
Заказали следующее: в качестве мозга (полетного контроллера) была взята система APM 2.5, GPS антенна на модуле ublox NEO-6M, 4 двигателя 2217 930kv, под них регуляторы по 20 ампер, и прошивкой SimonK, аккумулятор липоля на 3.7 ампера, аппаратура Turnigy 9XR, и был собран самодельный ВЧ модуль на 433 мГц, LRS на базе atmega 328 в SMD корпусе и микросхемы самого генератора, купленная на AliExpress.
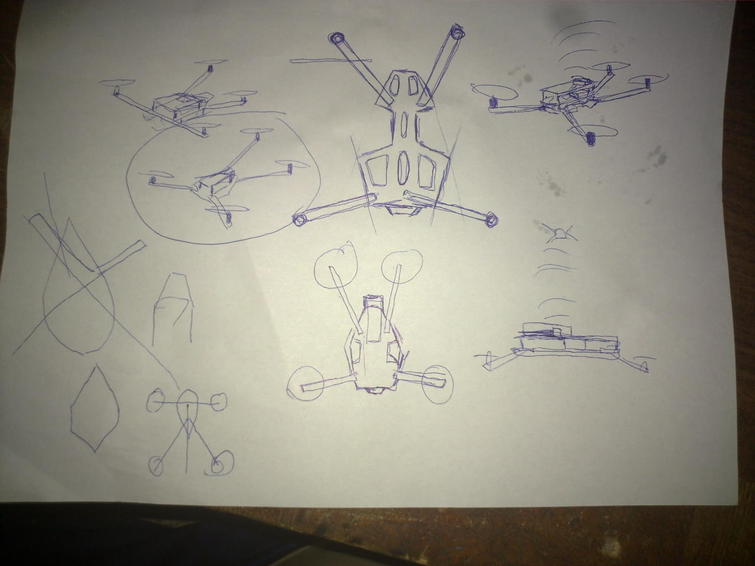
Не теряя времени приступил к набросками эскиза будущего коптера
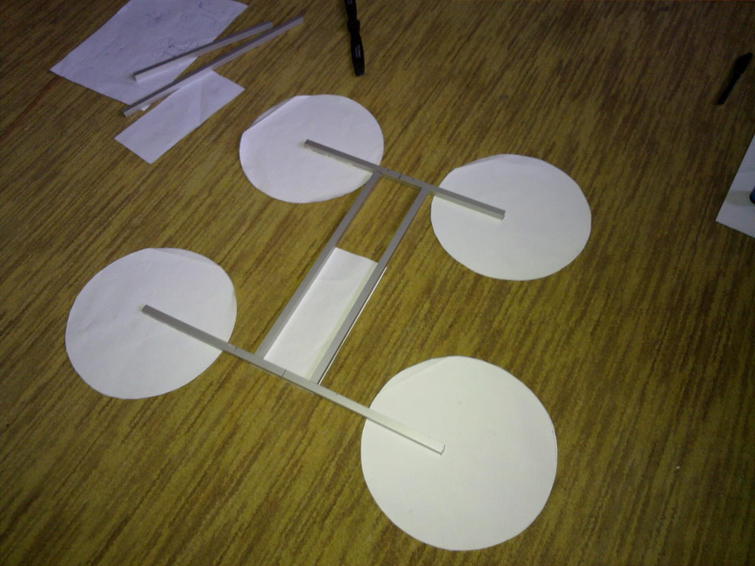
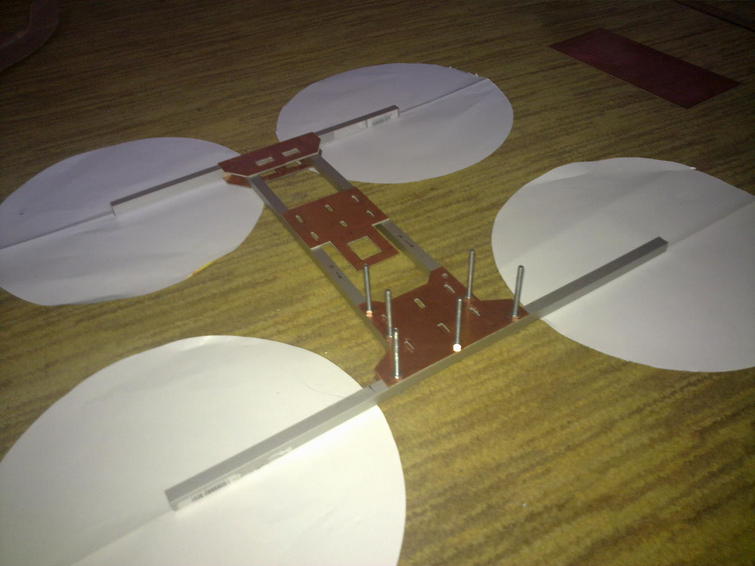
Затем приступил непосредственно к изготовлению самой рамы, в основе ее лежат алюминиевые рейки, куплены в строительном супермаркете и фольгированный стеклотекстолит (в дальнейшей обработке некоторых деталей, медное покрытие вытравил раствором хлорного железа)
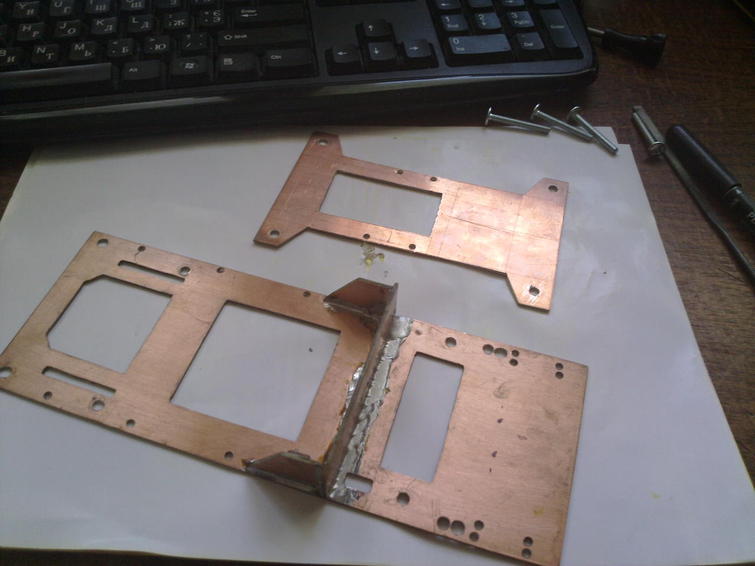
Немного мучаясь со сверлом и надфилями изготовил части двух этажей коптера, разделил аккумуляторный отсек от отсека где в дальнейшем будет размещаться GoPro путем припаивания поперечной стенки (она же служит как предохранитель в случае краша, чтоб аккумом не вынесло камеру)
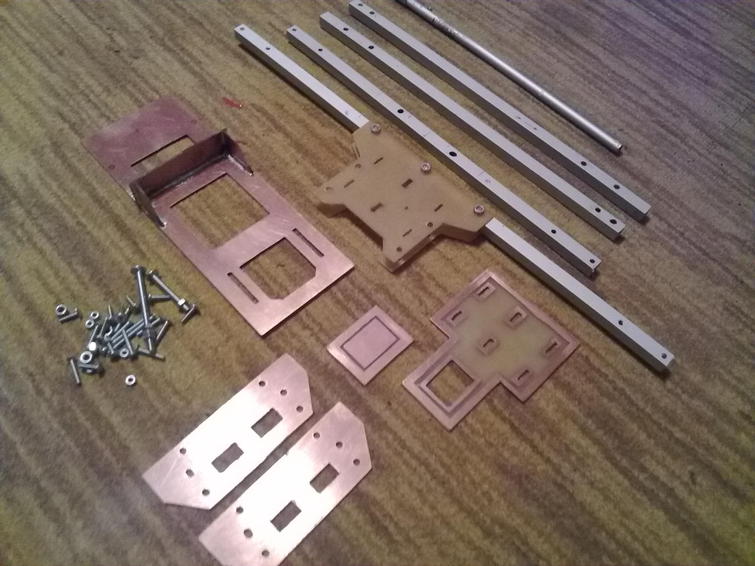
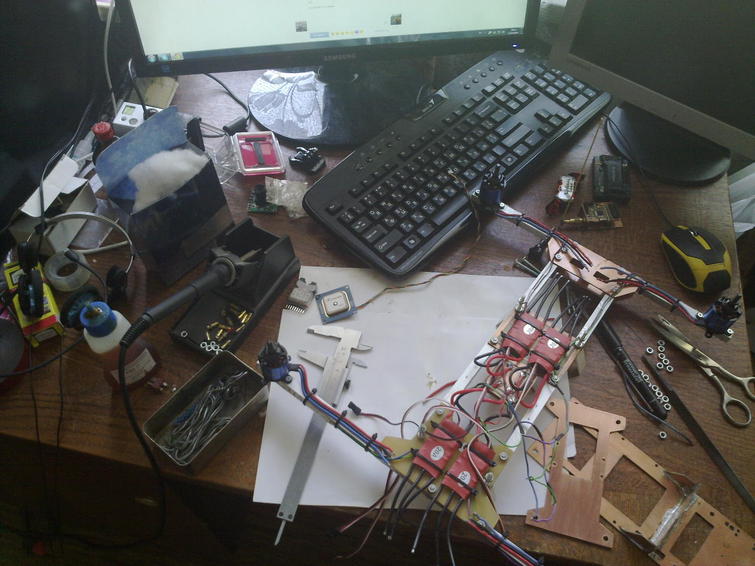
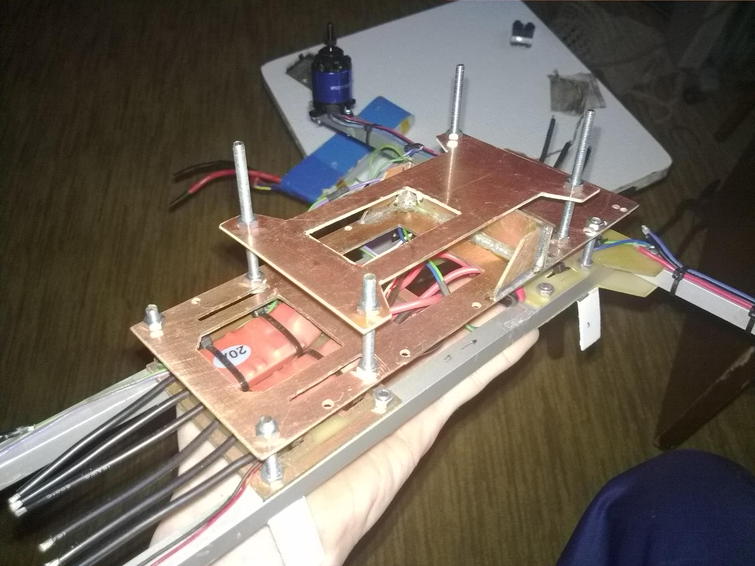
Изготовив все необходимые детали, приступил к сборке
