Всем Привет !
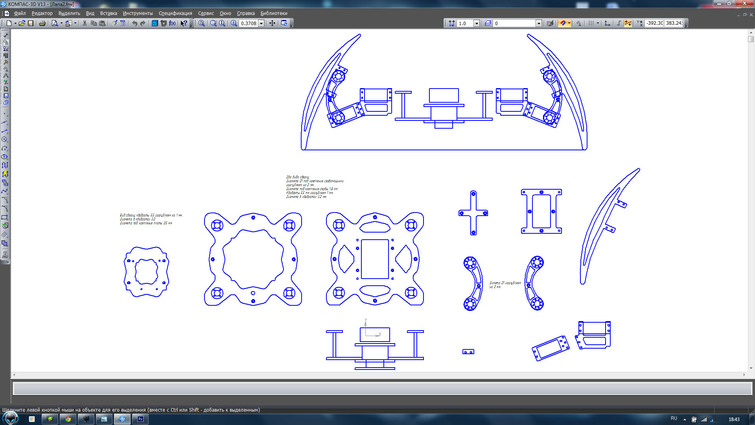
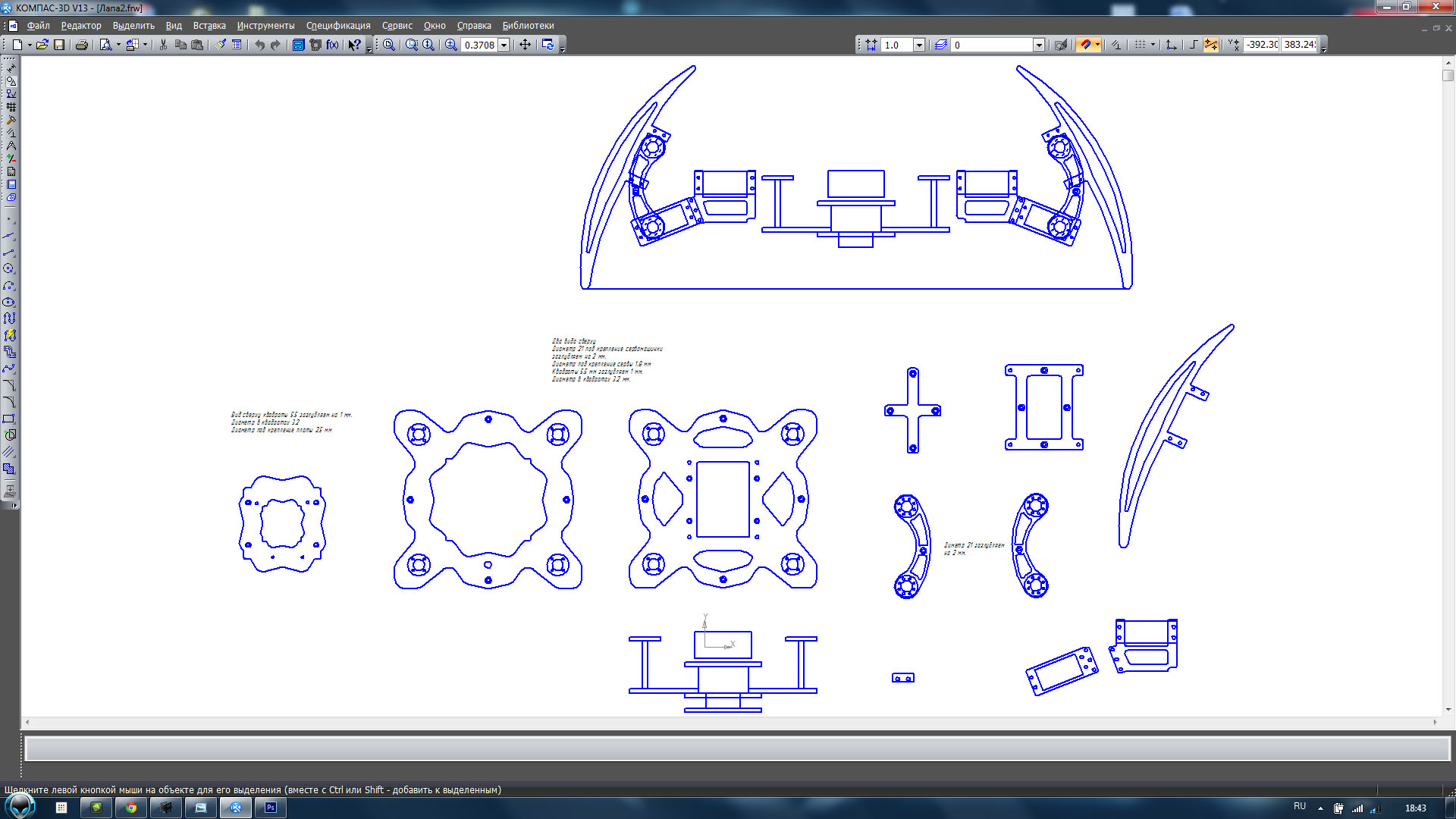
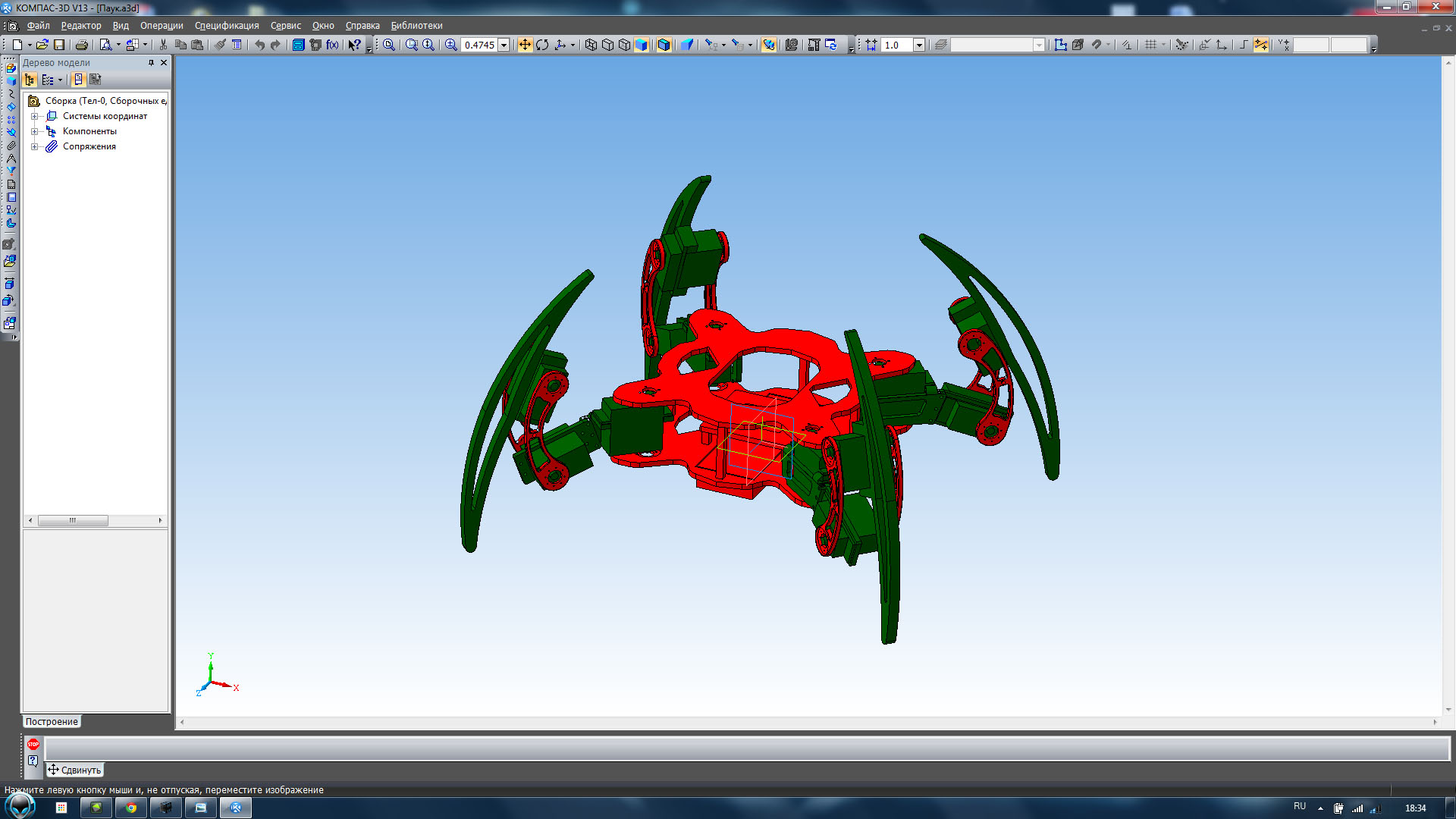
Год назад заинтересовался микроконтроллерами "arduino" и постройкой четырехногово робота-паука на Arduino Uno R3. Интерес возник после чтения различных статей, просмотра видео на портале youtube. Больше всего впечатлили роботы "PhantomX hexapod" и муравей "A-pod", которые переработал парень под ником Zenta (Коре Халворсен) . Первый его робот создан на сервомашинках "dynamixel AX-18" от компании "Robotis", а второй на сервомашинках "Hitec". Эти сервомашинки одни из дорогих. Создавать пробную модель, которую запланировал на базе этих машинок, мне будет не по силам. В качестве сервомашинок выбор пал на "Tunigy TGY-S9010" (13 кг.), заказал шилд dfrobot i/o expansio v 5.0, в дальнейшем будет установлен модуль bluetooth xbee, батарея 7,4v 5100mah, и SBEC на 20A сила тока при ходьбе будет скорее всего превышать 12А, поэтому заказал с запасом. После просмотра множества картинок и фото, я решил создать робота по своему дизайну. Сделал эскизы. Эти рисунки перенес в чертежи, делал в компасе, что то в солидворксе.
Год назад заинтересовался микроконтроллерами "arduino" и постройкой четырехногово робота-паука на Arduino Uno R3. Интерес возник после чтения различных статей, просмотра видео на портале youtube. Больше всего впечатлили роботы "PhantomX hexapod" и муравей "A-pod", которые переработал парень под ником Zenta (Коре Халворсен) . Первый его робот создан на сервомашинках "dynamixel AX-18" от компании "Robotis", а второй на сервомашинках "Hitec". Эти сервомашинки одни из дорогих. Создавать пробную модель, которую запланировал на базе этих машинок, мне будет не по силам. В качестве сервомашинок выбор пал на "Tunigy TGY-S9010" (13 кг.), заказал шилд dfrobot i/o expansio v 5.0, в дальнейшем будет установлен модуль bluetooth xbee, батарея 7,4v 5100mah, и SBEC на 20A сила тока при ходьбе будет скорее всего превышать 12А, поэтому заказал с запасом. После просмотра множества картинок и фото, я решил создать робота по своему дизайну. Сделал эскизы. Эти рисунки перенес в чертежи, делал в компасе, что то в солидворксе.
Чертежи -
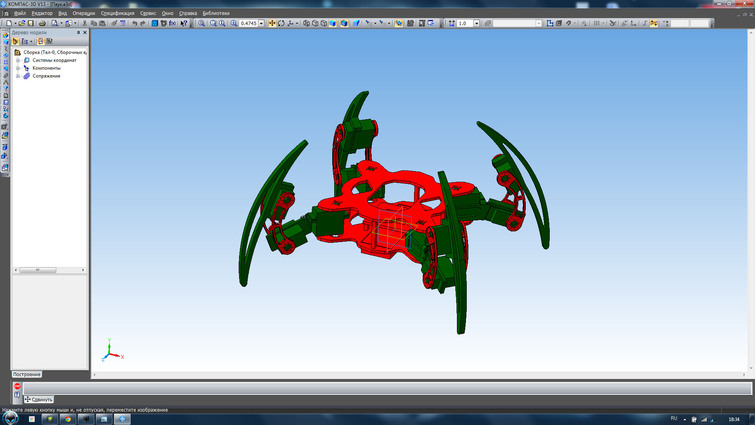
После выполнения чертежей создал примерную 3d модель. Анимация получилась корявая видео выкладывать не буду.
Все запчасти на робота заказывал на паркфлаере. Первая часть деталей пришла в течении 1,5 месяца, а последующие 2 посылки в общем пришли в течение 7-8 месяцев. Задержка в доставке была из-за сбоя в работе hobbyking и российской таможни. В углу слева на фото предварительная сборка робота.
