Приветствую коллеги!
FPV полетами я начал заниматься два сезона назад, этот сезон третий.
Решил на досуге написать серию статей, которая может помочь тем, кто только что пришел в это хобби. В статьях будет отражен мой теперешний авиапарк, от простого к сложному. Прошу прощения за то, что вторую серию пишу спустя достаточно долго время после первой, но так уж сложилось. Летом сами понимаете много занимательного происходит и не до писанины =)
Эта статья про пепелац, который совсем не популярен в качестве FPV носителя, но учитывая мою тягу впихивать невпихуемое, да и просто потому, что он мне очень понравился... ему пришлось.
Так он выглядел до издевательств с моей стороны (фото с сайта магазина):
 PushyCat
PushyCat
Зачем на этом летать FPV? =)
FPV полетами я начал заниматься два сезона назад, этот сезон третий.
Решил на досуге написать серию статей, которая может помочь тем, кто только что пришел в это хобби. В статьях будет отражен мой теперешний авиапарк, от простого к сложному. Прошу прощения за то, что вторую серию пишу спустя достаточно долго время после первой, но так уж сложилось. Летом сами понимаете много занимательного происходит и не до писанины =)
Эта статья про пепелац, который совсем не популярен в качестве FPV носителя, но учитывая мою тягу впихивать невпихуемое, да и просто потому, что он мне очень понравился... ему пришлось.
Так он выглядел до издевательств с моей стороны (фото с сайта магазина):
 PushyCat
PushyCatЗачем на этом летать FPV? =)
После того, как освоил "близко и низко" на пепелаце описанном в предыдущей статье естественно захотелось большего. Быстрее, выше, сильнее! Да и элементарные фигуры высшего пилотажа от первого лица попробовать. Но при этом понимал, что для большого самолета и полетов на "дальняк" еще не готов, как морально, так и в плане технической подкованности. Посему концепция следующего пепелаца свелась в трем критериям: близко, низко и быстро!
Осваивать "Кошку" в полете от первого лица начал еще в прошлом году летом (крепкий все же пепелац оказался ;)), первые полеты не записывал ввиду отсутствия рекордера, но продолжаю летать на ней до сих пор, что как бэ намекаэ, что пилот не совсем криворукий, жива все же =), адреналина с избытком, в конце статьи видео полетов этим летом =) На самом деле основные проблемы возникли следующие: запуск с рук, который требовал квалифицированного "ракету носителя" ввиду достаточно большой взлетной скорости, ибо самому и кидать, и успеть подхватить было той еще эквилибристикой; второй момент - грамотная настройка автопилота, чтобы он адекватно рулил этим шустрым пепелацем в автоматических режимах, то бишь домой привел в случае чего, а не в землю воткнул. Но справился в итоге, по-поводу тонкостей настройки конкретного автопилота для этого самолета или похожих заинтересованным личностям могу рассказать отдельно по мере необходимости.
Критерии выбора:
Выбор носителя был обусловлен не столько прагматизмом, иначе был бы выбран какой-нить X-5, сколько эстетическими соображениями. Хотелось летать на "истребителе" =) И чтобы выглядел он соответственно. С другой стороны это должен быть не большой самолет, чтобы не вызывал проблем с транспортировкой и запуском с рук.
- размах крыльев: не более 1000мм не менее 700мм (иначе грузоподъемность не позволит напихать туда всю необходимую FPV начинку)
- крейсерская скорость не менее 60км/ч
- максимальная скорость не менее 100км/ч
- полетное время не меннее 10 минут в смешанном режиме (пилотаж, скоростной полет\спокойный полет на крейсерской скорости)
- материал - EPO, потому как жизнь у него будет тяжелая, клеить и клеить =)
Характеристики самолета:
- Размах крыла: 750мм
- Длина: 865мм
- Полетный вес: 475г (в штатной комплектации, на самом деле врут и весит он 550гр. с батареей), с FVP начинкой вес составил 800гр.
- Площадь крыла: 11.50дм2
- пропеллер 5х5
- полетное время около 10 минут
- запас хода около 10км
- крейсерская скорость 60-70км\ч
- максимальная скорость 110км\ч
Сервы, которые шли в комплекте сразу ушли в мусор, т.к. мерзли зимой и вообще были из трухи сделаны.