Прикрепил регуляторы и припаял общее питание, подключил навигационные огни (чтоб легче было распознать его стороны в небе при полетах с плохим освещением)
После завершения сборки всей конструкции, приступил к установке другой аппаратуры
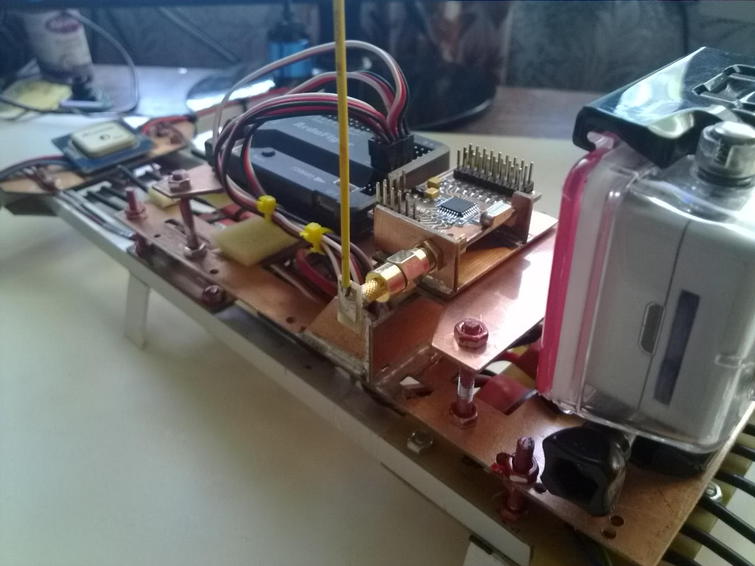
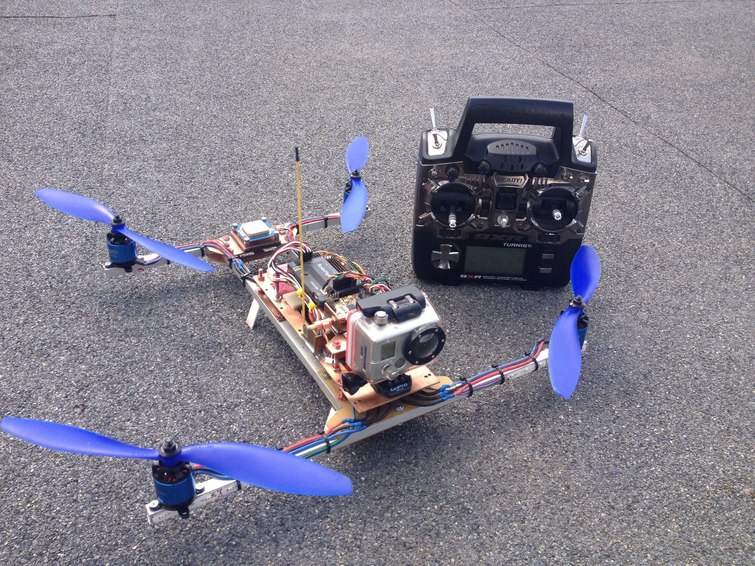
В конечном итоге получился вот такой няшный аппарат. Полетный вес получился достаточно большим, вместе с камерой 1300 грамм, согласитесь,кирпичик)
Затем приступил к прошивке и калибровки самого мозга, тут я конечно намучался...) с первого раза было сложновато разобраться... долго настраивал пиды и т.д но в конечном итоге довел дело до своего логического завершения и произвел первый полет)) с тестированием режима loiter (это удержание позиции) Рад был как слон, все-таки первые полеты) ну думаю вы меня понимаете... ) и обошлось без краша. На видео видно как коптер держал позицию без моего участия и внезапно его повело, мне кажется это поплыли показания GPS но несмотря на это коптер самостоятельно вернулся в свое исходное положение, а я отделался легким испугом :)
Спустя некоторое время которое мне потребовалось на обретения навыков пилотированияя стал заниматься съемками городских пейзажей, и постил их в местном паблике, где я являюсь одним из админов. Фотографии произвели неожиданную авацию публики, и я стал этому уделять больше внимания и продолжал снимать более эффектные фото, вот некоторые покажу вам :)
