Мультикоптеры нынче тема модная, вот и я решил поделиться своей конструкцией. Перед тем как заказать комплектующие долго и упорно перечитывал форумы, спрашивал советы у людей, и в итоге родилась вот такая комплектация:


Контроллер – AIOP V2;
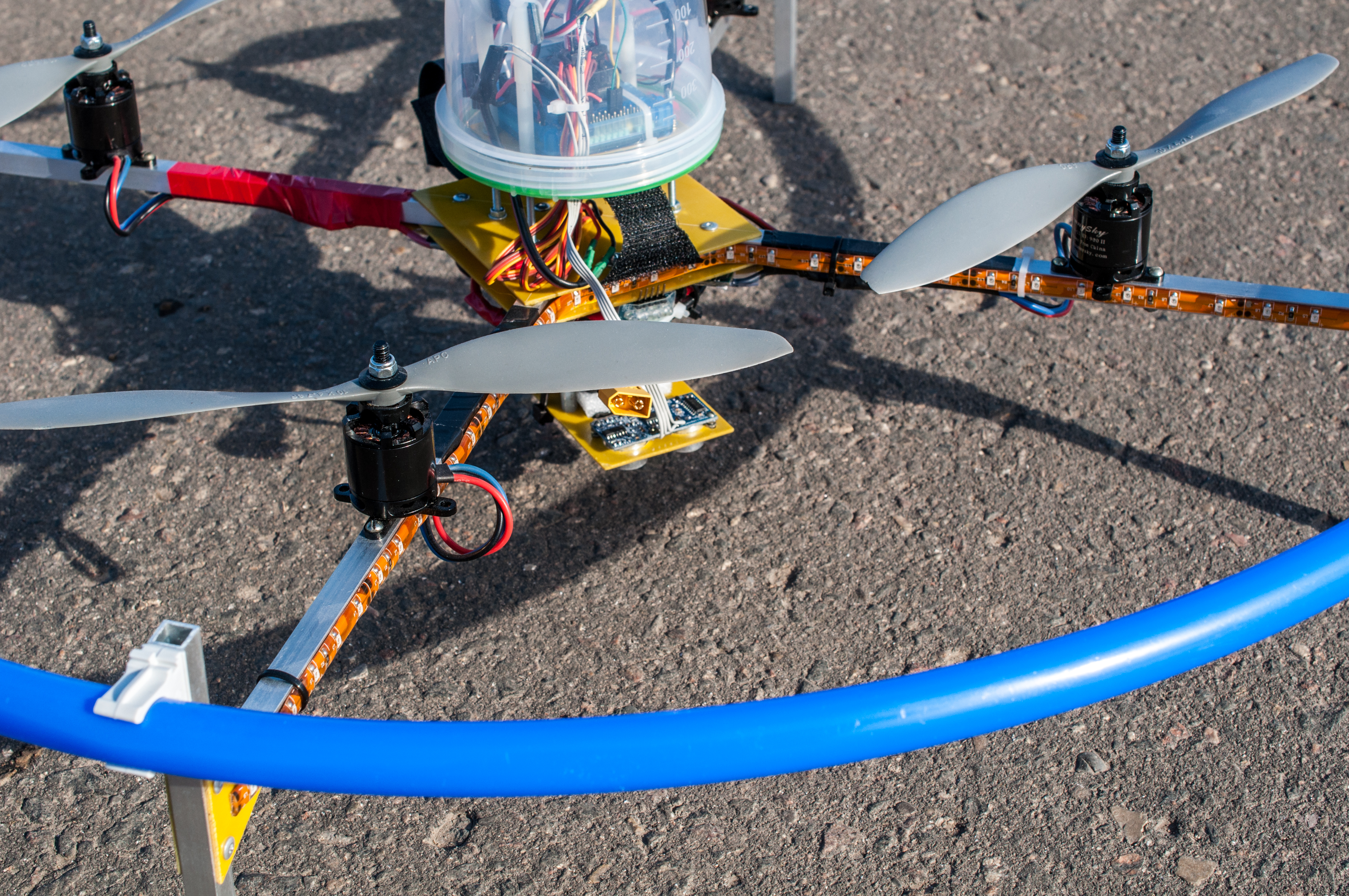
Двигатели – Sunnysky V2216-11 900KV Outrunner Brushless Motor For RC Model;
Регуляторы – Afro ESC 20Amp Multi-rotor Motor Speed Controller (SimonK Firmware) Регулятор для многороторных систем Afro 20A, с прошивкой SimonK