Но хватит о грустном!
Красавец, не правда-ли? =)

Про начинку:
- регулятор хода, шел в комплекте, 40А, 2А BEC, Phoenixtech некий, учитывая, что мотор в статике максимум кушает 15-16А - хватает выше крыши с запасом. Запас видимо был с рассчетом на то, что размещаться в штатном варианте должен был внутри фюзеляжа без обдува. В итоге, учитывая дефицит пространства, переехал на брюхо, вот так:

- мотор штатный, см. выше ссылку под фото пепелаца из магазина, но... когда я его покупал в комплекте пришел не тот мотор, что там нарисован, а вот такой
- сервы: руль высоты, элероны
- приемник РУ - 2.4GHz FrSky, модификация уже не продается к сожалению, модель не помню, выколупывать и смотреть - лень, не телеметрийный, 7 PWM каналов и 8 каналов по CPPM. Используется выход CPPM.
- ходовая батарея 1300mAh 3S 25C
- видео-батарея 180mAh 3S
- автопилот ArkBird, подключен по CPPM
- видео передатчик Bevrc 400mW 1.3GhZ
- видео антенна 1.3GHz Vee antenna
- курсовая камера Fatshark 600TVL High Resolution
Автопилот был выбран именно этот в том числе (кроме его многих достоинств) и потому, что позволяет установку повернутым на 90 градусов в продольной оси, иначе не поместился бы никак.
Остальная начинка более-менне стандартная для не больших самолетов. Согласитесь, вкорячивать на пепелац размахом 750мм антенну РУ 433MHz - мягко говоря проблематично, да и 2.4GHz с бустером на земле пробивает до 5км - минимум (зависит от антенны на передатчике и на пепелаце), чего учитывая запас хода данного индивидуума хватает с большим запасом.
Видео антенна, передатчик и диапазон 1,3GHz с линейной поляризацией опять же была выбрана исходя из минимальных габаритов. Можно было бы попробовать и 5.8GHz, но учитывая, что большинство моих пепелацев имеют передатчики 1,3GHz - просто не хотелось разводить зоопарк. Опять же не "клевер" ввиду габаритов. Но этот момент не навязываю.
Камера выбиралась в первую очередь по наименьшим габаритам и весу, качество картинки достаточно посредственное, в чем можно убедиться посмотрев видео ниже. Но в принципе летать можно, привык.
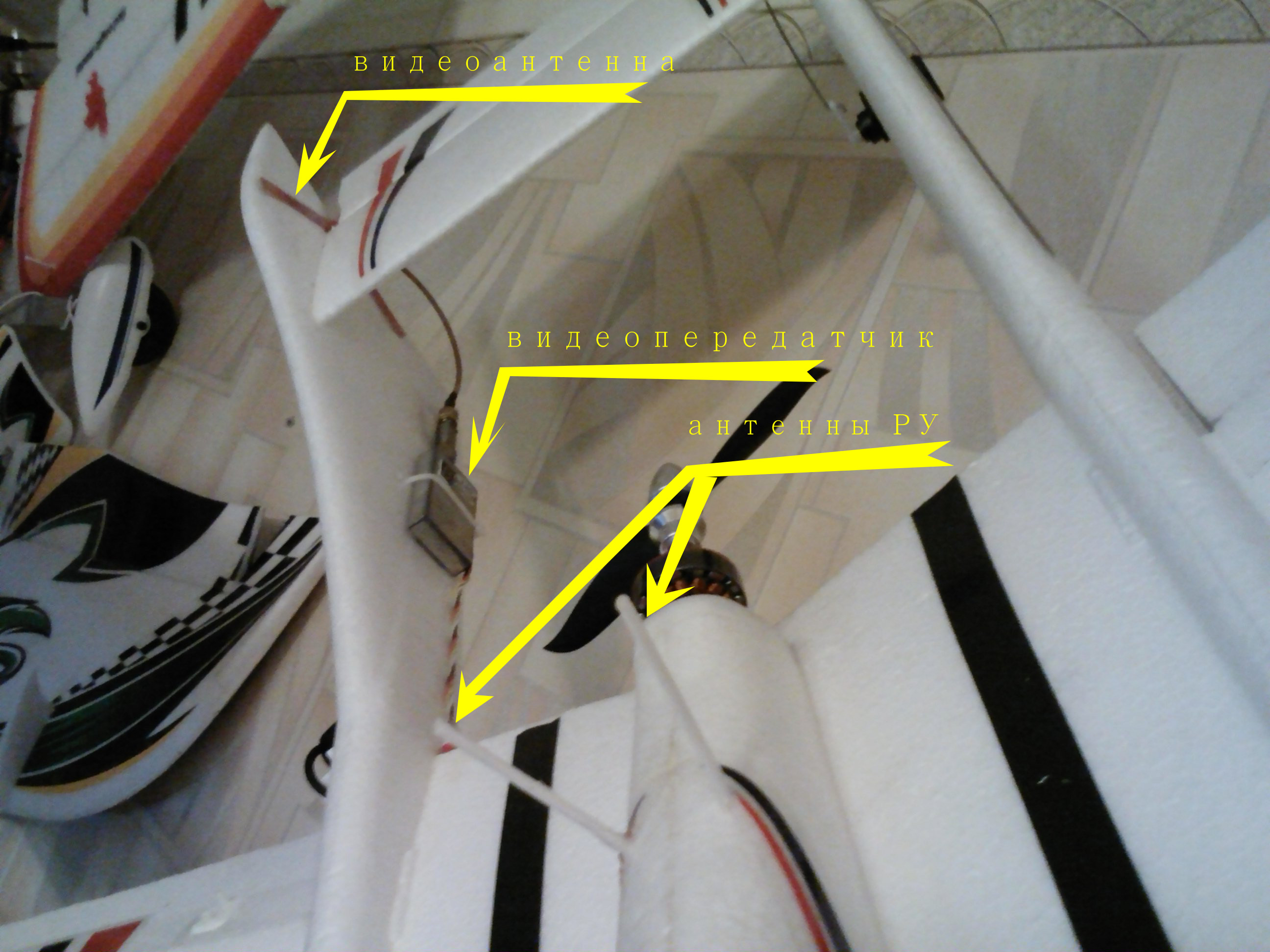
Фото компоновки:

Для установки камеры с пантилтом в "фонаре" вырезал паз под поворотную серву, закрепил изнутри теромклеем.
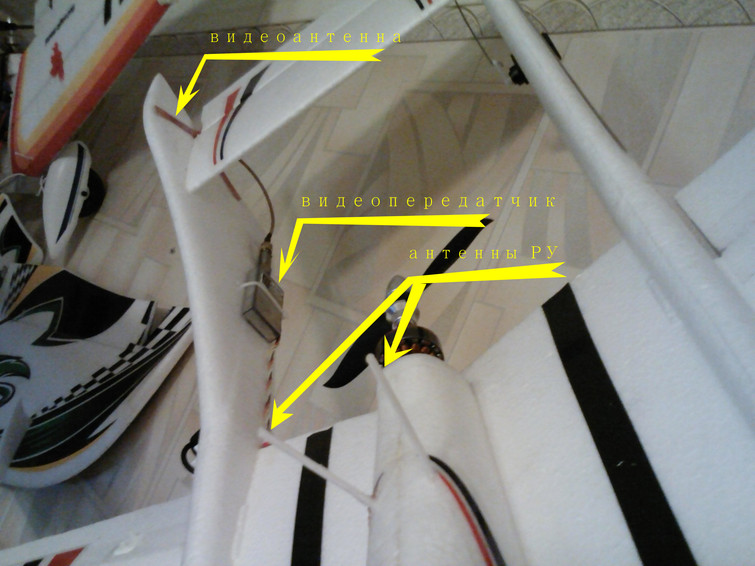
Приемник РУ находится внутри фюзеляжа, практически под антеннами, правда-правда, он там есть! =) Разбирать и фоткать не хочется =)

Автопилот упакован в пороллон для гашения вибраций. Фюзеляж немного "расхомячило" в итоге, но в принципе терпимо, на летных характеристиках не сказывается =) Питание для камеры +5В берется с вывода +5V автопилота (есть там такой, можно использовать для не сильно мощной нагрузки) иначе пришлось бы ставить отдельный понижающий DC-DC конвертер. Видео батарея прячется внутрь фюзеляжа в сторону хвоста.