Андреевский собор


Наша мэрия


Памятник Шевченко

Район сокол

Памятник погибшим морякам, на набережной


Фото такого типа привлекло внимание городских фотографов, и они предлагают мне сотрудничество.. появились шансы заработать на съемках такого рода, коль это оказалось востребовано, я подумал, почему бы и нет.. :)
Понимая что такое занятие привлекает интерес многих людей, решил просветить в это дело свой техникум, учусь я на третьем курсе на электронщика, и у нас есть много ребят которых бы заинтересовала такая тема, решил устроить некую пропаганду и развитие этого увлечения в нашем городе (спустя некоторое время в наши ряды вступило еще 3 моделиста =) )
У нас там есть небольшое открытое пространство поблизости технаря, и я там устроил показательные полеты, собрались некоторые преподаватели и студенты, все с интересом наблюдали за происходящим) вот несколько кадров с полетушек))





В дальнейшем планирую построить коптер чисто для съемки, с расчетом установки дополнительной аппаратуры. На этом хочу закончить эту статью. Спасибо всем кто дочитал до конца, жду ваше мнение по поводу проделанной работы, советы, поправки, и аргументированную критику. Не судите строго, это моя первая статья. Еще раз спасибо! :)













А вот камеру, лучше установить по центру и сделать побольше ножки коптеру.
А мне как-то брезгливо плюхать коптер прямо на землю. Пока я сделал себе мини-ножки из 4 длинных винтов.
Для идущих по вашим стопам разместите более подрубную инфу о вашем коптере -
1. Список покупок - комплектующие с указанием цены и конкретных ссылок (где брали, или тут, на Парке)
2. ТТХ вашего сетапа - на какой батарее, какой взлетный вес (вы указали 1300) и какое время висения на месте (и среднее время полета вашим стилем)
Так же осмелюсь дать парочку советов.
1. Не знаю, как держат ваши пропадаптеры, насколько надежна гайка. Я бы для страховки от раскручивания поставил бы 2 стяжки на проп. У меня все гайки и коки рано или поздно раскручивались (в самый неподходящий момент) - после использования стяжек - ни одного краша по причине открутившегося пропеллера.
2. Провода до моторов уберите внутрь луча. Тем самым - улучшится внешний вид, коптер станет более удобен (я теперь за луч часто коптер таскаю)
3. Не увидел, какие вы лампочки и куда поставили для ориентирования положения квадрика. Я делаю полоски из светодиодной ленты на концы лучей (можно на всю длину луча) на нижнюю часть под прозрачную термоусадку. Сзади - красного света, спереди - белого. Некоторые вперед ставят тоже разных цветов (зеленый и синий например) - для различия правого и левого борта. Меня же устраивает схема по подобию автомобиля. Полоски ленты длиной 9 сантиметров (отрезается по три светика) - позволяют четко отслеживать ориентацию коптера днем до 50 метров, ночью - до 100 метров удаления. Дальше - коптер превращается в точку, управлять которой можно только "по-памяти" - велик риск потери. (от меня так улетало два коптера - при большом удалении и верховом ветре непонятно - где перед-зад и куда он летит)
4. Гопро - не очень хороший вариант для фотографий. Его рыбий глаз сводит на нет все его достоинства по качеству картинки. Или снимайте удаленные объекты (где не так будет заметен этот эффект), или ставьте дешевенький цифровой фотоаппарат. Или ищите другой объектив (есть для прохи объективы с меньшим углом зрения и без рыбьего глаза)
5. Не летайте над людьми. Падение на голову с высоты 5-10 метров ваших 1,3 килограмма - путь в больницу. Вам эти проблемы не нужны.
6. Не доверяйте сильно авторежимам. В последнее время наблюдаются сбои в работе GPS сети плюс некоторые глюки в прошивках Арду. Коптер может самопроизвольно полететь куда-нибудь. Всегда будьте готовы переключиться на STABILIZE режим. Должен выработаться рефлекс - что-то пошло не так - сразу стаб режим, посадка, дизарм.
7. Вот ещё - разглядел на ваших фотках - вы любите раъемы буллет. Это удобно для тестирования, но не очень надежно (нагрев при неплотном контакте, окисление, внезапное рассоединение, фабричный непропай коннектора). Посадите провода на пайку - так будет надежнее.
8. И ещё разглядел на фотках )))). У вас ЦТ снаряженного коптера сильно уехал вперед относительно геометрического центра рамы? Если есть такое смещение - то у вас передние движки будут работать на повышенных оборотах. Оно, конечно, летает и так - но когда ЦТ масс совпадает с геометрическим центром рамы - это лучше всего.
Всё это так - вброс мыслей в вашу голову для неспешной работы над ошибками.
Заинтересовала ваша RLS - собрали по материалам ветки на форуме РЦДизайна?
Светодиодную ленту приклеил с передних сторон балки, сзади красную, спереди зеленую, в небе читается отлично.
Что касается гопро, поставил то что было, а рыбий глаз можно убрать программами, но я эти как-то не интересовался, мне так нравится.
Сбои в работе ардуфлаера не замечал, стоит прошивка 1.3.1 и работает без пререканий.
Что касается разъемов, у меня на них только аккум, ибо нормальных нет, спаял что под руку попалось, а моторы все припаяны намертво)
Что касается центра тяжести, я его регулирую путем сдвига аккума по раме, вроде нормальное.
Спасибо за советы, многое намотал на ус)
Мне в последнее время удобнее светики ставить на нижнюю сторону луча. Очень часто коптер находится над головой - и так виднее КМК. Можно просто продублировать.
"Рыбий глаз". Если свяжетесь с ФОТОГРАФАМИ - то вашу проху придется убирать. Они не любят компьютерную обработку. Многие смотрят в служебные поля файла, чтобы определить, что фото - без коррекции. Будьте готовы тогда поставить цифровик, может с большим объективом. Фанаты таскают зеркалку под 2 килограмма весом (УХХ - недавно провел тест, мой квадрик может максимум 2,5 килограмма нагрузки поднять - но недолго, может акки были со слабой токоотдачей...)
Если у вас GPS режимы работают без сбоев - пусть так все и остается (взял на заметку номер версии - ответное спасибо)
Разъемы - значит я просто неправильно увидел. Мне показалось, что под синей термоусадкой у вас "пульки".
ЦТ - так у вас на фотках в статье нигде аккумулятор не виден ))))
RLS ?
аккум там zippy compact 3.7А 25С
LRS (Long Range System) собрал мой друг, он более продвинутей меня в электронике. И как я знаю у него там все на бумажках, источника не знаю
Кстати, по акку. Чтобы избежать разнобоя - я теперь ВЕЗДЕ ставлю разъемы XT-60. И при выборе акка больше не смотрю, какой у него силовой разъем. Разъем очень удобен - исключает переполюсовку и спокойно справляется с проходящими токами.
RLS - жаль. Я уже подумываю о ваттовом модуле 433 MHz JR формфактора.
Как только начнете отпускать от себя коптер подальше - подумайте над системами поиска. Когда от меня свалило два коптера в течение малого периода времени - купил себе Пеленг от Слона.
Насчет живучести фольгированного стеклотекстолита некоторые сомнения присутствуют, поскольку есть у фольги свойство при ударах отслаиваться, а у вас, как я понял, некоторые детали на фольге лишь и держатся. К примеру, за детали из обычного текстолита или гетинакса на эпоксидке собранные, будет при жестких посадках уже спокойнее, да и легче припоя смола выходит, на весе можно выиграть.
Ну и еще не совсем понятно - почему "такой неровный квадрат"? :)
Я когда расчитывал коптер, заточенный под видеосъемку, тоже насчитал около 1300 г.
Но лучше летай в поле., пока не наберешься опыта .