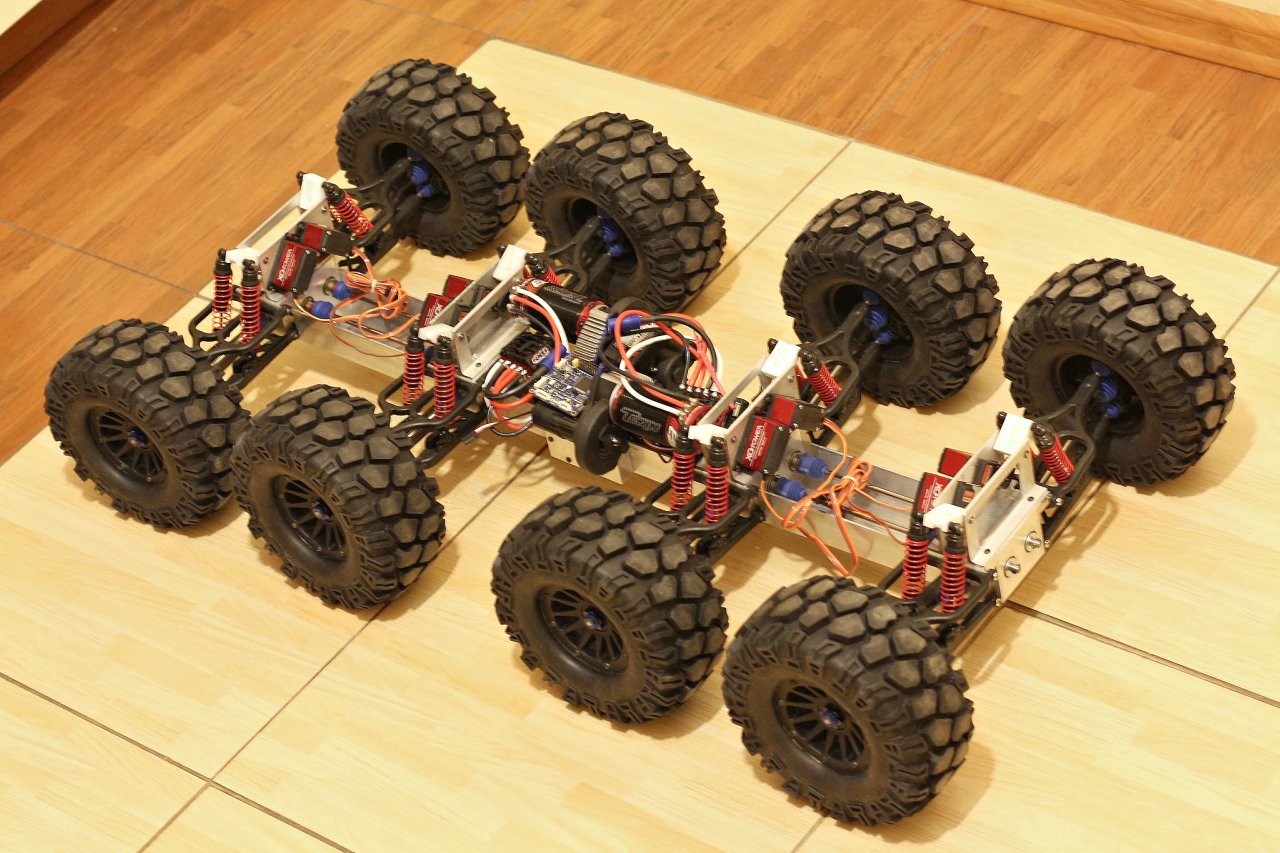
Максимальный клиренс.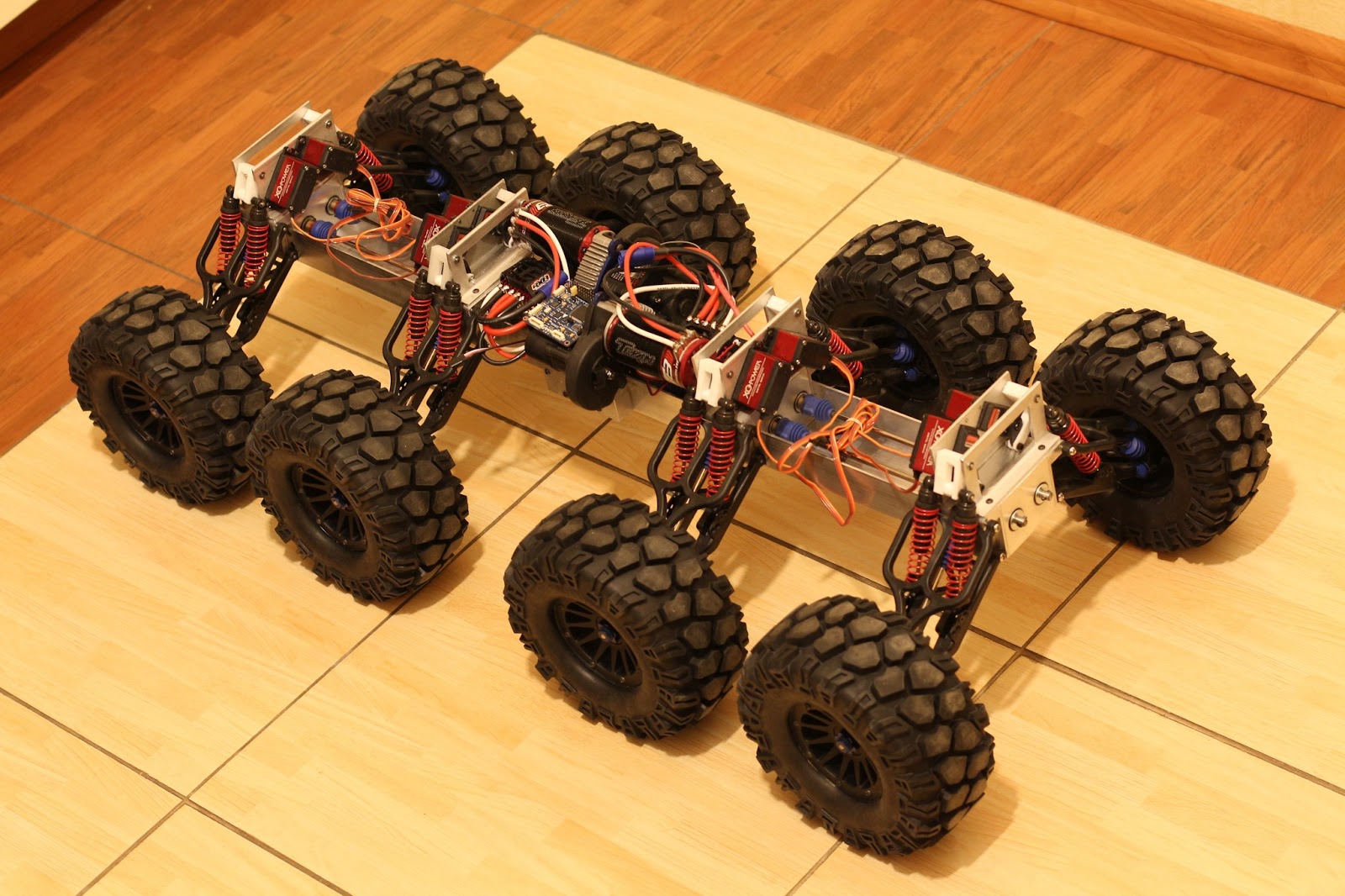
Проверка электроподвески.
Проверка гироскопической обратной связи.