Винты – APC 10x4.7;
Аккумулятор – Rhino 2250mAh 3S1P 30C Lipoly Pack Аккумулятор Rhino 2250mAh 3S1P 30C Lipoly Pack
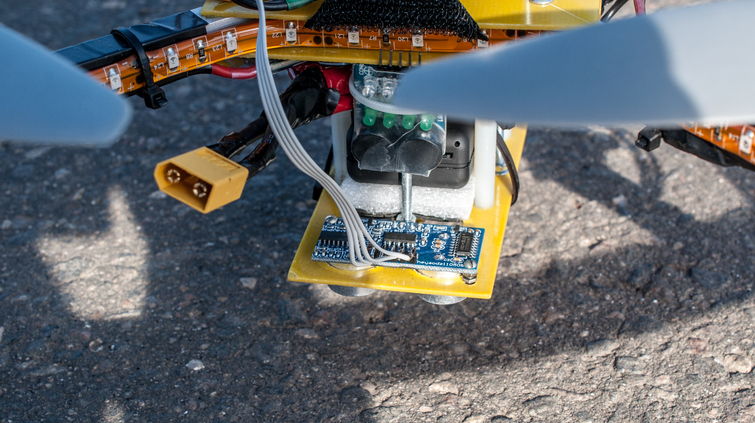
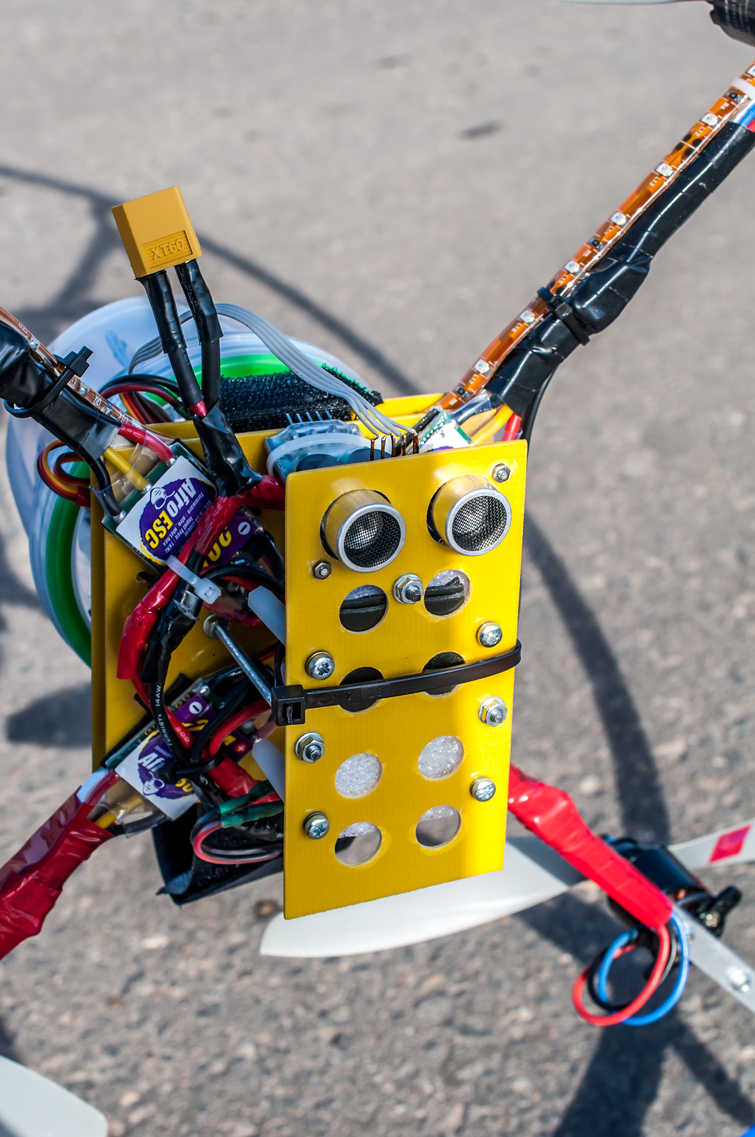
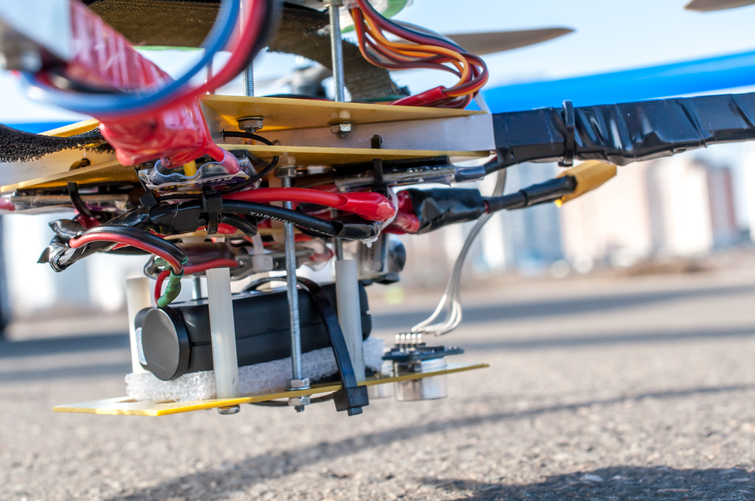
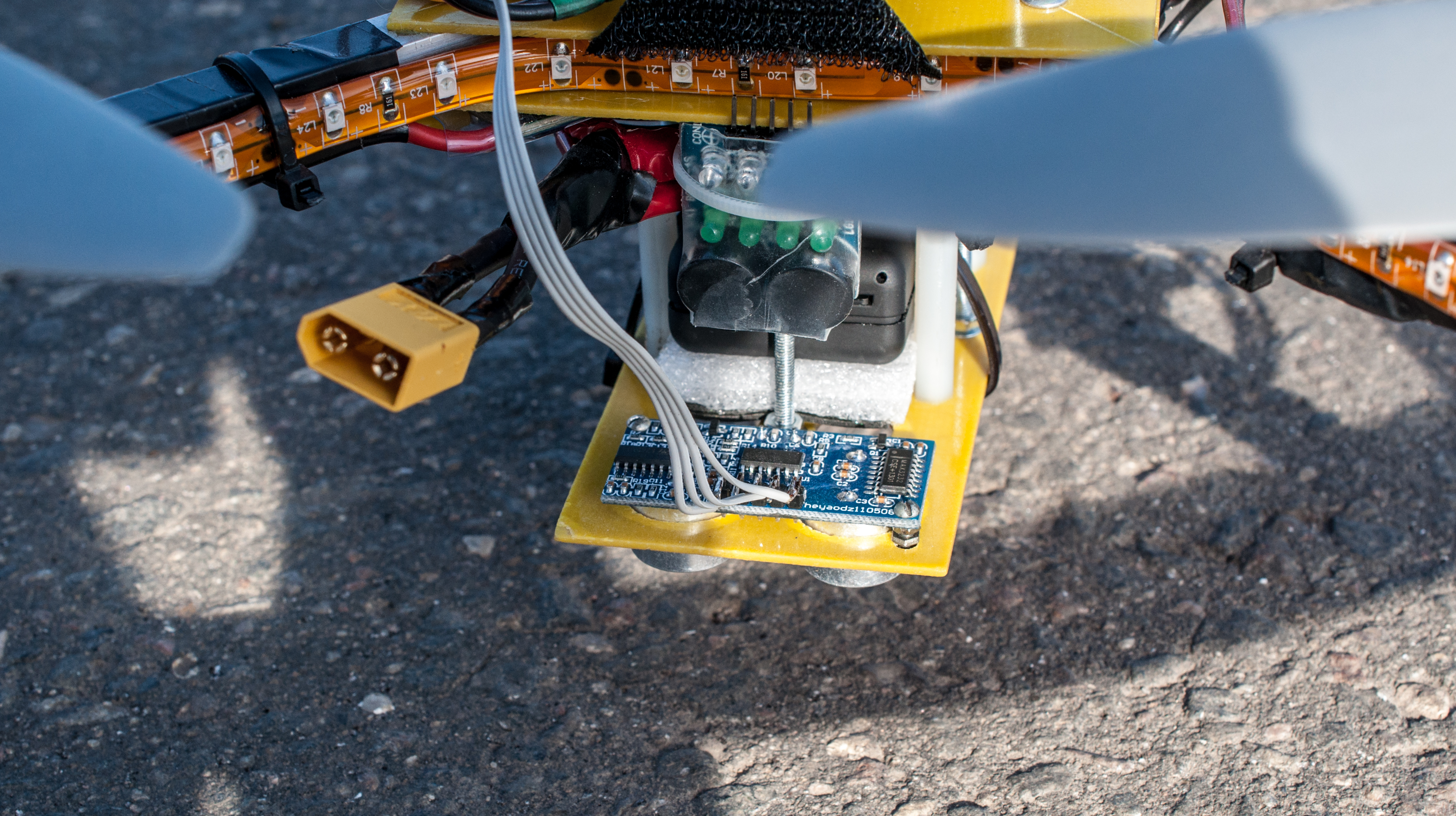
Сонар – HC-06.
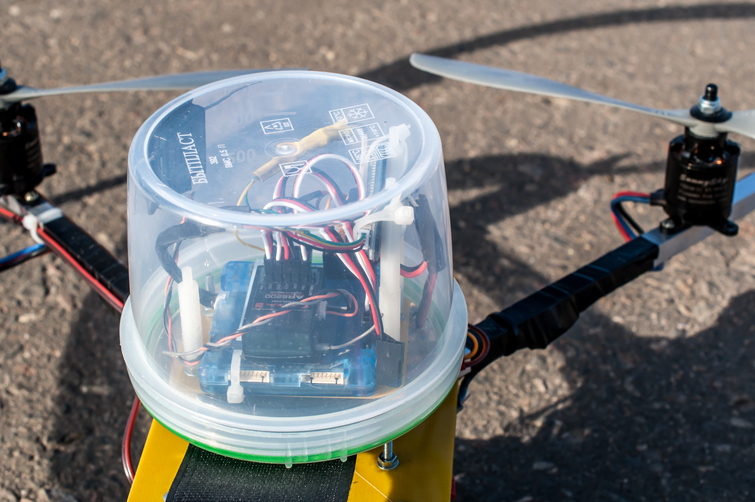
Так же для удобства поставил еще Multiwii MWC FC Bluetooth Module Multiwii MWC FC Bluetooth Module для беспроводной связи устройств (совместимый с Android) , теперь с помощью софта на телефоне можно быстро настраивать ПИДы в поле. Установил светодиодную ленту для подсветки ориентации квадрокоптрера High Density Waterproof LED Flexible Strip High Density Waterproof LED Flexible Strip - Green (1mtr) и пищалку для поиска в траве "Пищалка" для поисков модели в траве от Hobby King .Еще было заказана некоторая мелочевка, это разъемы XT60, силиконовые провода, нейлоновые стойки и защитный корпус для мозгов Hard Case for MultiWii and MegaPirate AIO Flight Controller.