Микрофон упрятан в носовую часть фюзеляжа перед автопилотом, места там навалом, но против центровки не попрешь и использовать его с пользой нет возможности.
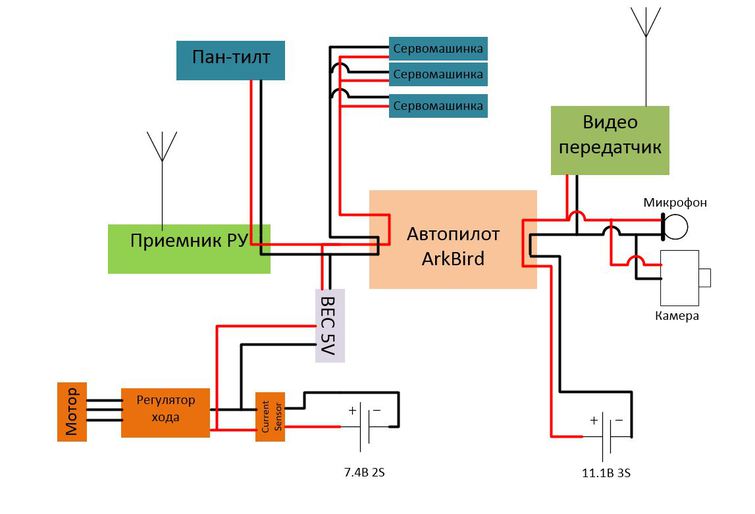
Про питание:
Борт запитан от встроенного в регулятор BEC +5В 2А. Не очень хорошо в плане надежности, но пришлось идти на компромисс ввиду серьезных ограничений по весу и внутреннему пространству фюзеляжа.
Видео тракт запитан от отдельной батареи (см. выше). В первую очередь для того, чтобы простейшим образом избавиться от помех по видео тракту от регулятора скорости. Разницу можно будет оценить по видео роликам приведенным ниже. Видео батареи хватает на 25 минут работы, что, учитывая полетное время 10-12 минут - с запасом. Я придерживаюсь принципа запитывания видео части от независимого источника питания, в том числе для страховки от отключения видео при просадке одной единственной ходовой батареи.
Схему питания борта рисовать не вижу смысла, ввиду ее тривиальности и отсутствия нестандартных решений. Она аналогична схеме приведенной в предыдущей статье, за исключением того, что BEC +5V находится в корпусе регулятора хода. Будет скоро статья про самолет, где во главу всего была поставлена отказоустойчивость, вот там и оторвусь на эту тему по полной программе =)
Резюме.
Самолетом доволен как слон, а может и два слона вместе взятых =) Что хотел, то получил. Платформа не сильно под FPV заточена, но летает хорошо и красиво.
Чтобы не быть голословным, парочка видео с курсовой камеры (прошу учесть, что в оригинале видео гораздо приятней выглядит, тытруба его все же поганит сильно):
Спокойный полет на небольшую дистанцию, в данном ролике видео тракт запитан от ходовой батареи, обратите внимание на помехи =)
Полет с простейшим высшим пилотажем от первого лица, выходом на максимальную скорость и полетом на малой высоте, видео тракт запитан от отдельной батареи, почувствуйте разницу =)
Спасибо за внимание! Всем мягких посадок и летной погоды!
Продолжение следует.
Осваивать "Кошку" в полете от первого лица начал еще в прошлом году летом (крепкий все же пепелац оказался ;)), первые полеты не записывал ввиду отсутствия рекордера, но продолжаю летать на ней до сих пор, что как бэ намекаэ, что пилот не совсем криворукий, жива все же =), адреналина с избытком, в конце статьи видео полетов этим летом =) На самом деле основные проблемы возникли следующие: запуск с рук, который требовал квалифицированного "ракету носителя" ввиду достаточно большой взлетной скорости, ибо самому и кидать, и успеть подхватить было той еще эквилибристикой; второй момент - грамотная настройка автопилота, чтобы он адекватно рулил этим шустрым пепелацем в автоматических режимах, то бишь домой привел в случае чего, а не в землю воткнул. Но справился в итоге, по-поводу тонкостей настройки конкретного автопилота для этого самолета или похожих заинтересованным личностям могу рассказать отдельно по мере необходимости.