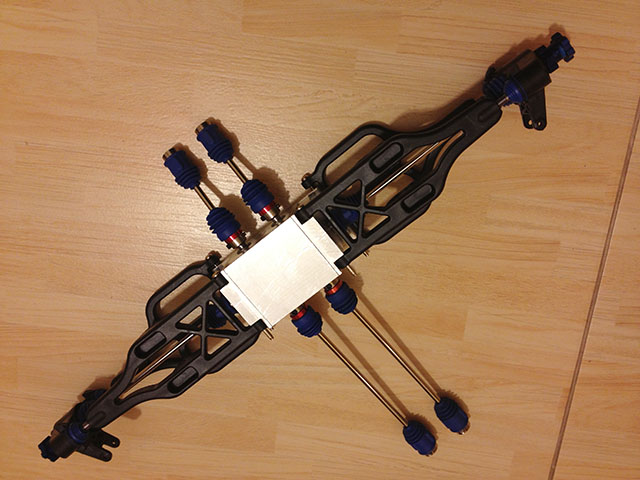
Рулевых механизма четыре. Все колеса поворотные. На один сервопривод подключено по два колеса, но не с левого и правого борта, как на классических машинах, а соседние по одному борту. Например переднее правое соединено со средним передним правым. Далее будет пример различных комбинаций управления.
Держатели рулевых тяг пришлось сделать самому.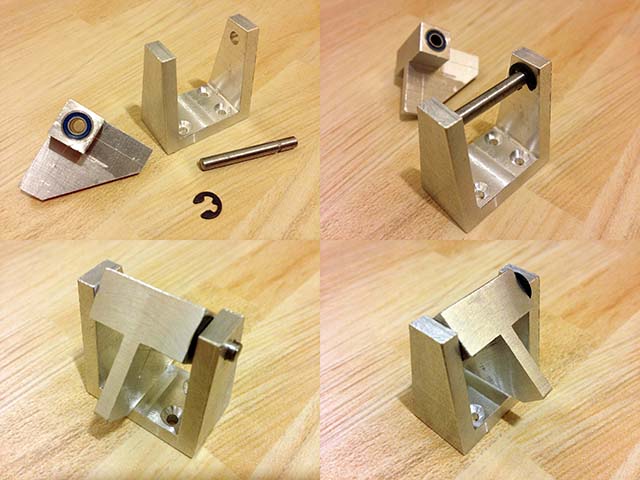

Я сделал четыре режима рулевого управления:
1. Классическое - поворачивают только передние колеса.
2. Поворачивают передние и задние колеса, но задние зависят от скорости движения. Для повышения маневренности на малой скорости сильно поворачиваются, а на большой скорости практически не поворачиваются для повышения устойчивости.
3. Колеса фиксируются в среднем положении, руление осуществляется изменением момента в бортовой трансмиссии.
4. Дополняет третий вариант складыванием колес плугом для разворота на месте с меньшим трением.
На все потребовалось 12 сервоприводов.
Сервоприводы высоковольтные и подключены напрямую к 2s LiPo аккумуляторам.

Самодельные части после покраски
Все функции управления реализовал на квадрокоптерном контроллере CRIUS AIO Pro на базе кода Arduino Multiiwi 2.2.
В контроллере много портов ввода/вывода и готовая трехосная гиро система.
Контроллер находится в центре шасси сверху в герметичном алюминиевом корпусе, вместе с ним восьмиканальный приемник системы радиоуправления.
Система радиоуправления восьмиканальная самолетная Turnigy 9x.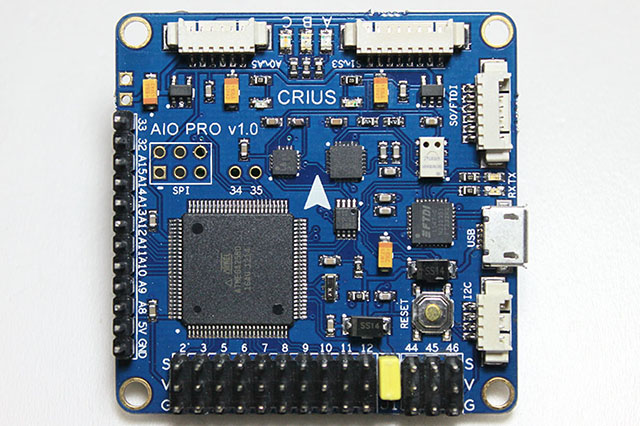
Дополнительно планирую добавить датчики оборотов на моторы, чтобы реализовать алгоритмы устойчивости в поворотах, противобуксовочный режим, а так же антиблокировку при торможении.
