Мое первое сообщение на Паркфлаере, было 7 ноября 2014 про «ударившую в голову идею», и спасибо тем, кто смог тогда дать ответ. Ну вот представляю на обозрение во что это превратилось…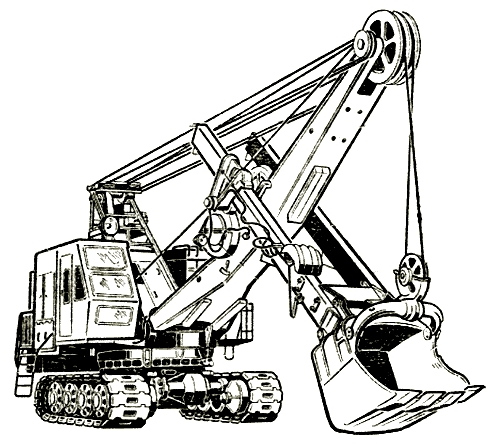
Учась на горном факультете ЗабГУ начитавшись статей о будущем горных работ решил собрать команду и с руководителем подать заявочку на грант по теме «Исследование эффективности дистанционного управления на больших(1000 км и более) расстояниях при открытых горных работ». Были слухи, что нам никак его не дадут, так как на тот момент на нашем счету по представленной теме не было ни каких публикаций, но о чудо в феврале 2015 мы его получи!
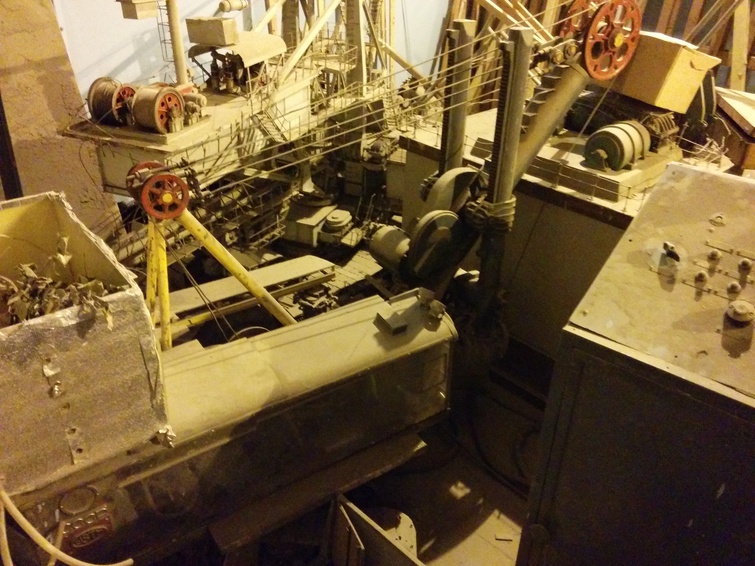
Писав заявку на грант, мы планировали лишь программно смоделировать процесс экскаватора и с помощью платформы управления произвести определенные замеры по которым и произвести исследовательскую работу, но как оказалось уже после получения гранта, в закромах (штольне) горного факультета нашелся экскаватор, точная копия экскаватора ЭКГ-4,6 1973 года в масштабе 1:10, массой 200 кг и в жутком состоянии.