Критерии выбора:
Выбор носителя был обусловлен не столько прагматизмом, иначе был бы выбран какой-нить X-5, сколько эстетическими соображениями. Хотелось летать на "истребителе" =) И чтобы выглядел он соответственно. С другой стороны это должен быть не большой самолет, чтобы не вызывал проблем с транспортировкой и запуском с рук.
- размах крыльев: не более 1000мм не менее 700мм (иначе грузоподъемность не позволит напихать туда всю необходимую FPV начинку)
- крейсерская скорость не менее 60км/ч
- максимальная скорость не менее 100км/ч
- полетное время не меннее 10 минут в смешанном режиме (пилотаж, скоростной полет\спокойный полет на крейсерской скорости)
- материал - EPO, потому как жизнь у него будет тяжелая, клеить и клеить =)
Характеристики самолета:
- Размах крыла: 750мм
- Длина: 865мм
- Полетный вес: 475г (в штатной комплектации, на самом деле врут и весит он 550гр. с батареей), с FVP начинкой вес составил 800гр.
- Площадь крыла: 11.50дм2
- пропеллер 5х5
- полетное время около 10 минут
- запас хода около 10км
- крейсерская скорость 60-70км\ч
- максимальная скорость 110км\ч
Сервы, которые шли в комплекте сразу ушли в мусор, т.к. мерзли зимой и вообще были из трухи сделаны.
Но хватит о грустном!
Красавец, не правда-ли? =)

Про начинку:
- регулятор хода, шел в комплекте, 40А, 2А BEC, Phoenixtech некий, учитывая, что мотор в статике максимум кушает 15-16А - хватает выше крыши с запасом. Запас видимо был с рассчетом на то, что размещаться в штатном варианте должен был внутри фюзеляжа без обдува. В итоге, учитывая дефицит пространства, переехал на брюхо, вот так:

- мотор штатный, см. выше ссылку под фото пепелаца из магазина, но... когда я его покупал в комплекте пришел не тот мотор, что там нарисован, а вот такой
- сервы: руль высоты, элероны
- приемник РУ - 2.4GHz FrSky, модификация уже не продается к сожалению, модель не помню, выколупывать и смотреть - лень, не телеметрийный, 7 PWM каналов и 8 каналов по CPPM. Используется выход CPPM.
- ходовая батарея 1300mAh 3S 25C
- видео-батарея 180mAh 3S
- автопилот ArkBird, подключен по CPPM
- видео передатчик Bevrc 400mW 1.3GhZ
- видео антенна 1.3GHz Vee antenna
- курсовая камера Fatshark 600TVL High Resolution
Автопилот был выбран именно этот в том числе (кроме его многих достоинств) и потому, что позволяет установку повернутым на 90 градусов в продольной оси, иначе не поместился бы никак.
Остальная начинка более-менне стандартная для не больших самолетов. Согласитесь, вкорячивать на пепелац размахом 750мм антенну РУ 433MHz - мягко говоря проблематично, да и 2.4GHz с бустером на земле пробивает до 5км - минимум (зависит от антенны на передатчике и на пепелаце), чего учитывая запас хода данного индивидуума хватает с большим запасом.
Видео антенна, передатчик и диапазон 1,3GHz с линейной поляризацией опять же была выбрана исходя из минимальных габаритов. Можно было бы попробовать и 5.8GHz, но учитывая, что большинство моих пепелацев имеют передатчики 1,3GHz - просто не хотелось разводить зоопарк. Опять же не "клевер" ввиду габаритов. Но этот момент не навязываю.
Камера выбиралась в первую очередь по наименьшим габаритам и весу, качество картинки достаточно посредственное, в чем можно убедиться посмотрев видео ниже. Но в принципе летать можно, привык.
Фото компоновки:

Для установки камеры с пантилтом в "фонаре" вырезал паз под поворотную серву, закрепил изнутри теромклеем.