БТР-80 получился случайно - дело в том, что изначально я делал просто шасси 8x8 и когда задумался над корпусом, то оказалось, что его основные размеры совпали с БТР.
Корпус сделал из оцинкованной стали пайкой. За основу для выкроек взял бумажную развертку от чехов масштаба 1/25 и пластмассовую модель "Звезда" для склейки масштаба 1/35. Нижнюю часть пришлось частично срезать для совместимости с моим шасси, поэтому получился немного приплюснутым.





Внутреннюю полость для плотности заполнил монтажной пеной.
Фары сделал в медном корпусе для хорошего охлаждения. Внутри светодиод CREE XM-L T6 с драйвером.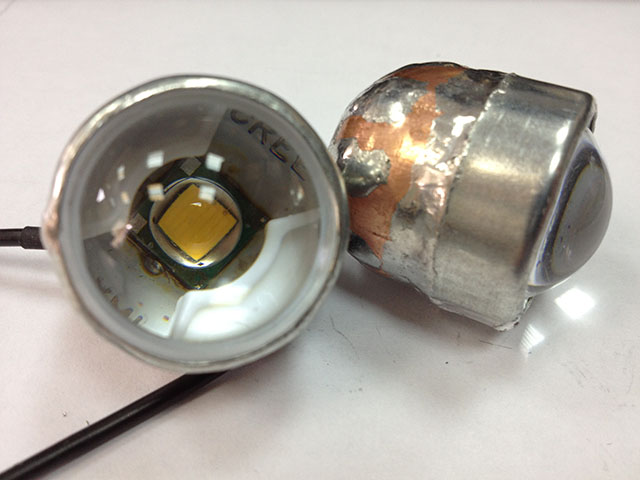
После покраски. 

К сожалению корпус получился значительно тяжелей, чем запланированная грузоподъемность шасси.
Постараюсь сделать легкую версию из лексана.
Пока пришлось заменить пружины на более мощные, а электроприводы в подвеске использовать кратковременно. 



Пушку пока ставить не стал, боюсь мои дети могут пораниться. Возможно сделаю мягкий муляж.

ТТХ:
ВхШхД 1180x460x440мм (при максимальном клиренсе), колея 400мм
Клиренс меняется от 0 до 80мм. (со слабыми пружинами)
Вес: 21кг (из них корпус - 6 кг, шасси - 15 кг вместе с аккумуляторами)
Питание: два 3s LiPo 6000mAh на моторы, два 2s LiPo 6000mAh на сервы.

Видео процесса сборки
Рассказываю про основные особенности
Смотрим с 7:49 минуты про нестандартное применение машины )))
Первые испытания
В этом видео меняю клиренс
Старался изложить кратко.
Если, что забыл упомянуть, то веду блог про свои машины
http://www.krohpit.ru
Прямая ссылка на БТР http://www.krohpit.ru/2013/07/rc-btr-80-rus.html
Прямая ссылка на шасси http://www.krohpit.ru/2013/01/krohpit-8x8-gyro.html
Прошивка контроллера http://www.krohpit.ru/2012/12/crius-all-in-one-pro-krohpit-8x8.html
Жду вопросы, предложения дополнительных идей.
P.S. От идеи до модели прошел примерно год.
Машину сделал такую крупную, потому что моим детям нравится на санках на буксире кататься, а то у Summit 6x6 уже мощи не хватает. Семейство то пополнилось пока собирал машину )) Успел доделать как раз перед снегопадами.
Для дальнейших работ с электроподвеской сделаю 4х4 вариант этого шасси.













Было больше 100 минусов а стало всего 15 ???
Нет я не против статья отличная я сам за нее постваил +
Но что творится с минусами?
Ни чего не понимаю ...
Посмотрел по ближайшим статьям, то же минусов на много меньше стало!
Может администрация все таки разяснит нам свою позицию ?!!
По хоже админы взялись за чистку )))
Но позвольте, все таки откуда 100 минусов то было?
Вот такой бардак на нашем любимом ресурсе (((
Дом свой (в данном случае сайт), надо в порядке содержать и мусор хоть иногда из дома выметать. Тем более если людей к себе в дом приглашаешь ...
Иначе люди перестанут приходить ...
Волей не волей начинают закрадываться сомнения, о том, что это минусят пользователи.
Я в шоке, что это такое?
смотрите запоминаем результат, ставим сначала минус за статью - результат - 1, и минус 1 отображается в общем количестве минусов, далее исправляем свой минус, итого рейтинг статьи не изменился, а вот в рейтинге минусов, минус в общем зачете так и остается, далее ставим +, рейтинг статьи +1, рейтинг плюсов тоже+1, а вот рейтинг минусов так и остается -1.
Т.е. человек может ради прикола, или не чайно навел мышкой на минус, потом исправил, а в рейтинг минусов засчитывает. На бонус я так думаю особо не влияет.
Получается, что реально заминусили эту статью около 50 человек, или 2-3 мультиаккаунта.
P.S. Так много минусов - это наверное из-за рекламы... народ у нас болезненно реагирует на чьё либо продвижение. Не может же быть столько ботов и мёртвых душ!?...
добавить в прошивку поддержку MIDI интерфейса и подключить к секвенсору или MIDI клавиатуре. Лапы БТР поставить на педали бочки, хэта и ведущего барабана.
Получится тру драм-машина ))
Если получится попробую небольшой видеоклип сделать.
А так думаю над модернизацией этой идеи.
Интересно попробовать червячные приводы - у них преимущество, что есть самоторможение для статического режима, но, возможно, невысокое быстродействие.
Еще делаю прототип полностью электромагнитной пружины/амортизатора. В машинах 1/1 уже есть подобные подвески.
пока пассивный вариант, т.е. вместо пружины разнополюсные магниты, а демпфирование за счет токов Фуко в медном корпусе. Магниты неодимовые шайбы силы N48, к сожалению самых мощных N52 не смог найти подходящих габаритов. Да, такие магниты подороже выйдут чем пружиномасляный амортизатор, но есть академический интерес.
Если есть матчасть, то не прочь почитать.
Дело в том, что для линейного перемещения получается вроде как гиперболическая зависимость силы.
прошивку поддержку MIDI,секвенсору или MIDI,педали бочки, хэта и ведущего барабана,тру драм-машина,
за счет токов Фуко в медном корпусе.
Магниты неодимовые шайбы силы N48, к сожалению самых мощных N52 не смог найти подходящих габаритов.
есть академический интерес.
линейного перемещения получается вроде как гиперболическая зависимость силы.
вы искренне верите что все понимают о чем речь?)))
за статью однозначно плюс,читал на рц-дизайне с самого рождения темы и до конца.
Читатели же с разными интересами
Роман, хотелось бы почитать что-нибудь про Ваш опыт работы с БПЛА, если конечно это не секретная информация и не комерческая тайна и т.п. Я думаю не только мне это будет интересно.
На тех кто отрицательно оценивает статью не обращайте внимание, это обычная зависть.
Брали японский квадрокоптер и делали на него комплексную систему управления на базе контроллера TI MSP430.
Сейчас уже и разрабатывать особо не надо - можно спокойно готовые узлы купить.
Тот же контроллер, что у меня на БТР позволяет сделать беспилотник.
Насчет плюсов что-то много очень обсуждений. ((
Не главное это.
Надеюсь мои технические решения помогут моделистам в своих идеях.
По мере испытаний раскажу про проблемные места.
До сих пор не дошли руки до настройки коэффициентов в гироскопическом режиме стабилизации.
Я так долго не запускал машинки, что даже про клиренс вспомнил в конце съемки )))