 Старый(80 Вт) и новый (150 Вт) двигатели
Старый(80 Вт) и новый (150 Вт) двигатели
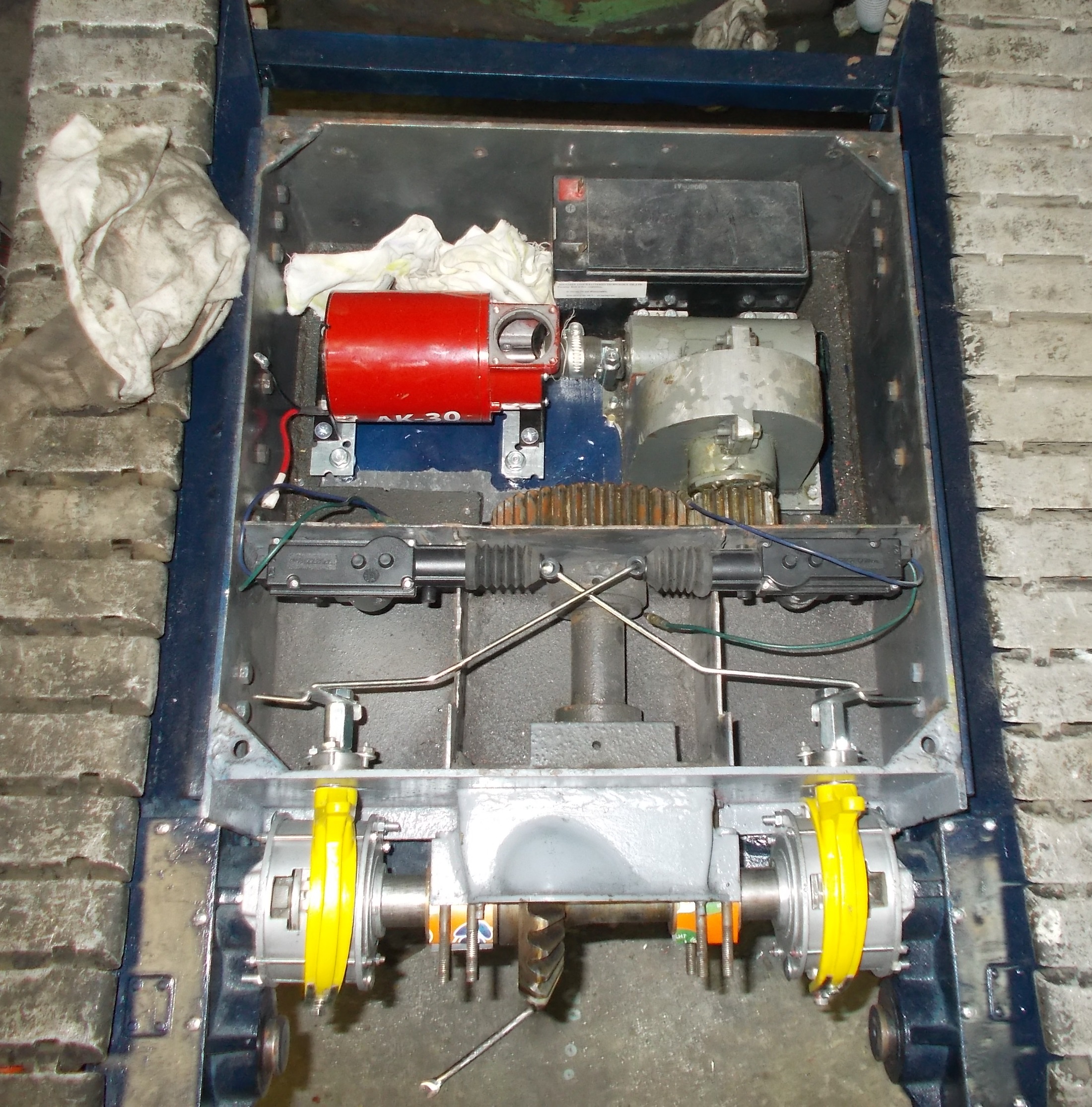
В процессе разбора экскаватора и устранения изношенных или сломанных деталей было обнаружено, что разработчики не установили механизмы поворота гусениц, хотя на пульте управления кнопки по их управлению были. Проект всё усложнялся.