Приемник РУ находится внутри фюзеляжа, практически под антеннами, правда-правда, он там есть! =) Разбирать и фоткать не хочется =)

Автопилот упакован в пороллон для гашения вибраций. Фюзеляж немного "расхомячило" в итоге, но в принципе терпимо, на летных характеристиках не сказывается =) Питание для камеры +5В берется с вывода +5V автопилота (есть там такой, можно использовать для не сильно мощной нагрузки) иначе пришлось бы ставить отдельный понижающий DC-DC конвертер. Видео батарея прячется внутрь фюзеляжа в сторону хвоста.
Микрофон упрятан в носовую часть фюзеляжа перед автопилотом, места там навалом, но против центровки не попрешь и использовать его с пользой нет возможности.
Про питание:
Борт запитан от встроенного в регулятор BEC +5В 2А. Не очень хорошо в плане надежности, но пришлось идти на компромисс ввиду серьезных ограничений по весу и внутреннему пространству фюзеляжа.
Видео тракт запитан от отдельной батареи (см. выше). В первую очередь для того, чтобы простейшим образом избавиться от помех по видео тракту от регулятора скорости. Разницу можно будет оценить по видео роликам приведенным ниже. Видео батареи хватает на 25 минут работы, что, учитывая полетное время 10-12 минут - с запасом. Я придерживаюсь принципа запитывания видео части от независимого источника питания, в том числе для страховки от отключения видео при просадке одной единственной ходовой батареи.
Схему питания борта рисовать не вижу смысла, ввиду ее тривиальности и отсутствия нестандартных решений. Она аналогична схеме приведенной в предыдущей статье, за исключением того, что BEC +5V находится в корпусе регулятора хода. Будет скоро статья про самолет, где во главу всего была поставлена отказоустойчивость, вот там и оторвусь на эту тему по полной программе =)
Резюме.
Самолетом доволен как слон, а может и два слона вместе взятых =) Что хотел, то получил. Платформа не сильно под FPV заточена, но летает хорошо и красиво.
Чтобы не быть голословным, парочка видео с курсовой камеры (прошу учесть, что в оригинале видео гораздо приятней выглядит, тытруба его все же поганит сильно):
Спокойный полет на небольшую дистанцию, в данном ролике видео тракт запитан от ходовой батареи, обратите внимание на помехи =)
Полет с простейшим высшим пилотажем от первого лица, выходом на максимальную скорость и полетом на малой высоте, видео тракт запитан от отдельной батареи, почувствуйте разницу =)
Спасибо за внимание! Всем мягких посадок и летной погоды!
Продолжение следует.
З.Ы. Если у кого-то возникли вопросы по существу - задавайте, не стесняйтесь, всем постараюсь ответить.
==================================================================
Мои предыдущие статьи:
FPV. От начинающего начинающим. Часть 1. Близко и низко.
Отдельностоящий (выносной ретранслятор) модуль РУ для FPV.
Увеличиваем максимальный угол отклонения стандартной сервомашинки.
Внедрение джойстика от PS2 в аппаратуру Turnigy 9X
Про выкладывание видео YouTube в ленту и т.п.













{kind=link}
При обеспечении прямой видимости и дальше можно летать, но иметь ввиду эту самую прямую видимость, т.е. учитывать рельеф местности, всякий там лес и т.д. и т.п. и набирать соответствующую высоту по ходу пьесы.
Т.е. как минимум если рядом лес или какие-то строения, то выяснить их высоту и посчитать необходимую высоту аппарата на удалении, которого надо достигнуть, для обеспечения прямой видимости.
Я просто подумывал с начало поставить на неё попробовать, но видно не стоит.
Пока специально не планирую покупать носитель отдельно для FPV, попробую
поставить на Calmato A40 электричка. Вообще думал поставить FPV на бензиновую Цессну
размах 2,05 м. Но читая разные статьи, так никто не делает. Наверное, это связано с рядом
сложностей, таких как отказоустойчивость, скорость полёта и т.п.
Буду перечитывать и разбираться дальше.
Что касается бензинового пепелаца, самая главная его проблема - вибрации. Не каждый автопилот нормально работать сможет.
Я присматриваюсь к Arkbird 2.0 UBX-M8 GPS с датчиком по току и датчиком истинной воздушной скорости. Но на нём написано, что он работает с системой FHSS, это система FUTABA-ы. У меня JR 9 канальный. Там в комплекте есть антивибрационная площадка.
Если есть опыт использования, поделитесь.
Насчет протокола, думаю он с любой аппаратурой работать будет, не только с футабой.
Очень информативные у Вас статьи. Благодарю.
Сам только начинаю закупать всё для FPV.
Увидел у Вас на фото "свою" любовь - Catalina.
Вы не пробовали на неё поставить FPV?
Или пробовали.
Интересно Ваше мнение на этот счёт.
Просто вы написали "почувствуйте разницу"..... Разница безусловно есть (мне кажется - стоят разные камеры). Но я не вижу конкретно эту помеху.
На первом видео, если присмотреться есть горизонтальные бегущие полосы. Тытруба замылил их конечно знатно, в оригинале они видны очень хорошо.
На втором видео эти полосы отсутствуют.
Нет, на моих (уже двух - самолет и коптер) бортах такого нету, хотя я питаю всё от одного акка. Просто я никогда не использую ВЕС регуля, а ставлю отдельные DC-DC преобразователи. Если мне надо только 5 вольт - то один (при большой нагрузке два - квадрокоптер), если ещё нужно 12 вольт (камера, подсветка квадра) - добавляю ещё один конвертер. В итоге могу втыкать любые акки от 2S до 6S (регули высоковольтные), фактически использую 3-4 ячейки.
Только вот как летчик мы пока не очень (((( Было несколько попыток ФПВ полетов, результат один - краш. Такое ощущение, что я всегда задираю слишком высоко камеру. Сколько градусов от горизонта (примерно конечно) у вас наклон камеры вниз?
Да, DC-DC конвертеры неплохо фильтруют, помехи появляются, если питать видео тракт напрямую от ходовой батареи. Но в данном случае во-первых дефицит места\полезной нагрузки, во-вторых учитывая, что ходовая батарея 3S ставить понижающий не имеет смысла, теряешь 1,5В как минимум, а повышающий до 12В тем более, будет работать в нештатном режиме. Комбайнов понижающе-повышающих маленьких как-то не нашел, все больше они достаточно громоздкие.
Вы какие DC-DC используете, если не секрет? =)
Простые, степ-даун конвертеры, беру в обычном радиомагазине, подбираю по току нагрузки. Внешне они выглядят как эти. Как справедливо заметили, для получения 12 вольт на акке 3S, конвертер использовать не имеет смысла - так я и летаю в основном на 4S. Трехячейки - это уже акки-инвалиды, пережившие ампутацию одной умершей банки )))) - просто доживают свой ресурс.
Потихоньку начинаю задумываться о 5 и 6 ячеистых акках.
Недавно взял степАп конвертер (габариты поболе степДауна), хочу когда-нибудь слепить мелкоквадрик на акках 2S. (возможно это будет путём для дальнейшей конверсии акков). Мелкоквадрик хочу для полетов близко/низко/по кустам/по лесу.
Комбайны конечно большие, но они меньше акка. Хотя нужна ли такая универсализация - вопрос очень спорный. Что-то я не загорелся такого монстра ставить для достижения полной всеядности борта.
360мАч при передатчике 400mW хватает на 50 минут гарантированно, тестировал специально, соответственное 180мАч должно хватать на 25 минут точно.
Но когда дело дошло до реальной сборки ФПВ системы, я подумал что буду забывать подзарядить отдельный акк, и не стал его мастырить на борт. За совет спасибо, взял на заметку - буду смотреть и думать. Когда будут нормальные полеты ФПВ (а не это простигосподи) - может я и прийду к тому чтобы питать видео отдельно. Посмотрим.
Я вот ещё о чем думаю. У меня почти на всех ЛА стоят полетные контроллеры АРМ и вариации на тему. Уж если эти помехи будут настолько велики что я не смогу глядеть (мозг человека - ОЧЕНЬ МОЩНЫЙ фильтр помех), уж тогда по питанию контроллеру точно будет плохо. Так как на коптерах у меня более/менее получается (лучше чем на самолете) - может мне и не нужен отдельный акк.
А вот аналоговые, видео передатчик, камера и т.п. сразу выдают видимый невооруженным глазом "результат" в случае наводок на питание. В процессе полета мозг конечно их отфильтровывает и они не мешают практически, но на записи смотрится не красиво =)