
Аппаратура РУ Turnigy 2.4Ghz 6Ch Tx (Mode 2) как недорогая, достаточно функциональная, очень популярна среди авиамоделистов. Но, к сожалению она не имеет функции изменения расхода рулей модели. Отсутствие функции изменения расхода рулей здорово мешает при испытательным облете новых моделей. Можно, конечно, механическим образом уменьшить расходы рулей на качалках серв, однако каждый раз переставлять тяги на качалках серв несерьёзно. Правильное решение этого
недостатка – несложная доработка передатчика с изменением расходов непосредственно в каналах управления элеронами и рулём высоты. После чего станет возможным выбирать степень расхода рулей
50% и 100%.
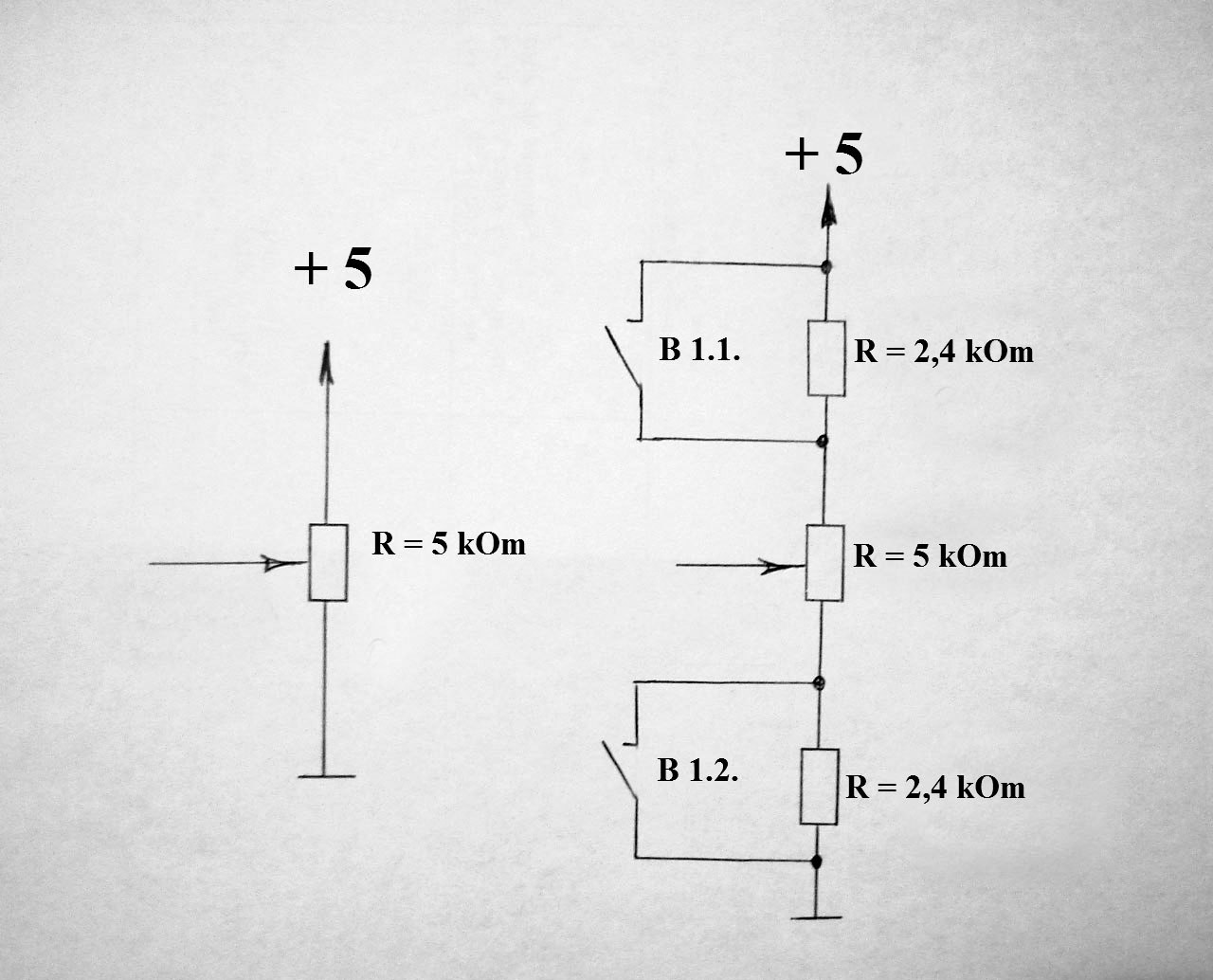
Переменные сопротивления в этом передатчике имеют величину 5 кОм. Поэтому дополнительные резисторы я выбрал по 2,4 кОм, что изменило диапазон управляющего напряжения, снимаемого с переменного резистора ровно в два раза и в свою очередь уменьшило угол отклонения качалки сервы ровно в два раза. Было 40 градусов в каждую сторону от нейтрали, а стало 20 градусов.
Вначале сверлим в передней панели передатчика 2 отверстия Ф 5 мм под тумблеры.
Отпаиваем провода № 1 и 3 от резистора управления элеронами (№ 2 не отпаиваем) и отпаиваем провода № 4 и 6 от переменного резистора управления рулем высоты (№ 5 не отпаиваем). 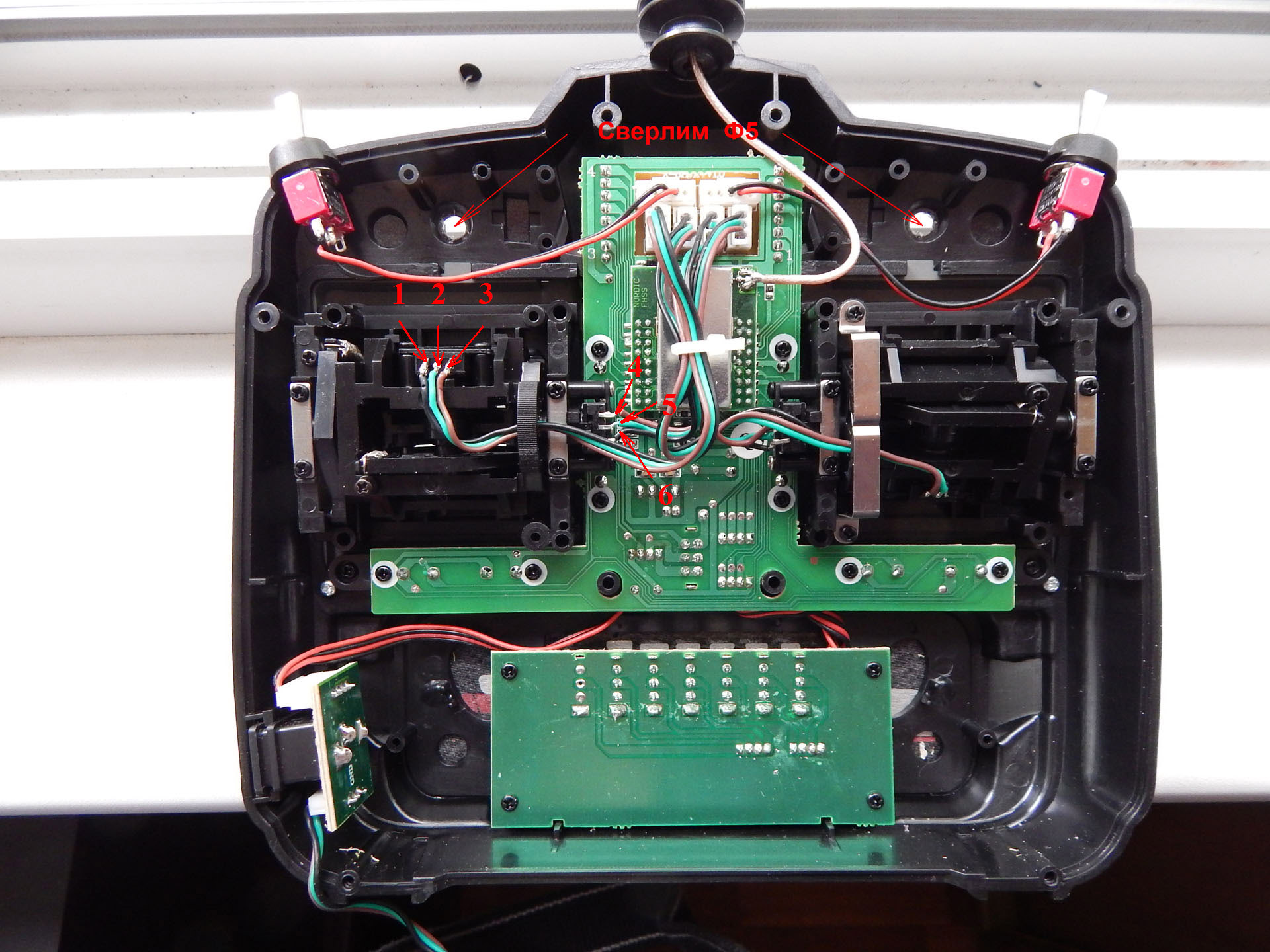
Для коммутации резисторов использовал два микро тумблера, каждый с двумя группами контактов, которые установим на передней панели передатчика.
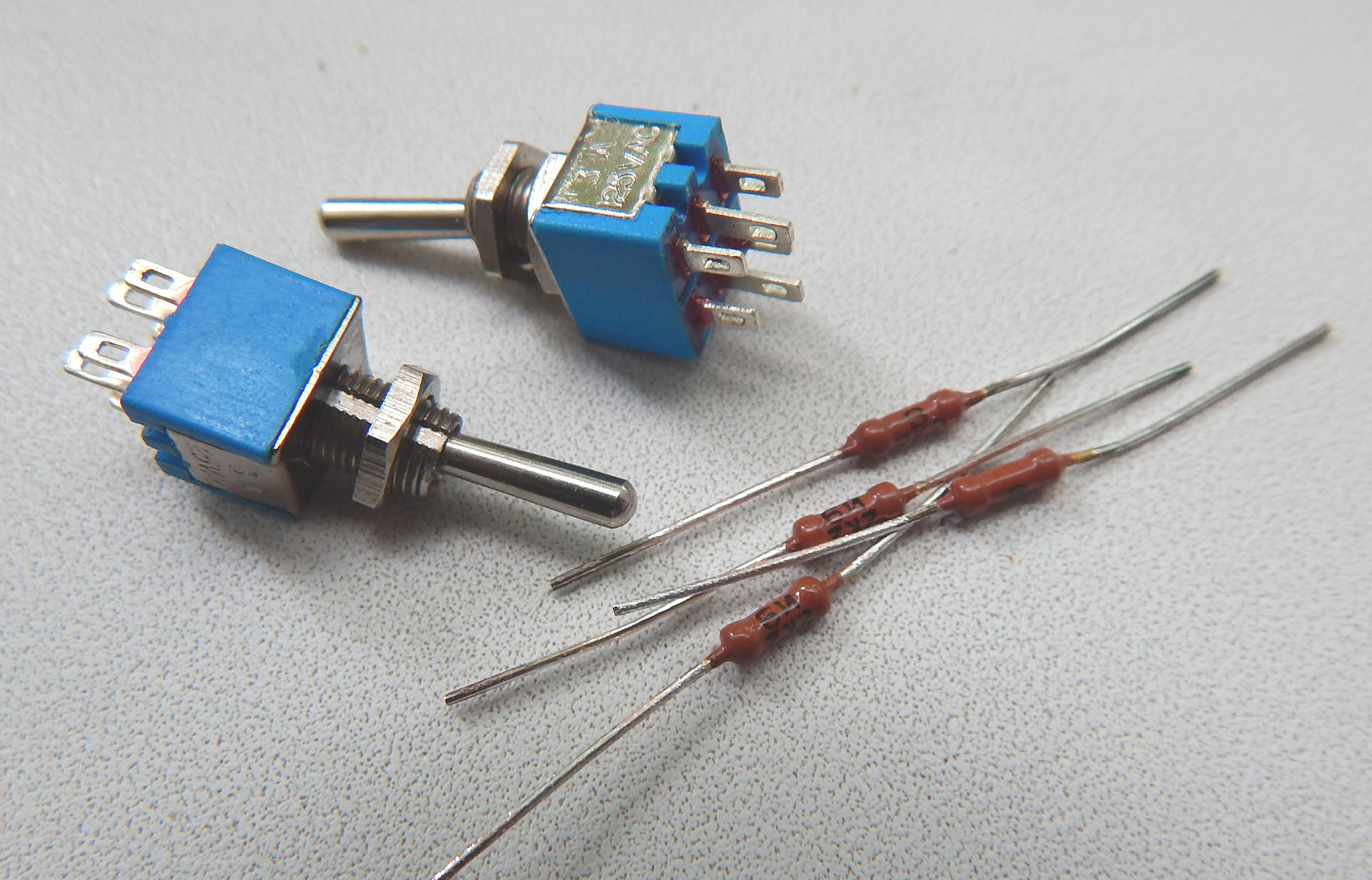
Предварительно распаял на каждый тумблер по 2 резистора 2,4 кОм. Резисторы типа МЛТ-0-125.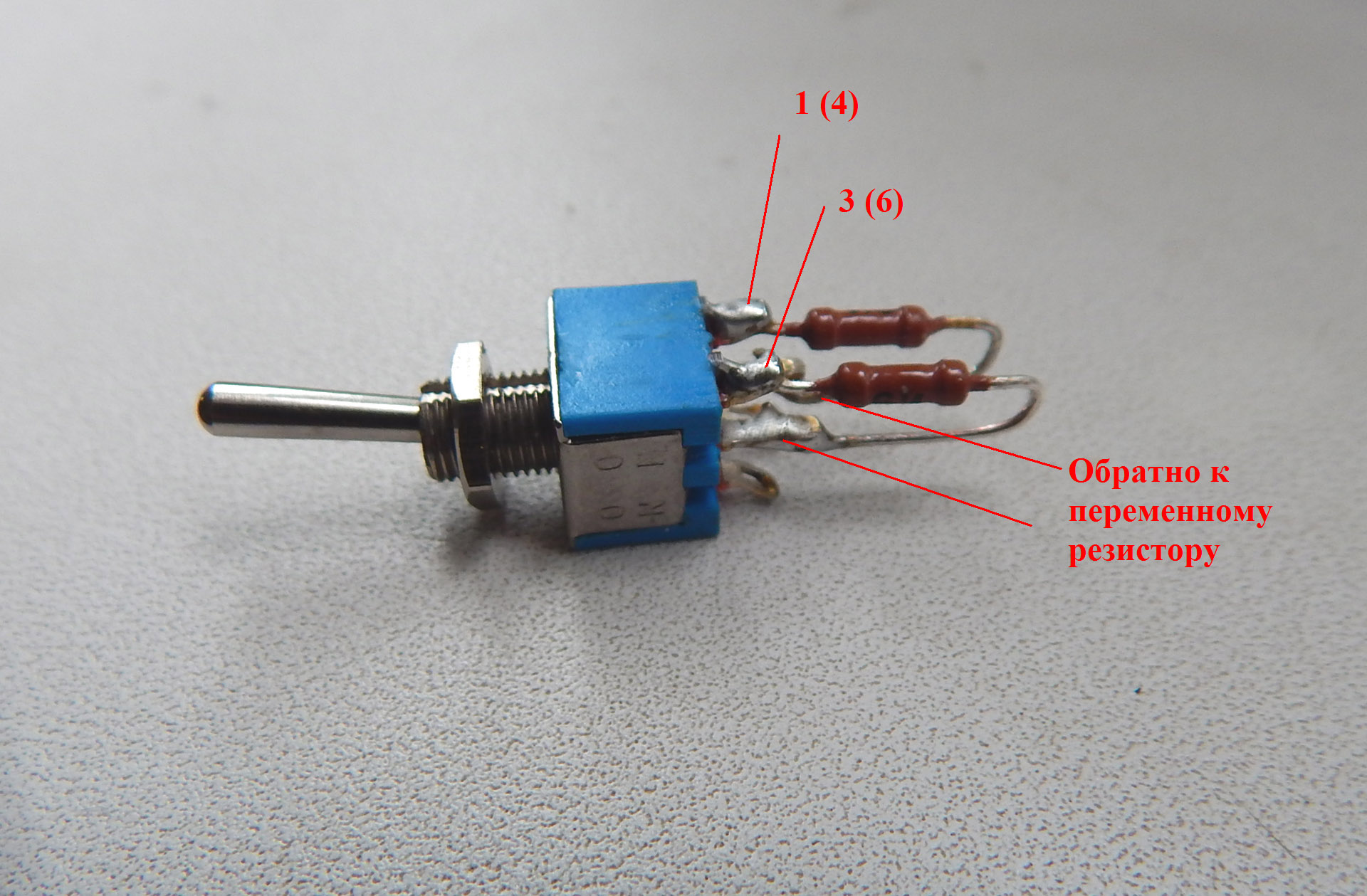
Затем распаиваем тумблеры в соответствии со схемой - провода № 1 и 3 припаиваем к одному тумблеру, а № 4 и 6 к другому. Берем дополнительные провода - 4 шт. и припаиваем к соответствующим контактам на тумблерах и к освободившимся контактам соответствующих переменных резисторов. 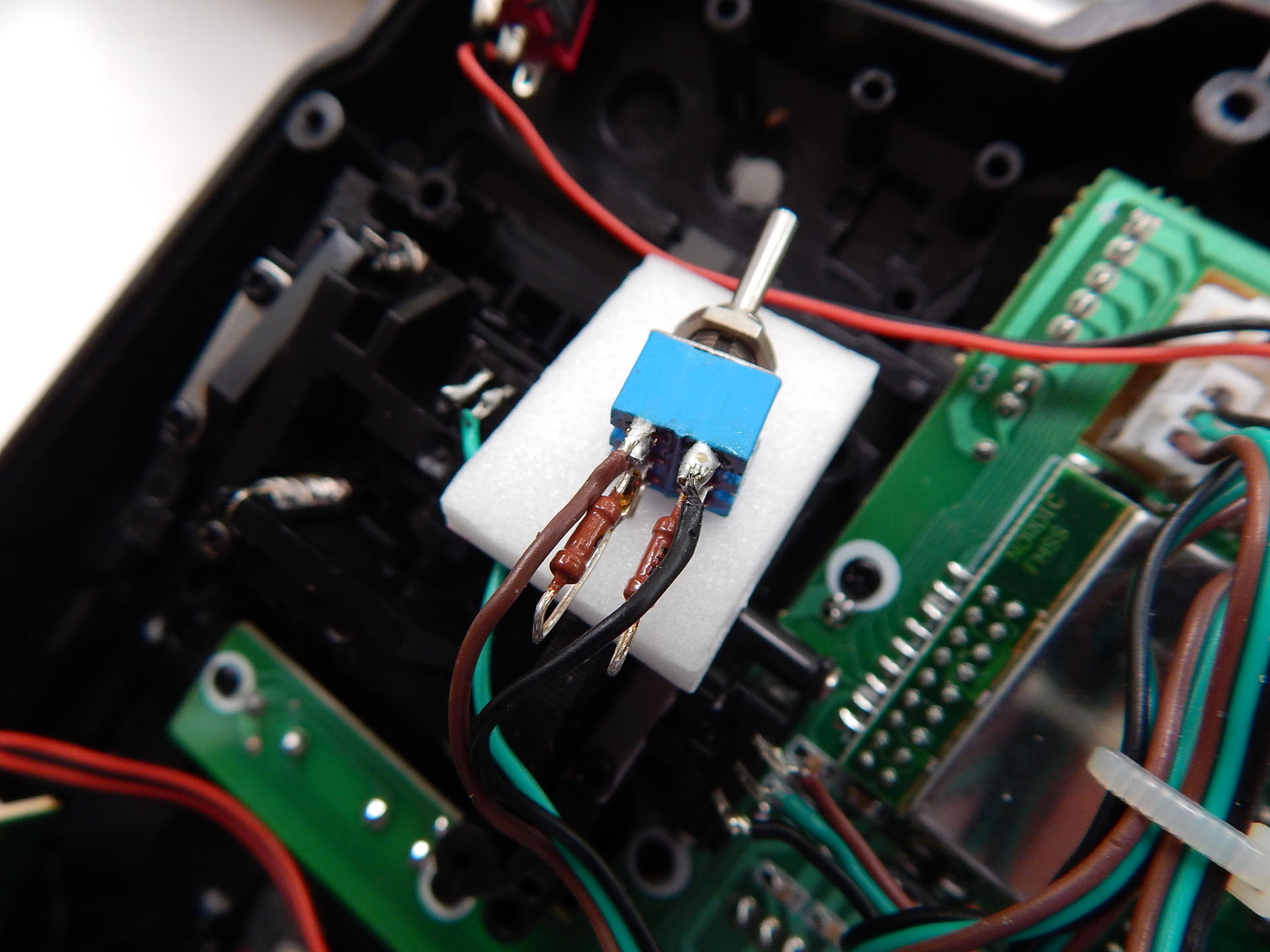
Установливаем тумблеры на свои места в передней панели.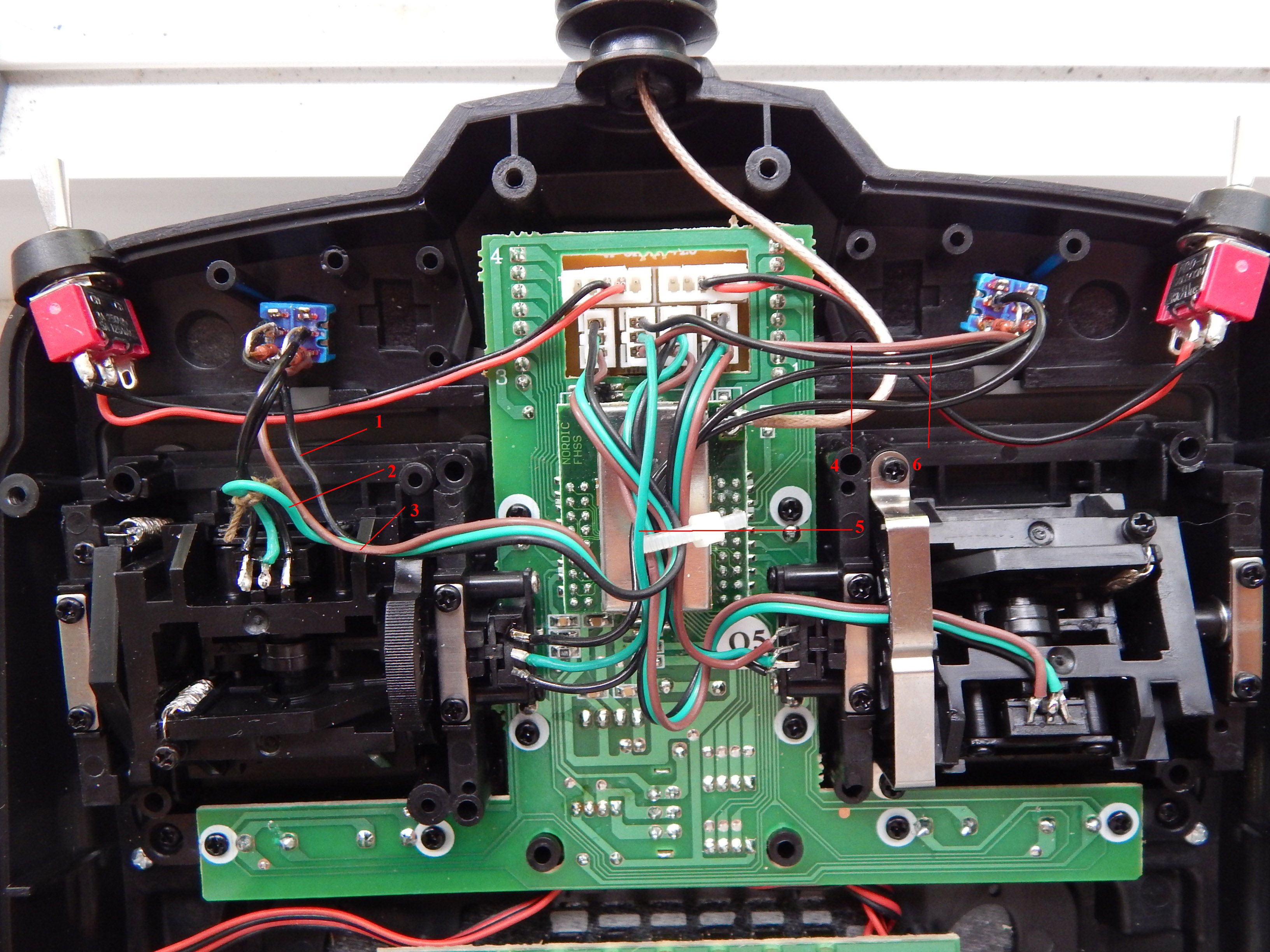
Теперь задача изменения расхода рулей решается простым переключением микро тумблеров - тумблеры вниз - 50% расходов", тумблеры вверх - 100% расходов".

Все получилось очень просто. Тумблер расходов рулей высоты расположен слева, а тумблер расходов элеронов справа. На всю работу ушло 1,5 часа времени.
На видео видно, как изменяется угол отклонения качалок серв в зависимости от выбора величины расходов
.













Игорь, вы меня шокировали...
Можно, еще учитывать и сопротивление входного каскада АЦП, но там железно стоит операционный усилитель, входное сопротивление которого можно считать бесконечно большим.
А импульс о котором я говорю - собственно тот сигнал, ширина которого является информацией о требуемом положении РМ.
Учите матчасть.
Научите вашей матчасти
Вот и выходит, что АЦПуха при наращивании величины добавочных резисторов будет выдавать все меньше циферок при одинаковых движениях стиком.
Соответственно и на качалку будет поступать меньше вариантов управляющего сигнала. В крайнем случае (когда сопротивление родного потенциометра пренебрежимо мало супротив довесков) машинка и вовсе застрянет в среднем положении.
Да, косякнул: максимальная цифирка на 8-ми разрядной АЦПухе будет 255. Но это мелочи.
Ваши слова же "Увеличивая сопротивление добавочных резисторов можно превратить аппаратуру в двухпозиционную, отрабатывающую только крайние положения. Или вовсе не реагирующую на оператора."
Резосторами режем верхнюю границу - максимальное отклонение. Снимайте минус.
Верхний резистор уменьшает верхний диапазон измерений, нижний резистор повышает нижнюю границу измеряемого диапазона. Минус не сниму пока не поймете. Закон Ома для участка цепи Вам в помощь.
"Т.е. точность позиционирования вала РМ" - шаг четкий, границы урезаны - мы рулим на меньший угол без потери точности в допустимом диапазоне. Или мы путаемся в понятих или кто-то из нас что-то упустил в разговоре.
Теперь по понятиям: я к вопросу о точности позиционирования подхожу так (поправьте, ежели в чем навру): ежели ход стика от края до края поделить на количество выходных состояний АЦП (в нашем примере - 256), то максимальная точность отработки РМ будет тогда, когда каждому из 256-ти положений стика соответствует конкретное и единственное положение вала РМ. При наращивании сопротивлений довесков (как мы уже убедились, кажется) количество состояний РМ становится меньше, т.е. по моему разумению точность позиционирования РМ относительно перемещений стиков снижается.
Да, пока дуркую с Вами нарисовал схемку, поясняющую почему корректируются и нижняя и верхняя граница измеряемого диапазона (см. ниже).
По вашему русинку получается то же самое - ведь управляющее напряжение снимается с центрального вывода ПР.
Точность останется как и была...
Вчера я написал "...приводит к уменьшению точности позиционирования качалки рулевой машинки относительно перемещения стика...".
Где противоречие в моей фразе, если обсуждаемая доработка, 256 положений рулевой машинки сводит до 128 (если рассматривать номиналы резисторов, указанные автором), одновременно уменьшая угол поворота вала?
При ограничении хода качалки до 50% получаем что на каждые 2% стика приходится 1% качалки - где же тут потеря-то? Или вы от обратного идете - отклоняем качалку и смотрим где стик оказался?
- Принцип простейшего делителя напряжения я до Вас донес (со скрипом);
- Работу АЦП в этой схеме я Вам уже объяснил;
- Вкратце рассказал об устройстве рулевой машинки;
- Дал определение термина "точность".
Считаю, что на сегодня репетитором наработался.
Ставлю "+". Надеюсь Вы тоже смените гнев на милость.
В паузах слышен щелчёк переключаемого тумблера.