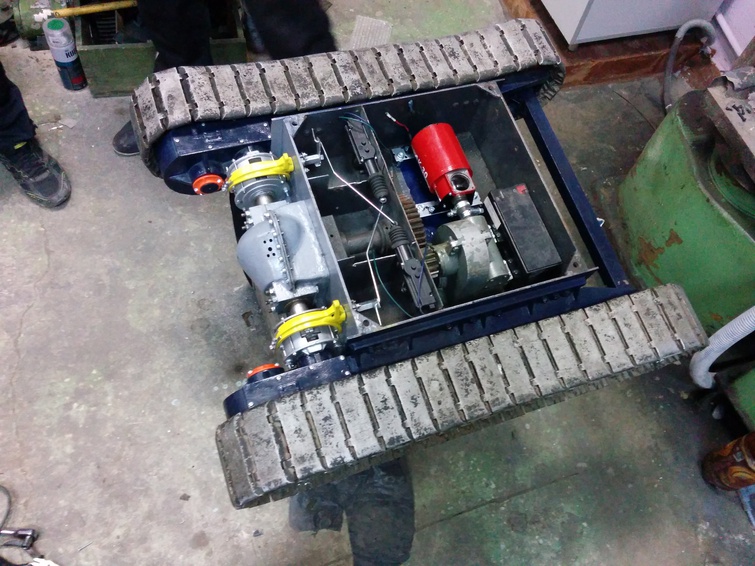
Гусеничная тележка перед и после покраской
Единственное что смогли найти более-менее в нашем городе подходящее это активатор, стоящий на замках дверях автомобиля. Усилие у него в 5 кг.
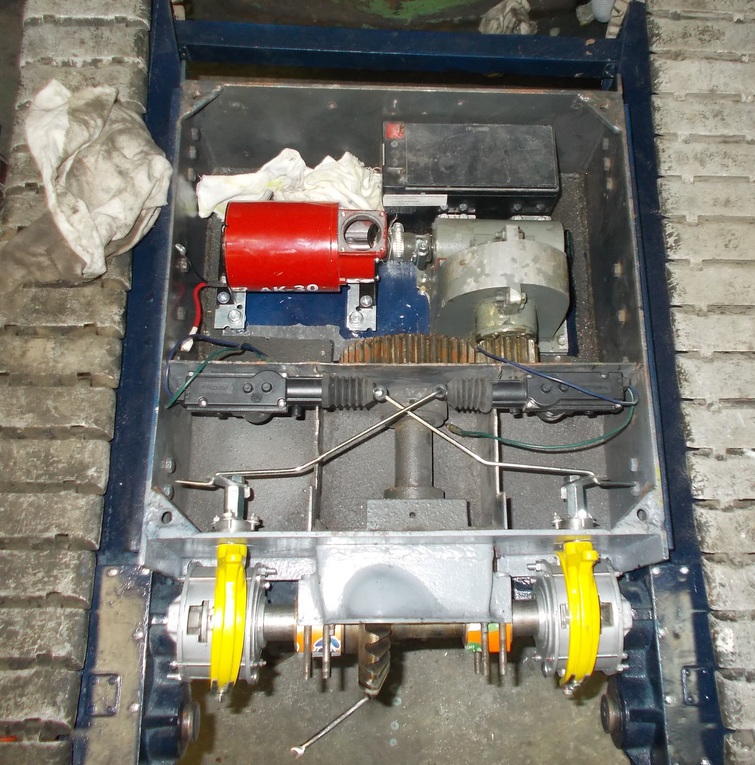
 В дальнейшем, когда всё собралось на место, их усилия вообще не хватало на отключения то одной то другой гусеницы на ходу, но программно смогли решить эту проблему путем отката назад в противоположную сторону движения перед поворотом экскаватора.
В дальнейшем, когда всё собралось на место, их усилия вообще не хватало на отключения то одной то другой гусеницы на ходу, но программно смогли решить эту проблему путем отката назад в противоположную сторону движения перед поворотом экскаватора.
Вдобавок, оказалось неработоспособной система открывания ковша устроенное на электромагнитном реле, поэтому был сконструирован механизм «Открывания ковша и автоматического сматывания металлического троса» на основе заводной пружины и двигателя от электродрели.

.1458450529291.prev.jpg)
Кстати на данных фото видно отличие данной модели от реального экскаватора – прикрученные нами два 3 мм уголка, позволяющие при давлении ковшом в землю поднимать чуть–чуть перед или одну из гусениц как это делают гидравлические экскаваторы.

.1458451254237.prev.png)
Для автономной работы был установлен генератор на 1 кВт (GNR-1000). Самое интересное то что, куплен он был в Москве, во время чемпионата по горному делу, и летел с нами в Читу в багажном отделении (вот мы с ним тогда все натаскались).
Для работы в помещении был установлен 600 Вт компьютерный блок питания Cooler master, на просторах интернета видел как от той же фирмы, но менее мощный блок питания заводил автомобиль.


