День добрый! Строю свой первый коптер и возник вопрос по функции compassmot, так как в интернете информация потиворечивая...Кто то делает без винтов, кто то с винтами...
Так как правильно эту функцию выполнить? С винтами или без?
Сначало сделал без винтов- поправка составила 3%. Потом попробовал с винтами - поправка 84%.
Контроллер AIOP v2.
И как себя будет вести коптер если наводки будут большие?
Так как правильно эту функцию выполнить? С винтами или без?
Сначало сделал без винтов- поправка составила 3%. Потом попробовал с винтами - поправка 84%.
Контроллер AIOP v2.
И как себя будет вести коптер если наводки будут большие?
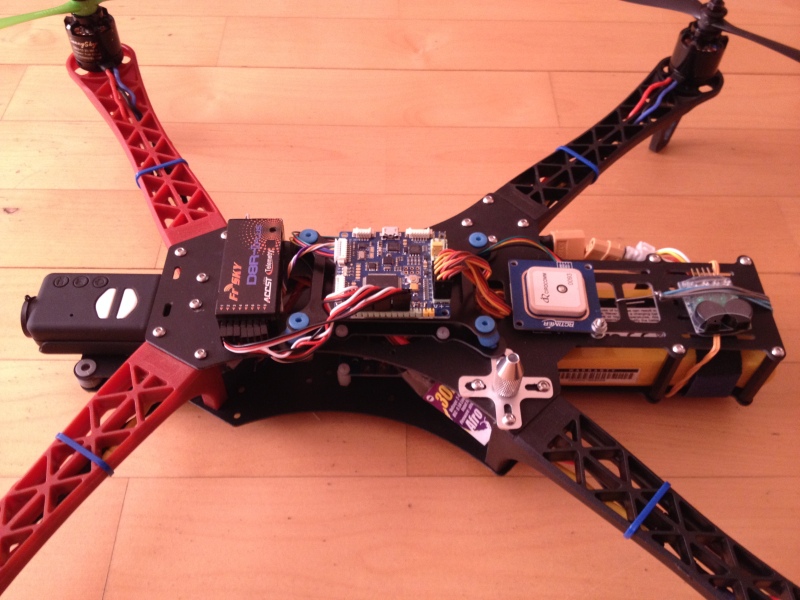
Расположение электроники примерно такое