Перечень деталей робота:

Пока ждал посылки из поднебесной, начал искать, где можно сделать лазерную резку. В качестве корпуса и соединения лапок выбрал оргстекло 4 мм, лапки акриловый лист 8 мм, так как площадь опоры будет больше. В фирме все детали обсчитали и озвучили огромную сумму. Нашел другую и заказал детали на фрезерном станке. После фрезеровки все детали обработал и отполировал в ручную.

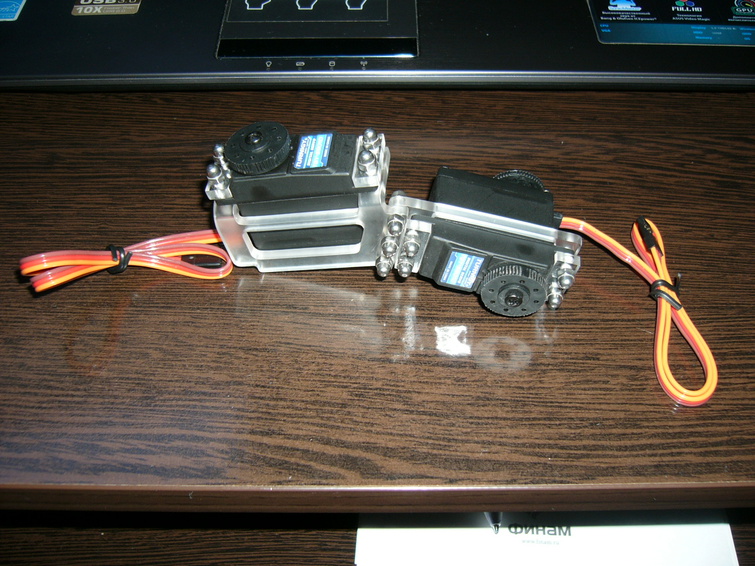
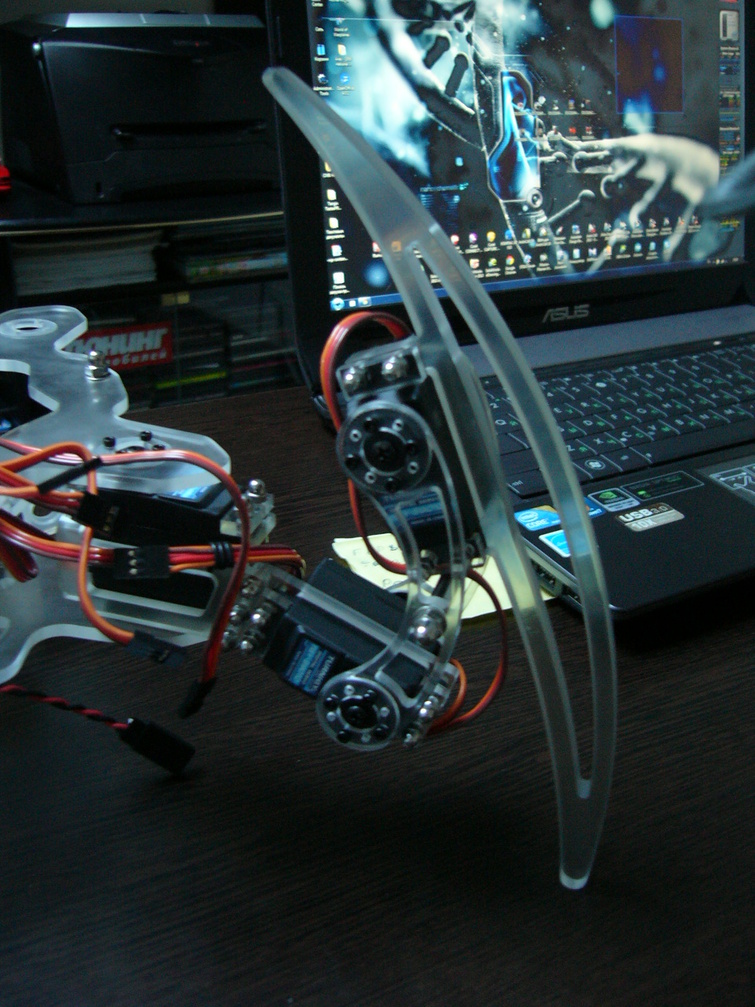
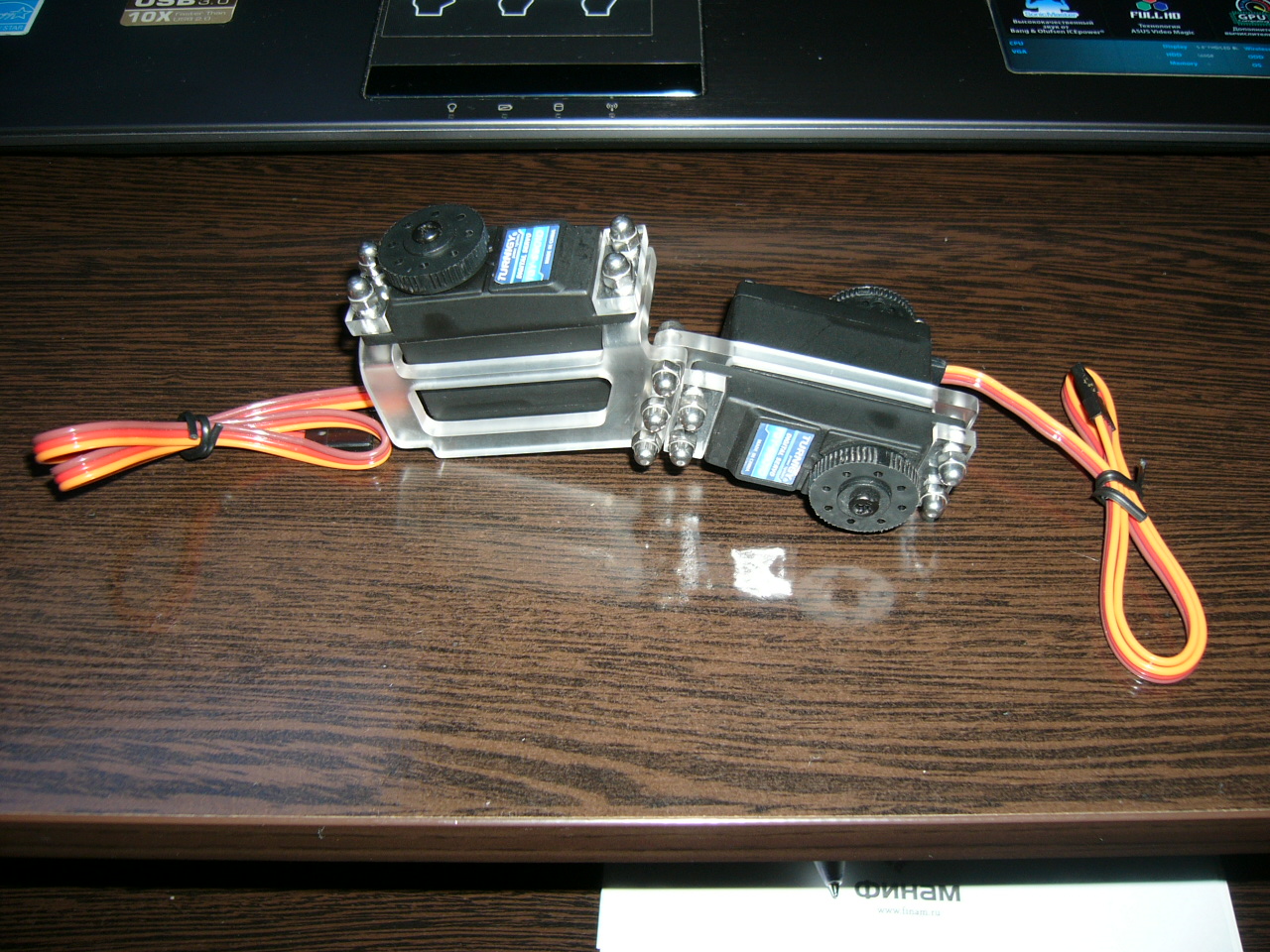
Постепенно доделывал детали и собирал робота. Болтики имбусы м3, гайки колпачковые все нержавейка. На фото подготовка к сборке соединения сервомашинки корпуса и бедра.

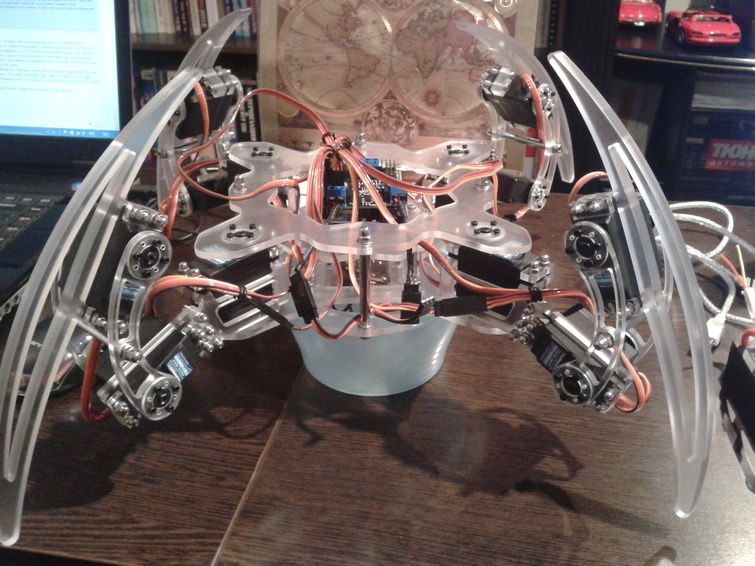
Вот так выглядит в собранном виде -
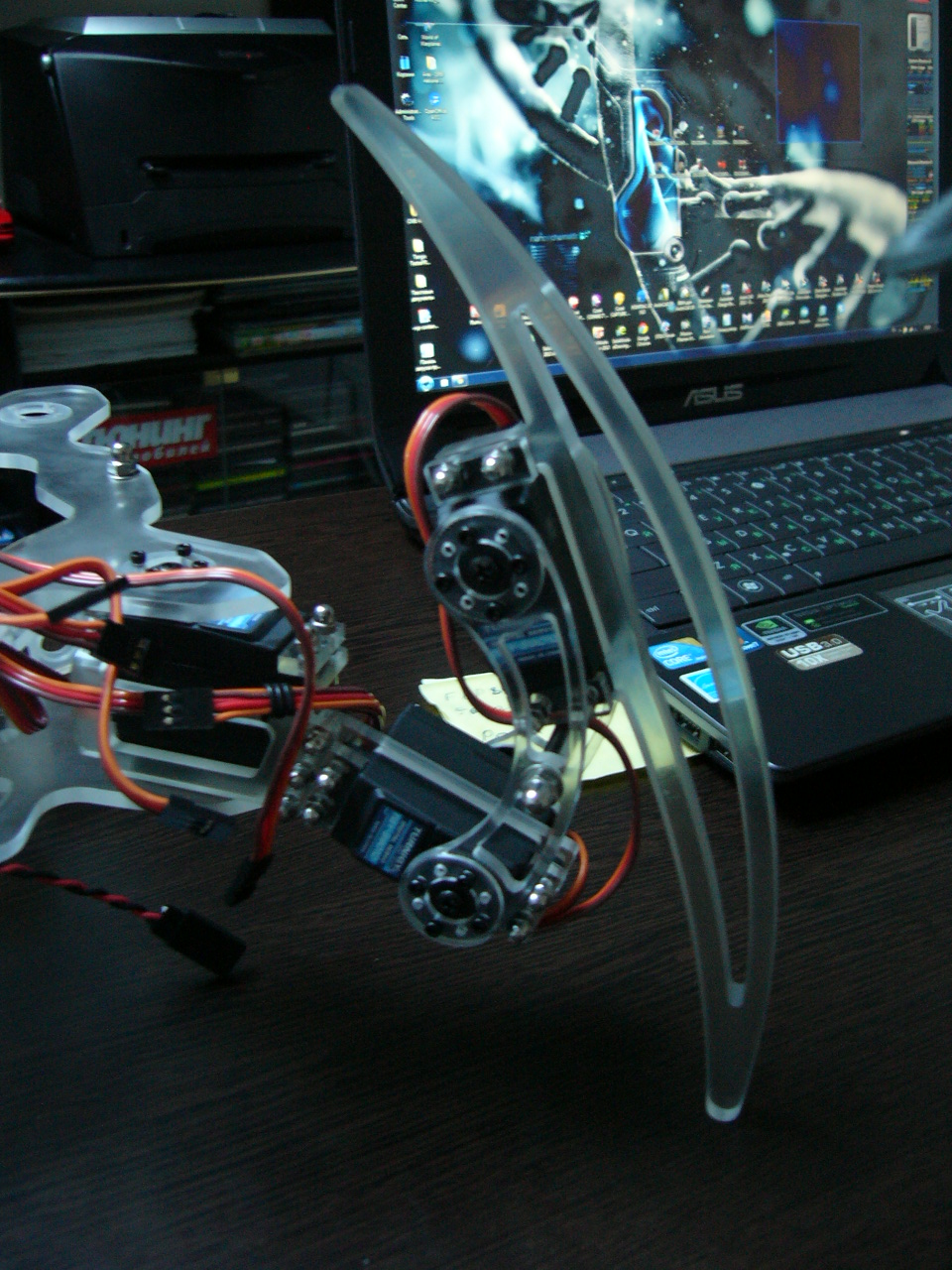
Полностью лапка паука. Болтики имбусы крепления м2
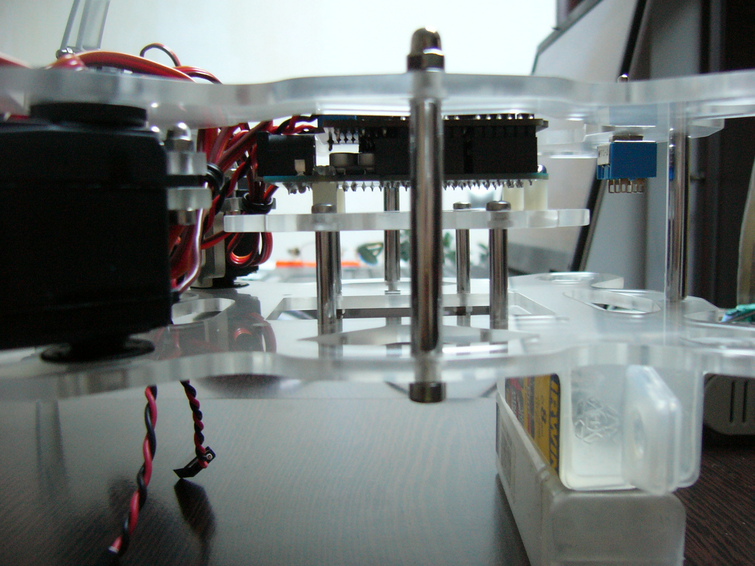
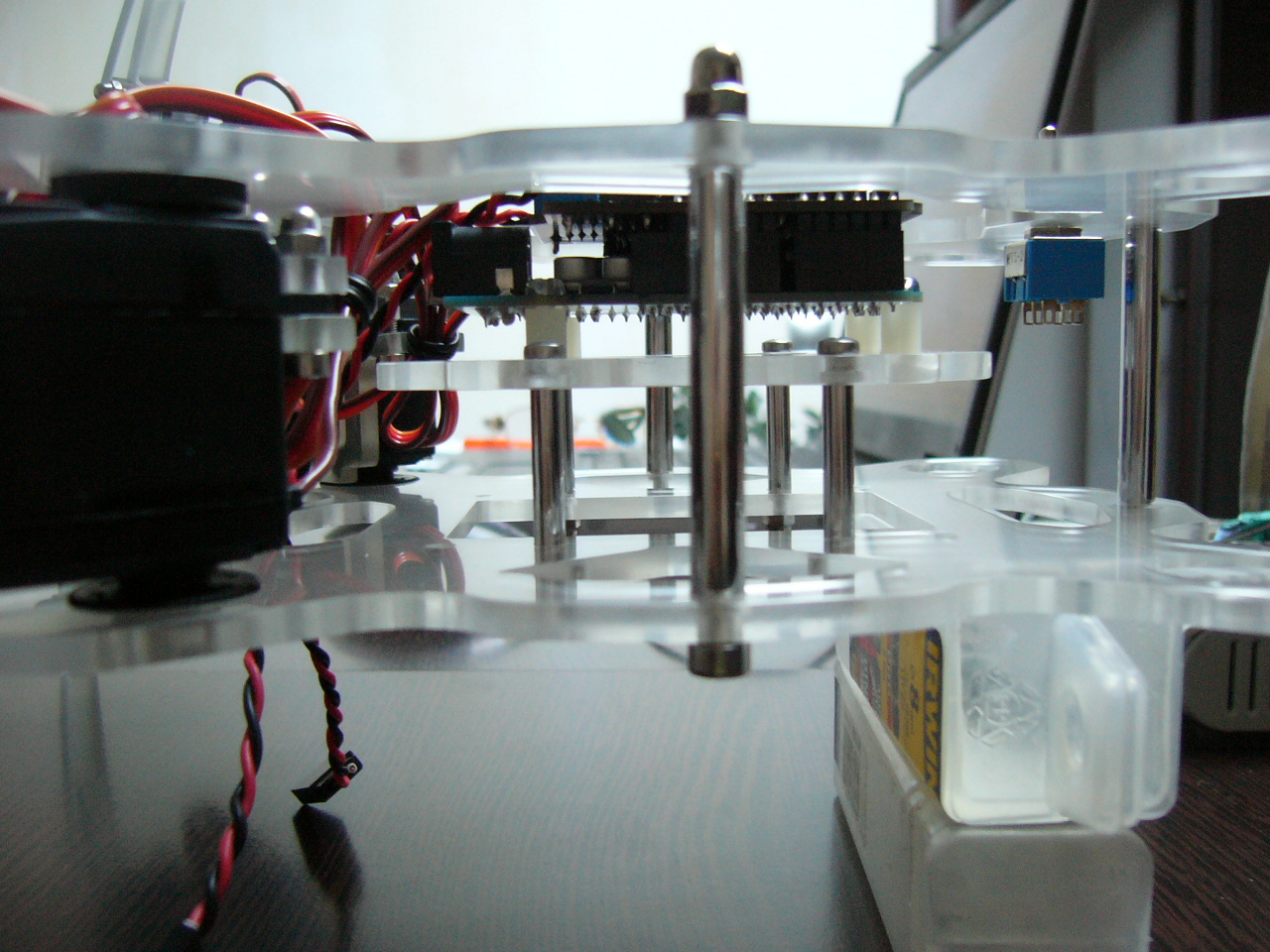
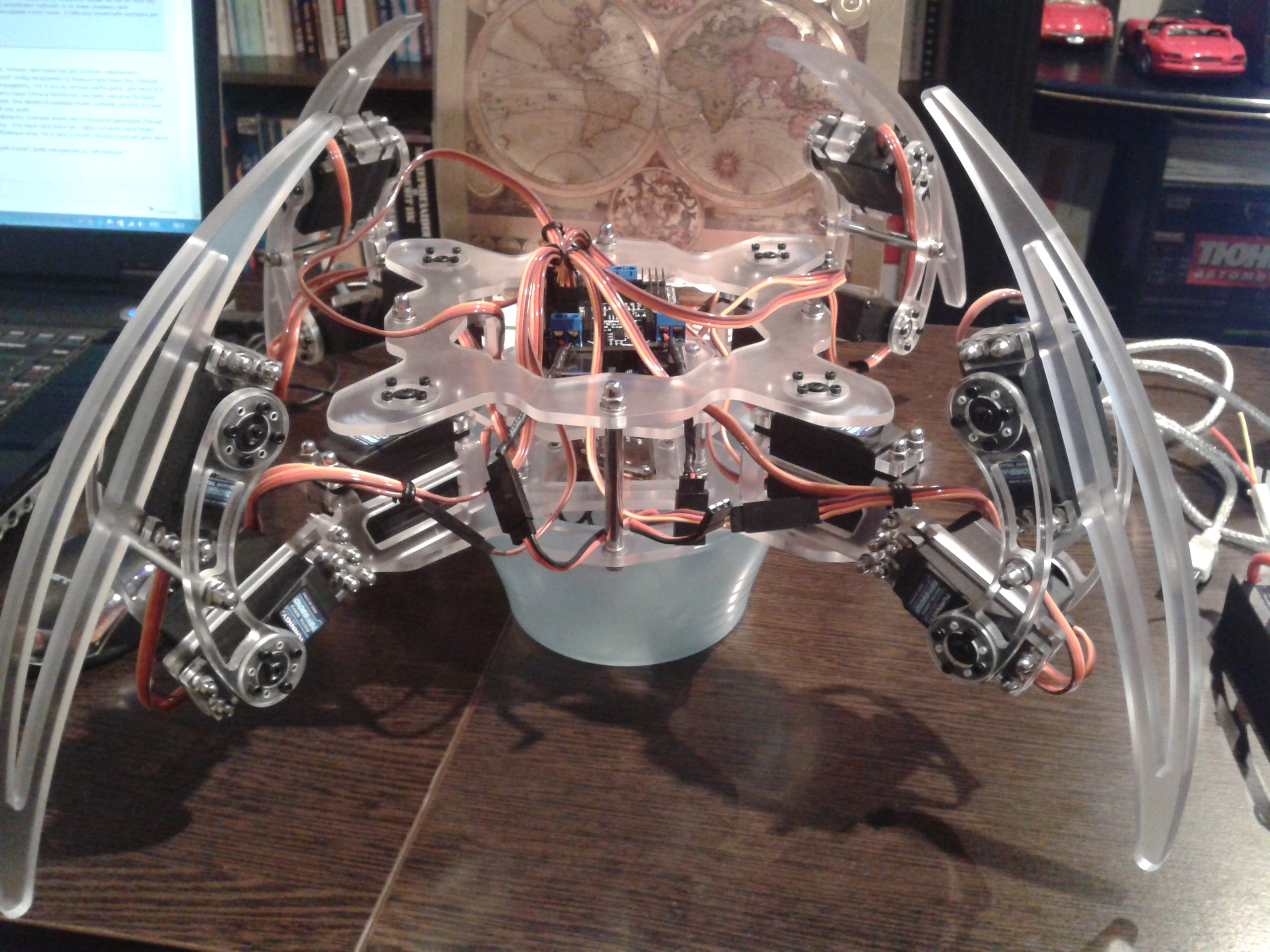
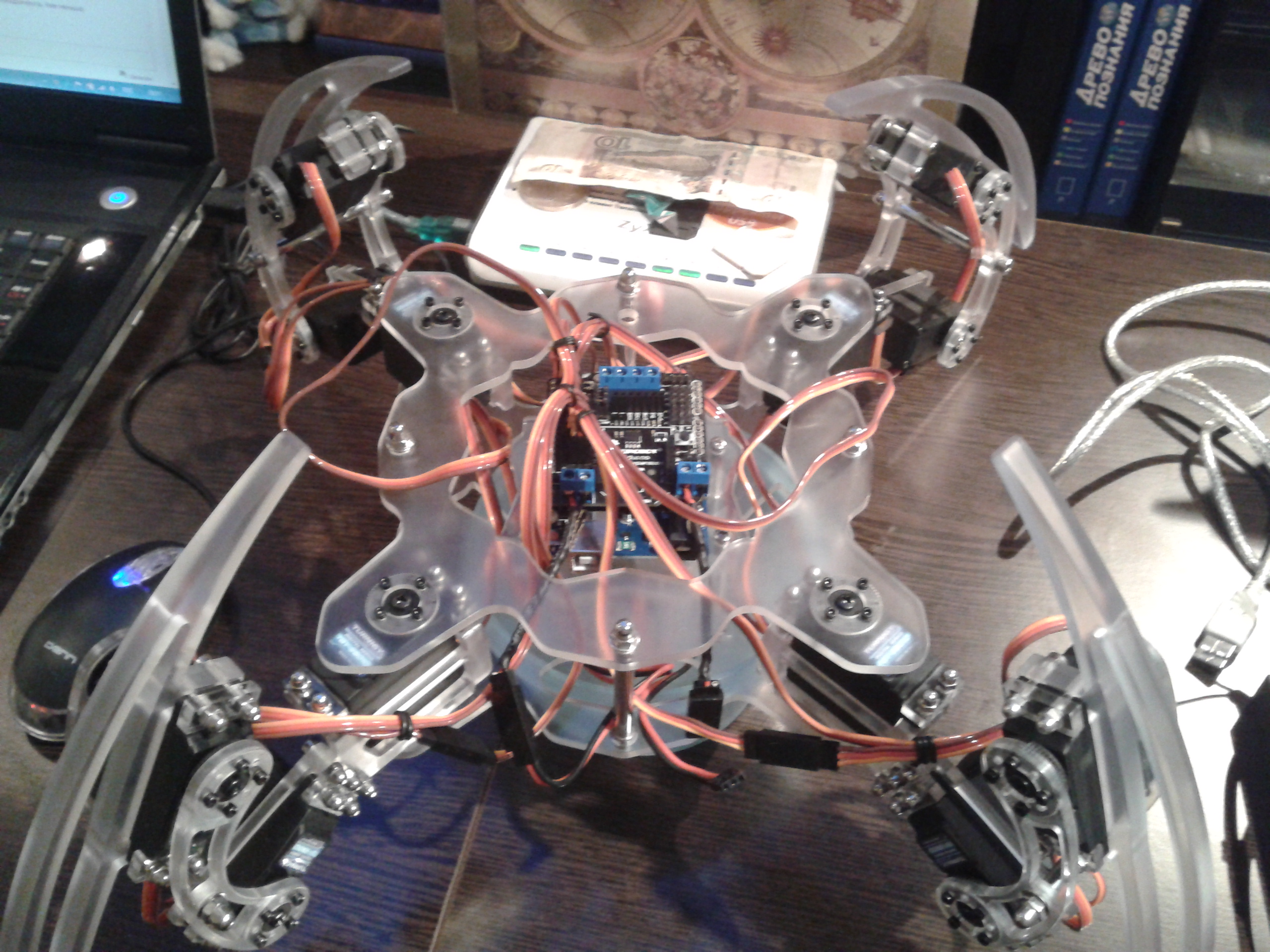
Корпус, соединения бедра и лапки укреплены. Все трубки из телевизионной антенны. Контроллер установлен на нейлоновых стойках и прикручен нейлоновыми винтами. Под контроллером будет установлен аккумулятор ниже sbec 20A. Получилось все компактно и доступно. Высота от пола до нижней части 4 см.
Планировал вес до 1,5 кг, но получилось с аккумулятором 1,6 кг. На фото ниже вес без акб.

Общий вид. В ходе сборки выявились два недостатка - 1. лапы скользят, 2. соединения под сервомашинкой корпуса отгибаются. Решение второго недостатка есть. буду с другой стороны сервомашинки на станке фрезеровать планки из оргстекла, и через трубку на винты крепить. По первому сомнения либо резину на винты, либо жидкой резиной заливать кончики.
Еще фото -

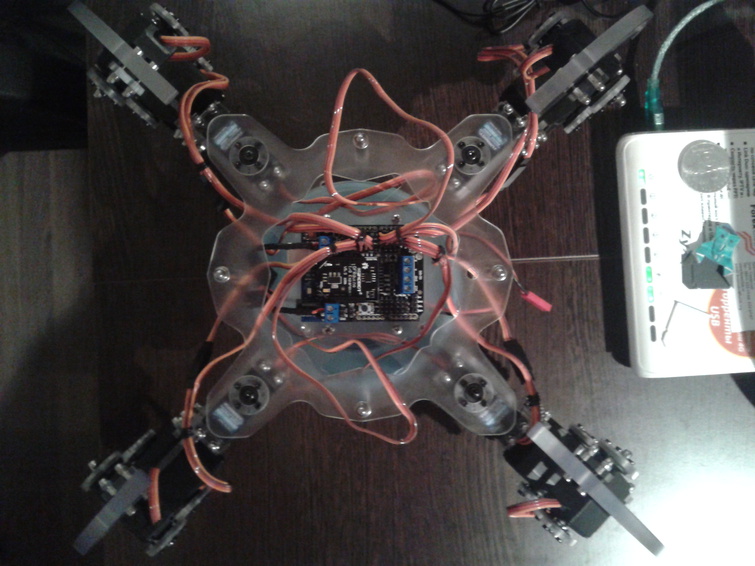
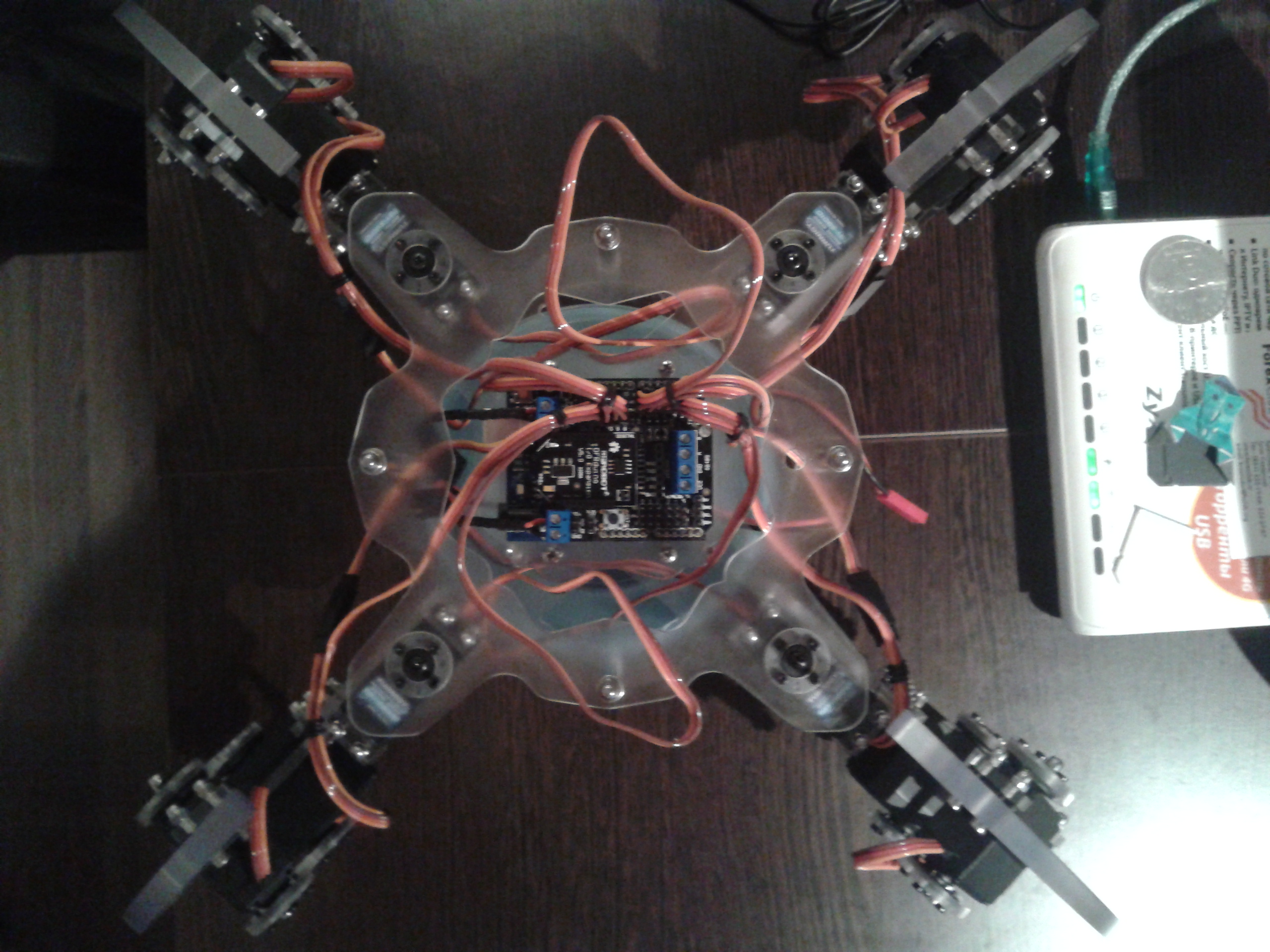
Вид сверху -
После окончательной сборки осваиваю язык программирования. На сайтах много всяких готовых шаблонов и написанных программ. Я не программист и элементарные движения получается сделать например: пошевелить лапой или сдвинуть под определенный угол всю ногу, но вот не понимаю как описать цикл движения в ту или иную сторону. Более того сделать управление через блютус с компьютера.
Над программным кодом сейчас работаю.
Все спасибо.
Все запчасти на робота заказывал на паркфлаере. Первая часть деталей пришла в течении 1,5 месяца, а последующие 2 посылки в общем пришли в течение 7-8 месяцев. Задержка в доставке была из-за сбоя в работе hobbyking и российской таможни. В углу слева на фото предварительная сборка робота.
Перечень деталей робота:
Сервы - Сервопривод Turnigy TGY-S901D с металлическим редуктором для робототехники 13кг / 0.14сек / 58г - 12 шт.
Контроллер - Arduino Uno R3 Microcontroller - Atmel ATmega328 - 1 шт.
Шилд - http://www.electronshik.ru/card/plata-kommutatsii-dlya-arduino-114472 - 1 шт.
Батарея - Аккумуляторы Turnigy nano-tech 5100mah 2S3P 65~135C литий-полимерные в жестком корпусе (сборка из 2шт.) - 1 шт.
Sbec - Источник бортового питания Hobbyking YEP 20A HV (2~12S) SBEC с переключаемым выходным напряжением - 1 шт.

Пока ждал посылки из поднебесной, начал искать, где можно сделать лазерную резку. В качестве корпуса и соединения лапок выбрал оргстекло 4 мм, лапки акриловый лист 8 мм, так как площадь опоры будет больше. В фирме все детали обсчитали и озвучили огромную сумму. Нашел другую и заказал детали на фрезерном станке. После фрезеровки все детали обработал и отполировал в ручную.

Постепенно доделывал детали и собирал робота. Болтики имбусы м3, гайки колпачковые все нержавейка. На фото подготовка к сборке соединения сервомашинки корпуса и бедра.

Вот так выглядит в собранном виде -
Полностью лапка паука. Болтики имбусы крепления м2
Корпус, соединения бедра и лапки укреплены. Все трубки из телевизионной антенны. Контроллер установлен на нейлоновых стойках и прикручен нейлоновыми винтами. Под контроллером будет установлен аккумулятор ниже sbec 20A. Получилось все компактно и доступно. Высота от пола до нижней части 4 см.
Планировал вес до 1,5 кг, но получилось с аккумулятором 1,6 кг. На фото ниже вес без акб.

Общий вид. В ходе сборки выявились два недостатка - 1. лапы скользят, 2. соединения под сервомашинкой корпуса отгибаются. Решение второго недостатка есть. буду с другой стороны сервомашинки на станке фрезеровать планки из оргстекла, и через трубку на винты крепить. По первому сомнения либо резину на винты, либо жидкой резиной заливать кончики.
Еще фото -
Вид сверху -
После окончательной сборки осваиваю язык программирования. На сайтах много всяких готовых шаблонов и написанных программ. Я не программист и элементарные движения получается сделать например: пошевелить лапой или сдвинуть под определенный угол всю ногу, но вот не понимаю как описать цикл движения в ту или иную сторону. Более того сделать управление через блютус с компьютера.
Над программным кодом сейчас работаю.
Все спасибо.













По-поводу скольжения: резинки на винты посадить быстрее, но у вас всё сделано так аккуратно, я бы не стал портить внешний вид. Я бы всё-таки залил бы жидкой резиной (какие-нибудь жидкие гвозди). Потребуется изготовить форму для заливки "ступни", или подобрать какую-нибудь крышечку от бутылки или какой-нибудь колпачек. Просверлить в нижней части одну дырку параллельно горизонту (для фиксации) и залить. Будет нелишним использование какого-нибудь вибростолика. Потом огрехи можно будет подрезать ножом.
Ставлю плюс, но хочется увидеть движения конечностей вашего робота (оценить моторику).
По поводу большого рычага в суставах - движение робота будет медленным и размеренным, поэтому ход сустава будет коротким.
Перечень деталей робота:
Сервы - http://www.parkflyer.ru/product/643070/ - 12 шт.
Контроллер - http://www.parkflyer.ru/67623/product/512191/ - 1 шт.
Шилд - http://www.electronshik.ru/card/plata-kommutatsii-dlya-arduino-114472 - 1 шт.
Батарея - http://www.parkflyer.ru/67623/product/114108/ - 1 шт.
Sbec - http://www.parkflyer.ru/67623/product/1088446/ - 1 шт.
В скором будущем докуплю Bluetooth Bee для управления с компьютера.
Благодарю всех кто поддерживает.
С Уважением Сергей.
Просто выложил фото запчастей не дособрал нифига ,ни тебе ссылок на запчасти ,ни тебе видео Какая польза. .Закончи работу тогда и пиши .Это даже на обзор не катит,так выглядит как хвастовство, а толку (0)