.1458452280499.prev.jpg)
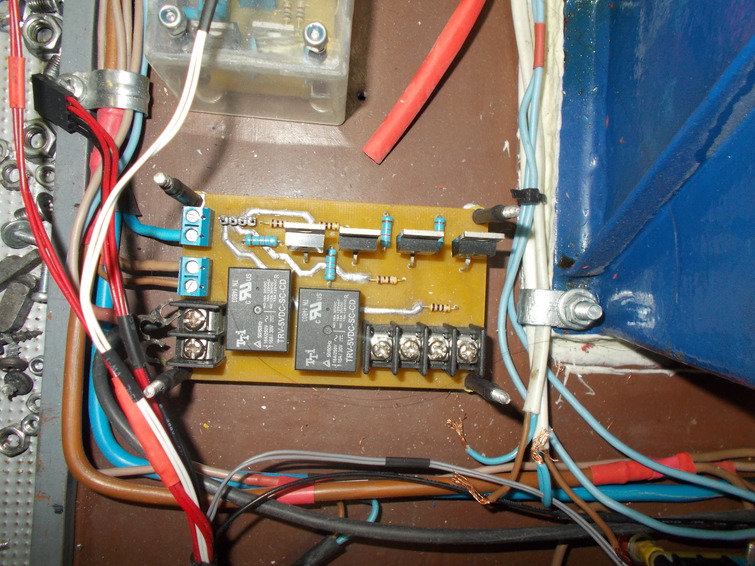
Разработаны и спаяны драйвера двигателей, так как найти подходящие и купить, оказалось сложнее научится самому паять (до этого проекта паять не умел). Кстати, при разработки драйверов задавал также вопросы на Паркфлаере, спасибо тем, кто тогда помог.
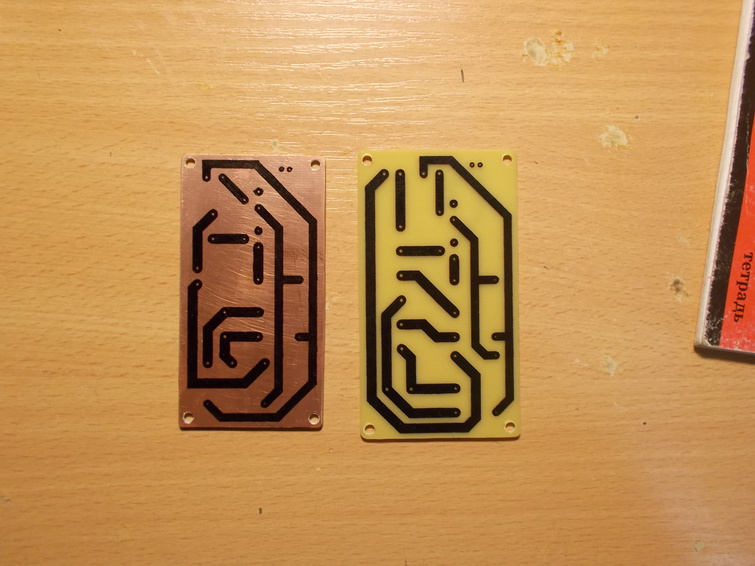
Текстолит с рисунком до протравки и после Плата двигателя хода
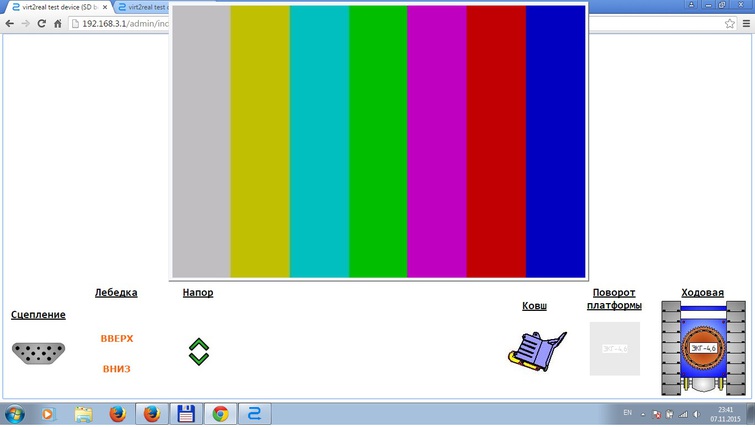
Управление осуществили через веб-интерфейс от клавиш клавиатуры видеотрансляция через Virt2real Player. Пытался сделать через gstreamer, но почему-то при наведении камеры на монитор видео вырубалось, в Virt2real Player такого нету.



Ну и видео с его работы))) И небольшое анонс 2 части статьи)))
Писав заявку на грант, мы планировали лишь программно смоделировать процесс экскаватора и с помощью платформы управления произвести определенные замеры по которым и произвести исследовательскую работу, но как оказалось уже после получения гранта, в закромах (штольне) горного факультета нашелся экскаватор, точная копия экскаватора ЭКГ-4,6 1973 года в масштабе 1:10, массой 200 кг и в жутком состоянии.

