
Хочу выставить на обозрение ещё одну нашу модель в масштабе 1/8. БМП особо на форумах не освещалась даже подробный фотоотчёт не делался. На этой модели много инноваций , которые раньше не использовались на предыдущих наших моделях. И как говорится присутствует гриф "секретно" в плане электроники, а именно стабилизации вооружения.
Модель полностью изготовлена из фанеры в ручную, без использования лазерной резки. Детали корпуса вырезались электролобзиком, а катки кольцевой пилой на сверлильном станке. Толщина фанеры корпуса от 4 до 8 мм. Так как модель плавающая снаружи модель полностью пропитана эпоксидной смолой, а изнутри влагостойким лаком. Все элементы подвески находятся снаружи корпуса для полной герметичности модели. К сожалению это немного повлияло на ход подвески, а многие привыкли видеть как настоящая БМП "клюёт носом" при торможении,тут такого эффекта нет. А так подвеска полностью рабочая. На фото катки без бандажей, в качестве бандажей использовался резиновый шланг подходящего диаметра.
Гусянка из петель, без накладок. Накладки пошли на последних двух моделях. На петлях сбоку сделаны проточки для зацепления ведущего колеса. Венец ведущего сделан из шайбы толщиной 2 мм большого диаметра.
Вот так выглядит модель перед покраской.
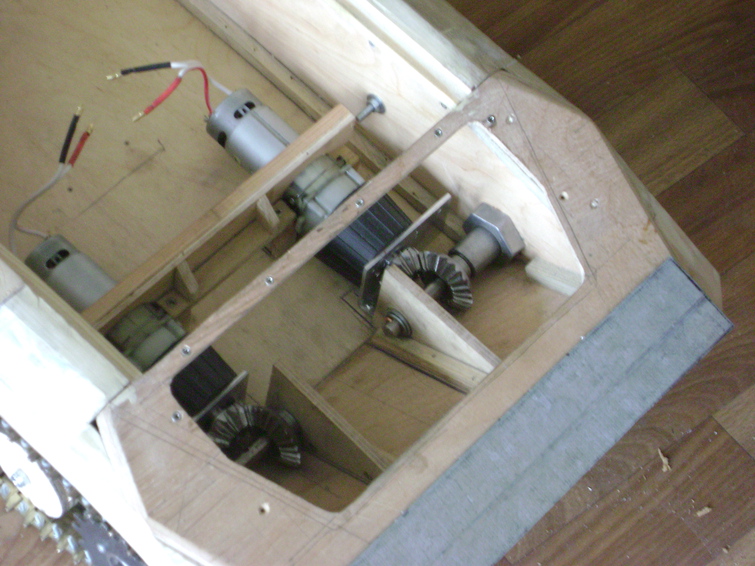
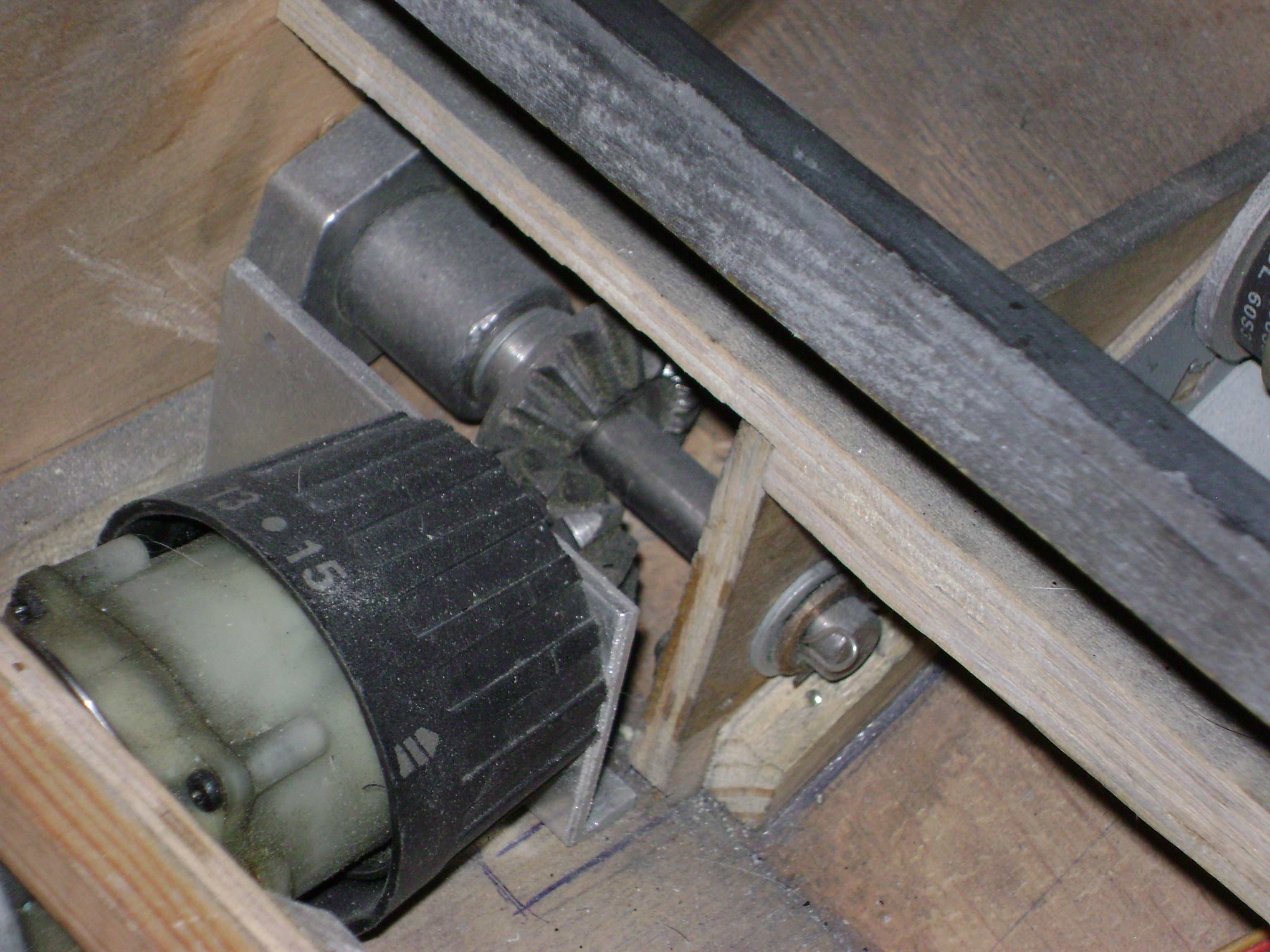
На БМП установлены двухскоростные редуктора от шуруповёртов плюс понижающая коническая передача 2:1 которую сделали нам на заказ. Моторы на 18 вольт , мощностью примерно 100 ватт каждый.
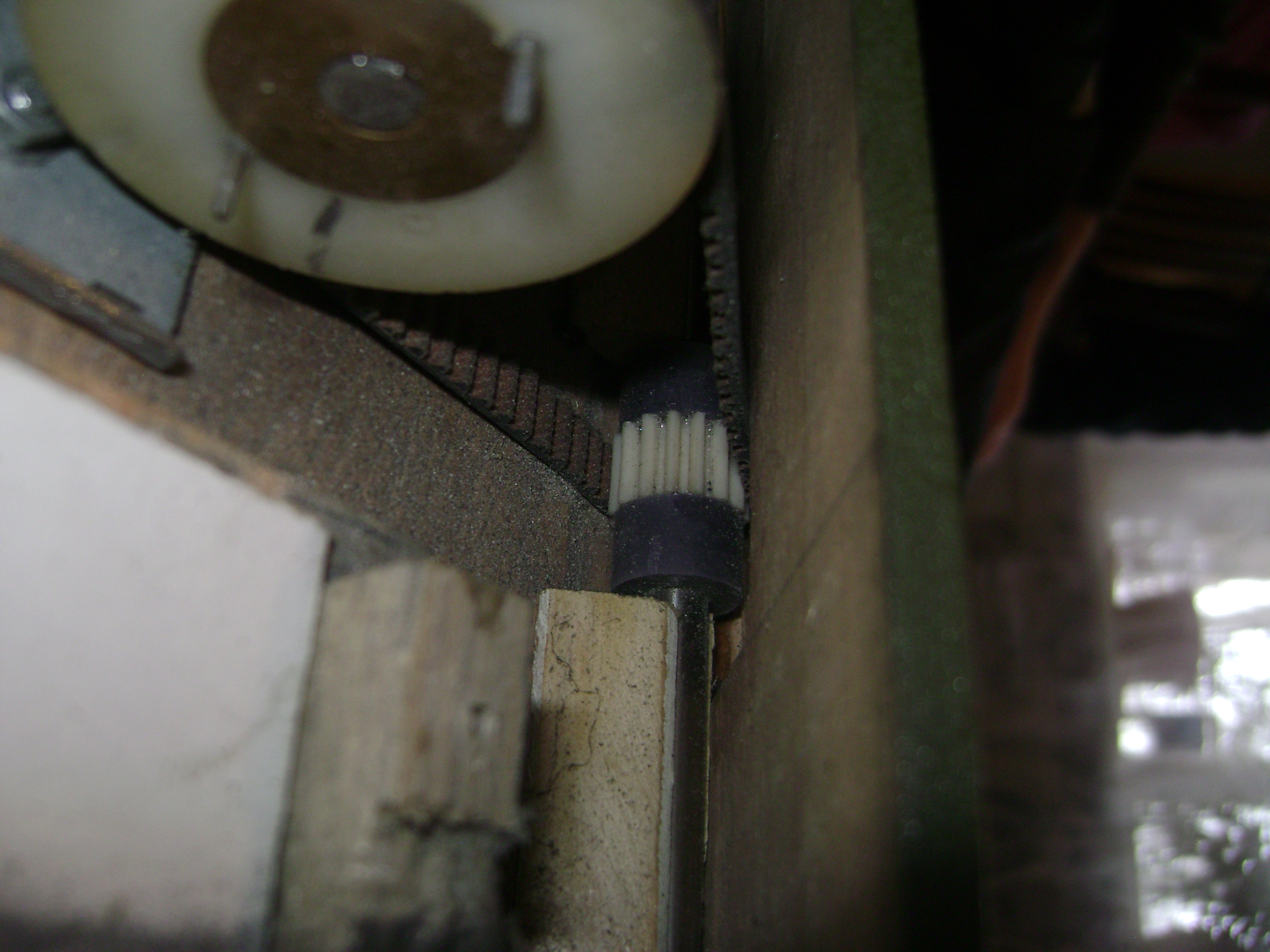
Так как модель плавающая , был сделан волноотражающий щит. Приводится в действие сервоприводом через повышающую ременную передачу от оргтехники.
Модель была испытанна в ванной, но на большую воду выходили только один раз и без видеокамеры. По прямой плывёт очень хорошо, но поварачивать не хочет. Возможно это из за отсутствия защитных экранов гусениц, которые создают эффект туннеля. А так на воде держится хорошо, ровно и на нужной высоте над водой.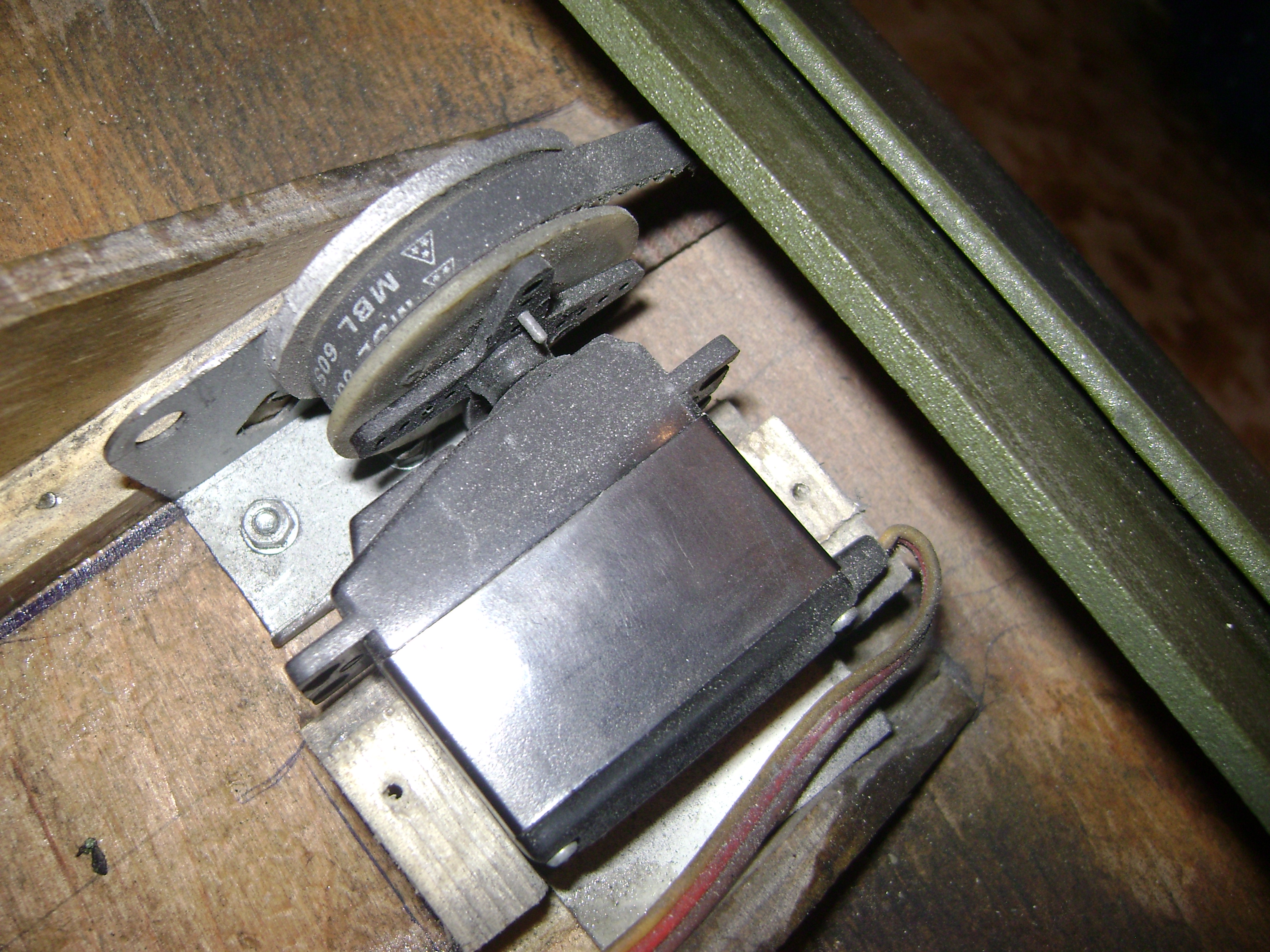
Башня сделана полностью из фанеры плюс шпаклёвка. Установлена на подшипнике миллионной серии большого диаметра и минимальной высотой. Раньше стоял редуктор , который работал через регулятор, а на данный момент установлен сервопривод переделанный на постоянное вращение.
Фото с другой модели, но принцип тот же.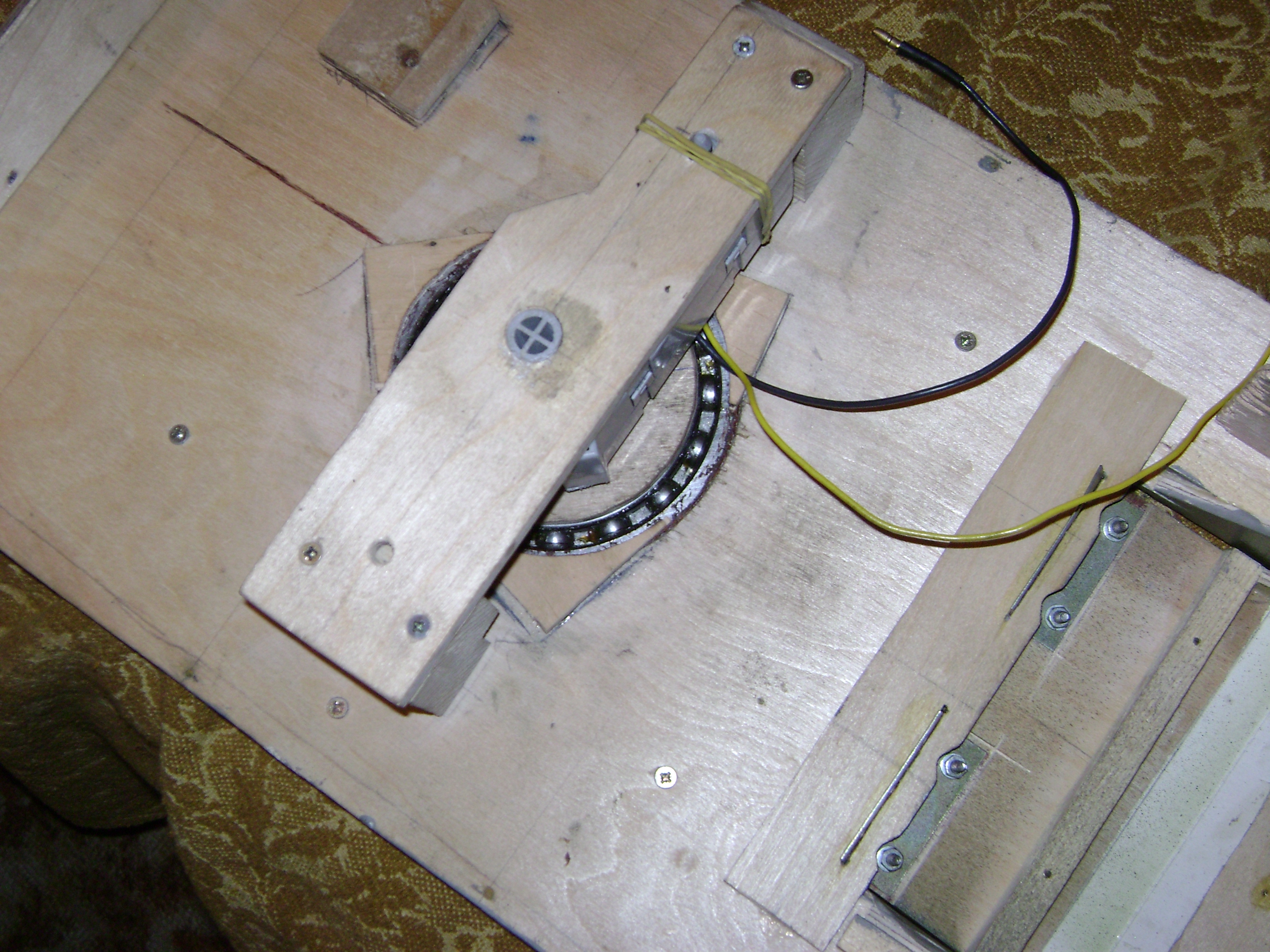
Первые испытания.
Шпаклёвка, покраска и что получаем на выходе. Масса модели в снаряжённов состоянии 15 килограмм, акки 12+6 вольт.


Испытания на улице
Скорость модели на повышенной передачи 10-11 км/ч, проверяли GPS навигатором. С такой скоростью можно побаловаться на скользкой поверхности.
Ну и самое главное в этой модели , это стабилизация вооружения. Так как я не дружу с электроникой это самое сложное. Но это ещё не идеальная работа, уже знаю как всё правильно сделать и все комплектующие есть в наличии. К сожалению внутренности пока держу в секрете от танкистов, и показать нечего. Более продвинутые пользователи могут с лёгкостью догадаться как всё работает и устроено. Обсуждение приветствуется.
Всем приятного просмотра.
Если пользователей интересуют другие наши модели (Т-64БМ2, АТС-59, ЗСУ-57-2, БМД-4) то пишите, создадим тему с описание.
P.S. Добавил видео по просьбе Сергея Александрова
Спасибо.













Очень похож на настоящий.
+++++
У меня есть небольшой сборник замедленного видео, но для достижения полного эффекта и реалистичности требуется и камера соответствующая.
Я в видео ролики всегда стараюсь внести что то особенное для каждой модели. БМП за счёт скорости может может ездить по льду боком. Т-64 действительно танк с высокой проходимостью, а АТС-59 реальный тягач. И мне самому нравиться работать с видео файлами.
А в наших моделях мы всегда показываем, что можно построить модель танка на кухне за маленькие деньги.
афтар,плюс адназначна))))
А БТР-80 случаем не собирали,я ща занят этим проектом,в 1/10.
стабилизация вооружения,с помощью гиры?
Гироскоп очень чуствителен к вибрации, особенно на гусеничной технике.
Раз вы про обсуждение написали - сделаю и я вброс инфы для обсусоливания. Мои мысли:
1. Сделать систему наведения орудия на виброизолирующих демпферах - конструкцию, жесткость и энергоемкость (о как!) - подобрать экспериментальным путем. Можно погуглить конструкции виброразвязок рам для квадрокоптеров, вибродемпферов для камер и их подвесов. Например - простейший вибродемпфер - кусок пластиковой стяжки, загнутой определенным образом, или губка для мыться посуды, или масло/воздухонаполненный шприц, силиконовые трубочки/пенёчки (самодельные или фабричные), да мало ли....
Конструкция и жесткость этих демпферов будет уникальна для вашего случая - работают величина "подрессоренной" массы и габариты. Одно дело задемпфировать только дуло с одной сервой, другое - всю башню...
2. Использовать электронику от подвеса для камер на квадрики. Датчик ставится на само дуло (внутри башни), и на проводках где-нибудь в башне (а если у вас задемпфирована вся башня - то на самом корпусе жестко) монтируется сам контроллер подвеса. После его ПРАВИЛЬНОЙ настройки (недавно была статья по настройке подвеса камеры от Юлиана с видяхами) - у вас дуло будет само следить, как танк не тряси.
Судя по видео с примером стабилизации - у вас что-то подобное и реализовано. Простите, если случайно выдал ваше ноу-хау. Если не будет ни ответов на этот коммент, ни плюсов-минусов - могу удалить этот пост. Только сообщите мне об этом, Сергей (можно комментом к другому сообщению).
Я на форумах всегда говорю- не стоит ограничиваться только танковым разделом. Нужно просматривать и другие разделы , в данной ситуации коптеры.
По 1-у пункту. Пробовал с гироскопами. Да , на поворот башни подходит, на ствол -нет.
По 2-у пункту. Подсмотрел идею там, но в двух плоскостях гироскоп в танке сходит с ума. Всё таки вибрация сильнее чем в коптерах. Плата с коптера, но и её не смог заставить правильно работать из за некоторых тонкостей. Плюс размеры башни меня ограничивают.
Продолжаем обсуждать- думаю всё раскроется, секрета нет. К тому же до сих пор ни на форумах, ни на ютубе ни кто не поинтересовался как всё устроено. Даже закидывал удочку на немецкие танкофорумы, ни ответа ни привета. Хотя они считаются лучшими копиистами в танках, и подобных систем я там не увидел. Многие до сих пор крутят башню в ручную (при повороте корпуса) .
Хотя я бы - все-таки постарался бы настроить подвес для камеры. с использованием вибродемпферов. Если подвес сходит с ума - значит в демпфировании нуждается и сам контроллер.
Но сейчас у меня лежит другая плата.
И как-то немного инертно отрабатывает. Наклон уже прошел, а пушка "еще думает".
И какие-то "послеколебания" иногда проскакивают. Стабилизация закончена вроде бы, а ещё "клевок" проходит.
И как-будто немного дискретно угол наклона меняется..... Это всё субъективные ощущения.
Но, похоже работает по принципу "все гениальное просто". Далее не буду гадать, все-таки танки - не мой профиль. Но как вариант нестандартного решения стандартной задачи - уже было интересно, спасибо за разминку для мозга. Пошел я свой коптер допиливать (а то он уже что-то заскучал на земле).
По крайней мере - я вам ещё два механических варианта стабилизации предложил - вот она, польза обсуждений.
Ладно, удачи вам!
Не перестаю дивиться рукастыми мужиками, +