Всем привет!
Друзья, очень нужна помощь, подсказки по данному девайсу.

Друзья, очень нужна помощь, подсказки по данному девайсу.

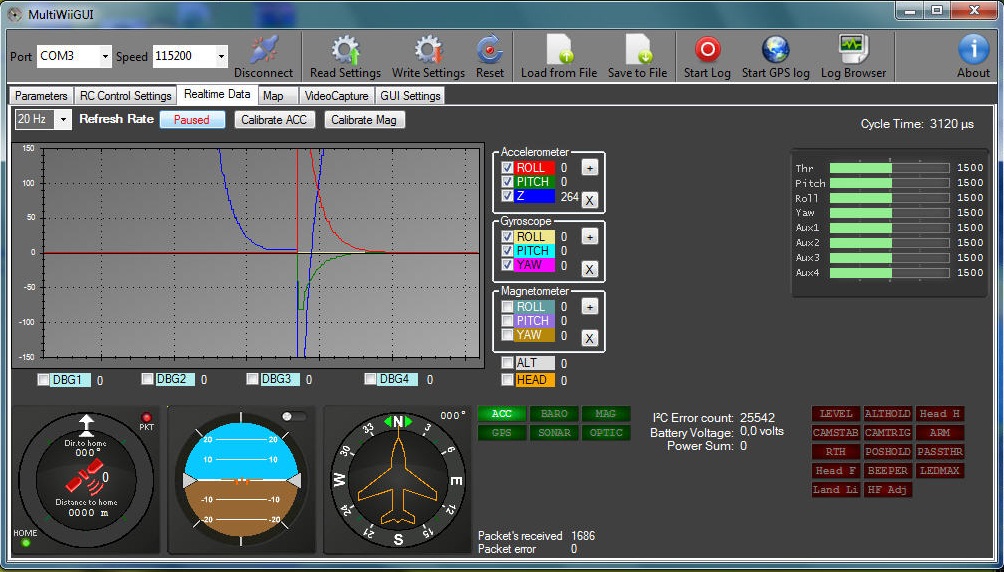
Данный контроллер был приобретён очень давно и валялся в коробке более двух лет(может больше). С электроникой и программированием не дружу совсем, так что прошу отнестись с пониманием. Читал сайты и форумы по настройке, прошивка вроде заливается в плату, но в программе WinGUI при наклоне платы графики стоят на месте. Может просто плата не работает(не отрицаю что руки кривые), а я пробую и пробую.
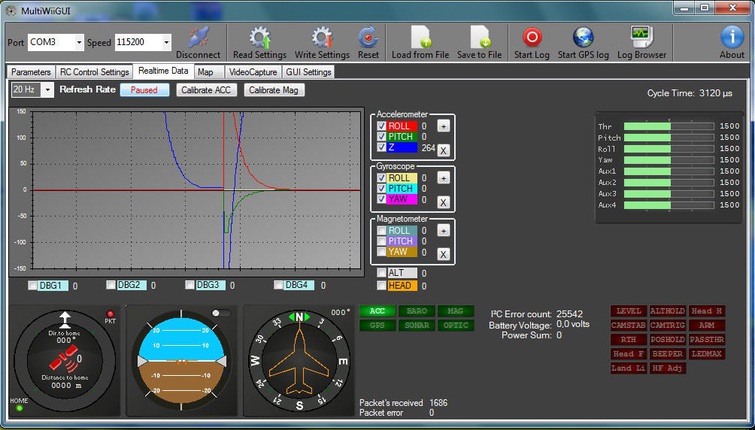
При калибровке график меняется, больше сколяюсь кривым рукам и не понимаю , как всё делать правильно.
Плата нужна для работы с аналоговыми сервами (подобие стабилизации камеры) с акселерометрами, без гироскопов.
Спасибо, жду Ваших ответов.
При калибровке график меняется, больше сколяюсь кривым рукам и не понимаю , как всё делать правильно.
Плата нужна для работы с аналоговыми сервами (подобие стабилизации камеры) с акселерометрами, без гироскопов.
Спасибо, жду Ваших ответов.













#define CRIUS_LITE // Crius MultiWii Lite
#define SERVO_MIX_TILT
#define SERVO_TILT
Это же надо включать ?
#define GIMBAL
, но нужно под свою плату подгонять config.h (скачивать scetch)
Залил- ни чего , кроме линии смерти. Датчики не реагируют.
Задам дурацкий вопрос- плата должна работать только от шнура ЮСБ? Без доп настроек и т.д.
//#define MPU6050_LPF_256HZ
//#define MPU6050_LPF_188HZ
//#define MPU6050_LPF_98HZ
//#define MPU6050_LPF_42HZ
//#define MPU6050_LPF_20HZ
//#define MPU6050_LPF_10HZ
//#define MPU6050_LPF_5HZ
включите
#define ITG3200_LPF_20HZ
#define MPU6050_LPF_20HZ
Ничего.
Есть серва , переделанная на постоянное вращение, которая будет вращать башню танка, и серва для поднятия ствола. Плата будет всё это дело стабилизировать во время движения танка. Плата должна отключаться с пульта, так же меня интересует факт управления сервами во время стабилизациии. (но пока можно не отвлекаться на это).
Что то надо будет ещё настраивать в config.h или все настройки идут в ВинГуи ?
Спасибо.