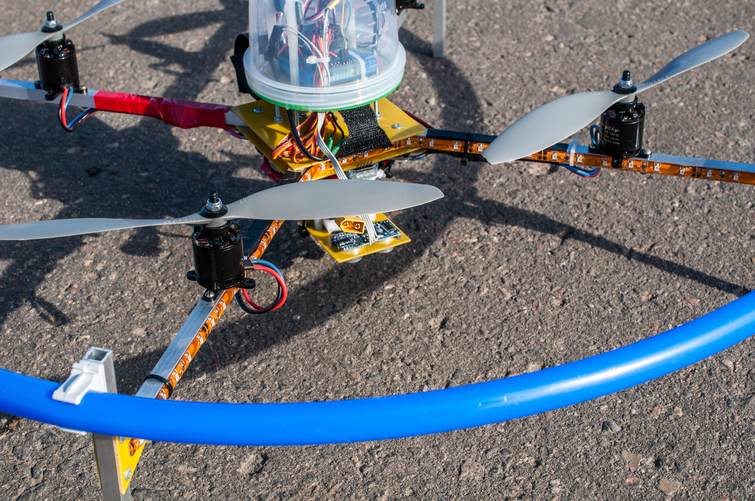
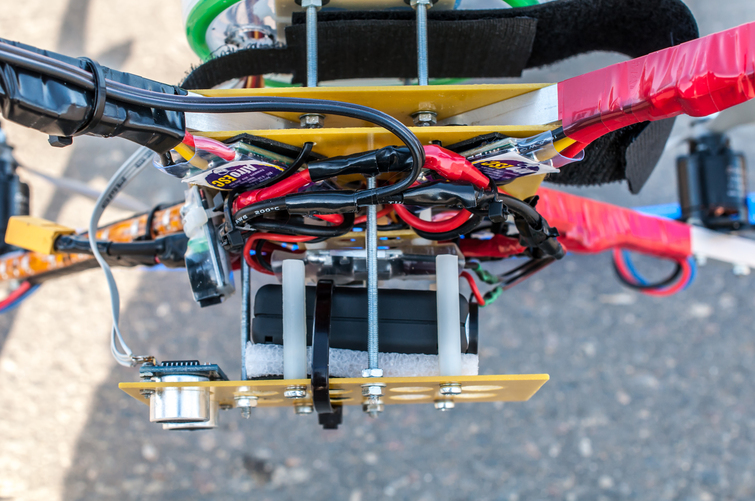
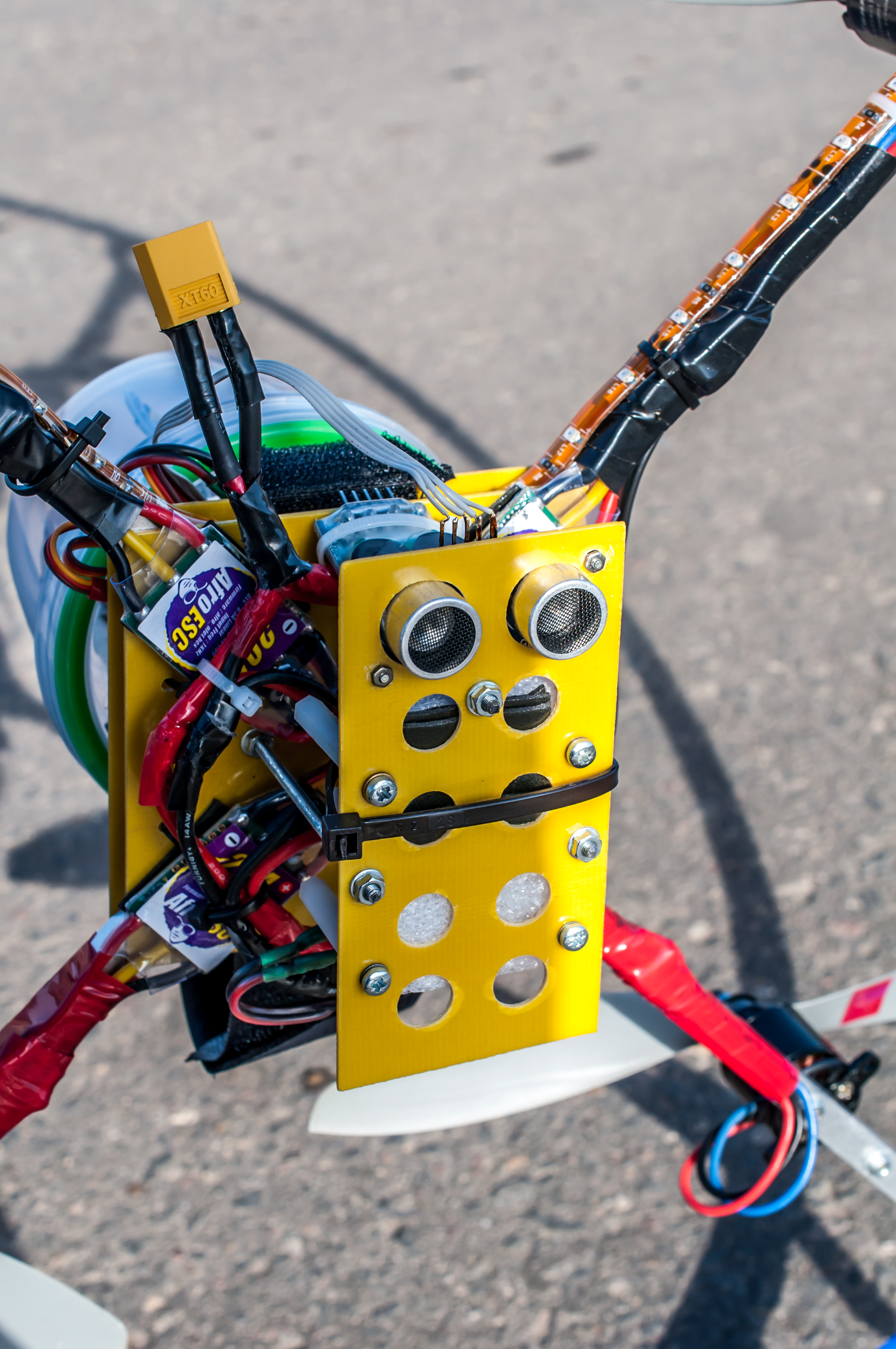
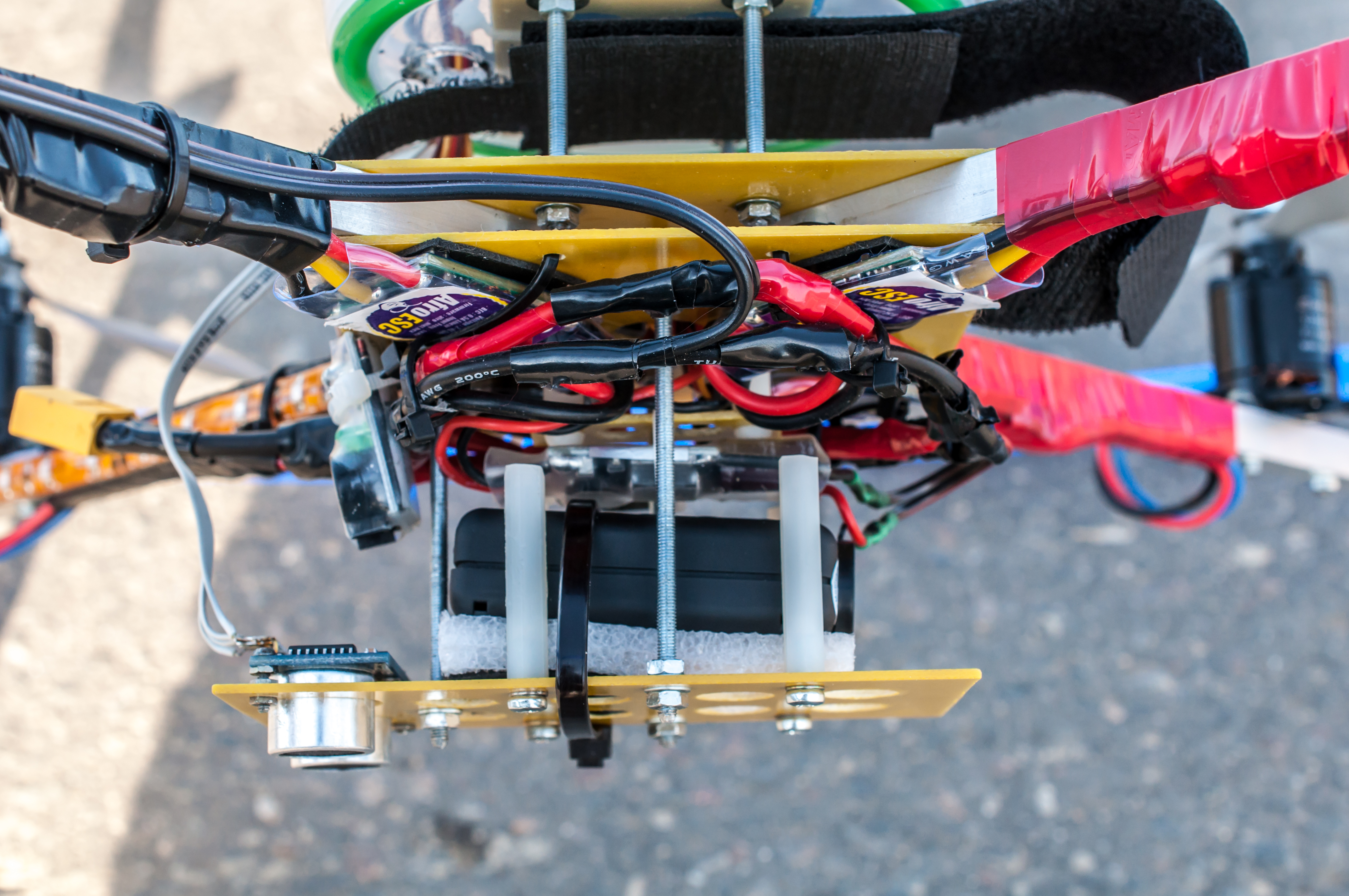
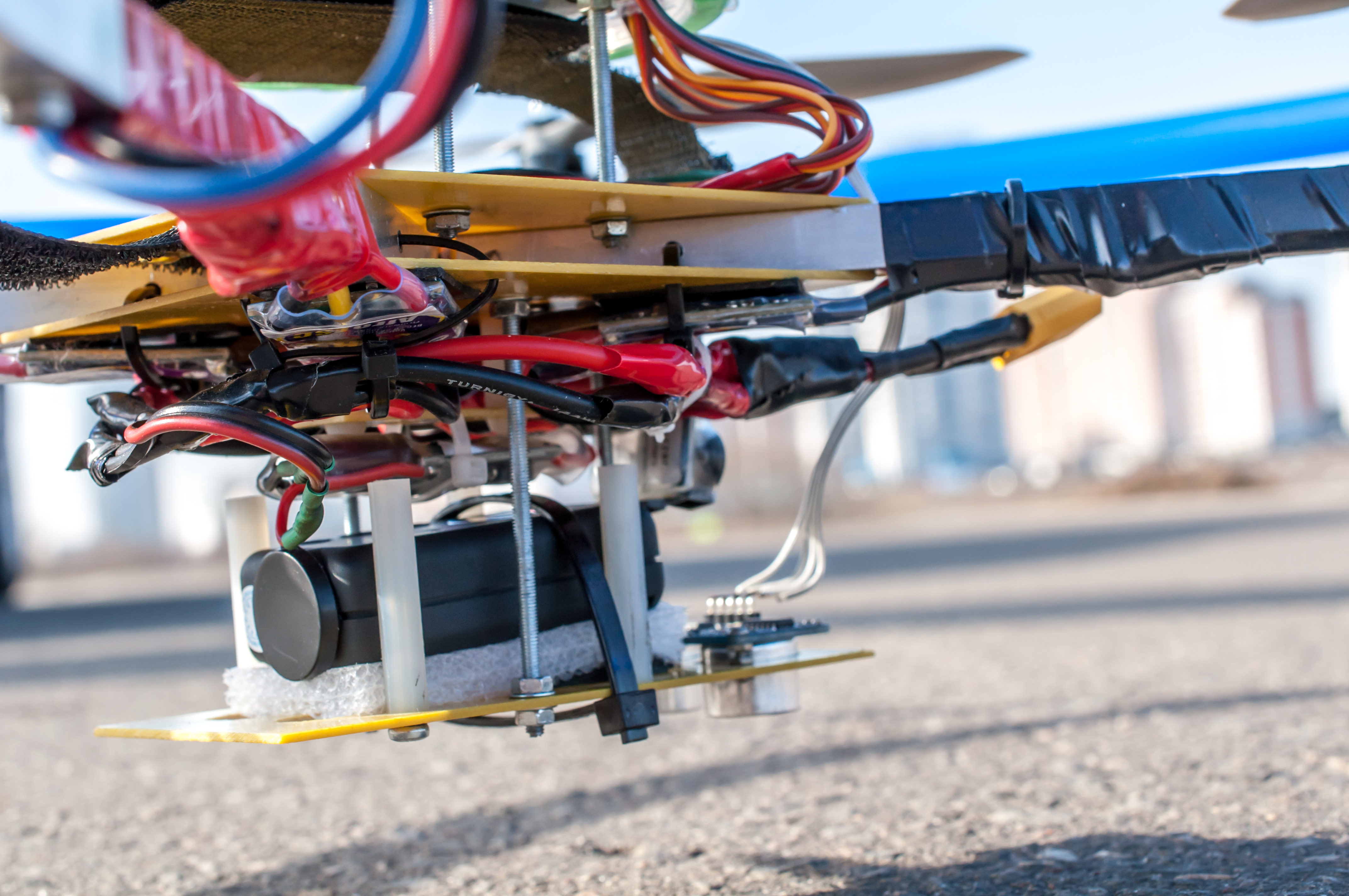
Схема квадрокоптера классическая «X» рама с алюминиевыми лучами квадратного профиля 10х10х1 мм. Две основные площадки размером 100х100х1.5 мм из стеклотекстолита + дополнительные площадки под крепление контроллера, периферии и сонара с камерой.
Лучи к площадкам закреплены с помощью алюминиевых заклепок, для крепления дополнительных площадок с основным использовались шпильки М3. Также с целью защиты винтов и окружающих был установлен гимнастический пластиковый обруч диаметром 740 мм, да он прибавляет в весе 120 грамм, но пока квадрик является учебно-тренировочным, эта штука незаменима.
В контроллер сначала была загружена базовая прошивка от MahoWii, в данный момент квадрик летает уже на платной прошивке MahoWii RC3.1. Что могу сказать, оно стоило того, чтобы за эту работу над прошивкой заплатить, я в восторге.
В данной конфигурации вес квадрокоптера примерно 1400 грамм, с аккумулятором 2250mAh 3S1P 30C время полета в среднем 8 минут, меня это вполне устраивает. В дальнейшем, конечно, уберется обруч, упроститься конструкция квадрика и он похудеет вследствие чего и возрастет полетное время.
В представленном видео видно как работает функция удержания высоты, да и вообще стабильность всей конструкции.
За все время тренировок был сломан только один винт и то из-за одного всего лишь падения. Никаких вибраций нет. Это я к чему, что не стоит экономить на винтах и двигателях, в дальнейшем будет меньше проблем.
Если кого заинтересует конструкция, я добавлю чуть позже фото, когда погода будет более-менее.
Будут вопросы – пишите, я хоть и сам начинающий, но кое-что познал из мира мультикоптеров.




Двигатели – Sunnysky V2216-11 900KV Outrunner Brushless Motor For RC Model;
Регуляторы – Afro ESC 20Amp Multi-rotor Motor Speed Controller (SimonK Firmware) Регулятор для многороторных систем Afro 20A, с прошивкой SimonK
Винты – APC 10x4.7;
Аккумулятор – Rhino 2250mAh 3S1P 30C Lipoly Pack Аккумулятор Rhino 2250mAh 3S1P 30C Lipoly Pack
Сонар – HC-06.
Так же для удобства поставил еще Multiwii MWC FC Bluetooth Module Multiwii MWC FC Bluetooth Module для беспроводной связи устройств (совместимый с Android) , теперь с помощью софта на телефоне можно быстро настраивать ПИДы в поле. Установил светодиодную ленту для подсветки ориентации квадрокоптрера High Density Waterproof LED Flexible Strip High Density Waterproof LED Flexible Strip - Green (1mtr) и пищалку для поиска в траве "Пищалка" для поисков модели в траве от Hobby King .Еще было заказана некоторая мелочевка, это разъемы XT60, силиконовые провода, нейлоновые стойки и защитный корпус для мозгов Hard Case for MultiWii and MegaPirate AIO Flight Controller.
Схема квадрокоптера классическая «X» рама с алюминиевыми лучами квадратного профиля 10х10х1 мм. Две основные площадки размером 100х100х1.5 мм из стеклотекстолита + дополнительные площадки под крепление контроллера, периферии и сонара с камерой.
Лучи к площадкам закреплены с помощью алюминиевых заклепок, для крепления дополнительных площадок с основным использовались шпильки М3. Также с целью защиты винтов и окружающих был установлен гимнастический пластиковый обруч диаметром 740 мм, да он прибавляет в весе 120 грамм, но пока квадрик является учебно-тренировочным, эта штука незаменима.
В контроллер сначала была загружена базовая прошивка от MahoWii, в данный момент квадрик летает уже на платной прошивке MahoWii RC3.1. Что могу сказать, оно стоило того, чтобы за эту работу над прошивкой заплатить, я в восторге.
В данной конфигурации вес квадрокоптера примерно 1400 грамм, с аккумулятором 2250mAh 3S1P 30C время полета в среднем 8 минут, меня это вполне устраивает. В дальнейшем, конечно, уберется обруч, упроститься конструкция квадрика и он похудеет вследствие чего и возрастет полетное время.
В представленном видео видно как работает функция удержания высоты, да и вообще стабильность всей конструкции.
За все время тренировок был сломан только один винт и то из-за одного всего лишь падения. Никаких вибраций нет. Это я к чему, что не стоит экономить на винтах и двигателях, в дальнейшем будет меньше проблем.
Если кого заинтересует конструкция, я добавлю чуть позже фото, когда погода будет более-менее.
Будут вопросы – пишите, я хоть и сам начинающий, но кое-что познал из мира мультикоптеров.


















Михаил, если не сложно - опишите, как подключили Bluetooth (в какой разъем на плате и что за программка для настройки)
на андройд есть две программки MultiWii Configurator и MultiWii EZ-GUI, последняя мне больше нравится
http://www.parkflyer.ru/78465/blogs/view_entry/2608/
Ни в коем случае не ругаю маховий (мне не нужны холивары))). Просто попробуйте.
Краш - не старшен. Если есть что восстанавливать - один-два дня, и ты снова на борту, а вот если улетел весь.....
Мегапират нужен не только для полетов по точкам, поверьте мне. Просто попробуйте.
Если спереть на технику / стечение обстоятельств, то:
1. Коптер был на отдалении. Решил поснимать панораму берега. Отлетел подальше, развернулся. Полетел боком, мордой к себе (управление "инвертированно" в данный момент). Подул резкий ветер, коптер унесло за дерево. Глядя сквозь ветки (я его вижу), включил режим полета симпл, чтобы подтянуть его к себе. Это режим, когда без разницы каким боком к тебе коптер, тянешь его к себе (элеватор вниз), он летит к тебе хоть боком хоть задом хоть передом. Хорошо на бумаге, НО на коптере очевидно из-за от наводок силовых проводов на компас (GPS датчика не было) - сбились стороны света. При наличии GPS - это режим работает без ошибок. И коптер полетел не ко мне а от меня и в сторону. Переключился в ручной режим, пытался вырулить.... В общем я его потерял из вида. Поиски по подозреваемой территории ничего не дали.
2. Необлетанный толком коптер (другой, 4-5тый вылет) летал недалеко от меня, снимал со стороны лыжные соревнования (не кричать, ТБ соблюдалась - в радиусе 50-100 метров не было никого). Решил подняться повыше - словил верховой ветер. Сначала не делал ничего, так как считал ситуацию подконтрольной ))))) Думаю - "о, классная панорама выйдет". Потом что-то далековато его уже отнесло. Надо было выруливать БЕЗ ПЕРЕОРИЕНТАЦИИ, как есть. Короче зарулился - пока пытался понять где у коптера зад где перед (светодиодов тоже ещё не было на коптере, как и GPS) - его отнесло в частный сектор. Поскольку я понял, что не могу его притащить к себе (так как вдали не вижу ориентации по отношению ко мне) - принял решение сажать аккуратно. Газ сделал процентов 30, и он где-то сел. Он у меня был ЖУТКО недогруженным, висел на 40 процентах - планировался под долгое ФПВ, финальная загрузка была бы ещё 1 килограмм плюсом. С передающим модулем FRSky бегал три часа - пытался по фейлсейвам вычислить азимуты на место посадки (по команде коптер не взлетал, видать посадка была не совсем успешной). Замерз (-25 было) - бросил поиски.
Резюме: в обоих случаях -
1. Надо было ронять коптер, как только что-то пошло неправильно. Самоуверенность, попытки вернуть - привели к ещё большему отдалению.
2. Наличие настроенной GPS на борту позволило бы вернуть коптер легким движением пальца, щёлкнув тумблером.
3. Наличие поискового маяка на борту существенно облегчило бы поиски.
В состоянии аффекта по утрате второго коптера была куплена поисковая система Пеленг от Слона. По опыту эксплуатации, могу сказать - что смог бы найти оба коптера, имея маяк на борту. Хоть реальная дальность (с поправкой на кривизну местности и заборы) - невысока, но с маяком поиски СУЩЕСТВЕННО проще. У меня был случай, когда я ползал по полю по пояс в снегу, С МАЯКОМ не мог найти самолет, и проходил в двух метрах от него. Самолет как тот вальдшнеп (или куропатка - кто там в снег прячется из птиц) закопался горизонтально в снег, да ещё около низкой сосенки. Площадку 10х10 метров исползал вдоль и поперек. Без маяка не нашел бы. Да, это своего рода реклама Пеленга (но ему бы дальности поболе чутка - буду думать над антенной для поискового устройства) - но это реклама от пользователя.
Простите за МНОГАБУКАФ
спасибо за поучительный рассказ
Жаба меня давила ДОЛГО. Один коптер 7500, второй коптер 9500. Это сумма по закупочным ценам комплектующих, без учета поюзанных акков.
Получается на одной чаше весов - весь коптер за 9,5 тысяч, на другой чаше весов - датчик GPS за 30 баксов.
Купил систему Пеленг за 4,5 - всяко дешевле, чем борта терять.
если у вас плата питается от регуляторов, то да и питаие можно взять с портов платы
хотя читал где-то, что лучше не загружать плату нагрузкой разной периферией
поправте ссылки пожалуйста, не открываются
увсё поправлено
ссылка да косяк, подправлю