Старый(80 Вт) и новый (150 Вт) двигателиВ процессе разбора экскаватора и устранения изношенных или сломанных деталей было обнаружено, что разработчики не установили механизмы поворота гусениц, хотя на пульте управления кнопки по их управлению были. Проект всё усложнялся.
Гусеничная тележка перед и после покраской
Единственное что смогли найти более-менее в нашем городе подходящее это активатор, стоящий на замках дверях автомобиля. Усилие у него в 5 кг.
 В дальнейшем, когда всё собралось на место, их усилия вообще не хватало на отключения то одной то другой гусеницы на ходу, но программно смогли решить эту проблему путем отката назад в противоположную сторону движения перед поворотом экскаватора.
В дальнейшем, когда всё собралось на место, их усилия вообще не хватало на отключения то одной то другой гусеницы на ходу, но программно смогли решить эту проблему путем отката назад в противоположную сторону движения перед поворотом экскаватора.Вдобавок, оказалось неработоспособной система открывания ковша устроенное на электромагнитном реле, поэтому был сконструирован механизм «Открывания ковша и автоматического сматывания металлического троса» на основе заводной пружины и двигателя от электродрели.
Кстати на данных фото видно отличие данной модели от реального экскаватора – прикрученные нами два 3 мм уголка, позволяющие при давлении ковшом в землю поднимать чуть–чуть перед или одну из гусениц как это делают гидравлические экскаваторы.
.1458451254237.png)
Для автономной работы был установлен генератор на 1 кВт (GNR-1000). Самое интересное то что, куплен он был в Москве, во время чемпионата по горному делу, и летел с нами в Читу в багажном отделении (вот мы с ним тогда все натаскались).
Для работы в помещении был установлен 600 Вт компьютерный блок питания Cooler master, на просторах интернета видел как от той же фирмы, но менее мощный блок питания заводил автомобиль.


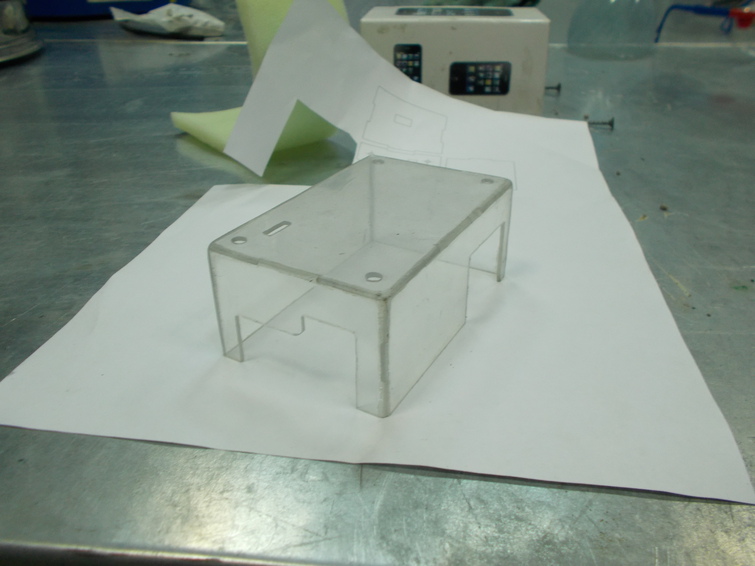
Корпус в процессе сборки 
На фото окончательный (обляпанный) корпус

Разработаны и спаяны драйвера двигателей, так как найти подходящие и купить, оказалось сложнее научится самому паять (до этого проекта паять не умел). Кстати, при разработки драйверов задавал также вопросы на Паркфлаере, спасибо тем, кто тогда помог.
Текстолит с рисунком до протравки и после Плата двигателя хода
Управление осуществили через веб-интерфейс от клавиш клавиатуры видеотрансляция через Virt2real Player. Пытался сделать через gstreamer, но почему-то при наведении камеры на монитор видео вырубалось, в Virt2real Player такого нету.


Ну и видео с его работы))) И небольшое анонс 2 части статьи)))













отпишите тему сюда http://forum.rcdesign.ru/f108/
както взгрустнулось. дедушки такую машину чуть не на паяльных лампах склеили.
валялась потом 40 лет по падвалам,теперь инновацию из неё лепят.
Нет идея правильная, все в ёлочку, просто.... дедушкины штаны донашиваем((
Ах да. тут же нужно за пультом сидеть. Тогда не, лучше самому капнуть и спину размять тоже полезно быват....
Нас электричество избавит от родОв - нажал на кнопочку - и Человек готов ...." (: